
ON THE IMPORTANCE OF THE GRID SIZE FOR GENDER
RECOGNITION USING FULL BODY STATIC IMAGES
Carlos Serra-Toro
1,3
, V. Javier Traver
1,3
, Ra
´
ul Montoliu
2,3
and Jos
´
e M. Sotoca
1,3
1
DLSI,
2
DICC &
3
iNIT, Universitat Jaume I, 12071 Castell
´
on, Spain
Keywords:
Gender recognition, Soft biometrics, Machine learning.
Abstract:
In this paper we present an study on the importance of the grid configuration in gender recognition from
whole body static images. By using a simple classifier (AdaBoost) and the well-known Histogram of Oriented
Gradients features we test several grid configurations. Compared with previous approaches, which use more
complicated classifiers or feature extractors, our approach outperforms them in the case of the frontal view
recognition and almost equals them in the case of the mixed view (i.e. frontal and back views combined
without distinction).
1 INTRODUCTION
The characterization of people according to some cri-
terion (e.g. age, ethnicity, or gender) in digital im-
ages and videos is relevant for many applications of
scientific and social interest. Some recent research
has been done concerning the classification of peo-
ple according to their gender. Most of them use a
facial approach (Moghaddam and Yang, 2002) while
others try to classify the gender of people according
to their gait (Yu et al., 2009). However, there is not
much work done concerning gender classification us-
ing whole body static images of standing people and
the first contribution is as recent as (Cao et al., 2008).
In this paper we study the gender recognition of
a single, standing person using just one whole body
static image. This is a complex problem since gen-
der recognition is a difficult task even for human be-
ings since, although there are a number of heuristics
that can partially guide the design of an algorithm,
there are many exceptions that make them unreliable
in general. Furthermore, detecting those conditions is
also a problem in itself.
The tendency in the machine learning community
seems to be to give more importance to find compli-
cated or newer descriptors, or combination of several
existing descriptors or classifiers, to achieve more ac-
curacy. This tendency sometimes leads to overlook
other simpler aspects of the problems that can impact
on the global accuracy. In this paper we show that,
in the case of gender recognition from whole body
static images, choosing an optimal grid for classifica-
tion can be as important as, and sometimes more im-
portant than, choosing a complicated feature extractor
or classifier to perform the recognition. We present an
study on the importance of the grid configuration for
gender classification, achieving results comparable to
those obtained by previous works (Section 2).
2 STATE OF THE ART
To the best of our knowledge, there are currently as
few as four published papers addressing the problem
of gender recognition from whole body static images.
This section is a review of these works.
The first documented approach to gender recogni-
tion from static images was (Cao et al., 2008). They
manually labeled (see Section 4.1) the CBCL pedes-
trian database (Oren et al., 1997), releasing the first
publicly available dataset for the evaluation of gen-
der classification. They created a classifier inspired
by AdaBoost (Freund and Schapire, 1995), based on
a part-based representation of the body, named Part-
based Gender Recognition (PBGR), in which every
part provided a clue of the gender of the person in the
image. In each round of the algorithm, they first se-
lected the most optimal patch of the image and then
trained a learner using only the Histogram of Ori-
ented Gradients (HOG) features (Dalal and Triggs,
2005) corresponding to that part of the image. They
achieved a recognition rate of 75.0% for the mixed
view, and 76.0% and 74.6% when considering just the
334
Serra-Toro C., Javer Traver V., Montoliu R. and M. Sotoca J..
ON THE IMPORTANCE OF THE GRID SIZE FOR GENDER RECOGNITION USING FULL BODY STATIC IMAGES.
DOI: 10.5220/0003323803340339
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 334-339
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

frontal or the back view images, respectively.
The second contribution was (Collins et al., 2009),
who investigated a number of feature extractors and
noticed that the best results in gender recognition
were achieved using a combination of both a shape
(based on an edge map) and a colour (based on hue
histograms (van de Sande et al., 2008)) extractors
combined using a linear kernel support vector ma-
chine (SVM) classifier. They only focused on frontal
view images and randomly balanced the CBCLdataset
so that there were 123 images of each gender. Also,
they cropped each image so that its size was approx-
imately the bounding box of the person represented
in it. They reported an accuracy of 76.0% (the same
rate as (Cao et al., 2008) for the frontal views) with
a good balance between the male and the female ac-
curacy. (Collins et al., 2009) repeated the experiment
with the VIPeR dataset (Gray et al., 2007) (a larger
dataset with almost 300 images for each gender) and
achieved 80.6% of accuracy in frontal view images.
In a newer contribution, (Collins et al., 2010)
combined the VIPeR and CBCL images to create
a database of 413 images of each gender, all in
frontal view. They obtained the “eigenbody” im-
ages, computed using the principal component anal-
ysis (PCA) (Jolliffe, 2005) over the raw images data
and over the edge map of the images. They realized
that the gender from whole body image discrimina-
tion seems to be encoded by a combination of several
PCA components. They chose the top components
from both the raw and edgemap data and combined
them using a SVM, resulting in a recognition accu-
racy of 66%.
Very recently, (Guo et al., 2010) reported an accu-
racy of 80.6% using only the CBCL dataset with (Cao
et al., 2008) manual labelling, without balancing and
without cropping the images and considering both
frontal and back view combined (mixed view). They
represented each image with biologically-inspired
features (BIF) (Serre et al., 2007) combined with sev-
eral manifold learning techniques. They designed a
classification framework where the type of view was
considered. Their accuracy rate was 80.6%, which is,
to the best of our knowledge, currently the best gender
recognition rate published with the CBCL dataset.
In this paper we intend to explore the impact of the
grid configuration in the gender recognition task, an
aspect that has not been yet taken into consideration,
by using a simple classifier.
3 APPROACH
We consider images showing a whole body picture of
a single, still standing person in frontal or back view.
The persons shown in all the pictures are approxi-
mately aligned and scaled so that different persons in
different images all take up a similar space.
Each gray-scale image I is described using a fea-
ture vector, v
I
. Each image is divided into smaller
rectangles, called cells, whose size are defined by
a r × c grid applied over the picture, with r being
the number of windows across the height of the im-
age, and c being the number of windows across its
width. There is an overlap between adjacent cells of
50%, both vertically and horizontally. For each cell, a
Rectangular HOG (R-HOG) (Dalal and Triggs, 2005)
feature vector is obtained, so that the resulting fea-
ture vector v
I
for the image I is the concatenation of
all the feature vectors obtained for each of its cells:
v
I
= v
I
1
v
I
2
. . . v
I
rc
, with v
I
γ
being the feature vector cor-
responding to cell γ of the image I.
In order to classify each image as representing
a male or a female we use AdaBoost (Freund and
Schapire, 1995). We use decision stumps as the weak
learner in the same way as (Cao et al., 2008) do, and
use their same variant of AdaBoost (see Algorithm 1
of (Cao et al., 2008) for the details).
4 EXPERIMENTATION
4.1 Image Dataset
We use the CBCL pedestrian image database
1
(Oren
et al., 1997), not designed initially to gender recog-
nition, but used by other authors (Section 2) for this
purpose. Images are all 64 × 128 pixel size, showing
one pedestrian standing in frontal or back view, hor-
izontally and vertically aligned so that their height is
about 80 pixels from their shoulders to their feet.
We use (Cao et al., 2008)’s publicly available
manual labelling of the CBCL database according to
pedestrians’ gender. This labelling consists of 600
men and 288 women. The wiews are also classified:
51% (frontal) and 49% (back) for male images, and
39% (frontal) and 61% (back) for female images.
4.2 Implementation Details
The experiments were executed using an implemen-
tation of a version of the R-HOG (Dalal and Triggs,
2005). In our implementation we consider only gray-
level images and therefore the information of the
1
http://cbcl.mit.edu/cbcl/software-datasets/
PedestrianData.html
ON THE IMPORTANCE OF THE GRID SIZE FOR GENDER RECOGNITION USING FULL BODY STATIC IMAGES
335

colour is lost, since we believe that the gender infor-
mation is primarily codified in the shape of the figure.
Since our purpose was the study of the importance
of the grid configuration, we have simplified the block
schema used by (Dalal and Triggs, 2005) and we do
not group adjacent cells into a block, and therefore
no normalization is done between the cells within a
block. Since (Dalal and Triggs, 2005) report best re-
sults with respect to pedestrian detection when block
normalization is done, it is possible that gender recog-
nition benefit too from this schema. Since our pur-
pose was the study of the grid configuration and not
the clustering between its cells, we left the study of
clustering them into blocks as future work.
4.3 Experiments with the Grid Size
In order to verify our hipothesis (i.e. choosing an opti-
mal grid is as important as using a complex algorithm
with respect to gender recognition from static images)
we have tested several grid configurations over the
image. The idea is to find an optimal grid for gen-
der recognition and then achieve an accuracy similar
to those proposed in the literature (Section 2) using a
simpler algorithm (AdaBoost, in our case).
As stated in Section 3, our grid consists of an uni-
formly sampled cartesian r × c grid with 50% of cell
overlap. We decided to test a wide range of grid con-
figurations, resulting in several cell sizes from con-
siderable big (about 21 × 21 pixels) to quite small
(about 3 × 3 pixels), and therefore we tested r ∈ S
r
,
S
r
= {6, 9, . . . , 42} and c ∈ S
c
, S
c
= {3, 6, . . . , 24} val-
ues. Therefore, |S
r
| × |S
c
| = 13 × 8 = 104 possible
grids were explored. In all cases we train and classify
using the AdaBoost described in Section 3.
The results are averaged using a 5-fold cross vali-
dation, in the same way as the previous contributions
do (Section 2). Our results are shown in Tables 1, 2
and 3 for frontal, back and mixed view, respectively.
We highlight the optimal grid (the one with best ac-
curacy) for each view. According to our experimen-
tation, the optimal grid configurations for each view
are: 21 ×12 for the frontal view, 36 × 21 for the back
view and 15 × 15 for the mixed view.
It is interesting to notice that the optimal recog-
nition grid is denser than the one used by (Dalal and
Triggs, 2005) in their pedestrian detector since they
propose a grid with cells of 6 × 6 pixels resulting in a
grid of 210 cells for a 128 × 64 image, while our opti-
mal grid results to be of 252 cells for the frontal view,
756 cells for the back view and 225 for the mixed
view. We think this suggests that gender recognition
depends more on certain parts of the silhouette rather
than in the silhouette of the whole body, since finer
grids allows the classifier to be more focused on par-
ticular aspects of the shape than grids with less divi-
sions are able to. This finding is in agreement with
those recently reported by (Collins et al., 2010).
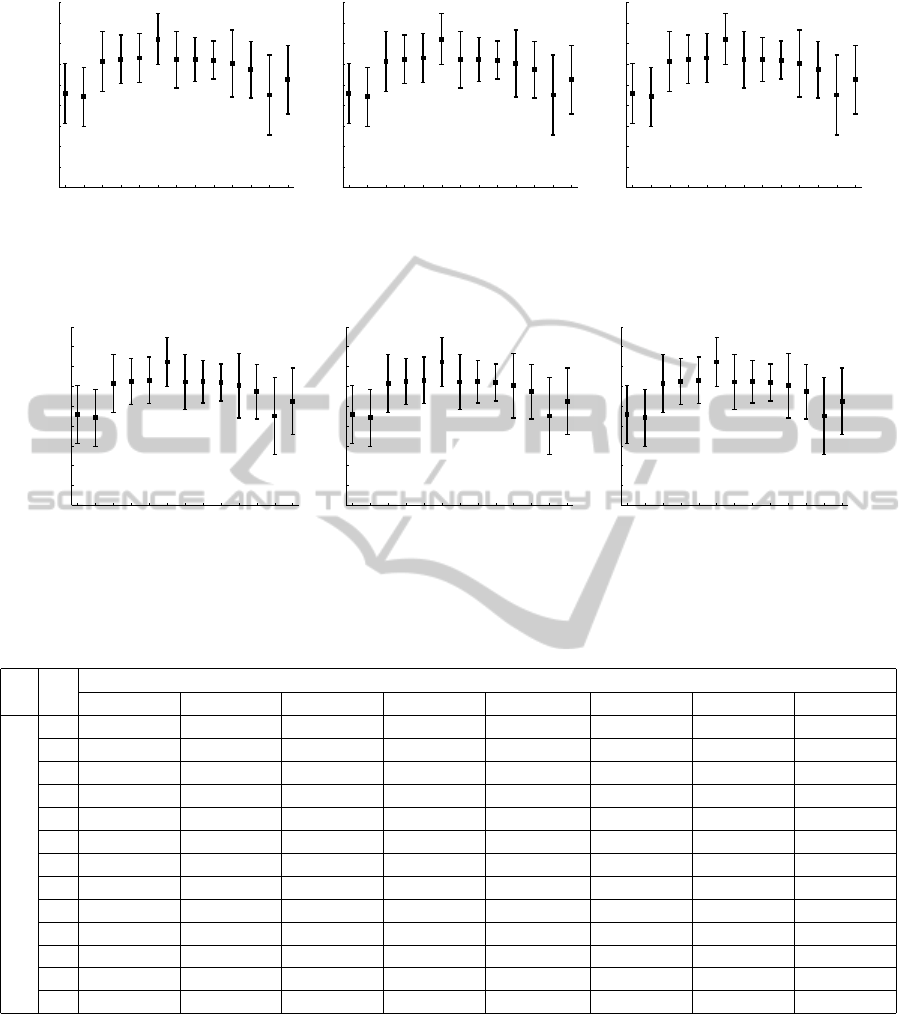
Figures 1 and 2 summarizes the results of the Ta-
bles 1, 2 and 3, showing the mean accuracy for each
combination of the value of the number of windows
across the height (r) or across the width (c) of the im-
age, for each view. As it can be seen, in general the
results improve as the grid makes denser, up to a cer-
tain point at which the accuracy degrades gradually.
It is interesting to notice that the top for the frontal
view is more to the left than the top for the back view.
This indicates that denser grids are needed to recog-
nize gender from back view images, probably because
this view is more difficult, even for humans beings.
The highest accuracy for the mixed view is more on
the left but, contrary to what happens with the other
views, high values for r or c result in a high variance
of the results, and thus the recognition behaviour is
more unstable with denser grids. This is probably the
reason why the optimal recognition grid for the mixed
view, 15 ×15, is the one with less density of cells.
4.4 Study of the Overfitting of AdaBoost
The results shown in Tables 1, 2 and 3 are obtained
using 400 iterations for AdaBoost. There is some
controversy about the convenience of stopping early
in AdaBoost to not overfit the data, as (Zhang and
Yu, 2005) claims, or to perform a large number iter-
ations so that the overfitting reduces, as (Mease and
Wyner, 2008) experimentally shows. Results proba-
bly depend on the nature of each problem, so we have
studied the evolution of the accuracy as the number of
iterations of AdaBoost increases from 100 iterations
to 1500, in steps of 100, for each view.
The results obtained, using the optimal grid found
in Section 4.3 for each view, are shown in Figure 3.
As it can be seen, the increase of the number of weak
learners up to 300 and 400 in the case of frontal and
mixed view, respectively, and up to 600 in the case
of the back view, increases the accuracy, and then the
recognition rate becomes more or less stable in the
three cases. We think in our case AdaBoost is not
overfitting the data because, if that were the case, then
this would result in an increase of the accuracy with
the increasing of the number of the iterations.
4.5 Comparison with other proposed
Methods
We compare our results with those reported by the
other existing published approaches (Section 2) in
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
336
6 9 12 15 18 21 24 27 30 33 36 39 42
64
66
68
70
72
74
76
78
80
82
Number of windows across the height of the image (r)
Averaged accuracy (%)
6 9 12 15 18 21 24 27 30 33 36 39 42
64
66
68
70
72
74
76
78
80
82
Number of windows across the height of the image (r)
Averaged accuracy (%)
6 9 12 15 18 21 24 27 30 33 36 39 42
64
66
68
70
72
74
76
78
80
82
Number of windows across the height of the image (r)
Averaged accuracy (%)
(a) Frontal view (b) Back view (c) Mixed view
Figure 1: Mean accuracies (%) and standard deviations for each value of the number of windows across the height of the
image (r) for each view.
6 9 12 15 18 21 24 27 30 33 36 39 42
64
66
68
70
72
74
76
78
80
82
Number of windows across the height of the image (r)
Averaged accuracy (%)
6 9 12 15 18 21 24 27 30 33 36 39 42
64
66
68
70
72
74
76
78
80
82
Number of windows across the height of the image (r)
Averaged accuracy (%)
6 9 12 15 18 21 24 27 30 33 36 39 42
64
66
68
70
72
74
76
78
80
82
Number of windows across the height of the image (r)
Averaged accuracy (%)
(a) Frontal view (b) Back view (c) Mixed view
Figure 2: Mean accuracies (%) and standard deviations for each value of the number of windows across the width of the
image (c) for each view.
Table 1: Accuracies (%) obtained using only the frontal view images using several grids of sizes r × c.
Number of windows across the width (c)
3 6 9 12 15 18 21 24
No. of windows across height (r)
6 68.6 ±3.4 69.8 ± 3.0 72.9 ±4.8 75.0 ± 4.8 75.7 ±7.3 76.4 ± 4.2 75.2 ±4.4 71.7 ± 3.7
9 66.7 ±2.4 71.9 ± 2.5 74.0 ±3.9 74.0 ± 4.2 73.8 ±5.5 75.0 ± 2.2 75.7 ±2.5 71.4 ± 1.9
12 70.5 ± 1.8 75.5 ± 3.6 80.0 ± 5.2 76.7 ± 2.5 78.8 ± 1.0 78.1 ±3.5 75.5 ± 2.7 75.2 ±3.4
15 71.9 ± 5.4 75.2 ± 6.0 77.4 ± 4.5 79.0 ± 2.5 79.0 ± 2.5 76.9 ±3.6 77.1 ± 5.2 75.2 ±5.9
18 72.6 ± 5.0 78.6 ± 4.9 79.0 ± 2.7 79.0 ± 3.1 77.6 ± 4.1 74.5 ±3.9 76.2 ± 3.5 75.2 ±4.6
21 74.5 ± 4.6 78.1 ± 3.9 78.3 ± 3.9 81.9 ± 5.0 81.0 ± 5.3 80.0 ± 4.9 77.9 ± 3.4 76.0 ± 4.3
24 71.9 ± 6.0 76.9 ± 5.0 79.3 ± 1.8 78.1 ± 3.9 79.0 ± 4.8 75.2 ±3.3 77.9 ± 2.7 73.1 ±4.3
27 72.6 ± 3.0 76.7 ± 2.9 76.4 ± 3.7 77.1 ± 3.3 79.3 ± 3.7 76.9 ±5.4 78.3 ± 1.6 74.3 ±5.0
30 75.2 ± 2.8 76.9 ± 5.2 76.0 ± 2.7 78.1 ± 1.8 78.3 ± 2.4 77.6 ±5.4 76.4 ± 3.3 72.6 ±3.6
33 71.4 ± 6.2 75.7 ± 6.3 79.0 ± 2.6 80.5 ± 3.8 79.5 ± 1.8 74.0 ±5.0 74.8 ± 3.4 73.6 ±6.3
36 72.9 ± 4.3 74.3 ± 4.5 75.7 ± 1.8 79.3 ± 3.0 79.3 ± 3.8 76.0 ±7.2 74.5 ± 5.3 71.7 ±6.0
39 68.3 ± 3.4 75.5 ± 4.7 76.4 ± 1.6 77.1 ± 3.9 74.8 ± 4.7 70.0 ±7.6 74.8 ± 5.7 67.1 ±6.4
42 73.1 ± 2.0 76.9 ± 3.0 77.4 ± 4.8 76.2 ± 2.7 76.2 ± 2.7 76.2 ±3.0 72.6 ± 5.5 67.4 ±4.3
Table 4. We left out of the comparison the work
by (Collins et al., 2010) since they do not use the same
image dataset as the other works (and this paper) use
and therefore the results are not comparable.
As it can be seen, we achieve the highest pub-
lished accuracy in the frontal view (+2.4%), nearly
match the highest rate on the mixed view (−1.2%)
and stay below the highest accuracy with the back
view (−3.2%), always using a simpler classifier (Ad-
aBoost, Section 3) and a reduced implementation of a
simple feature extractor (R-HOG, Section 3).
5 CONCLUSIONS
We have shown that denser grids than those origi-
nally proposed for pedestrian detection by (Dalal and
ON THE IMPORTANCE OF THE GRID SIZE FOR GENDER RECOGNITION USING FULL BODY STATIC IMAGES
337
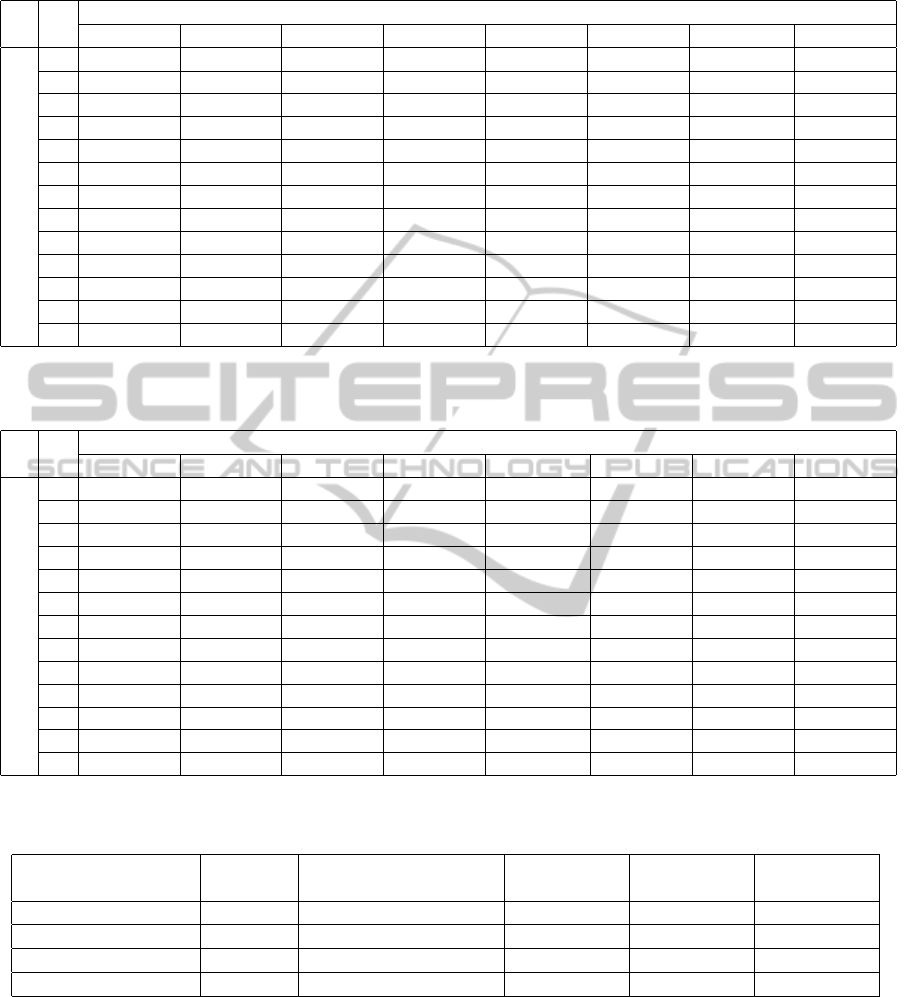
Table 2: Accuracies (%) obtained using only the back view images using several grids of sizes r × c.
Number of windows across the width (c)
3 6 9 12 15 18 21 24
No. of windows across height (r)
6 64.5 ±6.7 67.3 ± 2.7 67.3 ±6.3 69.0 ± 2.5 74.2 ±3.7 69.5 ± 2.4 70.9 ±3.5 68.0 ± 2.9
9 67.1 ±3.4 69.9 ± 3.1 69.9 ±4.7 75.4 ± 3.8 72.7 ±3.8 70.3 ± 5.6 70.5 ±3.1 71.2 ± 1.4
12 73.9 ± 5.6 74.6 ± 3.2 74.2 ± 3.3 74.6 ± 1.9 77.1 ± 4.7 71.6 ± 1.5 75.6 ± 2.9 75.4 ±3.7
15 68.2 ± 4.4 70.7 ± 5.4 73.9 ± 3.1 73.3 ± 5.1 76.3 ± 2.4 77.6 ± 2.6 76.3 ± 4.4 76.3 ±4.3
18 72.2 ± 2.1 71.8 ± 2.3 72.9 ± 2.3 77.3 ± 4.2 75.7 ± 5.1 75.4 ± 2.1 80.6 ± 2.9 75.7 ±3.4
21 72.7 ± 2.1 73.1 ± 3.7 73.9 ± 1.1 77.6 ± 5.5 76.7 ± 6.9 75.2 ± 3.6 79.9 ± 1.7 78.4 ±2.2
24 66.2 ± 2.8 73.3 ± 2.5 76.1 ± 3.7 78.8 ± 2.9 76.3 ± 3.5 77.6 ± 6.3 78.4 ± 2.7 76.5 ±3.9
27 70.7 ± 4.4 73.1 ± 1.9 78.4 ± 2.2 79.3 ± 2.4 77.1 ± 2.1 78.4 ± 2.4 78.2 ± 3.6 73.9 ±4.0
30 70.7 ± 3.4 75.6 ± 4.4 75.9 ± 0.9 79.5 ± 3.2 74.6 ± 3.7 79.7 ± 3.4 79.9 ± 2.5 76.3 ±2.8
33 72.0 ± 2.2 74.3 ± 3.9 74.4 ± 2.0 76.9 ± 4.9 78.2 ± 3.2 79.3 ± 3.3 78.8 ± 1.6 72.5 ±6.9
36 72.4 ± 5.4 72.2 ± 2.3 73.9 ± 2.5 77.8 ± 2.2 75.4 ± 5.7 76.1 ± 2.9 80.8 ± 2.3 71.4 ± 8.8
39 68.2 ± 3.5 69.0 ± 4.8 74.6 ± 4.4 76.3 ± 3.4 78.6 ± 2.0 75.6 ± 4.4 71.4 ± 6.1 69.4 ±1.4
42 68.2 ± 3.5 72.4 ± 7.0 73.7 ± 3.1 77.6 ± 3.5 75.4 ± 3.8 73.1 ± 4.9 72.8 ± 3.7 63.7 ±7.1
Table 3: Accuracies (%) obtained using both the frontal and back view images (i.e. considering both views without distinction
between them) using several grids of sizes r × c.
Number of windows across the width (c)
3 6 9 12 15 18 21 24
No. of windows across height (r)
6 63.1 ±2.9 68.0 ± 1.5 70.7 ±0.5 67.8 ± 2.9 71.5 ±4.7 69.9 ± 1.8 69.9 ± 3.6 70.5 ± 2.7
9 68.9 ±4.0 73.3 ± 2.2 70.4 ±2.9 72.4 ± 2.8 72.4 ±1.1 72.6 ± 4.9 73.1 ± 3.4 73.9 ± 1.6
12 69.6 ± 2.3 73.1 ± 3.1 75.0 ± 2.2 73.0 ± 1.6 76.1 ± 5.3 74.8 ±2.7 75.9 ± 4.3 71.6 ±3.3
15 69.6 ± 1.8 73.7 ± 2.0 75.0 ± 2.5 76.2 ± 2.3 79.4 ± 1.4 73.5 ± 2.4 74.2 ± 2.2 78.3 ±1.6
18 71.2 ± 3.8 74.3 ± 3.2 74.7 ± 1.1 77.0 ± 4.0 75.9 ± 1.1 76.8 ±2.8 77.8 ± 2.2 74.2 ±1.6
21 73.5 ± 3.0 76.9 ± 2.6 77.1 ± 1.9 75.9 ± 3.5 76.6 ± 2.3 77.0 ±2.1 77.9 ± 3.1 76.1 ±4.1
24 70.1 ± 4.0 72.2 ± 1.2 75.1 ± 2.1 75.8 ± 2.1 75.6 ± 2.7 76.9 ±4.0 77.8 ± 4.0 69.6 ±3.9
27 70.4 ± 2.3 73.4 ± 3.7 74.2 ± 3.5 78.0 ± 1.7 77.0 ± 4.4 75.1 ±4.4 75.1 ± 2.5 70.9 ±3.2
30 73.3 ± 2.4 74.5 ± 2.5 74.9 ± 2.8 75.8 ± 2.7 76.0 ± 2.5 72.4 ±2.3 72.9 ± 3.2 72.0 ±3.9
33 71.8 ± 2.0 73.8 ± 4.3 77.1 ± 2.4 77.7 ± 2.9 76.6 ± 4.3 74.4 ±2.4 73.9 ± 5.5 62.9 ±8.9
36 69.5 ± 3.3 74.3 ± 4.0 77.5 ± 3.1 74.3 ± 2.9 77.0 ± 3.6 70.3 ±4.2 67.9 ± 6.0 66.2 ±0.8
39 72.4 ± 0.6 72.2 ± 2.5 75.0 ± 3.5 78.2 ± 3.7 75.6 ± 2.2 62.9 ±6.8 64.0 ± 1.8 62.5 ±4.9
42 70.7 ± 2.2 73.0 ± 2.3 76.2 ± 3.2 77.4 ± 2.8 72.3 ± 3.1 66.7 ±5.1 63.6 ± 2.5 62.8 ±2.3
Table 4: Comparison between our approach and the previous published works addressing the gender recognition from whole
body static images (Section 2) reporting results using the same dataset as ours (CBCL pedestrian database (Oren et al., 1997)).
Balanced Uses (Cao et al., 2008) Frontal view Back view Mixed view
dataset? manual labelling? accuracy accuracy accuracy
(Cao et al., 2008) No Yes 76.0 ± 1.2 74.6 ± 3.4 75.0 ± 2.9
(Collins et al., 2009) Yes No 76.0 ± 8.1 Not reported Not reported
(Guo et al., 2010) No Yes 79.5 ± 2.6 84.0 ± 3.9 80.6 ± 1.2
Ours No Yes 81.9 ± 5.0 80.8 ± 2.3 79.4 ± 1.4
Triggs, 2005) are needed for gender recognition. The
optimal grid varies with the point of view of the fig-
ure resulting in a 360% times denser grid in the case
of the back view and 120% times denser in the case
of the frontal view, and comparable density while rec-
ognizing in the mixed view. This variation leads us to
guess that (Guo et al., 2010) approach (i.e. first de-
tecting the view and then recognizing the gender us-
ing an optimal classifier for that view) is possibly a
directive to follow and requires further study.
The importance of the grid is evidenced by the
state of the art results, outperformed in the case of
the frontal view and nearly equalled in the case of the
mixed view, using classifiers simpler than those pro-
posed in the literature (Section 2) and a simple feature
extractor (R-HOG, Section 3).
We think there is a need for a dataset specifically
created to test gender recognition algorithms, large
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
338

100 200 300 400 500 600 700 800 900 1000 1100 1200 1300 1400 1500
75
76
77
78
79
80
81
82
83
84
Number of iterations for AdaBoost
Accuracy (%)
Frontal view
Back view
Mixed view
Figure 3: Evolution of the accuracy (%) as the number of
iterations for AdaBoost increases, obtained for the optimal
grid found in Section 4.3 for each view: 21 × 12 for the
frontal, 36 × 21 for the back, and 15 × 15 for the mixed.
enough to allow the use of a separate test set different
from that used in the validation scheme in order to ob-
tain a more realistic accuracy rate (Alpaydın, 2010).
Another aspect to be considered in the future is
the unbalanced distribution of the classes. One way
of managing the unbalanced nature of a dataset is the
method proposed by (Kang and Cho, 2006), used for
example in a recent work dealing with gender recog-
nition through gait (Mart
´
ın-F
´
elez et al., 2010).
ACKNOWLEDGEMENTS
The authors acknowledge the Spanish research pro-
gramme Consolider Ingenio-2010 CSD2007-00018,
and Fundaci
´
o Caixa-Castell
´
o Bancaixa under project
P1·1A2010-11. Carlos Serra-Toro is funded by
Generalitat Valenciana under the “VALi+d program
for research personnel in training” with grant code
ACIF/2010/135.
We thank Liangliang Cao (Cao et al., 2008) for
his help in understanding and reproducing their al-
gorithm PBGR (Section 2). This research uses the
CBCL pedestrian database (Oren et al., 1997) col-
lected by the Center for Biological & Computational
Learning (CBCL) at MIT.
REFERENCES
Alpaydın, E. (2010). Introduction to Machine Learning.
The MIT Press, Cambridge, Massachusetts.
Cao, L., Dikmen, M., Fu, Y., and Huang, T. S. (2008). Gen-
der recognition from body. In MM ’08: Proceeding of
the 16th ACM international conference on Multime-
dia, pages 725–728, New York, NY, USA.
Collins, M., Zhang, J., Miller, P., and Wang, H. (2009). Full
body image feature representations for gender profil-
ing. In IEEE ICCV Workshops, pages 1235–1242.
Collins, M., Zhang, J., Miller, P., Wang, H., and Zhou, H.
(2010). Eigenbody: Analysis of body shape for gender
from noisy images. In International Machine Vision
and Image Processing Conference.
Dalal, N. and Triggs, B. (2005). Histograms of oriented gra-
dients for human detection. In IEEE CVPR, volume 1,
pages 886–893.
Freund, Y. and Schapire, R. (1995). A desicion-theoretic
generalization of on-line learning and an application
to boosting. In Computational Learning Theory, vol-
ume 904 of LNCS, pages 23–37. Springer Berlin / Hei-
delberg.
Gray, D., Brennan, S., and Tao, H. (2007). Evaluating ap-
pearance models for recognition, reacquisition, and
tracking. Proc. IEEE International Workshop on Per-
formance Evaluation for Tracking and Surveillance
(PETS).
Guo, G., Mu, G., and Fu, Y. (2010). Gender from body:
A biologically-inspired approach with manifold learn-
ing. In Computer Vision ACCV 2009, volume 5996 of
LNCS, pages 236–245. Springer Berlin / Heidelberg.
Jolliffe, I. (2005). Principal Component Analysis. Encyclo-
pedia of Statistics in Behavioral Science. John Wiley
& Sons, Ltd.
Kang, P. and Cho, S. (2006). EUS SVMs: Ensemble of
under-sampled SVMs for data imbalance problems.
In Neural Information Processing, volume 4232 of
LNCS, pages 837–846. Springer Berlin / Heidelberg.
Mart
´
ın-F
´
elez, R., Mollineda, R. A., and S
´
anchez, J. S.
(2010). A gender recognition experiment on the CA-
SIA gait database dealing with its imbalanced na-
ture. In VISAPP, volume 2, pages 439–444, Angers
(France).
Mease, D. and Wyner, A. (2008). Evidence contrary to
the statistical view of boosting. Journal of Machine
Learning Research, 9:131–156.
Moghaddam, B. and Yang, M.-H. (2002). Learning gender
with support faces. IEEE PAMI, 24(5):707–711.
Oren, M., Papageorgiou, C., Sinha, P., Osuna, E., and Pog-
gio, T. (1997). Pedestrian detection using wavelet
templates. In IEEE CVPR, pages 193–99.
Serre, T., Wolf, L., Bileschi, S., Riesenhuber, M., and Pog-
gio, T. (2007). Robust object recognition with cortex-
like mechanisms. IEEE PAMI, 29(3):411–426.
van de Sande, K. E. A., Gevers, T., and Snoek, C. G. M.
(2008). Evaluation of color descriptors for object
and scene recognition. In IEEE CVPR, Anchorage,
Alaska, USA.
Yu, S., Tan, T., Huang, K., Jia, K., and Wu, X. (2009). A
study on gait-based gender classification. IEEE TIP,
18(8):1905–1910.
Zhang, T. and Yu, B. (2005). Boosting with early stopping:
Convergence and consistency. The Annals of Statis-
tics, 33(4):1538–1579.
ON THE IMPORTANCE OF THE GRID SIZE FOR GENDER RECOGNITION USING FULL BODY STATIC IMAGES
339
