
TOWARDS AFFORDABLE GESTURE BASED INTERFACES
An Exploration with Wii Remotes
Amy Ciavolino
CSEE, CoEIT, University of Maryland, Baltimore County, U.S.A.
Camille Marvin
Department of Computer Science, Harvey Mudd College, Claremont, CA, U.S.A.
Jason Creighton, James Coddington, Hans-Peter Bischof, Reynold Bailey
Rochester Institute of Technology, Henrietta, NY, U.S.A.
Keywords:
Natural user interface, Gesture control, Wii remote, User interaction.
Abstract:
The traditional keyboard and mouse computer interface is well suited for 2D applications such as document
editing, but as 3D environments become more prevalent there arises a need for new methods of user input.
An immersive 3D interface is preferable, but is often cost prohibitive. This paper presents the design and
implementation of a Natural User Interface (NUI), named NuWii. NuWii was designed to be used with the
Spiegel visualization framework for astrophysical data. The interface makes use of Nintendo Wii Remotes
as infrared tracking cameras to detect 3D gestures made by the user. These gestures are interpreted and used
to control the viewing camera’s parameters throughout the course of a visualization. Our project provides a
new, more intuitive way of manipulating the camera in the Spiegel visualization system. Furthermore, NuWii
provides an expandable base that could be used for gesture control in many other applications.
1 INTRODUCTION
Spiegel is a visualization system that was developed
to process and visualize large multidimensional data
from simulations of galactic events such as black-hole
mergers, event horizons, and gravity waves (Bischof,
2010; Bischof et al., 2006). Previous methods of user
input for working with 3D models in the Spiegel vi-
sualization framework were not intuitive. Ideally, we
want astrophysicists and other users to be able to view
and interact with the simulations in a simple and nat-
ural way. To accomplish this, we created NuWii, a
system that captures the user’s motions in 3D and uses
them to control the camera position in Spiegel. NuWii
is designed to be easily expandable to other applica-
tions that require 3D gesture input. Our implementa-
tion uses a two level gesture hierarchy to accommo-
date custom gesture input. We designed NuWii to be
portable, easy to set up, and affordable. NuWii uses
two Nintendo Wii Remotes to capture the gesture in-
put from the user. We have also developed an algori-
thm to extract the 3D point from the two images ac-
quired by the Wii Remotes instead of using propri-
etary software in order to keep the cost down for any-
one expanding upon our project.
2 PRIOR WORK IN THE FIELD
A significant amount of work has been done in the
area of human-computer interaction, 3D point recog-
nition, and natural user interfaces. A 3D hand recog-
nition system was presented in 2009 (Wang and
Popovi
´
c, 2009) and efforts are under way to develop a
3D user interface similar to the one seen in the movie
Minority Report (Underkoffler, 2010). There has even
been some previous experimentation with 3D interac-
tion in Spiegel (Bak, 2004). Several projects have
explored the use of Wii Remotes for stereo-vision
(Dehling, 2008), motion capture (Wang and Huang,
2008), and finger tracking (Lee, 2008). Most of the
projects done with Wii Remotes use MATLAB for ca-
224
Ciavolino A., Marvin C., Creighton J., Coddington J., Bischof H. and Bailey R..
TOWARDS AFFORDABLE GESTURE BASED INTERFACES - An Exploration with Wii Remotes.
DOI: 10.5220/0003322102240229
In Proceedings of the International Conference on Imaging Theory and Applications and International Conference on Information Visualization Theory
and Applications (IVAPP-2011), pages 224-229
ISBN: 978-989-8425-46-1
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

mera calibration and resolving points in 3D space.
However, using MATLAB limits the audience, afford-
ability, and flexibility of the software. Some previous
papers tracked multiple points in 3D, but did so only
in the context of head tracking (Cuypers et al., 2009).
Head tracking assumes a limited range of motion of
the points, making it easier to distinguish them. Other
projects involved only minimal error checking (Hay
et al., 2008). In contrast, NuWii is able to track two
points under more general conditions.
3 HARDWARE
We elected to use Nintendo Wii Remote for its afford-
ability, availability, and specialized camera hardware.
In NuWii, the cameras on the front of the Wii Re-
motes pick up infrared light reflected off the user’s
finger tips. Two arrays of infrared LEDs supply the
infrared light and finger slips, made from reflective
tape, reflect it back to the cameras. We also machined
a wooden board to hold the Wii Remotes in place. The
notches in our board hold the Wii Remotes two feet
apart and angled 22.5 degrees inward, but any reason-
able angle with overlapping fields of view could be
used. All the hardware used in NuWii is available to
the average consumer. A photograph of the NuWii
setup is shown in Figure 1.
Figure 1: Photograph the NuWii setup. The user’s gestures
are being tracked by the two infrared cameras.
3.1 The Wii Remote
The Wii Remote has a built-in 128x96 monochrome
camera. By using sub-pixel analysis, it can track up to
four separate points of infrared light and return their
coordinates in a 1024x768 range (Wii Brew, 2010).
The field of view of the camera is 33.75 degrees ver-
tical and 45 degrees horizontal. These values can be
derived from the resolution of the camera (Lee, 2008).
The Wii Remotes use the Bluetooth HID proto-
col to communicate with their host. However, they do
not use the standard data types and are meant only to
communicate with a Wii gaming system. This lack of
complete compliance makes connecting the Wii Re-
motes to a computer somewhat complicated, but once
the connection has been made we have found it to be
stable. A great number of libraries in a variety of high
level languages have been written to facilitate easier
communication with the Wii Remotes and their pe-
ripherals (Wii Brew, 2010). We chose the motej li-
brary because it is open source, allowing us a greater
understanding of how it communicates with the Wii
Remotes. Additionally, both Spiegel and motej are
written in Java, making integration straightforward.
3.2 Infrared LED Arrays
Each Wii Remote is surrounded with infrared LEDs
that supply light to be reflected back to the cameras.
For each Wii Remote, we made an array of 48 LEDs.
The wavelength of the LEDs is 940 nm which is opti-
mal for the Wii Remotes’ cameras (Wii Brew, 2010).
The LEDs are arranged in eight groups wired in paral-
lel. Each group contains 6 LEDs and a 75 Ohm resis-
tor in series. The LED arrays are powered by a 12V,
1 amp power supply.
3.3 Finger Slips
We created two finger slips out of reflective tape that
easily slide on and off the user’s index finger and
thumb (Figure 2). The finger slips completely cover
the tips of the user’s fingers to ensure that the light
from the LEDs is reflected back to the cameras from
any angle. We built the finger slips out of 3M 3000X
Very High Gain Reflective Tape. In order to hold
the reflective tape together we used small pieces of
Nathan 3M Reflective tape. We also built finger slips
completely out of Nathan 3M Reflective tape. These
finger slips seemed to work just as well and were sig-
nificantly less expensive than their high gain counter-
parts. Nathan 3M Reflective tape is also more flexible
which made it easier to form the top of the finger slips.
Figure 2: Finger slips made of reflective tape. Nathan 3M
tape (index finger) and Very High Gain tape (thumb).
TOWARDS AFFORDABLE GESTURE BASED INTERFACES
- An Exploration with Wii Remotes
225
4 STEREO-VISION
To locate a point in 3D, data from two or more Wii
Remotes must be combined. NuWii uses two Wii Re-
motes. A third Wii Remote could be added to improve
accuracy, but it would require a more advanced setup
and increase the overall cost of the system. Our al-
gorithm uses trigonometry to find the location in 3D
space, given the angle of the Wii Remotes and their
distance apart.
4.1 Algorithm
The algorithm takes input from two Wii Remotes.
The output from the Wii Remotes is in the form of
(X, Y) points in the range (0, 0) to (768, 1024). The
algorithm assumes that the Wii Remotes are in the
same y and z plane and are placed at known angles in
the x plane. Deviating from the specified orientation
will produce errors in the final result. It is possible to
get usable output from the algorithm without know-
ing the distance between the Wii Remotes. However,
if the distance is known then the final output will have
the same unit as the distance. Steps 1-3 are repeated
for the input from both the left and right cameras.
Step 1. The range of the camera input is altered to
go from (-512, -384) to (512, 384). This is
done by subtracting half the maximum val-
ues for the respective axis (Figure 3).
Figure 3: Transforming the setup coordinates.
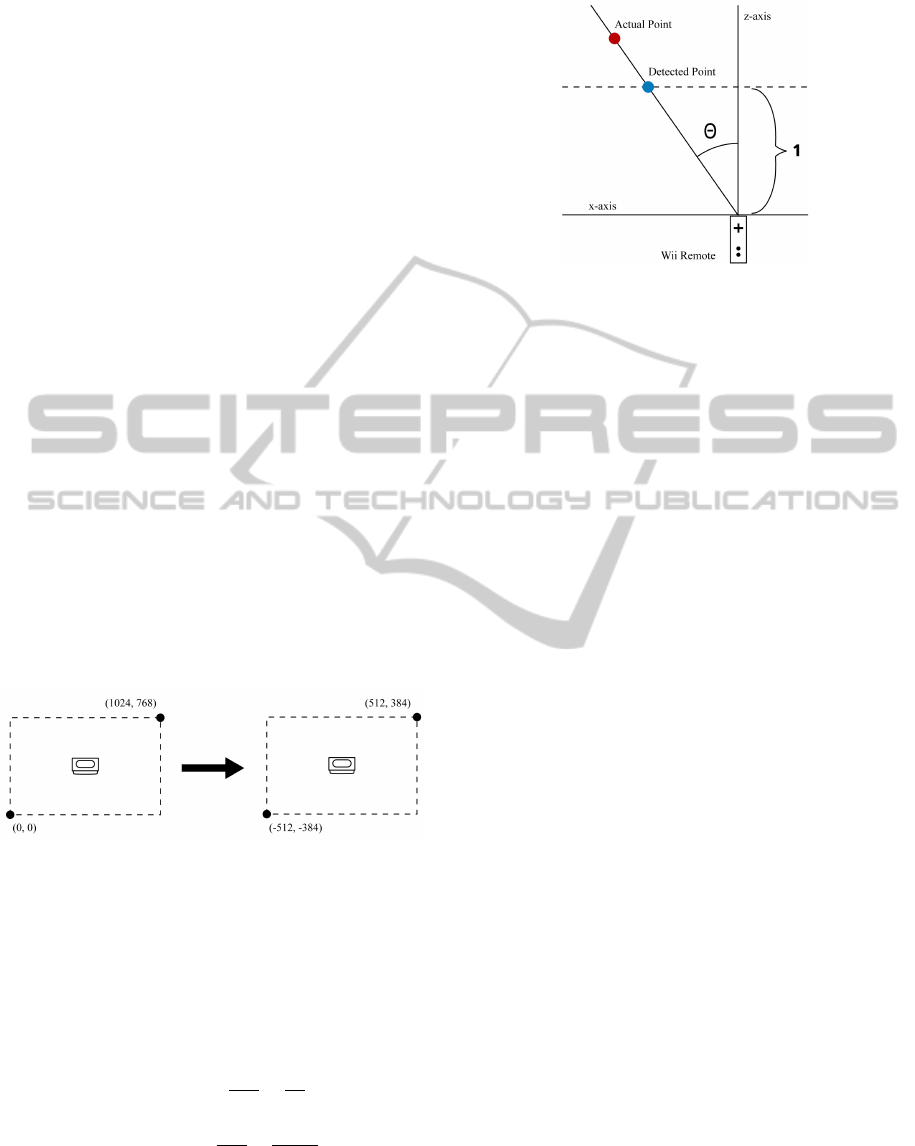
Step 2. Using the altered input, the points are nor-
malized by dividing the x value by 512, and
the y value by 384. The x result is then mul-
tiplied by half the horizontal field of view of
the camera and the y result is multiplied by
half the vertical field of view in order to find
the angles shown in Figures 4 and 5.
θ =
X
512
×
45
2
(1)
φ =
Y
384
×
33.75
2
(2)
Step 3. Trigonometry is used to find a normalized
point one unit away from the cameras.
X
0
= tan(θ) (3)
Figure 4: Top View.
Y
0
= tan(φ) (4)
Z
0
= 1 (5)
Step 4. After the normalized points are found, they
are rotated by α, the angle between the Wii
Remotes and the y-z plane shown in Fig-
ure 6. Rotating the points is not required if
the Wii Remotes are parallel. The following
equations are used to rotate the points:
X
0
= X
0
cos(α) + sin(α) (6)
Y
0
= Y
0
(7)
Z
0
= −1 ∗ X
0
sin(α) + cos(α) (8)
Step 5. The distance between the Wii Remotes is
added to the x value of the points from the
right Wii Remote (the right Wii Remote will
be on the left when looking into the cameras
of the remotes). The units of the final output
will be the same as the units used to measure
this distance. If the distance between the Wii
Remotes is unknown then 1 should be added
instead.
X
0
r
= X
0
r
+ d (9)
This step moves the points read by the right
camera into the correct coordinate system in
relation to the left camera.
Rays originating from the Wii Remotes passing
through these new left and right calculated points are
created. Figure 6 shows that the left camera is at the
origin (0,0,0) and the right camera is at (d,0,0) where
d is the distance between the Wii Remotes. A ray col-
lision algorithm is used to find the location along the
rays where they are closest to colliding. This location
is the approximate position of the point. The exact lo-
cation of the collision can not be calculated because
the rays will not collide perfectly due to error in the
data captured by the Wii Remotes.
IVAPP 2011 - International Conference on Information Visualization Theory and Applications
226
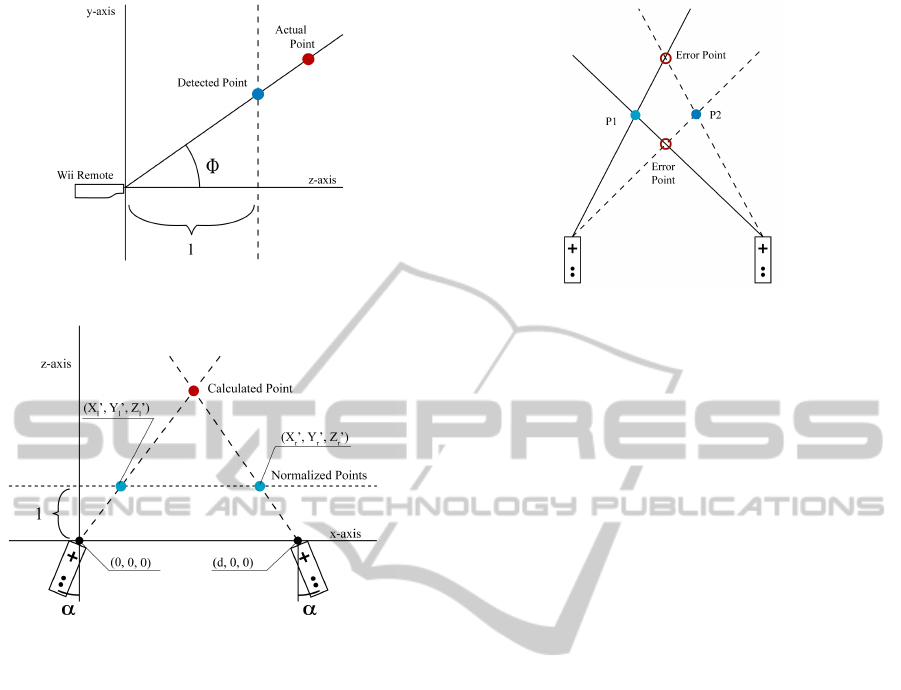
Figure 5: Side View.
Figure 6: Finding the 3D point.
4.2 Multiple Points
The algorithm described above senses one point.
However, reading two points introduces ambiguity
when both points lie in the same y plane. The problem
occurs because the Wii Remotes transmit only the co-
ordinates of the infrared points. This means that there
are no surrounding visual aids to help distinguish be-
tween the two points. Because of this limited infor-
mation, it can be impossible to tell which point from
the second Wii Remote corresponds to the point seen
by the first Wii Remote in certain situations.
When the points are not in the same y plane the ray
collision error can be used to match the correct points.
To distinguish between these points both possibilities
are tested and the pair with the smaller error is used.
This method does not work when the points are in the
same y plane because both pairs appear to be valid,
as shown in Figure 7. We leverage the knowledge
that the leftmost point on the first camera should be
paired with the leftmost point on the second camera
in most situations. When we cannot distinguish the
points using the above methods, we use the fact that
the Wii Remotes return the points that they detect in
the same order throughout a session, and assume that
Figure 7: Lines intersecting incorrectly.
they have not changed. This can be a problem if a
camera stops sensing points and then flips the order it
senses them in. In practice however, these issues with
multiple points remain largely unnoticed because the
points are constantly being updated.
5 GESTURES
Our implementation of gesture recognition is de-
signed to be easily expandable. This is accomplished
by using two levels of gestures: basic gestures and
composite gestures. Basic gestures are simple mo-
tions and movements of the user’s hands that are de-
tected within our stereo-vision algorithm. We created
a gesture interface in Java that can be implemented by
any class that needs to detect these basic gestures. The
second level of gestures is composite gestures. Com-
posite gestures are combinations of basic gestures that
can be used for more complex input. These higher-
level gestures are implemented by the class that uses
our interface and are more application specific than
basic gestures.
5.1 Basic Gestures
There are two categories of basic gestures imple-
mented at this time: pinch and swipe. A pinch gesture
(Figure 8(a)) is activated when the two points seen by
the cameras move close enough together that they ap-
pear to be one point. There is also an unpinch gesture
that is activated when a pinched point separates back
into two points. An unpinch gesture can only be de-
tected after a pinch has taken place, which keeps the
cameras from falsely identifying two unrelated points
as an unpinch gesture. The other basic gesture, swipe,
is activated when the points move a set distance in any
dimension (Figure 8(b)). The movement of either one
or two points is tracked depending on how many the
TOWARDS AFFORDABLE GESTURE BASED INTERFACES
- An Exploration with Wii Remotes
227
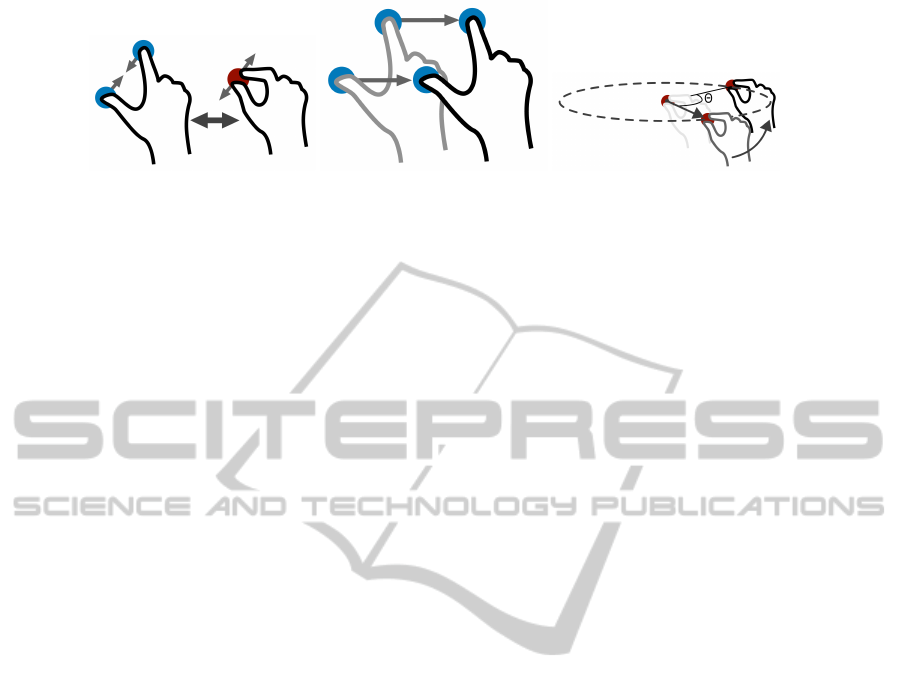
(a) Pinch. (b) Swipe. (c) Rotate.
Figure 8: Various Gestures.
cameras see. Tracking any number of points allows a
swipe to be detected regardless of the pinching state.
Swipes can be detected in both positive and negative
directions in all three dimensions for a total of six dif-
ferent swipes that can be detected and used for com-
posite gestures.
5.2 Composite Gestures
By combining the basic gestures discussed above and
the current position of the points, application specific
gestures can be created. These composite gestures can
be very simple, using just one basic gesture to acti-
vate some sort of onscreen movement, or as compli-
cated as necessary, making use of several gestures in
sequence. A rather conventional application would be
to map the movement of the points to cursor position
and the pinch/unpinch to a click. The gestures im-
plemented for Spiegel, described in detail in the fol-
lowing sections, provide an example of more complex
composite gestures.
6 NUWII AND SPIEGEL
The Spiegel framework was developed to visualize
large multidimensional astrophysical data. It is de-
signed according to the UNIX paradigm of pipes and
small utilities that do one thing and do it well (Bischof
et al., 2006). These small utilities are called ”func-
tions” by Spiegel developers. Once the Spiegel GUI is
loaded, the user chooses the functions that they want
to use from the menu and the functions appear on
screen as boxes with incoming and outgoing arrows.
For example, in order to display a set of simulation
data in 3D, the user would import five boxes - one
to import the data file from the file system, one that
extracts the stars from the data, one that converts the
star data into a format that Java3D can understand,
one that determines camera parameters, and finally a
display window for the image. Our team wrote two
new functions for Spiegel. One of these, named Wi-
imoteControl, connects the Wii Remotes to the com-
puter and interprets the data read from the Wii Re-
motes as camera coordinates. The other, 3DPointDis-
play, shows the points from the Wii Remotes in 3D
space and is used for debugging the system if prob-
lems arise.
6.1 Camera Control in Spiegel
Within Spiegel, three composite gestures were imple-
mented to control the camera position. These gestures
are used to enter different camera movement modes.
Each gesture starts with a pinch followed by a swipe.
The pinch sets a center point to be used as a reference
for movement in each camera movement mode. The
direction of the swipe determines which mode is acti-
vated. The user can easily exit each movement mode
by unpinching their fingers. Using these gestures the
user can view the simulation from any angle.
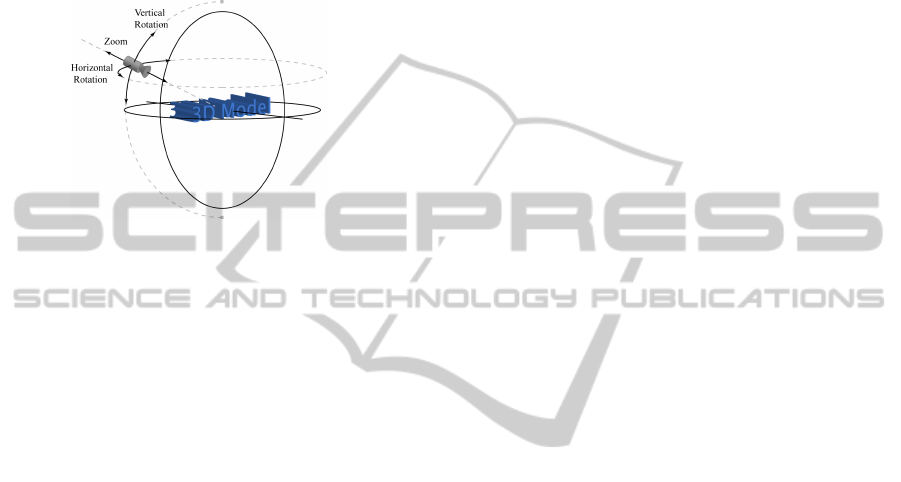
The best way for the user to remain oriented when
viewing a simulation in Spiegel is to have the camera
constantly pointing towards the origin. The simplest
way to achieve this behavior is to use a spherical co-
ordinate system for the camera position. Changes in
the inclination and azimuth angles correspond to ver-
tical and horizontal rotation respectively and chang-
ing the radial distance acts as a zooming function (see
Figure 9). In NuWii, each camera movement mode
changes the value of one of the spherical coordinates.
The three camera movement modes are horizon-
tal rotation, vertical rotation, and zoom. Horizontal
rotation is activated by pinching and swiping to the
right. To rotate the model, the user rotates the pinched
point around the reference point to move the camera
around the model (see Figure 8(c)). Swiping back-
wards (towards the user) after pinching triggers the
vertical rotation mode. After swiping, the user can
move his hand up or down to rotate the camera verti-
cally around the model. Horizontally, the camera can
be rotated around the model indefinitely, but vertical
rotation is capped at positive and negative 90 degrees.
This restriction keeps the user from moving the cam-
era over the model which would make the view up-
side-down. The zoom control is activated by pinch-
IVAPP 2011 - International Conference on Information Visualization Theory and Applications
228
ing and then swiping down. Once in the zoom mode,
the distance between the center point and the current
point is used to scale the zoom speed. If the current
point is at the center point set by the pinch, then the
camera will be stationary. When the current point is
in front of the center point, then the camera will zoom
in. Similarly, if the current point is behind the center
point, then the camera will zoom out.
Figure 9: Camera in relation to the scene.
7 CONCLUSIONS AND FUTURE
WORK
There are several possible directions for future work.
Currently, our software recognizes two basic gestures
and three composite gestures, which are identified us-
ing two points of IR input. Future contributors could
design and implement more gestures, which would
expand control over Spiegel significantly. The expan-
sion of the gesture library could be aided by track-
ing more than two points at a time. This would re-
quire more advanced trigonometry, additional Wii Re-
motes, and/or different wavelengths of IR light. Cur-
rently the Wii Remote cameras must be placed in a
close approximation to the orientation specified by
the user in software in order for the gesture recog-
nition code to work correctly. A camera calibration
method could be written, allowing the Wii Remotes
to be placed at any angle and any distance apart. Re-
search is also needed in order to quantify the differ-
ences and advantages to using a 3D gesture system
over a traditional system.
In developing our system, we experimented with
different gestures and hand motions however more
formal investigations are necessary to determine
which gestures are more natural to our users. The
NuWii system is intended to be a starting point, where
more gestures can be added to the library so that more
end user applications can be supported. While our
gestures work acceptably for the described applica-
tions, other applications will have their own needs for
specific gestures and settings.
Further research into the way that the Wii Remote
connects to the computer via Bluetooth would also
be helpful, since we noted that other Bluetooth de-
vices occasionally caused interference. Additionally,
the error in sensing the points could be reduced by
the addition of another Wii Remote placed above the
first two. This would help reduce the error in sensing
correct points as well as eliminating error when the
wrong points are matched.
In this paper we have introduced NuWii, a work-
ing gesture-based interface for the Spiegel visual-
ization framework. We have explained our track-
ing algorithm, and described the gestures that we
have implemented thus far. Our system is capable
of tracking gestures in 3D, our source code is avail-
able to the public under the GNU Public License at
nuwii.googlecode.com. The input device can be repli-
cated using less than $150 worth of hardware.
REFERENCES
Bak, A. (2004). 3d input devices for the grapecluster
project. Independent study report, Rochester Institute
of Technology.
Bischof, H.-P. (2010). The Spiegel Project. http://spiegel.cs.
rit.edu/ hpb/grapecluster/Spiegel/index.html.
Bischof, H.-P., Dale, E., and Peterson, T. (2006). Spiegel
- a visualization framework for large and small scale
systems. In Arabnia, H. R., editor, Proceedings of
the 2006 International Conference on Modeling, Sim-
ulation and Visualization Methods, pages 199–205.
CSREA Press.
Cuypers, T., Van den Eede, T., Ligot, S., and Francken, Y.
(2009). Stereowiision: Stereo vision with wiimotes.
In Proceedings of 3D Stereo MEDIA 2009.
Dehling, E. (2008). Using multiple wiimote cameras to con-
trol a game. Master’s thesis, University of Twente.
Hay, S., Newman, J., and Harle, R. (2008). Optical track-
ing using commodity hardware. In Proceedings of the
7th IEEE/ACM International Symposium on Mixed
and Augmented Reality, ISMAR ’08, pages 159–160,
Washington, DC, USA. IEEE Computer Society.
Lee, J. C. (2008). Hacking the nintendo wii remote. IEEE
Pervasive Computing, 7:39–45.
Underkoffler, J. (2010). John underkoffler points to the fu-
ture of ui. Talk at TED 2010.
Wang, D. and Huang, D. (2008). Low-cost motion captur-
ing using nintendo wii remote controllers. Csc2228
project report, University of Toronto, Toronto, Ontario
M5S 3G4.
Wang, R. Y. and Popovi
´
c, J. (2009). Real-time hand-
tracking with a color glove. In SIGGRAPH ’09: ACM
SIGGRAPH 2009 papers, pages 1–8, New York, NY,
USA. ACM.
Wii Brew, C. (2010). Wiimote. http://wiibrew.org/wiki/
Wiimote.
TOWARDS AFFORDABLE GESTURE BASED INTERFACES
- An Exploration with Wii Remotes
229
