
PERSPECTIVE-THREE-POINT (P3P) BY DETERMINING
THE SUPPORT PLANE
Zhaozheng Hu
Graduate School of Informatics, Kyoto University, Kyoto 606-8501, Japan
College of Information Science and Technology, Dalian Maritime University, Dalian 116026, China
Takashi Matsuyama
Graduate School of Informatics, Kyoto University, Kyoto 606-8501, Japan
Keywords: Perspective-Three-Point (P3P), Support plane, Plane normal, Maximum likelihood.
Abstract: This paper presents a new approach to solve the classic perspective-three-point (P3P) problem. The basic
conception behind is to determine the support plane, which is defined by the three control points.
Computation of the plane normal is formulated as searching for the maximum likelihood on the Gaussian
hemisphere by exploiting the geometric constraints of three known angles and length ratios from the control
points. The distances of the control points are then computed from the normal and the calibration matrix by
homography decomposition. The proposed algorithm has been tested with real image data. The computation
errors for the plane normal and the distances are less than 0.35 degrees, and 0.8cm, respectively, within
1~2m camera-to-plane distances. The multiple solutions to P3P problem are also illustrated.
1 INTRODUCTION
Perspective-n-Point (PnP) is a classic problem in
computer vision field and has important applications
in vision based localization, object pose estimation,
and metrology, etc (Fischler et al., 1981, Gao et al.,
2003, Moreno-Noguer et al., 2007, Vigueras et al.,
2009, Wolfe et al., 1991, Wu et al., 2006, and
Zhang, et al., 2006). The task of PnP is to determine
the distances between camera and a number of
points (n control points), which are well known in an
object coordinate space, from the image, that is
taken by a calibrated camera. Existing PnP
researches mainly focused on n=3, 4, 5 cases, also
known as P3P, P4P, and P5P problems. Among
them, P3P (n=3) problem requires the least
geometric constraints and it is also the minimum
point subset that yield finite solutions. Existing P3P
researches can be classified into two categories.
Researches in the first category try to solve P3P
using different approaches, such as algebraic,
geometric approaches, etc (Fischler et al., 1981,
Moreno-Noguer et al., 2007, Vigueras et al., 2009,
and Wolfe et al., 1991). Researches in the second
one try to classify the solutions and study the
distribution of multiple solutions (Fischler et al.,
1981, Gao et al., 2003, Wolfe et al, 1991, Wu et al.,
2006, and Zhang, et al., 2006). The P3P problem
was first proposed in (Fischler et al., 1981), which
proves that P3P has at most four positive solutions.
Wolfe et al. gave geometric explanation of P3P
solution distribution and showed that most of the
time P3P problem gives two solutions (Wolfe et al,
1991). Gao et al. gave a complete solution set of the
P3P problem (Gao et al., 2003). More work on P3P
and on the general PnP problems can be found in the
literatures (Moreno-Noguer et al., 2007, Vigueras et
al., 2009, Wu et al., 2006, and Zhang, et al., 2006).
The work in the paper falls into the first
category, which tries to address P3P by determining
the support plane. We show that the key to P3P
problem is to compute the plane normal.
Computation of plane normal is formulated as a
maximum likelihood problem from the geometric
constraints of three control points so that the normal
is computed by searching for the maximum
likelihood on the Gaussian hemisphere. Once the
normal is calculated, we can determine the support
plane, compute the distances of the control points to
the camera, and solve the P3P problem.
119
Hu Z. and Matsuyama T..
PERSPECTIVE-THREE-POINT (P3P) BY DETERMINING THE SUPPORT PLANE.
DOI: 10.5220/0003320301190124
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 119-124
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

2 PLANE RECTIFICATION
FROM HOMOGRAPHY
Under a pin-hole camera model, a 3D point with the
homogeneous coordinates
[]
T
ZYXM 1=
is
projected onto an image plane, with the image
[]
T
vum 1=
given by the following imaging
process (Hartley & Zisserman, 2000)
[][][ ]
TT
ZYXtRKvu 11 ×≅
(1)
where
≅
means equal up to a scale,
K
is the
calibration matrix,
R
and
t
are the rotation matrix
and the translation vector, respectively.
Assume a reference plane coincides with the X-
O-Y plane (
0=Z ) of the world coordinate system.
We can derive the relationship between a 2D point
[]
T
YXM 1=
on the plane
and its image
m
from Eq. (1) as follows (Zhang, 2000)
[]
[
]
T
H
YXtrrKm 1
21
×≅
(2)
where
i
r
is the i
th
column of the rotation matrix.
Hence,
M
and
m
are related by a 3×3 matrix,
called homography. It is possible to compute the
homography from the vanishing line or plane
normal, and the camera calibration matrix, according
to the stratified reconstruction theory. The
computation details are referred to (Hartley &
Zisserman, 2000, Liebowitz & Zisserman, 1998).
Once the homography is determined, we can use
it to rectify the physical coordinates of points on the
reference plane from Eq. (2) as follows
mHM
1−
≅
(3)
Once the coordinates are rectified from Eq. (3),
more planar geometric attributes can computed, such
as distance, length ratio, angle, shape area,
curvature, etc. These computed geometric attributes
are defined as rectified geometric attributes.
3 THE PROPOSED ALGORITHM
3.1 P3P from Support Plane
The formulation of P3P problem is referred to
(Fischler et al., 1981, and Wolfe et al., 1991), which
states that “given the camera calibration matrix, the
relative positions of three points, also called control
points, and the images of the control points on the
imaging plane, compute the distance of each control
point to the camera center”.
The three control points define an unique support
plane. If the plane is well determined, e.g., the
normal and the distance, we can compute its
intersections with the re-projection rays, which can
be computed from the images of the control points
and calibration matrix. Hence, the 3D coordinates of
the intersections (also control points) are determined
readily, and the distances are thereafter computed.
According to stratified reconstruction theories, the
key to determine a plane is the normal (Hartley &
Zisserman, 2000, Liebowitz & Zisserman, 1998).
Once the plane normal is calculated, a metric
reconstruction of a plane is ready by using the
calibration matrix (Hartley & Zisserman, 2000, and
Liebowitz & Zisserman, 1998). An actual distance
e.g., distance between two arbitrary control points,
can upgrade a metric reconstruction to Euclidean
one. As a result, the distance of the plane is
computed readily. Therefore, the key to P3P is to
compute the normal of the support plane.
3.2 Plane Normal Computation
3.2.1 Basic Geometric Constraints from
Three Control Points
Let
321
,, PPP
be the three control points, from
which, we can compute three lengths in-between as
213
312
321
PPD
PPD
PPD
−=
−=
−=
(4)
where
•
is Euclidean distance operator. Hence,
three length ratios can be derived as
213
312
321
/
/
/
DD
DD
DD
=
=
=
λ
λ
λ
(5)
We can also compute three angles from the
triangle defined by the three points as
(
)
(
)
(
)
()
()
()
()
()
()
21
2
3
2
2
2
13
31
2
2
2
3
2
12
32
2
1
2
3
2
21
2/cos
2/cos
2/cos
DDDDD
DDDDD
DDDDD
××−+=
××−+=
××−+=
θ
θ
θ
(6)
From Eq. (5) and Eq. (6), we can derive six
geometric constraints
(
)
6,2,1 "=iC
i
on the plane
normal from the three control points as follow
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
120

(){}()
6,2,1| "=== iuNSCC
iii
(7)
where
i
u
is the geometric attribute of the i
th
constraint, e.g., the value of
i
λ
or
i
θ
, as specified
in Eq. (5) and Eq. (6), and
()
NS
i
is the rectified
geometric attribute, which can be computed from
homography, given the plane normal.
3.2.2 Maximum Likelihood Model
We try to compute the plane normal from the six
geometric constraints, as specified in Eq. (7) above.
This can be formulated as to maximize the following
conditional probability (Hu & Matsuyama, 2010),
which is given as follows
()
621
,,|maxarg CCCNP
N
"
(8)
where
N is the plane normal to compute.
Therefore, Eq. (8) tries to compute the plane normal
with the highest probability, given the six geometric
constraints from the control points. Actually, it is
difficult to solve Eq. (8) directly. By using Bayes’
rule, we can re-arrange Eq. (8) as
()
()()
()
621
621
621
,,
|,,
,,|
CCCP
NPNCCCP
CCCNP
"
"
"
=
(9)
where
()
NCCCP |,,
611
"
is known as the
likelihood,
()
NP
and
()
621
,, CCCP "
are the prior
probabilities for the plane normal directions and
geometric constraints, respectively. Assume that the
six geometric constraints
()
6,2,1 "=iC
i
are
independent to each other and the plane normal
directions are uniformly distributed on the Gaussian
sphere. Hence, we can derive from Eq. (9)
()()
∏
=
∝
6
1
621
|,,|
i
i
NCPCCCNP "
(10)
Hence, Eq. (10) shows that solving Eq. (8) is
equivalent to compute the maximum likelihood. In
other words, the solution to the normal of the
support plane is the one, which yields the maximum
likelihood in Eq. (10).
We define
()
NCP
i
|
in Eq. (10) as the likelihood
or probability that the i
th
constraint is satisfied, given
the plane normal. It is reasonable to assume that the
likelihood depends on the rectification distortion.
And for the i
th
geometric constraint, the rectification
distortion is defined as the difference between
()
NS
i
and
i
u
as follows
(
)
(
)
iii
uNSND −
=
(11)
The following rules are developed for the
likelihood model: 1) the maximum likelihood should
be obtained, where the rectification distortion is
totally removed (
(
)
0=ND
i
); 2) more absolute
distortion leads to less likelihood; 3) constraints
should contribute equally to solve Eq. (10), if no
special weights are assigned; 4) normalization is
required, since geometric attributes may be in
different scales or units.
Based on the above rules, we proposed using a
normalized Gaussian function with unit standard
deviation to model the likelihood, which is given in
the following form (Hu & Matsuyama, 2010)
()
()
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−∝ 2/exp|
2
i
ii
i
u
uNS
NCP
(12)
3.2.3 Searching for Plane Normal on
Gaussian Hemisphere
Substitution Eq. (12) into Eq. (10) yields
()
()
∏
=
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−∝
6
1
2
621
2/exp,,|
i
i
i
u
ND
CCCNP "
(13)
A searching approach is proposed in order to
solve Eq. (13). Actually, Gaussian sphere surface
defines the searching space of the plane normal
directions. In practice, we can search on Gaussian
hemisphere instead of Gaussian sphere, since all
visible planes are in the front of the camera. Once
the searching space is defined, we can partition the
Gaussian hemisphere into a number of patches, with
each patch representing a sampled normal. And the
likelihood for each sampled normal is computed by
using Eq. (13), based on the basic geometric
constraints, as specified in Eq. (7). The maximum
likelihood is thereafter computed by sorting. And the
corresponding normal is the final normal that we
derive. In the case that a given P3P has multiple
solutions, we need to find multiple local maxima to
yield the multiple solutions to the support plane
normal on the likelihood map. This will be
illustrated in the experiment part.
3.3 Distance Computation from
Homography
Once we compute the plane normal, we can derive
the homography between the support plane and its
image by using the calibration matrix, according to
PERSPECTIVE-THREE-POINT (P3P) BY DETERMINING THE SUPPORT PLANE
121
the stratified reconstruction theories (Hartley &
Zisserman, 2000, Liebowitz & Zisserman, 1998).
Note that the plane normal and camera calibration
matrix only allow the distances recovered up to a
common scale (a metric reconstruction of the plane).
In order to determine such scale factor, we need to
know one actual length as the reference. For a P3P
problem, the reference length can be derived from
the distance of two arbitrary control points.
With the computed homography and camera
calibration matrix, the camera exterior parameters,
including the rotation matrix and translation vector
can be recovered by decomposition as follows
()
⎪
⎪
⎩
⎪
⎪
⎨
⎧
==
⊗=
==
−−−−
−−
2
1
3
1
1
1
3
1
213
11
//
2,1/
hKhKhKhKt
rrr
ihKhKr
iii
(14)
where
⊗
is the cross product operator, and
i
h
is
the i
th
column vector of the homography. More
details regarding camera/object pose computation
using Eq. (14) can be referred to the literatures
(Liebowitz & Zisserman, 1998, and Zhang, 2000).
As a result, the 3D coordinates of the control point
on the support plane in the camera coordinate
system can be computed from the calculated rotation
matrix and translation vector by using coordinate
system transformation. Thereby, the distances of the
control point to the camera are readily computed
from the recovered 3D coordinates. Finally, the P3P
problem is solved.
4 EXPERIMENTAL RESULTS
The proposed algorithm was tested with the actual
image data. One issue for real image experiments is
that the ground truth data, such as the normal of the
support plane, the distances of the control points, is
difficult to obtain. To overcome this problem, we
carefully designed the experiment and used the
chessboard pattern in the experiment, which is also
used by Zhang’s calibration algorithm (Zhang,
2000). As can be observed in Figure 1 below, four
images of the chessboard pattern were taken by a
Nikon COOL-PIX 4100 digital camera in an indoor
office. All the images have the resolution of
1600×1200 (in pixel). From each image, we can
extract 48 (6 rows×8 columns) corner points from
the grids. For the four images in the tests, the camera
was placed at different positions with different
orientations so as to make the proposed algorithm
work in different situations.
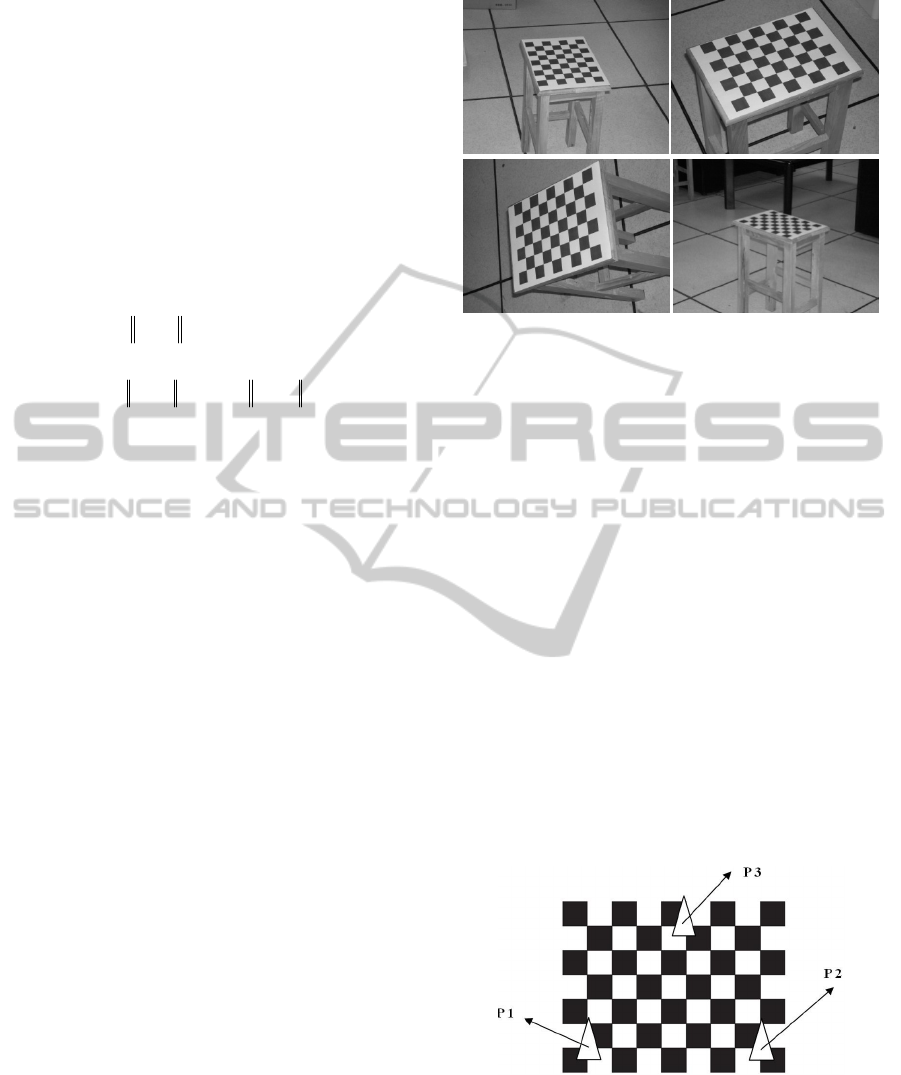
Figure 1: Images of chessboard pattern, from upper left to
lower right numbered 1,2,3,4.
Afterwards, the camera was calibrated from the
chessboard images (Zhang, 2000). As a result, both
the camera intrinsic and exterior parameters,
including the rotation matrix and translation vector,
were calculated. In the experiment, the camera
calibration matrix was calculated as follows
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
100
8.6762.41690
1.87405.4175
K
From the computed camera exterior parameters,
we calculate the normal of chessboard plane in the
camera coordinate system from each image, which is
the third column vector of the rotation matrix. The
3D coordinates of the control points were computed
from the rotation matrix and the translation vector,
from which the distances were calculated. They
were then acted as the ground truth data to validate
the proposed algorithm.
Figure 2: Three control points selected from the grids of
the chessboard pattern.
Three control points (see the points marked by
triangles and numbered P1, P2, and P3 in Figure 2)
were chosen from a number of forty-eight (6 rows×8
columns) corner points on the chessboard. Hence,
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
122

the support plane coincides with the chessboard
plane. From the three control points, we derived
three length ratios and three known angles using Eq.
(4)~Eq. (6), which were then acted as the basic
geometric constraints to compute the plane normal
from each of the chessboard pattern image by using
the proposed algorithm. In the experiment, we
partitioned the Gaussian hemisphere into 400×200
cells for the searching algorithm, with each cell
representing a unit normal.
Table 1: Computation results for the normal of the support
plane (chessboard plane).
Computed Normal Actual Normal
Err
(in
0
)
Img1
0.078 -0.823 -0.562 0.076 -0.825 -0.560 0.20
Img2
0.034 -0.634 -0.773 0.030 -0.631 -0.776 0.33
Img3
-0.700 -0.134 -0.701 -0.697 -0.133 -0.705 0.26
Img4
0.029 -0.935 -0.354 0.027 -0.934 -0.356 0.20
Table 1 above presents the normal computation
results, where the second column is for computed
normal with the proposed algorithm, and the third
for the actual normal, or the ground truth normal
from the camera calibration results. The angle
between the estimated and actual normal reflect the
computation errors, which are represented in the
fourth column (unit in degree). It can be observed
that all error angles are less than 0.35 degrees, which
show that the proposed algorithm is accurate.
Afterwards, distances of the three control points
to the camera center were computed by homography
decomposition based on the calculated normal. The
results are presented in Table 2 below. Also, the
ground truth distances were derived from the camera
calibration results, to which the computed distances
were compared. As can be observed in Table 2,
()
3,2,1
~
=iP
i
is the computed Euclidean distance of
the i
th
control point to the camera, with the proposed
algorithm, while
()
3,2,1=iP
i
for the ground truth
distance. The Euclidean distance between them,
()
3,2,1
~
=− iPP
ii
, defines the computation error. As
shown in Table 2, the distance computation errors
are very small. For example, for all the four images,
the computation errors for all the three points are
less than 0.8cm, and the average computation error
is 0.41 cm, within about 1.0~2.0m camera-to-plane
distances. The results demonstrate that the algorithm
is accurate and practical.
Table 2: Computed distances between the control points
and the camera (unit in cm).
Img1 Img2 Img3 Img4
1
~
P
164.3 109.3 114.0 199.8
1
P
163.6 109.0 114.5 199.9
Err
0.7 0.3 0.5 0.1
2
~
P
160.6 120.4 113.1 204.7
2
P
159.8 120.2 113.6 204.6
Err
0.8 0.2 0.6 0.1
3
~
P
176.6 114.8 126.1 216.9
3
P
175.8 114.5 126.5 216.9
Err
0.8 0.3 0.5 0
The multiple solutions of P3P problem was also
studied and illustrated with the proposed algorithm,
which is shown in Figure 3. Actually, multiple
solutions to P3P correspond to multiple support
planes. If a P3P problem has multiple solutions, the
algorithm may find a solution that is different from
the ground truth normal, because it only searches for
the maximum likelihood. As shown in Figure 3, the
likelihood map was generated by computing the
likelihood for each sampled normal on Gaussian
hemisphere using Eq. (13). In the likelihood map,
the image intensity represents the likelihood, with
darker intensity representing higher likelihood. And
the maximum likelihood was then searched
throughout the likelihood map, with the computed
plane normal
[
]
T
454.0888.0070.0 −−
. The
corresponding position in the likelihood map is
marked by a diamond (
◇
) (see Figure 3(b)). And the
actual normal, also the ground truth normal is
[
]
T
590.0802.0092.0 −−
, with the position in
the likelihood map marked by a cross (+) (see Figure
3(b)). Figure 3(c) shows the positions of thirty
normal directions, which yield the highest
likelihoods. They are located in two different areas,
with two local maxima in the likelihood map (see
Figure 3(c)), which means that it has two solutions
to the given P3P problem. The calculated normal is
located in the right part, while the actual normal in
the left (see Figure 3(c)). This is consistent with the
conclusion that P3P gives two solutions most of the
time (Wolfe et al., 1991). The results clearly
demonstrate that the proposed algorithm can be used
to study and classify the multiple solutions (two
solutions in this case) to P3P problem.
PERSPECTIVE-THREE-POINT (P3P) BY DETERMINING THE SUPPORT PLANE
123

Figure 3: Illustration of two solutions to P3P: a) Left:
Original image; b) Upper right: likelihood map with
positions of the actual and computed normal marked by +
and ◇, respectively; c) Lower right: positions of the 30
normal directions with the highest likelihoods.
5 CONCLUSIONS
This paper has presented a new algorithm to solve
P3P problem by determining the support plane.
Plane normal computation is formulated as finding
the maximum likelihood on Gaussian hemisphere.
With the determined support plane, the P3P problem
can be solved by homography decomposition. The
algorithm has been tested by using actual images
with good results for plane normal and for distance
computation reported. It was also applied to study
and classify the multiple solutions to P3P problem.
This algorithm not only suggests a new approach to
P3P but also complements existing P3P researches.
Moreover, the proposed model is expected to help
solve other PnP (n=4, 5) problems and classify the
multiple solutions.
ACKNOWLEDGEMENTS
The work presented in this paper was sponsored by a
research grant from the Grant-In-Aid Scientific
Research Project (No. P10049) of the Japan Society
for the Promotion of Science (JSPS), Japan, and a
research grant (No. L2010060) of the Department of
Education, Liaoning Province, China.
REFERENCES
Fischler, M., and Bolles, R. (1981). Random sample
consensus, Communications of the ACM, Vol. 24, No.
6, pp.381-395
Gao, X., Hou, X., Tang, J., Cheng, H. (2003). Complete
solution classification for the perspective-three-point
problem, IEEE Transaction on Pattern Analysis and
Machine Intelligence, Vol. 25, No. 8, pp. 930-943
Hartley, R., and Zisserman, A. (2000). Multiple view
geometry in computer vision, Cambridge, UK:
Cambridge University Press, 2nd Edition.
Hu, Z., and Matsuyama, T. (2010). A generalized
computation model for plane normal recovery by
searching on Gaussian hemisphere, the Third
International Conference on Computer and Electricity
(ICCEE 2010), pp.145-149
Liebowitz, D., and Zisserman, A. (1998). Metric
rectification for perspective images of planes,
Proceedings of the IEEE Conference on Computer
Vision and Pattern Recognition, pp.482-488
Moreno-Noguer, F., Lepetit, V., and Fua, P. (2007).
Accurate non-iterative O(n) solution to the PnP
problem. IEEE 11th International Conference on
Computer Vision, pp. 1–8
Vigueras, F., Hern´andez, A., and Maldonado, I. (2009).
Iterative linear solution of the perspective-n-point
problem using unbiased statistics, Eighth Mexican
International Conference on Artificial Intelligence,
Guanajuato, Mexico, pp.59-64
Wolfe, W., Mathis, D., Sklair, C., Magee, M. (1991). The
perspective view of 3 Points, IEEE Transaction on
Pattern Analysis and Machine Intelligence, Vol. 13,
No. 1, pp.66-73
Wu, Y., Hu, Z. (2006). PnP problem revisited. Journal of
Mathematical Imaging and Vision, Vol. 24, No. 1, pp.
131-141
Zhang, C., Hu, Z. (2006). Why is the danger cylinder
dangerous in the P3P problem? Acta Automatiica
Sinica, Vol. 32, No. 4, pp.504-511
Zhang, Z. (2000). A flexible new technique for camera
calibration, IEEE Transaction on Pattern Analysis and
Machine Intelligence, Vol.22, No. 11, pp.1330-1334
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
124
