
A COMPARATIVE STUDY OF THE MARCHING CUBES
TECHNIQUES FOR 3D REAL-TIME RENDERING OF SCENES
IN VIDEOCONFERENCING SYSTEMS
Maria
´
Angeles Calabuig, Mois
´
es Ferrer, Mariano Alca
˜
niz, Juan Jos
´
e Fuertes
Instituto Interuniversitario de Investigaci
´
on en Bioingenier
´
ıa y Tecnolog
´
ıa Orientada al Ser Humano
Universidad Polit
´
ecnica de Valencia, Camino de Vera s/n, 46022 Valencia, Spain
Mariano Alca
˜
niz
Ciber, Fisiopatolog
´
ıa Obesidad y Nutrici
´
on, CB06/03 Instituto de Salud Carlos III, Madrid, Spain
Keywords:
3D Immersive videoconferencing, Scene reconstruction, Model rendering, Marching Cubes.
Abstract:
This paper presents a comparative study of the Marching Cubes techniques and describes their optimised
implementations for a 3D videoconferencing system with the aim of obtaining maximum efficiency and flexi-
bility. Different approaches in the CPU and in the GPU are compared in order to analyze the influence of the
rendering process in the reconstruction algorithm. To do this, several 3D scenes were captured, codified and
sent to a real-time rendering system that reconstructs 3D models at high speed.
1 INTRODUCTION
Videoconferencing systems are becaming highly pop-
ular communication tools that are used in different
contexts (Kauff and Schreer, 2002; Regenbrecht et al.,
2003; Chu et al., 2009); however, they do not use the
same rendering methods (Pierleoni et al., 2006; Weik
et al., 1998; Riegel and Kaup, 1997). Rendering, an
important part of these systems, is the process of gen-
erating an image from a 3D model, a scene or a vol-
ume of voxels, by means of computer programs.
One of the most popular techniques for render-
ing tasks of 3D real-time reconstruction techniques
is the Marching Cubes algorithm (Newman and Yi,
2006), that it has been used and improved for quite
a while, such as the GPU version created by Christo-
pher (Dyken et al., 2008) which is known as Histopy-
ramids. Marching Cubes implementations have been
used in biomedicine, processing, and natural phenom-
ena rendering. However, to the authors’ knowledge,
there is no work about computer graphics in multiuser
videoconferencing systems.
The aim of this paper is to present a comparative
study of different algorithms for 3D real-time recon-
struction that are used in a high immersive videocon-
ferencing system developed in the VISION project.
In section 2, an overview of the system is presented,
including the reconstruction module. Section 3 de-
scribes the different implementations of the Marching
Cubes algorithm with special emphasis on innovative
contributions. In section 4, we present a comparative
study of the experimental results about the influence
of the rendering process on the different implementa-
tions inside a real videoconferencing system. Finally,
section 5 summarizes the conclusions of the work.
2 SYSTEM OVERVIEW
The architecture of the system is composed of sev-
eral modules (capture, coding, communication, re-
construction, and presentation), from the user who is
captured at one end of the system to the end user who
receives a visualization of the first user after being re-
constructed in real time (see Fig. 1).
Figure 1: The system block diagram.
2.1 Inputs of 3D Reconstruction
Multi-camera technology is used to capture 3D
scenes. In a smart room, eighteen cameras are syn-
203
Ángeles Calabuig M., Ferrer M., Alcañiz M. and José Fuertes J..
A COMPARATIVE STUDY OF THE MARCHING CUBES TECHNIQUES FOR 3D REAL-TIME RENDERING OF SCENES IN VIDEOCONFERENCING
SYSTEMS.
DOI: 10.5220/0003320102030206
In Proceedings of the International Conference on Computer Graphics Theory and Applications (GRAPP-2011), pages 203-206
ISBN: 978-989-8425-45-4
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

chronized and calibrated spatially to register the 3D
sensor data in the same world coordinate frame. The
capture module uses the cameras’ data to obtain the
volume of voxels which is the input to the Marching
Cubes algorithm. The data acquired by the cameras
are also the texture inputs to the reconstruction sys-
tem that comprise the Marching Cubes algorithms for
mesh generation and the render block.
2.2 Render Block
The render block receives meshes, which are the re-
sult of the Marching Cubes algorithm. It also receives
the calibration file that is sent from the capture mod-
ule to find correspondences among the cameras of the
capture module and the reconstruction module. Fi-
nally, it receives the textures from the demultiplexer
device that selects the textures for each frame.
The eighteen cameras are available in the render
block but 4 of them are only used in texture map-
ping. The best 4 views are updated and chosen in
each frame by the demultiplexer among the 18 avail-
able views.
Figure 2: Volume texturization from the best 4 views.
3 MARCHING CUBES
Marching Cubes (MC) is a simple method for extract-
ing isosurfaces (Lorensen and Cline, 1987). For every
position in the voxel volume, neighbouring voxels are
checked to determine whether they are inside the vol-
ume. Then an identifier is acquired, a lookup table is
checked, and the extracted triangles are obtained. The
chosen look-up table does not introduce ambiguities
(which would yield to topology errors in the mesh)
at the expenses of generating 5 triangles at most per
voxel (Magnor, 2005).
The extraction of triangles is always performed lo-
cally. By running over the entire volume, all the tri-
angles are obtained and combined to form the final
mesh. This locality is exploited to boost performance
by parallel programming techniques. In this work,
several versions for the reconstruction algorithm have
been implemented, by the Central Processing Unit
(CPU) and the Graphics Processing Unit (GPU) (see
Fig. 3).
Figure 3: Output of the Marching Cubes algorithm.
A 3D real-time reconstruction based on different MC
implementations in the CPU or the GPU is performed
to adapt to the requirements of the system. Initially,
each version has to allocate memory for the buffers
that are used in the application. Then new voxels are
obtained, and a new mesh is calculated in each itera-
tion by the MC method.
3.1 CPU-based Implementations
For comparison purposes, a monothread version was
implemented. Several memory usage tests were per-
formed to provide an efficient solution, and a large
block of contiguous memory was used.
3.1.1 Multithreading
Two different multithreading versions were imple-
mented in this system. In order to deal properly with
the data the volume was divided into layers that were
grouped into clusters. The cluster size was defined as
the number of contiguous layers to process per thread.
In the first multithread version the number of
threads is the same as the number of clusters; there-
fore the number of threads depends on the cluster size.
The higher the number of threads is, the higher the
cost to keep them. Therefore an optimum value must
be determined by experimentation.
In the second multithread version, the number of
threads coincides with the number of processor cores
at most. Each thread requests a new cluster to process
if it is free, until the whole volume is processed. This
request for new clusters is centralized and synchro-
nized to ensure that only one thread requests a cluster
at the same time. This implementation not only per-
forms better than the before one, but also doesn’t need
any tweaking.
3.2 GPU-based Implementations
Different implementations have been carried out; one
on Compute Unified Device Architecture (CUDA),
based on Nvidia’s version (Nvidia, 2008; Harris
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
204
et al., 2007); and other in OpenGL Shading Language
(GLSL), based on Christopher’s version (Dyken et al.,
2008) which is known as Histopyramids. In both
cases, lookup-tables are processed as textures, and
their main operations (compression/expansion) can be
parallelized and optimized for GPU.
In the 2D Histopyramids version, first the input
data are compressed to generate histopyramids (or
pyramids of data structures). With each compression
operation, a new level of the pyramid is created by
accumulating four elements of the previous level in
just one. Finally, the top level will hold the number of
output elements. Then the output data are expanded
to obtain the resulting elements.
The CUDA implementation classifies the voxels
with the MC identifier, and the number of generated
triangles is obtained. Then, the information is com-
pressed using the scan technique, and the triangles are
generated in an expansion operation.
4 COMPARATIVE RESULTS
Several time measurements were carried out to ob-
tain a precise comparison of the different MC im-
plementations. It was not difficult to compare the
CPU versions because the times of the MC algorithm
can be calculated isolatedly. Since the MC algorithm
cannot be measured isolatedly in one of the GPU
versions (histopyramids) we calculated the Marching
Cubes algorithm together with the normals and the
data sending to the GPU in order to compare equiva-
lent processes in the CPU and the GPU. These mea-
surements were obtained by averaging the time of
50 iterations to obtain more accurate estimates. We
also calculated the algorithms on a normal run of the
pipeline (i.e. there were no iterations, just the pro-
cesses followed by the rendering tasks as occurs in
the usual process of the videoconference system).
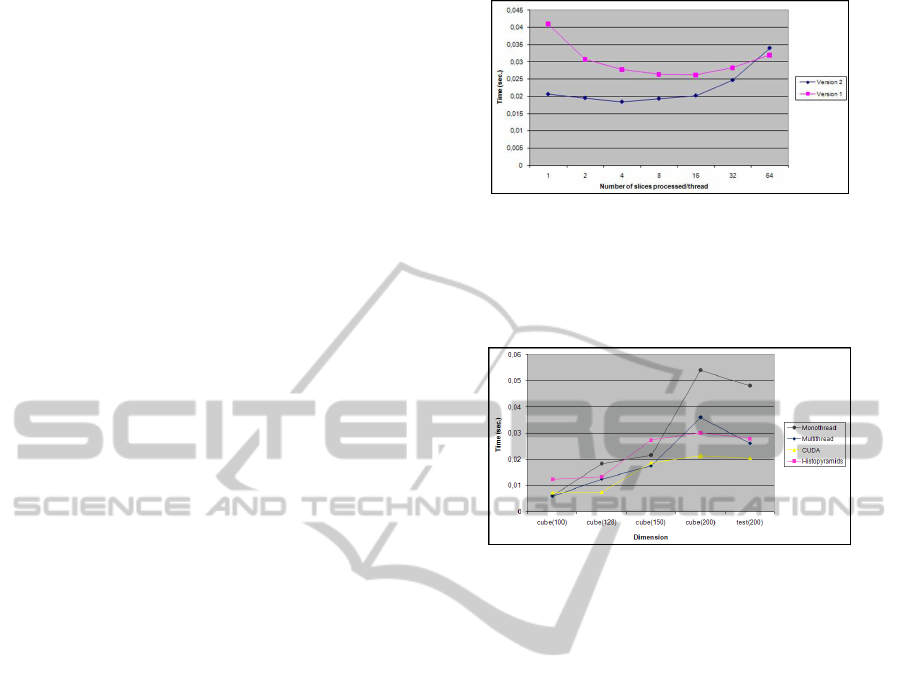
4.1 Multithread Versions
The comparison of 2 multithread versions was per-
formed. As Fig. 4 shows, version 1 was more unsta-
ble than version 2 and required finer tuning because it
was more static.
Version 1 is slower because it requires more
threads, changes the context frequently, and the work
is not distributed equally (static option). Thus, if a
thread ends soon, it cannot help others and the opti-
mum time results are not reached. Version 2, a dy-
namic version, charges the system less than a static
one because the same work requires a lower number
of threads to be processed.
Figure 4: Multithread versions.
When comparing the most efficient multithread and
monothread versions using four cores, the multithread
version performs 2.8 times faster as Fig. 5 shows.
Figure 5: Multithread vs GPU versions.
4.2 Multithread vs. GPU Versions
In this section, the most efficient multithread version
is compared with the 2 versions implemented in GPU.
Fig. 5 presents a breakdown of the two GPU ver-
sions in power of 2 values. This is because the GPU
algorithms operate on textures or data structures that
are power of 2. Therefore, the processing of data,
whose size is ”N”, is similar to the processing of ”M”,
where ”M” is the power of 2 immediately above ”N”.
The computational cost of ”N” is shown in the expres-
sion ( 1) (assuming dimensions of similar size), where
”N” is the number of elements of the maximum di-
mension and ”x” is an integer.
O
(N
3
)
≈ O
(M
3
)
/2
x−1
< N ≤ M,M = 2
x
(1)
This expression explains why the GPU versions
are more stable than the multithread version. The
GPU computational cost is similar between a power
of 2 and the following power of 2 and the multithread
version increases cubically.
4.3 Real Pipeline Profiling and the
Influence of the Rendering Process
The run time of the most efficient multithread version
and the GPU versions on a normal run of the pipeline
was calculated, and the results are shown in Fig. 5.
A COMPARATIVE STUDY OF THE MARCHING CUBES TECHNIQUES FOR 3D REAL-TIME RENDERING OF
SCENES IN VIDEOCONFERENCING SYSTEMS
205

Figure 6: Multithread vs GPU versions in real pipeline.
As Fig. 6 shows, the times of the 3 versions in the
normal running of the pipeline are different from the
time average. Also, there is a shift in the times, which
is sharper in the GPU versions. The reason is that the
GPU is already saturated with the calculations of the
MC and the normals and the rendering of the scene
and calculation of occlusion textures. However the
CPU has the same work load in the whole pipeline
than in the isolated one, so there is no significant time
shift in the multithread version. The most effective
algorithm in the current system is the CPU based one.
The rendering system was calculated to adapt it
to the load of the videoconferencing system and the
available resources. In this way, an acceptable frame
rate for a videoconference (always over 15 frames)
was guaranteed. Exchangeable implementations were
developed (using CPU-GPU) for that purpose.
4.4 Hardware Setup
The desktop where all these time results were calcu-
lated had the following characteristics: a PC with a
NVIDIA Geforce 280 GTX graphics card; an Intel
Core 2 Quad Q9550 CPU clocked at 2.66 GHz; and
3.25 Gb RAM of a 4.028 Mb system were usable be-
cause of the operative system used.
5 CONCLUSIONS
This comparative study about MC implementations
shows how the rendering process influences the
videoconferencing system. Moreover, since the algo-
rithms implemented in a CPU are also performed on
a GPU, the final results show how the algorithms are
different in terms of efficiency. The performance of
each option depends on the system loads, and, specif-
ically, whether or not the CPU or the GPU is more
or less saturated. To avoid a significant decline in the
real-time frame rate and in the user’s sense of immer-
sion in the virtual environment, it is important not to
forget that the GPU is used to represent virtual envi-
ronments and the consumption of resources depends
on the detail needed, as we have shown in this work.
ACKNOWLEDGEMENTS
This work has been partially supported by the Span-
ish Administration agency CDTI under the VISION
project of the CENIT programme and by Ministerio
de Educaci
´
on y Ciencia of Spain. The authors are
very grateful to all the partners of this project, espe-
cially to Telefonica I+D for coordinating the project.
REFERENCES
Chu, R., Tenedorio, D., Schulze, J., Kuwabara, S.,
Nakazawa, A., Takemura, H., and Lin, F. (2009). Op-
timized Rendering for a Three-Dimensional Video-
conferencing System. In eScience, 2008. eScience’08.
IEEE Fourth International Conference on, pages 540–
546. IEEE.
Dyken, C., Ziegler, G., Theobalt, C., and Seidel, H.-P.
(2008). High-speed marching cubes using histopyra-
mids. Comput. Graph. Forum, 27(8):2028–2039.
Harris, M., Sengupta, S., and Owens, J. (2007). Parallel pre-
fix sum (scan) with CUDA. GPU Gems, 3(39):851–
876.
Kauff, P. and Schreer, O. (2002). An immersive 3D video-
conferencing system using shared virtual team user
environments. In Broll, W., Greenhalgh, C., and
Churchill, E. F., editors, CVE, pages 105–112. ACM.
Lorensen, W. E. and Cline, H. E. (1987). Marching cubes:
A high resolution 3d surface construction algorithm.
In SIGGRAPH ’87: Proceedings of the 14th an-
nual conference on Computer graphics and interac-
tive techniques, pages 163–169, New York, NY, USA.
ACM.
Magnor, M. A. (2005). Video-Based Rendering. Ed. Sales
and Customer Service Office.
Newman, T. and Yi, H. (2006). A survey of the marching
cubes algorithm. Computers & Graphics, 30(5):854–
879.
Nvidia (2008). NVIDIA CUDA Compute Unified Device Ar-
chitecture: Programming Guide, version 2.0 edition.
Pierleoni, P., Fioretti, F., Cancellieri, G., Di Biase, T.,
Pasqualini, S., and Nicolini, F. (2006). Audio Render-
ing System For Multimedia Applications. Distributed
Cooperative Laboratories: Networking, Instrumenta-
tion, and Measurements, page 61.
Regenbrecht, H., Ott, C., Wagner, M., Lum, T., Kohler, P.,
Wilke, W., and Mueller, E. (2003). An augmented vir-
tuality approach to 3D videoconferencing. In ISMAR,
pages 290–291. IEEE Computer Society.
Riegel, T. and Kaup, A. (1997). Shape initialization of 3D
objects in videoconference scenes. In Proceedings of
SPIE, volume 3012, page 116.
Weik, S., Wingbermuhle, J., and Niem, W. (1998). Auto-
matic creation of flexible antropomorphic models for
3Dvideoconferencing. In Computer Graphics Inter-
national, 1998. Proceedings, pages 520–527.
GRAPP 2011 - International Conference on Computer Graphics Theory and Applications
206
