
ACTIVE OBJECT CATEGORIZATION ON A HUMANOID ROBOT
Vignesh Ramanathan
Department of Electrical Engineering, Indian Institute of Technology, Kharagpur, 721302, India
Axel Pinz
Institute for Electrical Measurement and Measurement Signal Processing, Graz University of Technology
Kronesgasse 5, A-8010 Graz, Austria
Keywords:
Active vision, Humanoid robot, Object categorization.
Abstract:
We present a Bag of Words-based active object categorization technique implemented and tested on a hu-
manoid robot. The robot is trained to categorize objects that are handed to it by a human operator. The robot
uses hand and head motions to actively acquire a number of different views. A view planning scheme using
entropy minimization reduces the number of views needed to achieve a valid decision. Categorization results
are significantly improved by active elimination of background features using robot arm motion. Our experi-
ments cover both, categorization when the object is handed to the robot in a fixed pose at training and testing,
and object pose independent categorization. Results on a 4-class object database demonstrate the classifica-
tion efficiency, a significant gain from multi-view compared to single-view classification, and the advantage of
view planning. We conclude that humanoid robotic systems can be successfully applied to actively categorize
objects - a task with many potential applications ranging from edutainment to active surveillance.
1 INTRODUCTION
Hand-held object manipulation by a humanoid robot
is particularly challenging, because we cannot ex-
pect precise, reproducible hand trajectories, or perfect
pose for a grasped object. This is in contrast to in-
dustrial robots with much higher precision, and also
more computing power available. Furthermore, when
we compare object recognition tasks in industrial en-
vironments in view of a limited variety of specific ob-
jects to the much more general task of object category
recognition by a humanoid, it is evident that we need
algorithms that can tolerate imprecise manipulations
as well as significant ambiguity due to intra-class vari-
ability and inter-class similarity (cf. (Pinz, 2006)). We
present a novel solution on a small humanoid robot
(Nao), extending known concepts of active recogni-
tion and view planning of specific objects to the much
harder task of active object category recognition.
The benefit of active multiple view-based tech-
niques has been demonstrated for the recognition of
specific objects from an object database a decade ago
(Schiele and Crowley, 1998; Borotschnig et al., 1998;
Borotschnig et al., 2000; Denzler and Brown, 2002).
(Deinzer et al., 2006) focus on view point selection
to reduce the number of steps needed through effec-
tive view planning (see also (Roy et al., 2004)). The
accumulation of data from multiple views of an ob-
ject is also commonly used in 3D object recognition
schemes (Bustos et al., 2005). These systems are usu-
ally trained with all possible views of an object and
provide a pose hypothesis along with the object hy-
pothesis, when given a test image. The pose hypoth-
esis is further used to plan the next best view to be
chosen for effective recognition.
Object categorization is still a focus of current vi-
sion research (Pinz, 2006; Dickinson et al., 2009).
But we do not propose a novel categorization algo-
rithm in this paper. Our innovation is in the combi-
nation of the well known Bag of words (Sivic and
Zisserman, 2003) concept for object categorization
from individual object views with active acquisition
of additional views, view planning, and fusion of in-
dividual view classification results using a Bayesian
scheme. We adopt a view planning approach based
on entropy reduction, similar to (Borotschnig et al.,
1998). The entire algorithm is implemented on the
slim computational platform of the Nao robot, and it
can tolerate the robot’s limited arm motion and grasp-
ing capabilities. An active approach for foreground
235
Ramanathan V. and Pinz A..
ACTIVE OBJECT CATEGORIZATION ON A HUMANOID ROBOT.
DOI: 10.5220/0003312802350241
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 235-241
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

(a)
(b)
(c)
Figure 1: (a) Nao inspecting a toy horse, (b) Horse image
obtained by Nao, and (c) Object database with 4 classes (toy
horses, cows, cars, and soccer players).
feature separation makes the system robust to back-
ground clutter. Finally, we extend this scheme to-
wards active categorization in the case of unknown
pose of the grasped object.
2 THE NAO ROBOT
The Nao robot is a medium sized humanoid capable
of grasping small objects and imitating human limb
movements. Nao has an X86 AMD GEODE 500
MHz CPU with a 256 MB SDRAM and a functional
LINUX Operating system. The robot is equipped
with two CMOS 640 × 480 cameras. One camera is
placed at its forehead and the other at its mouth level.
The cameras facilitate visual observation of the object
handed to the robot. The 5 DoF arm motion coupled
with the 2 DoF head motion help manipulating the
object view. The Nao hands are shaped like a pincer
with three fingers, unlike a human hand. This pincer-
like shape constrains the poses in which a rigid object
can be held by the robot. The present work does not
focus on autonomous grasping of objects by the robot.
A human operator selects an object to be categorized
and hands it to the robot. The object should be handed
in a proper pose to maintain a firm grip during the arm
motion. Once the object is held firmly by the robot,
the arm and head are moved to pre-programmed po-
sitions to capture the desired views. An image of the
Nao robot inspecting a toy horse is shown in fig. 1(a)
and the robot’s view is depicted by fig. 1(b). An im-
age of the 36 objects of the 4-class toy object database
used in the experiments is shown in fig. 1(c).
3 ACTIVE CATEGORIZATION
An object database may be composed of object
classes sharing similar views. Active object catego-
rization aims at disambiguating such object classes by
considering different views of the same object. The
movement to different view points is carried out in a
planned manner to reduce the steps needed to attain
the final result. In this paper, an active object cate-
gorization scheme based on the Bag of Words (BoW)
approach is proposed for the Nao humanoid platform.
This scheme further demonstrates the use of robotic
arm movement to separate the foreground informa-
tion from the image, thus removing the need for ob-
ject segmentation.
The image of an object obtained by the robot de-
pends on the pose of the grasped object relative to the
robot hand, as well as on the view of the grasped ob-
ject that can change due to head, arm and wrist mo-
tion. Hence, the image I of an object o
i
held at a
pose φ
k
, obtained by the camera at a view point v
j
can be represented as I = f (o
i
, v
j
, φ
k
). However, in
this section we assume that all objects are handed to
the robot in one, constant pose φ
c
for all experiments,
i.e., I = f (o
i
, v
j
)|
φ
k
=φ
c
. The case of varying object
poses is discussed in Section 4.
3.1 The Bag of Words Scheme
The BoW model considers an image to be a collection
of local features describing key patches in an image.
In the proposed scheme, we use SIFT (Lowe, 2004)
features to represent the key patches in an image. The
SIFT feature represents each local patch as a 128-
dimension vector. The patch can then be described
by the descriptor and the position of the patch. The
features obtained in an image are vector quantized to
form visual words which describe the image. This
quantization is achieved by clustering all the features
obtained in the database into K clusters. The SIFT
descriptors obtained in any image are then assigned
to one of these clusters. The vector quantization in
our scheme is carried out through hierarchal K-means
clustering as suggested in (Zhang et al., 2009). The
image is finally represented by a frequency vector de-
noting the frequency of different visual words in the
image. The frequency vectors are in turn used to train
and test suitable classifiers for object classification.
3.2 Elimination of Background Features
In object categorization systems, a strong segmen-
tation scheme to separate the object from the back-
ground preceding the categorization step is known to
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
236

(a) (b) (c)
Figure 2: Foreground feature extraction: (a) SIFT features
for object image with background, (b) SIFT features for
background image, (c) SIFT features retained on the object
image after foreground feature extraction.
be advantageous. Especially the BoW is known to be
a “model free” representation, unable to localize and
separate the object (Pinz, 2006). In cluttered scenes,
where many words might be found in the background
and confusing the BoW scheme, foreground object
separation gains more importance. This segmenta-
tion step can be circumvented, if the background in-
formation of the image is known a priori. In the pro-
posed scheme, we exploit the advantage of the robotic
arm movement to extract the background information
from the image.
Once the object is grasped and the robot attains
the desired view point, the object image I
ob j
is cap-
tured. Subsequently, the object is moved out of the
camera’s range by moving the robotic arm, keeping
the camera position fixed. This enables the robot to
capture the background image I
b
without the object
in the scene. SIFT features are extracted from both
the images. A SIFT feature pertaining to I
ob j
is elim-
inated, if a similar feature is found within a 5 pixel
radius in I
b
. The similarity measure used in the pro-
posed scheme is the Euclidian distance between SIFT
features. For a given SIFT feature in I
ob j
, the best
three matches in I
b
are considered as similar features.
This method is effective, if the background image re-
mains static during the time taken by the robot to cap-
ture both images. The time taken to switch from I
ob j
to I
b
is 2 − 3secs, hence it is a reasonable assumption
for most practical situations. Figure 2 shows an ex-
ample illustrating the effectiveness of the scheme.
3.3 Detection from Multiple Views
The 5 DoF arm movement and 2 DoF head movement
help the robot capture multiple views of the same ob-
ject held in the hand. In each step of active object cat-
egorization, the robot attains a different view point.
The robot moves on to the next view point after pro-
cessing the data obtained in the current step. Let N
c
be the number of classes in the database. The pre-
programmed view points attainable by the robot are
given by the set V = {v
i
|i = 1, 2, . . . , N
v
}, where N
v
is
the total number of views. In the proposed scheme, N
v
different classifiers given by the set C = {C
i
|v
i
∈ V }
are trained corresponding to each view. The classifier
C
i
is trained with a database of images obtained by
the robot in the viewpoint v
i
. Random forest classi-
fiers (Bosch et al., 2007) are used in the experiments
demonstrated in the paper.
Let us denote by I
i
and u
i
∈ V , the image obtained
and the view point attained by the robot in the i
th
step
respectively. Let g
i
denote the frequency vector of
foreground visual words in I
i
. The probability that
the object held by the robot belongs to the class o
j
is
given by P(o
j
|I
i
). Let C
k
(o
j
, g
i
) denote the ratio of
votes obtained in favor of o
j
in the trees to the total
number of trees in the classifier C
k
, when tested with
the frequency vector g
i
. P(o
j
|I
i
) is then given by Eq.
1. The overall probability P(o
i
|I
1
, I
2
, . . . , I
n
) after n
steps is given as shown in Eq. 2.
P(o
j
|I
i
) = C
k
(o
j
, g
i
), u
i
= v
k
∈ V (1)
P(o
i
|I
1
, . . . , I
n
) ∝ P(o
i
|I
1
, . . . , I
n−1
)P(o
i
|I
n
) (2)
The view planning step determines the next best
view point for object detection. View planning is car-
ried out in the lines of (Borotschnig et al., 1998), by
choosing the view point that is expected to result in
the highest entropy change. The term H(o
i
|I
1
, . . . , I
n
)
denoting the entropy of the object class, when pro-
vided with images from the first n steps is defined in
Eq. 3. If o
i
is assumed to be the correct object hy-
pothesis, the loss in entropy ∆H on choosing a view
point v
r
after the n
th
step can be estimated as shown
in Eq. 4.
H(o
i
|I
1
, . . . , I
n
) =
−
∑
o
i
P(o
i
|I
1
, . . . , I
n
)log(P(o
i
|I
1
, . . . , I
n
)) (3)
∆H(v
r
, o
i
, I
1
, . . . , I
n
) = H(o
i
|I
1
, . . . , I
n
)
−
Z
G
P(g|o
i
, v
r
)H(o
i
|I
1
, . . . , I
n
, g, v
r
)dg (4)
Hence, for v
r
∈ V , the estimated entropy change
s
n
(v
r
) at the n
th
step is given by Eq. 5. The view re-
sulting in the maximum value of s
n
is chosen as the
next view.
s
n
(v
r
) =
∑
o
i
P(o
i
|I
1
, . . . , I
n
)∆H(v
r
, o
i
, I
1
, . . . , I
n
), (5)
The integration carried out in Eq. 4 is over the en-
tire space of feature vectors G. However, in order to
speed up computation, the integration is limited to the
summation over training feature vector space. The
probability and entropy terms under the integration in
ACTIVE OBJECT CATEGORIZATION ON A HUMANOID ROBOT
237
Eq. 4 can be further broken down as shown in Eq. 7
and Eq. 6 respectively.
H(o
i
|I
1
, . . . , I
n
, g, v
r
) =
−
∑
o
k
P(o
k
|g, v
r
)P(o
k
|I
1
, . . . , I
n
)
log(P(o
k
|g, v
r
)P(o
k
|I
1
, . . . , I
n
))
(6)
P(g|o
i
, v
r
) = P(o
i
|g, v
r
)
P(g|v
r
)
P(o
i
|v
r
)
∝ C
r
(o
i
, g) (7)
P(o
k
|g, v
r
) terms are calculated offline for the
training feature vectors to reduce computation time.
In order to avoid moving to a view point more than
once, the term s
n
(v
r
) is set to zero for all previously
visited view points. The object categorization algo-
rithm is terminated when the highest probability for
an object class exceeds a certain threshold or when
all view points have been exhausted. The first view
point is chosen randomly for all the experiments.
3.4 Multiple View Experiments
The system presented in the paper cannot be evalu-
ated on a pre-existing image database since the eval-
uation is an online process requiring the objects to be
handed to the Nao robot. Hence, our scheme is tested
on a database developed in the lab containing 4 ob-
ject classes: toy ‘horses’, ‘cows’, ‘cars’, and ‘soccer
players’. The object database has 9 objects per class,
amounting to 36 objects in total as seen in Fig. 1(c).
The results in this section are presented by consider-
ing a maximum of 5 different pre-programmed views
for an object. Sample images of objects belonging to
the classes ‘horse’ and ‘car’ are shown for three dif-
ferent views in Fig. 3. The database is composed of
object classes sharing similar appearances along cer-
tain views, like the ‘horse’ and ‘cow’ classes. As seen
in fig. 4, the objects belonging to classes ‘cow’ and
‘horse’ may have a very similar torso and appearance.
The two classes are hence separated by a small inter-
class distance. Also, objects within the same class
may exhibit considerable diversity in appearance, as
evident from the two ‘horse’ images in Fig. 4. All the
experiments are performed on grayscale images. The
experiments in this section deal with objects grasped
at a fixed pose during both the training and testing
phase. The training in all the experiments is per-
formed offline, using the images obtained by the Nao
robot for different views of the object database. A
visual vocabulary of 500 visual words is used in the
experiments.
The effectiveness of the object classification sys-
tem is demonstrated by using the ‘leave one out’ cross
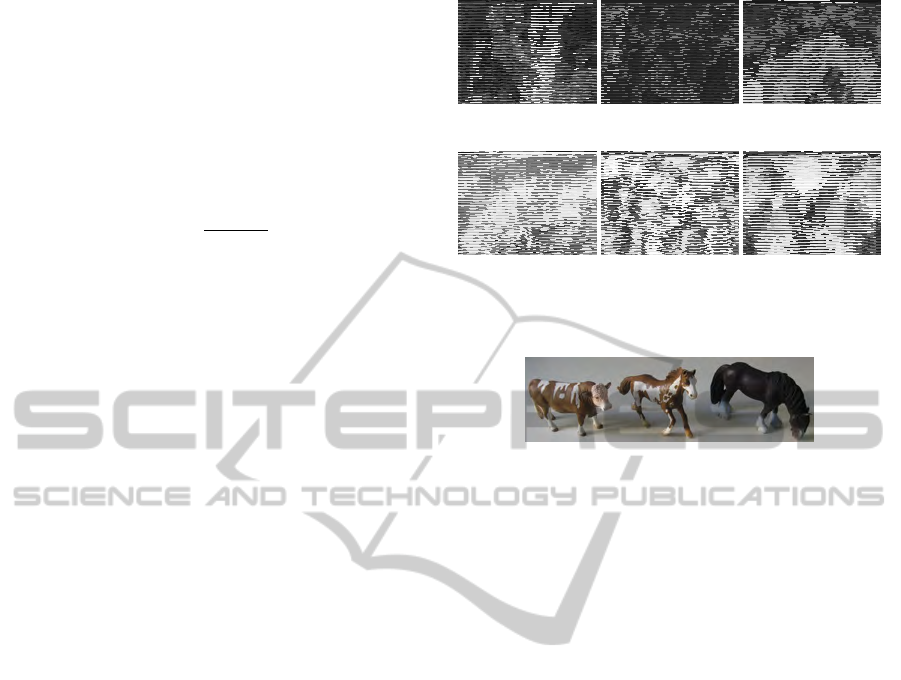
(a) view 1 (b) view 2 (c) view 3
(d) view 1 (e) view 2 (f) view 3
Figure 3: Sample images from different views for the object
classes ‘horse’ and ‘car’.
Figure 4: Sample objects from the classes ‘horse’ and
‘cow’. This example shows the difficulty of handling rather
small inter-class distances (cow vs. the horse in the middle)
and high intra-class variability (the two horses).
validation scheme. The training and testing is car-
ried out 36 times, where each time a different sam-
ple in the object database is left out from the train-
ing set and is used to validate the system. Owing to
the high computational expense of the ‘leave one out’
scheme, the experiments are carried out on an external
Intel(R) Core(TM) i7, 2.67 GHz processor. However,
the proposed scheme was implemented on the Nao
robot and tested for individual object samples, with
identical, but slower behavior. The percentage accu-
racy for 5-view object categorization was found to be
78.88% using the ‘leave one out’ validation scheme,
compared to only 50.00% for single-view categoriza-
tion. The change in processor is not expected to cause
any difference in terms of classification performance.
The average time taken by the robot (running on its
original x86 AMD GEODE 500 MHz processor) if
made to run through all 5 view points is found to be
119.17 secs. On average, 23.83 secs are spent for an-
alyzing a view point. More than 95% of the time is
spent in computing the visual words frequency vector
for the BoW scheme. The robot outputs intermedi-
ate results after analyzing a given view point. The
intermediate outputs are the probability distribution
for the best three classes at every stage. This is done
by voice output after analysing images obtained from
each view; for example the robot says “45% horse,
30% cow, 15% car”.
Figure 5 shows a plot of the average entropy for
each view and for all the object classes. It can be seen
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
238
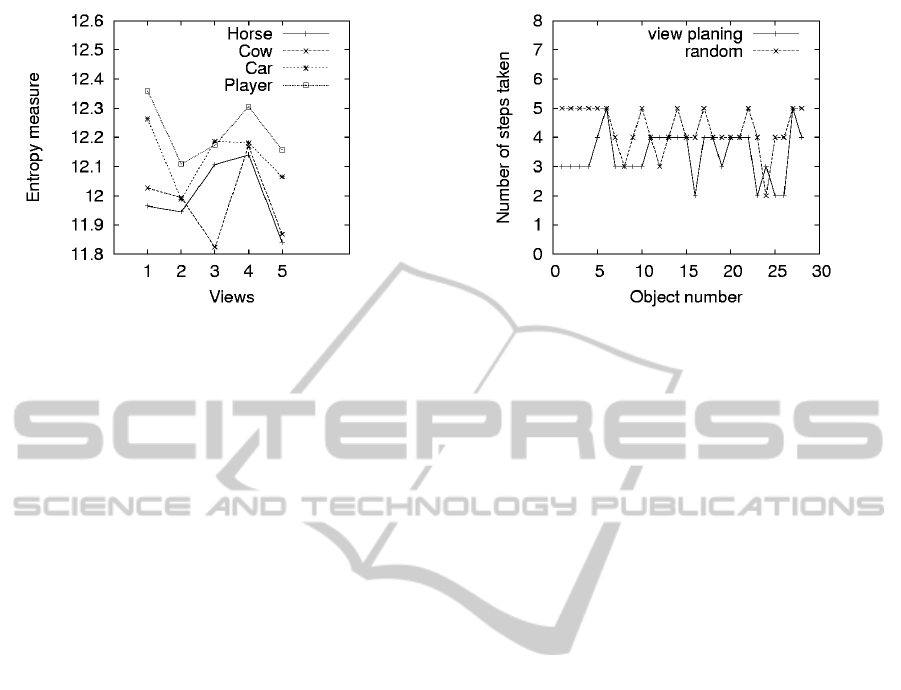
Figure 5: Entropies for different views of each object class.
that some views are more informative than the others
for a given class of objects; thus, justifying the need
for a multi view approach. The effectiveness of a view
planning approach in reducing the number of steps
taken by the robot to reach the final result is demon-
strated in Fig. 6. The average number of steps taken
for each object is plotted for the view planning ap-
proach and a random view approach (where the next
best view at any step is chosen randomly). A prob-
ability threshold of 60% was chosen for the exper-
iments. The view planning based approach is seen
to produce the results in fewer number of steps for a
large number of objects.
The system was also tested with object classes
other than toys. An object database containing forks
and pens (containing 9 objects each) in addition to
the above mentioned 4 toy categories was also used
to test the system. The classification accuracy for the
‘leave one out’ cross validation scheme was found to
be 61.11% among 54 objects (five-view object cate-
gorization), and only 27.78% (single-view).
These results provide significant quantitative evi-
dence for the benefit of the fusion of multiple views,
as well as for the effectiveness of the view planning.
4 TOWARDS UNKNOWN POSE
Many active object recognition systems (Deinzer
et al., 2003; Schiele and Crowley, 1998; Borotschnig
et al., 1998) provide a pose hypothesis along with an
object hypothesis. In these systems, the different ob-
ject poses can be easily quantized and the system can
be trained with any number of object views. However,
in a humanoid unlike an industrial robot, the allowed
poses for a rigid object vary depending on the object
shape due to the pincer-like hand constraint. Hence,
the task of precise pose estimation for an object held
Figure 6: A comparison of the number of steps taken for
different objects, between a random view and planned view
approach. The view planning approach produces the result
in fewer steps for most objects, hence indicating a faster
performance.
by a humanoid may not be very fruitful. In this sec-
tion, we try to overcome the fixed pose constraint by
a probabilistic approach where, given an object im-
age, a probability distribution for the possible views
is obtained. Note that the system is still trained with
a fixed set of object views with object pose remaining
consistent throughout the training phase.
4.1 Probability Distributions for Views
In order to obtain a probability distribution for the
possible views of a given image, we take into ac-
count the positional information of the SIFT features
as well. Let γ represent the combined information of
the positional information along with the visual word
frequency vector g for an image I. The probability
P(o
i
|I) is then given as shown in Eq. 8.
P(o
i
|I) = P(o
i
|γ) (8)
=
∑
v
j
∈V
P(o
i
, v
j
|γ) (9)
The term P(o
i
, v
j
|γ) can be represented as shown
in Eq. 10. This term represents the probability that
the newly obtained object image is similar to the view
of an object belonging to class o
k
seen from the view
point v
j
when it is held in the same pose as that used
for training.
P(o
i
, v
j
|γ) = P(o
i
|γ, v
j
)P(v
j
|γ) (10)
≈ P(o
i
|g, v
j
)
∑
o
k
P(v
j
, o
k
|γ)
The term P(o
i
|g, v
j
) can be obtained from the ran-
dom forest classifier trained for the view point v
j
as
ACTIVE OBJECT CATEGORIZATION ON A HUMANOID ROBOT
239

P(o
i
|g, v
j
) = C
j
(o
i
, g). In order to estimate the sec-
ond term in Eq. 10, we use an approach similar to
the Implicit Shape Model (ISM) scheme (Leibe et al.,
2004). We assume that the center of the object always
coincides with the center of the robotic hand. This as-
sumption is reasonable, since the object has to be held
firmly during the robotic arm motion. The position of
the hand is pre-programmed for a given view point
and is fixed for a view point. Hence, the position of
a reference point (“the hand of the robot”) is known
in every image, since the view point of an image is
known to us. This enables us to find the distance of
the various visual words in any image from the center
of the object (assumed to be the hand position) in the
image. During the training phase, we store the dis-
tance of individual visual words in an image from the
reference point in the image. These values are stored
in a codebook for each class of objects for every view
point v
j
∈ V . Hence, we have N
c
codebooks for ev-
ery classifier/view point. Let us denote by CB
o
i
,v
j
,
the codebook corresponding to the class o
i
and view
point v
j
. The distance values corresponding to a vi-
sual word in the code book are clustered to decrease
the memory storage required on the robot.
When a new image is obtained by the robot, the
distance of the visual words from the reference point
in the image is calculated as before. These distances
are compared with the previously stored distances in
the codebook CB
o
i
,v
j
. For every visual word in the
image, a vote is issued in favor of the class-view point
combination {o
i
, v
j
}, if the distance is within a certain
range ∆d of any of the stored distances for that visual
word in CB
o
i
,v
j
. Let us denote by ψ(o
i
, v
j
|γ) the num-
ber of votes issued in favor of a class-view point com-
bination {o
i
, v
j
} for the image I. P(v
j
, o
k
|γ) can then
be deduced as shown in Eq. 11.
P(v
j
, o
k
|γ) ∝ ψ(o
k
, v
j
|γ) (11)
The above described scheme effectively provides
a probability distribution based on the hypothesis that
similar views of objects belonging to the same class
would have similar spatial distribution of visual words
with reference to an object center. This hypothesis has
been verified in the ISM scheme as shown in (Leibe
et al., 2004). This scheme does not provide a view
planning step since a definite pose hypothesis is not
acquired for a given image.
4.2 Unknown Object Pose Experiments
In this section, experiments are presented to demon-
strate the effectiveness of the proposed technique
for active object categorization with unknown object
pose. The scheme is tested on the 4-class object
(a) (b) (c)
Figure 7: The three different poses used in the experiment
are shown for a toy cow (view point remains unchanged for
all the images). (a) Pose
train
, (b)Pose
180
and (c) Pose
90
.
Table 1: The percentage of correctly classified images us-
ing the proposed scheme for 3 different poses including 2
previously unseen poses.
Object Pose % of objects correctly categorized
Pose
train
72.22%
Pose
180
61.11%
Pose
90
55.56%
database containing cows, horses, cars, and soccer
players. Results are shown for three different object
poses including two poses which are different from
the pose used for training the robot. Due to limitations
on the poses in which certain rigid objects can be held
by the robot, results are shown only for poses applica-
ble to all object categories. Two object poses Pose
90
and Pose
180
which are different from the training pose
Pose
train
are obtained by rotating the object 90
◦
about
the X − axis and 180
◦
about the Z − axis respectively,
starting from the original training pose as shown in
Fig. 7. The results for the ‘leave one out’ cross vali-
dation experiment are shown for the database with 36
objects in Table. 1. It is to be noted that the effec-
tiveness of the scheme would reduce, if the pose of
the object is such that the images obtained from some
view points are vastly different from any of the train-
ing images of objects in its category. This effect can
be seen in the case of Pose
90
, where the images ob-
tained show more variation from the training images
than Pose
180
.
5 CONCLUSIONS
We have presented a study on active object catego-
rization on a humanoid robotic platform. The novelty
of our approach is twofold: First, we demonstrate the
viability of active recognition of categories by gen-
eralizing previous concepts on active recognition of
specific, individual objects. Second, we use the par-
ticular abilities of the humanoid arm to efficiently
eliminate background features. Compared to catego-
rization from a single view, our experimental results
clearly demonstrate a significant gain in correctly cat-
egorized test objects by this ‘active’ approach. Fur-
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
240

thermore, view planning can reduce the number of
active steps needed to produce the final categorization
result. Finally, the overall computational complexity
of object categorization is significantly reduced by the
integration of various views so that we can hope to
see applications on rather slim computing platforms
like Nao in the near future. There certainly is an ex-
tremely high potential for this kind of hand-held, ac-
tive inspection of objects by a humanoid robot, in-
cluding human-robot interaction, home and service
robotics, edutainment, active inspection, and active
surveillance.
In terms of future, basic research in active ob-
ject categorization, this paper just touches a number
of interesting research issues. From a practical point
of view, more expensive humanoid robots may pro-
vide better grasping functionality so that the objects
might be grasped autonomously - avoiding the need
to hand them to the robot. This would also lead to a
wider variety of stable object poses, including the re-
quirement to treat many different view point hypothe-
ses, which cannot be done on a purely Bag of Words
based representation. In view planning, it might be
interesting to use Mutual Information instead of en-
tropy (as (Denzler and Brown, 2002) do), because this
could eliminate the need to mask out view points that
have already been visited before. With many object
categories and many pose hypotheses, view planning
might even be computationally unfeasible, so that one
might wish to resort to a random view selection strat-
egy to save overall computation time (see (de Croon
et al., 2009) for a comparative evaluation).
REFERENCES
Borotschnig, H., Paletta, L., Pranti, M., and Pinz, A. (2000).
Appearance based active object recognition. Image
and Vision Computing, 18:715–727.
Borotschnig, H., Paletta, L., Prantl, M., and Pinz, A. (1998).
Active object recognition in parametric eigenspace. In
British Machine Vision Conference.
Bosch, A., Zisserman, A., and Munoz, X. (2007). Image
classification using random forests and ferns. In In-
ternational Conference on Computer Vision.
Bustos, B., Kein, D., Saupe, D., Schreck, T., and Vranic,
D. (2005). Feature-based similarity search in 3d ob-
ject databases. ACM Computing Surveys (CSUR),
37(4):345–387.
de Croon, G.-E., Sprinkhuizen-Kuyper, I., and
E.O.Postoma (2009). Comparing active vision
models. Image and Vision Computing, 27:374–384.
Deinzer, F., Denzler, J., Derichs, C., and Niemann, H.
(2006). Integrated viewpoint fusion and viewpoint se-
lection for optimal object recognition. In British Ma-
chine Vision Conference.
Deinzer, F., Denzler, J., and Niemann, H. (2003). Viewpoint
selection - planning optimal sequences of views for
object recognition. In Computer Analysis of Images
and Patterns, pages 64–73. Springer Berlin / Heidel-
berg.
Denzler, J. and Brown, C. (2002). Information theoretic
sensor data selection for active object recognition and
state estimation. IEEE Trans. on Pattern Analysis and
Machine Intelligence, 24(2):145–157.
Dickinson, S., Leonardis, A., Schiele, B., and Tarr, M., ed-
itors (2009). Object Categorization. Cambridge Uni-
versity Press.
Leibe, B., Leonardis, A., and Schiele, B. (2004). Com-
bined object categorization and segmentation with an
implicit shape model. In European Conference on
Computer Vision Workshop on Statistical Learning in
Computer Vision.
Lowe, D. (2004). Distinctive image features from scale-
invariant keypoints. International Journal of Com-
puter Vision, 60(2):91–110.
Pinz, A. (2006). Object categorization. Foundations and
Trends in Computer Graphics and Vision, 1(4):255–
353.
Roy, S., Chaudhury, S., and Banerjee, S. (2004). Active
recognition through next view planning: A survey.
Pattern Recognition, 37:429 – 446.
Schiele, B. and Crowley, J. L. (1998). Transinformation for
active object recognition. In International Conference
on Computer Vision.
Sivic, J. and Zisserman, A. (2003). Video google: A text re-
trieval approach to object matching in videos. In Proc.
IEEE International Conference on Computer Vision
(ICCV), pages 1470–1477.
Zhang, S., Tian, Q., Hua, G., Huang, Q., and Li, S. (2009).
Descriptive visual words and visual phrases for image
applications. In Proc. ACM Int. Conf. on Multimedia,
pages 75–84.
ACTIVE OBJECT CATEGORIZATION ON A HUMANOID ROBOT
241
