
ROBUST AND UNBIASED FOREGROUND / BACKGROUND
ENERGY FOR MULTI-VIEW STEREO
Zhihu Chen and Kwan-Yee K. Wong
Department of Computer Science, The University of Hong Kong, Pokfulam Road, Hong Kong
Keywords:
Multi-view stereo, Photo-consistency Energy, Foreground / Background energy, Graph-cuts.
Abstract:
This paper revisits the graph-cuts based approach for solving the multi-view stereo problem, and proposes a
novel foreground / background energy which is shown to be unbiased and robust against noisy depth maps.
Unlike most existing works which focus on deriving a robust photo-consistency energy, this paper targets
at deriving a robust and unbiased foreground / background energy. By introducing a novel data-dependent
foreground / background energy, we show that it is possible to recover the object surface from noisy depth
maps even in the absence of the photo-consistency energy. This demonstrates that the foreground / background
energy is equally important as the photo-consistency energy in graph-cuts based methods. Experiments on real
data sequences further show that high quality reconstructions can be achieved using our proposed foreground
/ background energy with a very simple photo-consistency energy.
1 INTRODUCTION
Multi-view stereo (MVS) is a key technique in com-
puter vision for reconstructing a dense 3D geome-
try of an object from images taken around it. It has
many applications such as preservation of arts, ani-
mation, and augmented reality. Many research works
on MVS have therefore been carried out in the past
few decades. This results in a huge pool of sophisti-
cated algorithms (Seitz et al., 2006).
In this paper, we are going to revisit the graph-
cuts based approach for solving the multi-view stereo
problem. Being one of the most popular MVS algo-
rithms, the graph-cuts based approach has been re-
ceiving a lot of attentions in recent years (Vogiatzis
et al., 2005; Kolmogorov and Zabih, 2002; Lempitsky
et al., 2006; Tran and Davis, 2006; Sinha and Polle-
feys, 2005; Ladikos et al., 2008; Vogiatzis et al., 2007;
Hern
´
andez et al., 2007). Graph-cuts based methods
generally solve the problem by defining a foreground /
background energy for each voxel in a discretized vol-
ume, and a photo-consistency energy between adja-
cent voxels. A specialized graph G is then constructed
with each voxel defining a node in this graph. There
are also two additional nodes, namely the source s
and the sink t representing the foreground and back-
ground respectively, in G which are connected to all
other nodes. The photo-consistency energy is used
to define the weights for the links between adjacent
voxel nodes, whereas the foreground / background
energy is used to define the weights for the links be-
tween the voxel nodes and the sink t / source s. The
object surface is estimated by minimizing the photo-
consistency energy associated with the surface and the
foreground / background energy associated with the
(foreground / background) label of each voxel. This
corresponds to finding the s-t min-cut of G which par-
titions G into two parts, namely S and T , with a mini-
mal cost such that s ∈ S and t ∈ T .
Unlike most existing works which focus on de-
riving a robust photo-consistency energy, this paper
targets at deriving a robust and unbiased foreground
/ background energy. It has been noted in previ-
ous works that the foreground / background energy
is important in preserving both protrusions and con-
cavities in the reconstructed surface. By introducing
a novel data-dependent foreground / background en-
ergy, we show that it is possible to recover the object
surface from noisy depth maps even in the absence
of the photo-consistency energy. To the best of our
knowledge, this is the first time that a reconstruction
is achieved without using a photo-consistency energy
in graph-cuts. This demonstrates that the foreground
/ background energy is as important as the photo-
consistency energy in graph-cuts based methods. Ex-
periments on real data sequences further show that
high quality reconstructions can be achieved using
our proposed foreground / background energy with a
451
Chen Z. and K. Wong K..
ROBUST AND UNBIASED FOREGROUND / BACKGROUND ENERGY FOR MULTI-VIEW STEREO.
DOI: 10.5220/0003308604510458
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 451-458
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

very simple photo-consistency energy.
The rest of the paper is organized as follows. Sec-
tion 2 gives a brief literature review on graph-cuts
based MVS methods. Section 3 describes our pro-
posed algorithm in detail. In particular, a novel unbi-
ased data-dependent foreground / background energy
is introduced. In Section 4, experimental results on
real data sequences as well as evaluation results are
presented. Finally, Section 5 concludes our main con-
tributions.
2 RELATED WORK
Kolmogorov and Zabih (Kolmogorov and Zabih,
2002) were amongst the first to formulate the multi-
view stereo problem as an energy minimization prob-
lem, and reconstruct the 3D object by solving the min-
imization problem using graph-cuts. They proposed
an energy formulation which could handle the visi-
bility problem and impose spatial smoothness while
preserving discontinuity. In (Vogiatzis et al., 2005),
Vogiatzis et al. handled the visibility problem by ex-
ploiting the visual hull to approximate the visibility
of voxels. They also introduced a uniform ballooning
term to avoid the elimination of protrusions in the re-
construction. In (Sinha and Pollefeys, 2005), Sinha et
al. enforced the silhouette constraints while minimiz-
ing the photo-consistency energy and the smoothness
term. Lempitsky et al. (Lempitsky et al., 2006) es-
timated visibility based on the positions and orienta-
tions of local surface patches, and used graph-cuts to
minimize the photo-consistency energy and the uni-
form ballooning term on a CW-complex. In (Tran
and Davis, 2006), Tran and Davis added a set of pre-
defined locations as constraints in graph-cuts to im-
prove the performance. In (Vogiatzis et al., 2007), Vo-
giatzis et al. used Parzen window method to compute
the depth maps robustly, and formulated the photo-
consistency energy using a voting scheme (Esteban
and Schmitt, 2004) based on these depth maps. In
(Hern
´
andez et al., 2007), Carlos et al. proposed a
data-dependent intelligent ballooning term based on
the probability of invisibility of a voxel. The use of
the intelligent ballooning can solve the over-inflated
problem caused by the use of a data-independent uni-
form ballooning term.
Most of the aforementioned methods focus on
tackling the visibility problem in the computation
of the photo-consistency energy (Kolmogorov and
Zabih, 2002; Lempitsky et al., 2006; Vogiatzis et al.,
2007). Only two (Vogiatzis et al., 2005; Hern
´
andez
et al., 2007) of them consider the foreground / back-
ground energy. In (Vogiatzis et al., 2005), Vogiatzis
et al. pointed out that the energy-minimizing surface
might suffer from a lack of protrusions present in the
object if only the photo-consistency energy is consid-
ered. They therefore introduced the uniform balloon-
ing term which favors a large volume inside the visual
hull. Such a ballooning term is in fact a special form
of the foreground / background energy. It only de-
fines a background energy inside the visual hull, and
the foreground energy is simply set to zero. Voxels in-
side the visual hull are therefore biased to be in fore-
ground. By including this term in the energy function,
protrusions in the object can then be reconstructed.
However, depending on the weights assigned to this
term, it may also result in an over-inflated reconstruc-
tion. Besides, the visual hull of the object may not
be always available, especially in a complex back-
ground. In (Hern
´
andez et al., 2007), Carlos et al.
formulated an intelligent ballooning term based on
the overall probability of invisibility of a voxel, and
their method can reconstruct both protrusions as well
as concavities in the object. However, as the overall
probability of invisibility of a voxel is computed as
the product of its probabilities of invisibility in indi-
vidual views, such a ballooning term is not robust. For
instance, if the probability of invisibility of a voxel
in one view is inaccurately calculated due to image
noise, its overall probability of invisibility will be se-
riously affected. Besides, such a ballooning term is
also biased. If the probability of invisibility of a voxel
is small in one view, its overall probability of invisi-
bility will become small, and therefore the voxel is
biased to be in the background.
In this paper, instead of proposing yet another ro-
bust photo-consistency energy, we target at deriving
a novel foreground / background energy that is both
unbiased and robust against noisy depth maps. We
believe that the foreground / background energy plays
an equally important role as the photo-consistency en-
ergy in graph-cuts based methods. In fact, by using
our proposed robust and unbiased foreground / back-
ground energy, we will demonstrate later in this pa-
per that it is possible to reconstruct an object without
even using the photo-consistency energy term. This
further strengthens our belief in the importance of the
foreground / background energy. This also means that
a robust foreground / background energy can actually
compensate the errors caused by the inaccuracy of the
photo-consistency energy.
3 ALGORITHM DESCRIPTION
The input to our method is a sequence of images
I = {I
1
,I
2
,··· , I
N
} taken around an object, together
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
452

with a set of the corresponding camera projection ma-
trices P = {P
1
,P
2
,· ·· , P
N
}, and a bounding box for
the object. Note that we also refer {I
1
,I
2
,· ·· , I
N
} to
as different views. Like other graph-cuts based meth-
ods, we formulate the 3D surface as an energy func-
tion, and solve the reconstruction problem by mini-
mizing the energy function using graph-cuts. Our en-
ergy function E consists of three parts, namely the
photo-consistency energy E
sur f
, the foreground en-
ergy E
f ore
, and the background energy E
back
, and is
given by
E(S) = E
sur f
(S) + E
f ore
(V (S)) + E
back
(V (S)), (1)
where S denotes the object surface, V (S) the object
volume enclosed by S (also refers to as the foreground
volume), and V (S) the background volume. In the
following subsections, we will describe each of these
energy terms in detail.
3.1 Photo-consistency Energy
The photo-consistency energy for a given surface S is
defined as
E
sur f
(S) =
ZZ
S
ρ(x) dA, (2)
where ρ(x) is a dissimilarity measure used to deter-
mine the degree of dissimilarity of a point x as ob-
served in different views. The greatest challenge in
the computation of E
sur f
(S) is the problem of vis-
ibility. We need to determine the set of images
I
vis
(I
vis
⊆ I) in which a point x is visible. In (Vogiatzis
et al., 2005), this problem is tackled by utilizing the
visual hull of the object to approximate the visibil-
ity of nearby points. However, such an approxima-
tion will fail disgracefully in regions of concavities
on the object surface. Besides, this approach cannot
deal with self-occlusions and the visual hull might not
be always available.
In this paper, we adopt a robust voting scheme as
described in (Esteban and Schmitt, 2004) to compute
E
sur f
(S). Concretely, for each 3D point x inside the
bounding box of the object, each view I
i
will cast a
vote V OT E
i
(x) for x. All the VOTE
i
(x) are then com-
bined together using the formula
ρ(x) = e
−µ
∑
N
i=1
VOTE
i
(x)
. (3)
To compute VOTE
i
(x) for a 3D point x inside the
bounding box, we march along the corresponding op-
tic ray
o
i
(d) = c
i
+
x − c
i
kx − c
i
k
d (4)
inside the bounding box, where c
i
is the camera center
for view I
i
, and d is the depth value for a 3D point
along the optical ray in view I
i
(x corresponds to the
depth value d
x
). For each depth value d, we project
the corresponding 3D point o
i
(d) onto a set N (i) of
M closest views, and compute the NCC values using
a window of size m × m centered at the projections of
o
i
(d) on I
i
and I
j∈N (i)
with sub-pixel accuracy. We
then combine these M NCC values into a single score
C (d) and cast a vote to x using the following formula
VOT E
i
(x) =
C (d
x
) if C (d
x
) ≥ C (d) ∀d
0 otherwise
(5)
There are different methods for calculating C (d).
In (Esteban and Schmitt, 2004), C (d) is simply the
average of the M NCC values. In (Vogiatzis et al.,
2007), Vogiatzis et al. pointed out that the global
maximum may not be necessarily corresponding to
the correct depth, and they used a Parzen window
technique to combine all the local maxima of the NCC
values. As the focus of this paper is the foreground /
background energy, we simply define C (d) as the av-
erage value of the largest M/2 NCC values. Although
this strategy will result in noisy depth maps, experi-
mental results show that high quality reconstructions
can be achieved using the robust and unbiased fore-
ground / background energy introduced in the next
subsection.
3.2 Foreground/Background Energy
If the energy function only consists of the photo-
consistency energy, protrusions and concavities in the
object will be removed in the reconstructed surface.
In order to prevent this situation, the energy func-
tion must include the foreground / background en-
ergy. The foreground energy of a 3D point x is the
cost of assigning x to the foreground, and the back-
ground energy of x is the cost of assigning x to the
background. In (Vogiatzis et al., 2005), the fore-
ground / background energy is formulated as a uni-
form ballooning term in which E
f ore
(V (S)) = 0 and
E
back
(V (S)) = b
RRR
V (S)
dV , where b is a weight pa-
rameter. This can be considered as the shape prior
of the object which favors a large volume. However,
voxels inside the visual hull are biased to be in the
foreground with such a data-independent uniform bal-
looning term, and therefore it cannot deal with deep
concavities in the object.
In (Hern
´
andez et al., 2007), Hern
´
andez et al. pro-
posed a data-aware intelligent ballooning term based
on the overall probability of invisibility of a 3D
point. This formulation is theoretically correct, but
will be very sensitive to noise in practice. Theoret-
ically speaking, the overall probability of invisibil-
ity of a 3D point x inside the object should be close
ROBUST AND UNBIASED FOREGROUND / BACKGROUND ENERGY FOR MULTI-VIEW STEREO
453

to one. However, due to image noise, the “correct
depth” for the ray passing through x may be incor-
rectly estimated in some views. The probability of
invisibility of x in those views may become close to
zero, making its overall probability of invisibility also
close to zero. x will therefore be biased to be in
the background. For this reason, the intelligent bal-
looning term in (Hern
´
andez et al., 2007) is not robust
to noise and could only work in the case when the
depth maps computed from different views are very
accurate. This in turn implies a very robust photo-
consistency energy is needed. This, however, is very
difficult to achieve in practice.
As voting scheme has been proven to be robust to
noise, we propose to use voting scheme to formulate
the foreground / background energy. Intuitively, if a
3D point V 1 is associated with a depth d
V 1
in view I
i
which is larger than the correct depth d
corr
, it is likely
that V 1 will be invisible in I
i
. Meanwhile, if a 3D
point V 2 is associated with a depth d
V 2
in I
i
which is
smaller than d
corr
, it is likely that it will be visible in I
i
(see Fig. 1). In this paper, we approximate the correct
depth by the estimated depth. In order to utilize the
visibility information, each view will cast a vote for
the 3D point x as follows:
B V OTE
i
(x) =
1 if d
x
< d
corr
0 otherwise
(6)
The foreground / background energy of a 3D point x
is then defined as
energyForeground(x) = 1 − e
−λ
∑
N
i=1
B VOT E
i
(x)
(7)
energyBackground(x) = e
−λ
∑
N
i=1
B VOT E
i
(x)
(8)
Note that energyForeground(x) +
energyBackground(x) = 1. Finally, the foreground /
background energy for the surface is formulated as
E
f ore
(V (S)) = b
ZZZ
V (S)
energyForeground(x)dV
(9)
E
back
(V (S)) = b
ZZZ
V (S)
energyBackground(x)dV
(10)
where b is a weight parameter, and a value between
0.1 to 0.2 is suitable for all our experiments. λ is
also a constant value, and it mainly depends on the
number of views in the dataset. The proposed fore-
ground / background energy is unbiased. Whether x is
more probable to be in the foreground or background
depends on the values of energyForeground(x) and
energyBackground(x). If energyForeground(x) is
smaller, x is more probable to be in the foreground.
Otherwise, it is more probable to be in the back-
ground. Moreover, if the depths for x in some views
are incorrect, it will only influence the votings for
V2
d
V2
d
corr
d
V1
V
corr
V1
c
i
Figure 1: Consider a ray originated from the camera center
c
i
of view I
i
that passes through the bounding box. Along
this ray, the score C(V
corr
) for voxel V
corr
is a maximum,
and hence the depth corresponding to V
corr
is the estimated
correct depth, denoted by d
corr
. Voxel V1 has a depth d
V 1
which is larger than d
corr
. V 1 is therefore deemed to be
invisible in view I
i
as it is occluded by the voxel V
corr
. On
the contrary, voxel V 2 has a depth d
V 2
which is smaller than
d
corr
. V 2 is therefore deemed to be visible in view I
i
. In this
case, B V OTE
i
(V 2) = 1 and B V OTE
i
(V 1) = 0.
x from those views. Therefore, the proposed fore-
ground / background energy is also more robust to
image noise.
4 EXPERIMENTAL RESULTS
In the following subsections, implementation details
of the proposed algorithm and experimental results
will be described in detail. Note that, unlike the
method presented in (Vogiatzis et al., 2005), the al-
gorithm proposed in this paper does not require using
the visual hull as an initialization.
4.1 Graph Structure
A 3D space slightly larger than the bounding box is
quantized into voxels of size h × h × h. As illustrated
in Fig. 2, a graph G is constructed with each voxel
defining a node. Two nodes are connected if their
corresponding voxels are 6-neighbor of each other. G
also includes two additional nodes, namely the source
s which is fixed in the foreground and the sink t
which is fixed in the background. All voxel nodes
are connected to both s and t. The weight of the
link between a voxel node x
i
and s is defined as b ×
energyBackground(x
i
) and the weight of the link be-
tween x
i
and t is defined as b×energyForeground(x
i
).
If voxel node x
i
and voxel node x
j
are connected, the
weight of the link is defined as
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
454
w
i j
= ρ
x
i
+ x
j
2
. (11)
Moreover, if the center of a voxel is outside the
bounding box, the weight of the link between the cor-
respond node and t is reset to infinity and the weight
of the link between the correspond node and s is reset
to zero.
source (foreground)
sink (background)
x
i
x
j
x
k
b×energyBackground(
x
i
)
b×energyForeground(
x
i
)
b×energyBackground(
x
j
)
b×energyForeground(
x
j
)
b×energyBackground(x
k
)
b×energyForeground(
x
k
)
w
ij
Figure 2: Graph structure for MVS problem. Each node
in the graph represents a voxel. Two nodes are connected
if the corresponding voxels are 6-neighbor of each other.
The weight of the link between two connected nodes is
defined by the dissimilarity measure ρ(x) computed at the
midpoint between the centers of the corresponding voxels.
All nodes are also connected to two special nodes, namely
the source and the sink, with weights of the links defined as
b × energyBackground(x
i
) and b × energyForekground(x
i
)
respectively.
4.2 Results and Evaluations
The graph-cuts algorithm proposed in (Boykov and
Kolmogorov, 2004) is used to segment the graph into
two parts: source part (foreground) and sink part
(background). Marching cube algorithm (Lorensen
and Cline, 1987) is then used to generate a triangu-
lated mesh from the foreground voxels, and Taubin
smooth (Taubin, 1995) is used to smooth the resulting
mesh.
We have applied our algorithm to several datasets
on a system with Intel(R) Core(TM) 2 Duo CPU
E6750 @ 2.66GHZ 2.67GHZ and 8GM RAM. We
have also submitted our reconstruction results of two
standard datasets, namely the temple sequence and
dinosaur sequence, to the evaluation website (Seitz
et al., ) for comparison. The results are compared in
terms of accuracy and completeness. The accuracy
metric used is defined as the distance d such that 90%
of the reconstruction is within d mm of the ground
truth, while the completeness metric used is defined
as the percentage X such that X % of the ground truth
is within 1.25 mm of the reconstructed result. Table 1
shows the evaluation results. Details of the sequences
used and the reconstruction results are discussed in
the following subsections.
Temple. The temple sequence was captured in Stand-
ford Spherical Gantry and is available from the web-
site (Seitz et al., ). It consists of 312 images and the
image resolution is 640 × 480. The templeRing se-
quence is a sparse sequence sampled from the temple
sequence and consists of only 47 images. Both se-
quences were used in our experiments.
(a)
(b)
(c)
(d)
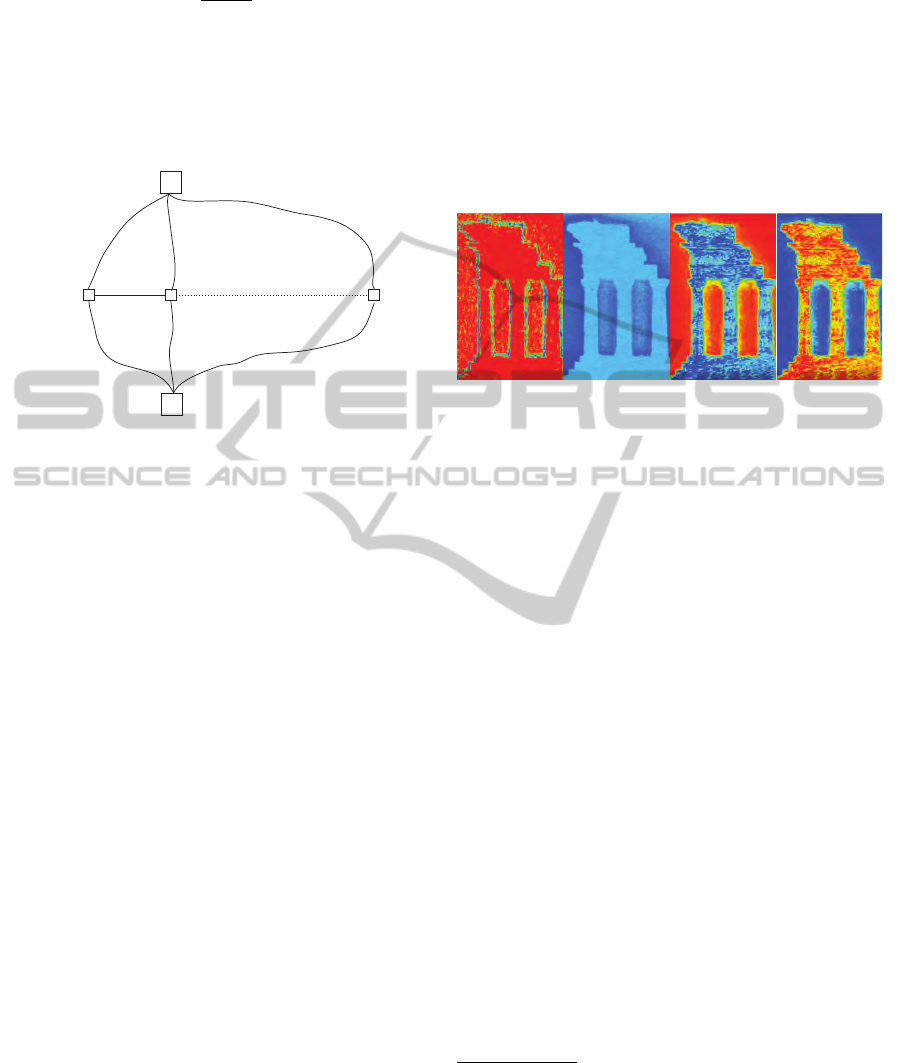
Figure 3: Comparison between the proposed foreground /
background energy and the intelligent ballooning term pro-
posed in (Hern
´
andez et al., 2007). From left to right: (a)
photo-consistency energy, (b) intelligent ballooning term,
(c) proposed foreground energy, and (d) proposed back-
ground energy. Blue color indicates a low energy value and
red color indicates a high energy value. Note that the fore-
ground energy values are lower inside the object and higher
outside the object. The background energy values, on the
other hand, are higher inside the object and lower outside
the object.
Fig. 3 compares our foreground / background en-
ergy with the intelligent ballooning term
1
proposed
in (Hern
´
andez et al., 2007). In this figure, blue color
indicates a low energy value and red color indicates
a high energy value. Fig. 3(a) shows a plot of the
photo-consistency energy for a particular cross sec-
tion, which reveals that the original depth maps are
quite noisy. Fig. 3(b) shows a plot of the intelligent
ballooning term for the same cross section. It can be
observed that, although still separable, energy values
inside the temple are very close to those in the back-
ground. Besides, the space in the upper right corner
as well as that between the pillars are contaminated
by noises. Fig. 3(c) and (d) show our proposed fore-
ground and background energy, respectively, for the
same cross section. It can be seen that energy val-
ues inside the temple are significantly different from
1
In (Hern
´
andez et al., 2007), the probability den-
sity function of invisibility in each view is computed
by pd f (d) = α ∗ Uni f orm(d,dMin,dMax) + (1 − α) ∗
Gaussian(d, mean
d
,sigma
d
), where dMin,dMax are the
depths of intersections of the optic ray with the bounding
box, mean
d
is the measured depth, sigma
d
corresponds to
the length of 1 pixel back-projected in 3D, and α is a prede-
fined constant outlier ratio.
ROBUST AND UNBIASED FOREGROUND / BACKGROUND ENERGY FOR MULTI-VIEW STEREO
455

Table 1: Evaluation results for our reconstructions of the templeRing sequence, temple sequence , and dinoRing sequence. The
accuracy value is the distance d such that 90% of the reconstruction is within d mm of the ground truth. The completeness
value is the percentage X such that X % of the ground truth is within 1.25 mm of the reconstructed result.
Name Images Image Size accuracy(mm) completeness(%)
templeRing 47 640×480 0.54 99.6
temple 312 640×480 0.47 99.3
dinoRing 48 640×480 0.46 95.1
(a)
(b) (c)
(e)
(f)
(g)
(d)
(h)
Figure 4: (a) Two images from the templeRing sequence. Reconstruction results using (b) photo-consistency energy with
a small uniform ballooning term, (c) photo-consistency energy with a large uniform ballooning term, (d) photo-consistency
energy with intelligent ballooning term, (e,f) photo-consistency energy with the proposed foreground / background energy,
and (g, h) only the proposed foreground / background energy.
those in the background, and this allows an excellent
segmentation of the foreground and background.
Fig. 4 shows the reconstruction results of the
templeRing sequence using photo-consistency energy
with a small uniform ballooning term (Fig. 4(b)),
photo-consistency energy with a large uniform bal-
looning term (Fig. 4(c)), photo-consistency energy
with intelligent ballooning term (Fig. 4(d)), photo-
consistency energy with the proposed foreground /
background energy (Fig. 4(e) and (f)), and only the
proposed foreground / background energy (Fig. 4(g)
and (h)), respectively. From Fig. 4(b) and (c), it can
be seen that a small uniform ballooning term would
result in an incomplete model, whereas a large uni-
form ballooning term would cause an over-inflated
model. Using the intelligent ballooning term in place
of the uniform ballooning term could alleviate this
problem, and the temple was reconstructed with de-
tails. Nonetheless, it can be seen in Fig. 4(d) that there
are some errors near the top and bottom of the recon-
struction, which can be explained by the plot of the
intelligent ballooning term shown in Fig. 3(b). The
best reconstruction result was obtained using photo-
consistency energy with the proposed foreground /
background energy (see Fig. 4(e) and (f)). The roof,
the stairs and the concavities at the bottom of the tem-
ple were all accurately reconstructed. The accuracy of
the reconstruction is 0.54 mm and the completeness is
99.6%. To further test the usefulness of the proposed
foreground / background energy, we have carried out
a reconstruction using only the proposed foreground /
background energy. Not surprisingly, good result was
achieved since the foreground / background energy
alone allows an excellent segmentation of the fore-
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
456
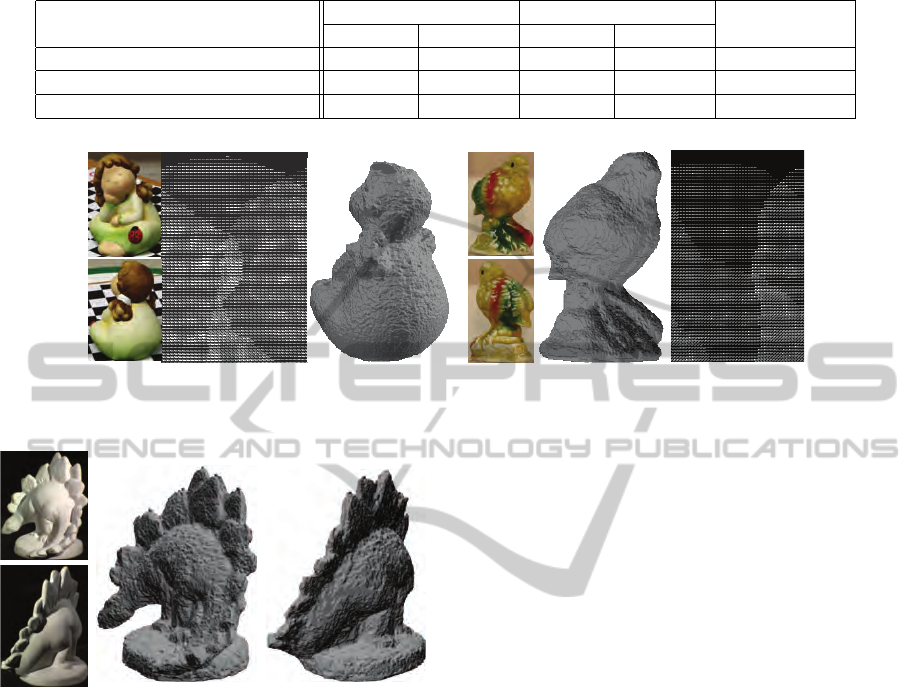
Table 2: Comparison between the reconstruction results of the standard temple sequence and templeRing sequence obtained
by (Vogiatzis et al., 2005), (Vogiatzis et al., 2007) and the proposed method.
temple(312) templeRing(47)
Method
acc.[mm] comp.[%] acc.[mm] comp.[%]
Initialization
Proposed 0.47 99.3 0.54 99.6 Bounding Box
Vogiatzis (Vogiatzis et al., 2005) 1.07 90.7 0.76 96.2 Visual Hull
Vogiatzis (Vogiatzis et al., 2007) 0.5 98.4 0.64 99.2 Visual Hull
a
b
Figure 6: Reconstruction results of (a) girl sequence, and (b) bird sequence.
Figure 5: Two images from the dinoRing sequence and the
reconstruction result rendered in two different viewpoints.
ground and background (see Fig. 3(c) and (d)).
We have also carried out a reconstruction of the
temple sequence using photo-consistency energy with
the proposed foreground / background energy. Table 2
compares our reconstruction results of the temple se-
quence and templeRing sequence with that obtained
by (Vogiatzis et al., 2005) and (Vogiatzis et al., 2007),
both of which use a uniform ballooning term. Al-
though a bounding box instead of the visual hull is
used in our algorithm, our results are still better than
that obtained by (Vogiatzis et al., 2005) and (Vogiatzis
et al., 2007) in terms of accuracy and completeness.
Dinosaur. The dinoRing sequence consists of 48 im-
ages and the image resolution is 640 × 480. This se-
quence is relatively more difficult than the temple se-
quence due to the lack of features on the body of the
dinosaur. Nonetheless, the proposed algorithm still
produced good result. Fig. 5 shows two images from
the sequence and the reconstruction result rendered in
two different viewpoints. The accuracy of the recon-
struction result is 0.46 mm and the completeness is
95.1%.
Girl and Bird. Both the girl sequence and the bird
sequence consist of 60 images taken around the object
The girl sequence contains specular reflections and
is lack of features, especially in the face, hands and
feet. The bird sequence, on the other hand, has many
protrusions and concavities at the bottom part of the
bird model. Our algorithm could recover both objects
with details (see Fig. 6).
5 CONCLUSIONS
This paper revisits the graph-cuts based approach
for solving the multi-view stereo problem. Unlike
most existing works which focus on deriving a photo-
consistency energy that is robust against invisibility,
this paper targets at deriving a robust and unbiased
foreground / background energy. A voting scheme is
adopted to derive a novel data-dependent foreground
/ background energy which is shown to be unbiased,
robust against noisy depth maps, and allows an excel-
lent segmentation of the foreground and background.
In fact, we have demonstrated that it is possible to re-
cover the object surface using only the proposed fore-
ground / background energy (i.e., without using the
photo-consistency energy term in graph-cuts). This
demonstrates that the foreground / background energy
ROBUST AND UNBIASED FOREGROUND / BACKGROUND ENERGY FOR MULTI-VIEW STEREO
457

is equally important as the photo-consistency energy
in graph-cuts based methods. Experiments on real
data sequences further show that high quality recon-
structions can be achieved using our proposed fore-
ground / background energy with a very simple photo-
consistency energy.
REFERENCES
Boykov, Y. and Kolmogorov, V. (2004). An experimental
comparison of min-cut/max-flow algorithms for en-
ergy minimization in vision. IEEE Trans. on Pattern
Analysis and Machine Intelligence, pages 1124–1137.
Esteban, C. H. and Schmitt, F. (2004). Silhouette and stereo
fusion for 3d object modeling. Computer Vision and
Image Understanding, pages 367–392.
Hern
´
andez, C., Vogiatzis, G., and Cipolla, R. (2007). Prob-
abilistic visibility for multi-view stereo. In Proc. Conf.
Computer Vision and Pattern Recognition, pages 1–8.
Kolmogorov, V. and Zabih, R. (2002). Multi-camera scene
reconstruction via graph cuts. In Proc. European
Conf. on Computer Vision, pages 82–96.
Ladikos, A., Benhimane, S., and Navab, N. (2008). Multi-
view reconstruction using narrow-band graph-cuts
and surface normal optimization. In Proc. British Ma-
chine Vision Conference, pages 143–152.
Lempitsky, V. S., Boykov, Y., and Ivanov, D. V. (2006). Ori-
ented visibility for multiview reconstruction. In Proc.
European Conf. on Computer Vision, pages 226–238.
Lorensen, W. E. and Cline, H. E. (1987). Marching cubes:
A high resolution 3d surface construction algorithm.
SIGGRAPH Comput. Graph., pages 163–169.
Seitz, S. M., Curless, B., Diebel, J., Scharstein, D., and
Szeliski, R. Multi-view stereo evaluation web page.
http://vision.middlebury.edu/mview/.
Seitz, S. M., Curless, B., Diebel, J., Scharstein, D., and
Szeliski, R. (2006). A comparison and evaluation
of multi-view stereo reconstruction algorithms. In
Proc. Conf. Computer Vision and Pattern Recognition,
pages 519–528.
Sinha, S. N. and Pollefeys, M. (2005). Multi-view recon-
struction using photo-consistency and exact silhouette
constraints: A maximum-flow formulation. Proc. Int.
Conf. on Computer Vision, pages 349–356.
Taubin, G. (1995). A signal processing approach to fair
surface design. In SIGGRAPH ’95: Proceedings of the
22nd annual conference on Computer graphics and
interactive techniques, pages 351–358.
Tran, S. and Davis, L. (2006). 3d surface reconstruction
using graph cuts with surface constraints. In Proc.
European Conf. on Computer Vision, pages 219–231.
Vogiatzis, G., Hern
´
andez Esteban, C., Torr, P. H. S., and
Cipolla, R. (2007). Multiview stereo via volumet-
ric graph-cuts and occlusion robust photo-consistency.
IEEE Trans. on Pattern Analysis and Machine Intelli-
gence, pages 2241–2246.
Vogiatzis, G., Torr, P. H. S., and Cipolla, R. (2005). Multi-
view stereo via volumetric graph-cuts. In Proc. Conf.
Computer Vision and Pattern Recognition, pages 391–
398.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
458
