
A NEW OBJECT RECOGNITION SYSTEM
Nikolai Sergeev and Guenther Palm
Institute of Neural Information Processing, Ulm University, Ulm, Germany
Keywords:
Object recognition system, Invariant object representation.
Abstract:
This paper presents a new 2D object recognition system. The object representation used by the system is
rotation, translation, scaling and reflection invariant. The system is highly robust to partial occlusion, defor-
mation and perspective change. The last makes it applicable to 3D tasks. Color information can be ignored
as well as combined with form representation. The boundary of an object to be recognized doesn’t need to
be path-connected. The time demand to learn a new object doesn’t depend on the number of objects already
learned. No object segmentation prior to recognition is needed. To evaluate the system the 3D object library
COIL-100 was used.
1 INTRODUCTION
1.1 System Architecture
An object recognition system usually consists of
three parts. Part one extracts image primitives e.g.
edges(Canny, 1986), lines(Hough, 1962), orientation
histograms (Dalal and Triggs, 2005) or moments (Hu,
1962),(Reiss, 1993). Part two constructs feature vec-
tors. Finally part three is responsible for learning
and retrieval of the information e.g. support vector
machines (Vapnik, 1998), artificial neural networks
(Rosenblatt, 1962; Bishop, 2007) or regression esti-
mators (Gyofri et al., 2002). The system to introduce
in this paper also has this architecture. Image prim-
itives are half ellipses. One feature vector encodes a
combination of half ellipses. To learn and compare
the feature vectors a new storage as well as a new re-
trieval algorithm were developed.
1.2 Motivation
Affine invariant object representation methods nor-
mally used are either not suitable for not path-
connected objects as fourier descriptors (Arbter et al.,
1990) or need segmentation prior to recognition as
moments (Reiss, 1993). One common problem of
these approaches is discrimination. Invariant features
deliver no unique description of an object. So it can
happen that two objects with similar features have
nothing in common for an observer. The represen-
tation to be introduced in this paper overcomes theses
problems. However it is not suitable for standard ma-
chine learning algorithms as support vector machines
or neural networks. An image to analyze doesn’t pro-
duce just a single representation vector but e.g. more
than 50
10
feature vectors. It makes standard retrieval
algorithms unusable. For that reason a new type of
storage together with a new search algorithm was de-
veloped.
In sum all the three characteristic components of
this object recognition system (features, representa-
tion, machine learning algorithm) are new.
2 OUTLINE OF
IMPLEMENTATION
An object is represented as a set of half ellipse com-
binations A as shown in Figure1. Combinations don’t
need to be of equal length.
For each a ∈ A the system looks for a correspond-
ing half ellipses combination b in the image to ana-
lyze. b should be as long as possible.
More precisely expressed: From the image to
analyze the system extracts a set of half ellipses
B as shown in Figure 2. For each combina-
tion (a
i
)
i∈{1,...,n}
∈ A a maximal m ∈ {1, ..., n} has
to be determined for which a subsequence π ∈
{1, ..., n}
{1,...,m}
with π(1) = 1 and (b
i
)
i∈{1,...,m}
∈ B
m
exist so that (a
π(i)
)
i∈{1,...,m}
can be approximately
transformed into (b
i
)
i∈{1,...,m}
through translation, ro-
tation, scaling, reflection and perspective change as
395
Sergeev N. and Palm G..
A NEW OBJECT RECOGNITION SYSTEM.
DOI: 10.5220/0003307103950400
In Proceedings of the International Conference on Computer Vision Theory and Applications (VISAPP-2011), pages 395-400
ISBN: 978-989-8425-47-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
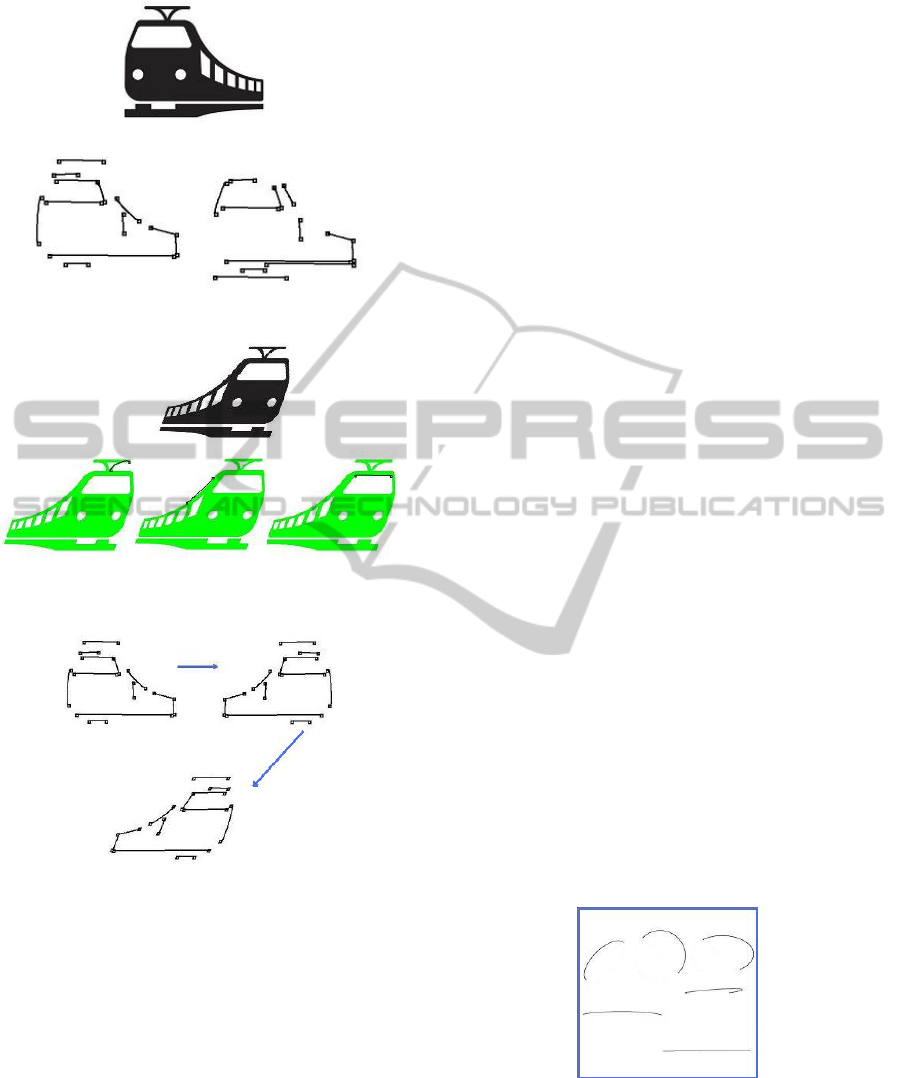
Figure 1: An object to learn and its representation.
Figure 2: An object to analyze with a set of extracted half
ellipses.
Figure 3: A way to transform one combination into anther.
shown in Figure 3. All in all the entire number of
combination pairs to be compared is
∑
(a
1
,...,a
n
)∈A
n
∑
m=1
n − 1
m − 1
|B|
m
!
. (1)
With A containing only one combination of length n =
10 and B consisting of 50 half ellipses the number of
pairs is at least 50
10
.
As the system makes the check for each subse-
quence (a
π(i)
)
i∈{1,...,m}
it is robust to partial occlusion.
Without any further extension this representation
is color invariant.
3 INVARIANT
REPRESENTATION OF A
COMBINATION OF HALF
ELLIPSES
3.1 Overview
In this section a number of functions F
i
are intro-
duced. There are needed to obtain an invariant rep-
resentation of a half ellipses combination. To under-
stand their geometrical meaning it is unnecessary to
read their mathematical description. The correspond-
ing figures are enough. The most important figure is
number 7. It shows the rotation, translation and scal-
ing invariant representation of a combination of half
ellipses.
3.2 Half Ellipses
For C = R
2
and P(C) standing for power set of C
a half ellipse is defined as a pair (e, B) ∈ C
2
× P(C)
with e
1
6= e
2
for which (a, b,t
0
, δ) ∈ [0, ∞) × [0, ∞) ×
R × {−1, 1} as well as (c, β) ∈ C × R exist so that
B =
T
c
R
β
acost
bsint
t ∈
[t
0
,t
0
+ δπ]
∪
[t
0
+ δπ,t
0
]
(2)
and
e
1
= T
c
R
β
acost
0
bsint
0
, (3)
e
2
= T
c
R
β
acos(t
0
+ π)
bsin(t
0
+ π)
. (4)
T
c
, R
β
stand for translation, scaling and rotation re-
spectively. The set of half ellipses will be denoted
with HE. In other words a half ellipse consists of end-
points e
1
, e
2
∈ C and of a set of bow points B ∈ P(C).
The endpoints of a half ellipse play a very important
Figure 4: Examples of half ellipses.
role for the invariant representation. There are mainly
two reasons to use half ellipses. An affine transfor-
mation A 6= 0 always maps a half ellipse onto another
half ellipse. The second reason is the variety of half
ellipses as Figure 4 shows.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
396

3.3 Rotation, Translation and Scaling
Invariant Representation of a Half
Ellipse
Now a unique rotation, translation and scaling invari-
ant representation of a half ellipse will be introduced.
At first two preliminary definitions are needed. For
x, y ∈ C with x 6= y the function F
1
x,y
is defined as
F
1
x,y
:
(
C → C
z 7→
z−x
y−x
. (5)
Figure 5 shows the geometric meaning of the trans-
Figure 5: Geometric meaning of F
1
x,y
(z).
formation. F
1
x,y
is an affine transformation with
F
1
x,y
(x) = 0 and F
1
x,y
(y) = 1. The second function
F
2
: HE → C is defined as
F
2
(e, B) =
max
x∈B
F
1
e
1
+e
2
2
, e
1
(x)
1
max
x∈B
F
1
e
1
+e
2
2
, e
1
(x)
2
. (6)
Finally the invariant representation F
3
: HE → C is
defined in such a way that for always existent x,y ∈ B
with
F
2
(e, B) =
F
1
e
1
+e
2
2
, e
1
(x)
1
F
1
e
1
+e
2
2
, e
1
(y)
2
(7)
F
3
(e, B) =
z − SIGNUM(z)
F
1
e
1
+e
2
2
, e
1
(y)
2
(8)
with
z =
F
1
e
1
+e
2
2
, e
1
(x)
1
. (9)
For (e, B) in Figure 6
F
3
(e, B) =
M
1
− 1
M
2
. (10)
Figure 6: Representation of a half ellipse.
It can be shown that for each x ∈ C a half ellipse
(e, B) ∈ HE exists with F
3
(e, B) = x. Additionally for
two half ellipses (e, B), ( ˜e,
˜
B) ∈ HE with F
3
(e, B) =
F
3
( ˜e,
˜
B) it can be shown that they can be transformed
in each other through translation, rotation and scaling.
On the other side F
3
(e, B) is invariant to translation,
rotation and scaling of (e, B).
3.4 Extraction of a Half Ellipses
In the literature one can find several methods to ex-
tract ellipses. Most of them are based on Hough trans-
form e.g. (Tsuji and Matsumoto, 1978). However
they are not suitable for half ellipse detection as they
do not deliver endpoints.
Endpoints of a half ellipse to be extracted don’t
need to be labeled or explicitly visible e.g. as corners.
For that reason from a circle the system extracts sev-
eral half circles. The exact number depends on the
size of the circle. A bigger one can deliver over 100
half circles.
The invariant representation introduced above of-
fers a convenient way to extract a half ellipse. As the
Figure 6 shows the system determines two extremes
for a chain of edge points. In the next step it calcu-
lates the unique half ellipse which would also have
such extremes and endpoints. Then it checks if all the
edge points of the chain are in an ε-neighborhood of
the calculated unique half ellipse.
3.5 Rotation, Translation and Scaling
Invariant Representation of a
Combination of Half Ellipses
The set of combinations C =
S
n∈N
HE
n
consists of
ordered sequences of half ellipses. Rotation, trans-
lation and scaling invariant representation F
4
: C →
S
n∈N
R
6n
is defined as
F
4
(e
i
, B
i
)
i
=
F
1
e
1
1
,e
1
2
(e
i
1
), F
1
e
1
1
,e
1
2
(e
i
2
), F
3
(e
i
, B
i
))
i
(11)
with i ∈ {1, ..., n}. Values of the representation of the
A NEW OBJECT RECOGNITION SYSTEM
397
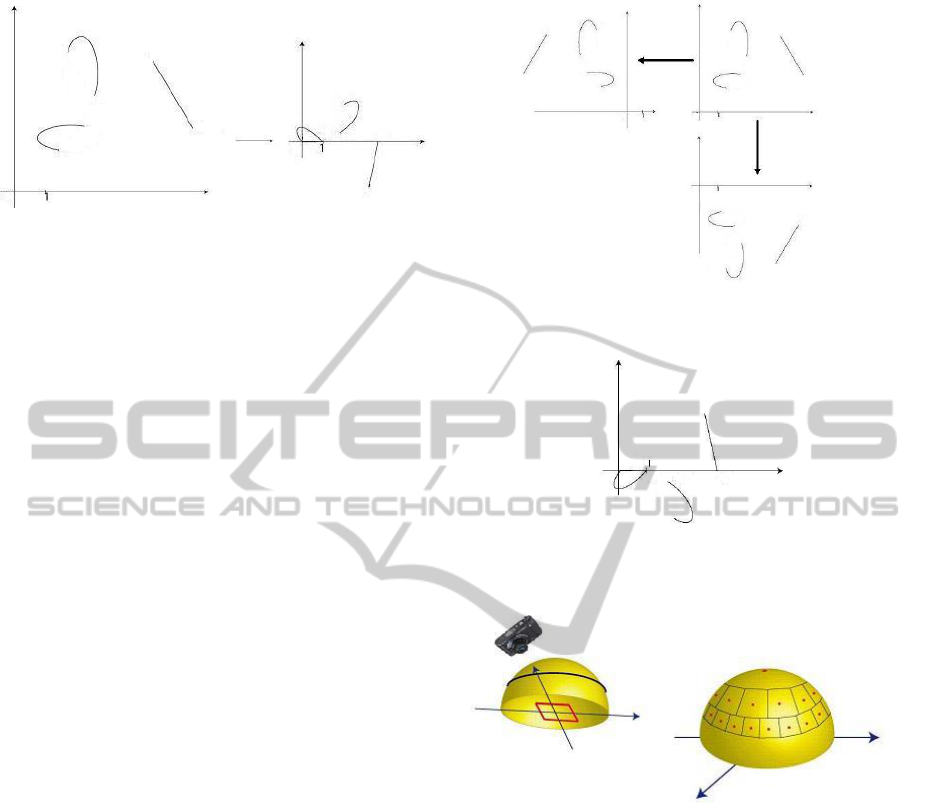
Figure 7: Representation of the endpoints of a combination.
endpoints of the combination showed in the left part
of Figure 7 can be directly read off from the right part
of the figure.
3.6 Reflection Invariance
The rotation, translation, scaling invariant representa-
tion introduced above will be now extended to a re-
flection invariant one. The purpose is to find a rep-
resentation which doesn’t change with the axis of re-
flection. For n ∈ N and diagonal matrix M
n
∈ R
6n×6n
defined as
M
n
=
1 0 . . . 0 0
0 −1 . . . 0 0
.
.
.
0 0 . . . 1 0
0 0 . . . 0 −1
(12)
rotation, translation, scaling and reflection invariant
representation F
5
is defined as
F
5
:
(
C →
S
n∈N
P(R
6n
)
c 7→ {F
4
(c), M
n
(F
4
(c))}
. (13)
In other words the representation consists of two fea-
ture vectors. On the one hand this representation
doesn’t change despite rotation,. . . , reflection. On the
other hand two combinations with identical represen-
tations can be transformed in each other through rota-
tion,. . . , reflection.
An example makes plausible why the additional
vector is invariant to the axis of reflection. Figure
8 shows one combination reflected horizontally and
vertically. Figure 9 shows the identical code of the
endpoints of both reflected combinations.
4 ROBUSTNESS TO
PERSPECTIVE CHANGE
Figure 10 offers a sketch of the rather technical for-
mulation and implementation of the view point tol-
erance of the system. As shown in the left part of
Figure 8: A combination reflected horizontally and verti-
cally.
Figure 9: Representation of endpoints of the reflected com-
binations.
Figure 10: Formulation and implementation of perspective
robustness.
the figure the task is to recognize an object within the
frame if a camera is placed at some point of the sphere
above the dark line and its projection surface is par-
allel to the tangential plane of the point. To model
a camera the perspective projection was used as it is
described e.g. in (Jaehne, 2005).
To solve this task the system builds an in some
sense minimal coverage of the sphere above the dark
line as shown in the right part of the figure. For each
point of the coverage the system makes a perspective
transformation of the original rotation,. . . , reflection
invariant representation and learns it. Albeit storage
intensive this solution is simple and mathematically
precise.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
398
5 THE TASK OF THE
RETRIEVAL ALGORITHM
The storage of the system saves a set A ⊆
S
n∈N
R
6n
of feature vectors representing combinations of half
ellipses not the original combinations.
From an image to analyze the system extracts a set
of half ellipses B ⊆ HE. For each a = (a
i
)
i∈{1,...,n}
∈
A∩R
6n
= A∩
∏
i∈{1,...,n}
R
6
the retrieval algorithm de-
termines maximal m ∈ {1, ...,n} for which a subse-
quence π ∈ {1, ..., n}
{1,...,m}
with π(1) = 1 and b ∈ B
m
exists with
∀i ∈ {1, ..., m} :
a
π(i)
− c
i
max
≤ ε
(14)
with F
4
(b) = c ∈ R
6m
and ε > 0. With other words
two feature vectors get compared with respect to max-
imum norm.
To find such a maximal m ∈ {1, ..., n} the system
tries all m, π, b. The new type of machine learning
algorithm allows to compare each
a
π(i)
i
with each
c = F
4
(b). Thus the task is to find the highest m with
a successful comparison.
ε > 0 can be chosen only once prior to the initial-
ization of the system.
Comparing two feature vectors with respect to
maximum norm the system tolerates deformation of
an object within ε.
6 EXPERIMENTAL RESULTS
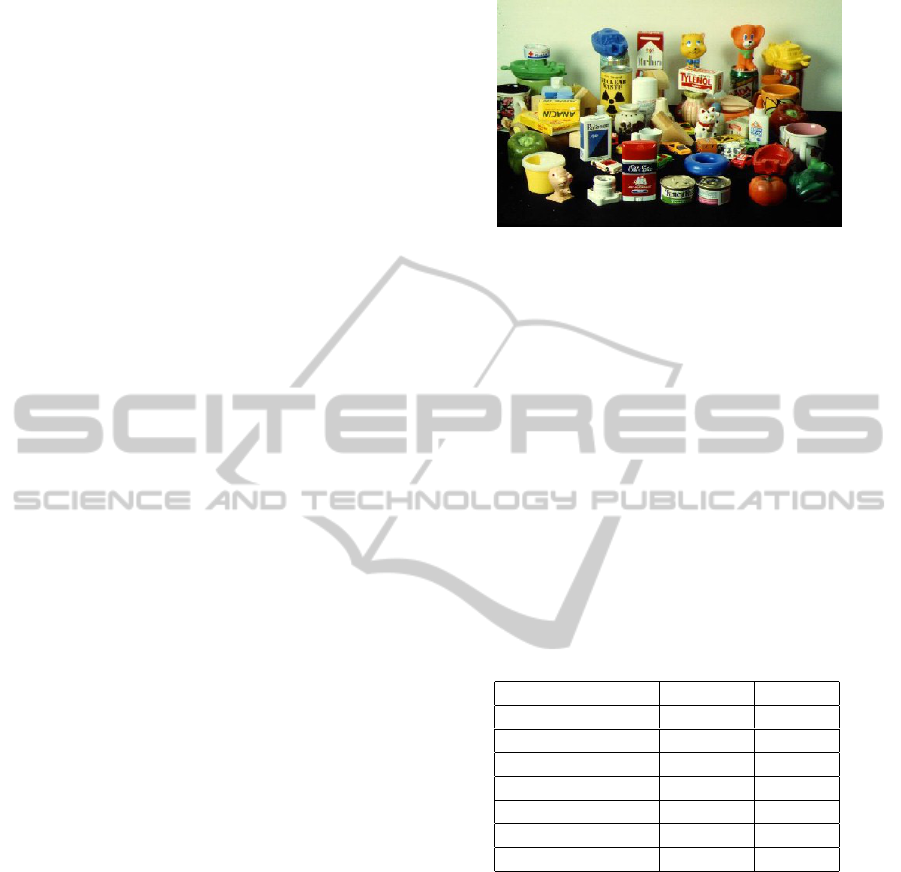
6.1 COIL-100
To evaluate the system the well known
database COIL-100 (Columbia Object Im-
age Library) was used. It is available at
http://www1.cs.columbia.edu/CAVE/software/softlib/
coil-100.php. The data set is described in (Nene
et al., 1996). It contains 7200 color images of 100 3D
objects shown in Figure11. One image is taken per
5
◦
of rotation.
6.2 Experiment Settings and Results
The computer used in the experiments has a proces-
sor Intel(R) Core(TM)2 Duo CPU P8600 @2.40 GHz
2.40 GHz and 4.00 GB RAM. The system is imple-
mented in Java.
There were made 2 experiments with slightly dif-
ferent parameter settings.
In the first experiment 18 views(1 per 20
◦
) were
used to learn each object. The remaining 5400 im-
ages were analyzed. A recognition rate of 99.2% was
Figure 11: COIL-100 objects.
reached. The time demand to learn all objects is 277
seconds. The average time demand to analyze one
image is 980 milliseconds.
In the second experiment 8 views(1 per 45
◦
) were
used to learn an object. The other 6400 were ana-
lyzed. A recognition rate of 96.3% was reached. The
system needs 142 seconds to learn all objects. The
time demand to analyze a single image is 1593 mil-
liseconds.
6.3 Comparison to other Methods
The Table 1 is based on the results described in (Yang
et al., 2000) and (Caputo et al., 2000).
Table 1: Comparison with Alternative Results.
Method 18 views 8 views
LAFs 99.9% 99.4%
Half Ellipses 99.2% 96.3%
SNoW / edges 94.1% 89.2%
SNoW / intensity 92.3% 85.1%
Linear SVM 91.3% 84.8%
Spin-Glass MRF 96.8% 88.2%
Nearest Neighbor 87.5% 79.5%
6.4 Color Information
The pure form representation described above was ex-
tended with color information. A half ellipse has the
first and the last point. Hence it also has the right
and the left side as the Figure12 shows. After the ex-
traction of a half ellipse the system determines arith-
metic RGB average along the right side of the half
ellipse as well as along the left one. Thus it deter-
mines two RGB vectors l, r ∈ R
3
. Color code c ∈ R
6
is just Cartesian product of this two vectors c = (l, r).
A representation vector a ∈ R
6n
of a half ellipse com-
bination b ∈ HE
n
gets extended to ˜a ∈ R
6n+6n
with
color code (c
i
)
i∈{1,...,n}
∈
∏
i∈{1,...,n}
R
6
for each half
ellipse of the combination. An additional threshold
A NEW OBJECT RECOGNITION SYSTEM
399
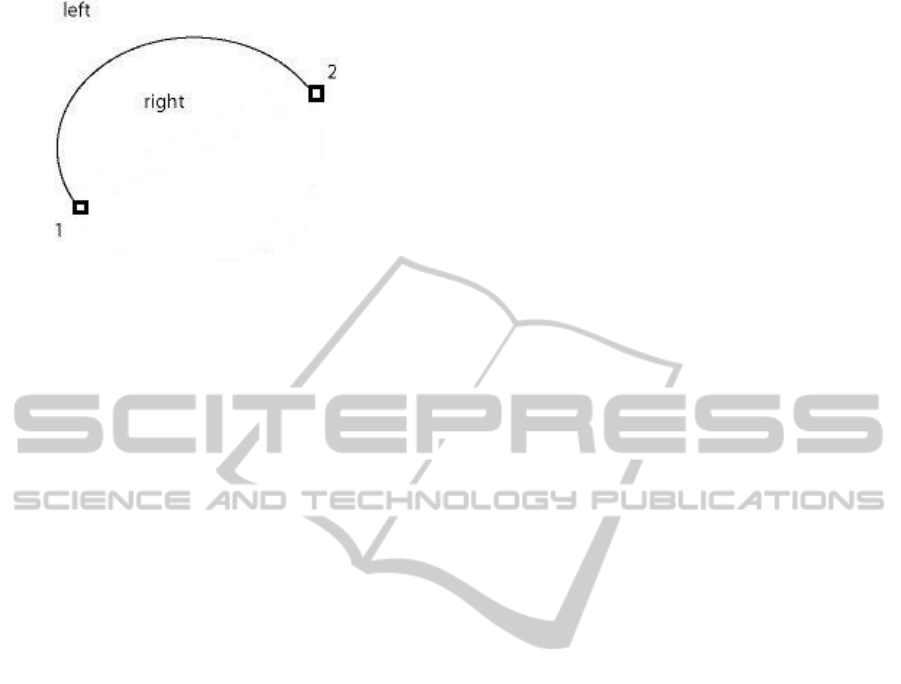
Figure 12: The left and the right side of a half ellipse.
value
˜
ε > 0 is used to compare the color information
of two representation vectors with respect to maxi-
mum norm. An upcoming article explicitly describes
the extraction of half ellipses and its color.
6.5 Learning and Recognition Scheme
used for COIL-100
As mentioned above the system uses e.g. 8 images
to learn an object. For one image it constructs e.g.
10 combinations of half ellipses. Each combination is
represented with e.g 6 feature vectors. Each vector is
labeled with the number N ∈ {1, ..., 100} of the object
it refers to.
Analyzing an image the system at first determines
the maximal length m ∈ N of the matched subse-
quences for each learned feature vector. Let the set
of such lengths be denoted as M. For ˜m = max M
the system depicts all feature vectors for which sub-
sequences of the length ˜m were matched. The ob-
ject with the greatest number of such feature vectors
will be returned as the recognized one. Having sev-
eral such objects the system chooses one of them ran-
domly.
7 SUMMARY AND FUTURE
WORK
The object recognition system presented in this paper
combines several important characteristics. It’s capa-
ble of handling 3D objects. The half ellipse extraction
is at least stable enough to wield COIL-100 images.
The trivial color representation used now has yet
to become illumination invariant. The optimization of
the running time doesn’t appear to be a great problem
as the central retrieval algorithm is highly paralleliz-
able. The greatest challenge seems to be the reduction
of the storage consumption without lost of perspective
robustness.
At the present the authors develop a flow estima-
tor based on the comparison of half ellipse combina-
tions. The flow estimator learns thousands of half
ellipse combinations on the first frame and tries to
match them on the second one. So in a near future
the system could gain an universal character being si-
multaneously capable of object recognition as well as
flow estimation.
REFERENCES
Arbter, K., Snyder, W. E., Burkhardt, H., and Hirzinger,
G. (1990). Application of affine-invariant fourier de-
scriptors to recognition of 3d objects. In IEEE Trans.
Pattern Analysis and Machine Learning.
Bishop, C. (2007). Neural Networks for Patternrecognition.
Oxford University Press.
Canny, J. (1986). A computational approach to edge detec-
tion. In IEEE Transactions on Pattern Analysis and
Machine Intelligence.
Caputo, B., Hornegger, J., Paulus, D., and Niemann, H.
(2000). A spin-glass markov random field for 3d ob-
ject recognition. NIPS 2000.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In IEEE Conference
Computer Vision and Pattern Recognition , San Diego.
Gyofri, L., Kohler, M., Krzyzak, A., and Walk, H. (2002).
A Distribution-Free Theory of Nonparametric Regres-
sion. Springer.
Hough, P. V. C. (1962). Method and Means of Recognising
Complex Patterns. US Patent 3069654.
Hu, M. K. (1962). Visual pattern recognition by moment
invariants. In IRE Transactions on Information The-
ory.
Jaehne, B. (2005). Digital Image Processing. Springer-
Verlag Berlin.
Nene, S. A., Nayar, S. K., and Murase, H. (1996). Columbia
Object Image Library (COIL-100).
Reiss, T. H. (1993). Recognizing Planar Objects Using In-
variant Image Features. Springer-Verlag Berlin Hei-
delberg.
Rosenblatt, F. (1962). Principles of Neurodynamics. Spar-
tan, New York.
Tsuji, S. and Matsumoto, F. (1978). Detection of ellipses by
a modified hough transform. In IEEE Trans. Comput.
Vapnik, V. N. (1998). Statistical Learning Theory. Wiley,
New York.
Yang, M. H., Roth, D., and Ahuja, N. (2000). Learning to
recognize 3d objects with snow. In ECCV 2000.
VISAPP 2011 - International Conference on Computer Vision Theory and Applications
400
