CONTINGENT PLANNING AS BELIEF SPACE SEARCH
Incheol Kim and Hyunsik Kim
Department of Computer Science, Kyonggi University, San 94-6, Yiui-Dong, Youngtong-Gu, 443-760, Kyonggi, Korea
Keywords: Contingent planning, Partial initial condition, Nondeterministic actions, Belief states, Heuristic search.
Abstract: In this paper, we present a new heuristic search algorithm for solving contingent planning problems with the
partial initial condition and nondeterministic actions. The algorithm efficiently searches through a cyclic
AND-OR graph with dynamic updates of heuristic values, and generates a contingent plan that is guaranteed
to achieve the goal despite of the uncertainty in the initial state and the uncertain effects of actions. Through
several experiments, we demonstrate the efficiency of this algorithm.
1 INTRODUCTION
Classical AI planning has the assumption that the
entire initial state is known at planning time, and
each action should deterministically produce an
exact one outcome. A more realistic assumption is
that the planner only knows part of this information
at planning time, the rest must be acquired at plan-
execution time through observations, and each
action may nondeterministically produce any of
several outcomes. Several planning algorithms have
been formulated to address these partially
observable, nondeterministic planning problems
(Ghallab, et al., 2004). Contingent planning
algorithms construct a plan that includes both
sensing actions and conditional execution of the
actions in the plan. In general, contingent planning
can be considered as search in a belief space to find
a solution plan of which all possible different
execution paths beginning from the initial belief
state should end at one of goal belief states. In this
paper, we present a new heuristic search algorithm
for solving contingent planning problems with the
partial initial condition and nondeterministic actions.
The algorithm efficiently searches through a
possibly cyclic AND-OR graph with dynamic
updates of heuristic values, and generates a
contingent plan that is guaranteed to achieve the
goal despite of the uncertainty in the initial state and
the uncertain effects of actions. Through several
experiments, we demonstrate the efficiency of this
algorithm.
(:action sense_door_open
:parameters (?R – robot ?L1 ?L2 - location)
:precondition (and (robot_in ?R ?L1)
(unknown_door_open_between ?L1 ?L2))
:effect (or
(and (not (unknown_door_open_between ?L1 ?L2))
(door_open_between ?L1 ?L2))
(and (not (unknown_door_open_between ?L1 ?L2))
(door_closed_between ?L1 ?L2))))
(:action carry
:parameters (?R - robot ?L1 ?L2 - location ?O - object)
:precondition (and (robot_in ?R ?L1)
(door_open_between ?L1 ?L2)
(object_in ?O ?L1) )
:effect (or (and (not (robot_in ?R ?L1)) (robot_in ?R ?L2))
(grap_object ?R ?O) (not
(object_in ?O ?L1)))
(and (robot_in ?R ?L1))))
(:action move
:parameters (?R - robot ?L1 ?L2 - location)
:precondition (and (robot_in ?R ?L1)
(door_open_between ?L1 ?L2))
:effect (and (not (robot_in ?R ?L1)) (robot_in ?R ?L2)))
(:action put_down
:parameters (?R - robot ?L1 - location ?O - Object)
:precondition (and (robot_in ?R ?L1) (grap_object ?R ?O))
:effect (and (not (grap_object ?R ?O)) (object_in ?O ?L1)))
Figure 1: Domain actions.
2 CONTINGENT PROBLEMS
Planning with incomplete information can be
formulated as a problem of search in belief space,
where belief states can be sets of states.
In this paper, we use the corresponding meta-
predicate formula, (unknown_predicate term
1
, ..,
term
n
) to represent that we do not know whether the
694
Kim I. and Kim H..
CONTINGENT PLANNING AS BELIEF SPACE SEARCH.
DOI: 10.5220/0003288906940697
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 694-697
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
fact (predicate term
1
, …, term
n
) is true or not. A
belief state b is represented as a set of literals,
including some unknown meta-predicate literals. A
deterministic action a
d
is described by a precondition
and an effect. However, a nondeterministic action
a
nd
may have more than one effect. A sensing action
a
s-l
has at least one unknown literal l
unknown
in the
precondition and two different effects including l
true
and l
false
respectively. Figure 1 shows some action
descriptions of the Robot Navigation domain.
The contingent planning problem with both
partial initial condition and nondeterministic actions
is P
pond
= (D, b
I
, b
G
) and the domain is D = (L, B, A),
where L is the set of all known and unknown literals,
B is the set of all belief states, and A=A
d
∪A
nd
∪A
s
is
the set of actions, that includes deterministic,
nondeterministic, and sensing actions. b
I
, b
G
are the
respective initial and goal belief states. Figure 2
shows an example of contingent planning problem
with partial initial condition.
(:init
(robot_in robot l_corridor)
(object_in cup office1)
(unknown_door_open_between conf1 r_corridor)
(unknown_door_open_between lounge r_corridor)
(door_open_between l_corridor office1)
(door_open_between office1 conf1)
. . .
(door_open_between reception r_corridor))
(:goal
(and (robot_in robot reception) (object_in cup reception) ))
Figure 2: A planning problem.
A solution of the given contingent planning
problem P
pond
can be represented as a policy π, the
set of (belief state, actions) pairs, as shown in Table
1.
Table 1: A solution policy.
Belief State Action
(robot_in robot l_corridor) (object_in
cup office1)
(unknown_door_open_between lounge
r_corridor) ...
(move robot l_corridor
office1)
(robot_in robot office1) (object_in cup
office1) (unknown_door_open_between
lounge r_corridor) ...
(carry robot office1
l_corridor cup)
. . . . . .
(robot_in robot lounge) (grap_object
robot cup)
(unknown_door_open_between lounge
r_corridor) ...
(sense_door_open
lounge r_corridor)
. . . . . .
3 HEURISTIC SEARCH
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
AND-OR-Search-Trial(b
0
)
Begin
stateStack.CLEAR();
policyTable.CLEAR();
localHistory.CLEAR();
stateStack.PUSH(b
0
);
While ¬stateStack.EMPTY() do
/* if there remain any unexplored branches */
b = stateStack.POP();
If b.GOAL() then
/* b is a goal state on the end of one branch */
solved = true;
b.VALUE = 0;
valueTable.UPDATE(b, b.VALUE);
localHistory.CLEAR();
continue;
If localHistory.CONTAINS(b) then
/* b is a cycle state, not be included in a solution */
solved = false;
break;
else
localHistory.PUT(b);
If policyTable.CONTAINS(b) then
/* b is already in a partial solution */
localHistory.CLEAR();
continue;
a = b.GREEDY_ACTION();
If a = NULL then
/* b is a dead-end state */
solved = false;
b.VALUE = MAX_VALUE
valueTable.UPDATE(b, b.VALUE);
break;
policyTable.PUT(b, a);
If a is one of sensing actions then
b' = b.P_NEXTSTATE(a); /*a positive state*/
b" = b.N_NEXTSTATE(a); /*a negative state*/
localHistory.CLEAR();
stateStack.PUSH(b');
stateStack.PUSH(b");
b.VALUE = cost(b,a) + 0.5*valueTable.GET(b')
+ 0.5*valueTable.GET(b")
valueTable.UPDATE(b, b.VALUE);
else if a is one of non-deterministic actions then
next_states = b.ND_NEXTSTATE(a);
localHistory.CLEAR();
For each b’ in next_states do
stateStack.PUSH(b’);
b.VALUE = cost(b,a) +
∑
b'∈next_states
valueTable.GET(b') / |next_states|
valueTable.UPDATE(b, b.VALUE);
else if a is one of deterministic actions then
b' = b.NEXTSTATE(a);
stateStack.PUSH(b');
b.VALUE = cost(b,a) + valueTable.GET(b')
valueTable.UPDATE(b, b.VALUE);
End
Figure 3: AND-OR-Search-Trial.
CONTINGENT PLANNING AS BELIEF SPACE SEARCH
695
We propose a heuristic search algorithm for solving
contingent planning problems, called HSCP
(Heuristic Search for Contingent Planning). It
repeats multiple AND-OR-search trials beginning
from the initial belief state until it obtains a complete
solution (i.e., until solved becomes true), as shown
in Figure 4.
1
2
3
4
5
6
7
8
HSCP(bs
0
: initial belief state)
Begin
valueTable.CLEAR();
solved = false;
While solved = false do
AND-OR-Search-Trial(bs
0
);
return (policyTable.GET_POLICY());
End
Figure 4: The HSCP algorithm.
Figure 3 summarizes the AND-OR search trial of
the HSCP algorithm. During AND-OR search trial,
just one candidate of solution subgraphs keeps to be
expanded until its every tip node successfully arrives
at one of goal belief states. Therefore, the AND-OR
search trial is like the heuristic depth-first search that
traverses along every AND branch of the solution
subgraph. The initial value of a belief state b is
assumed to be its heuristic value, h(b). Whenever a
node is selected to be expanded, the value of the
belief state in the node is updated with the values of
its successors. However, HSCP does not
backpropagate value updates over the entire
subgraph. So the AND-OR search trial proceeds fast.
When it meets a dead end state that has no
successors, it sets the value of the state to the infinite
number ∞. If the candidate subgraph is no longer
expanded to be a complete solution, the search trial
fails. And then a new search trial begins again with
the updated value table. With the help of updated
values of the states, the new search trial is able to
expand another part of the AND-OR graph. As the
number of search trials increases, the possibility to
obtain a complete solution also increases. In this
way, HSCP can find a suboptimal solution of the
given contingent planning problem very efficiently.
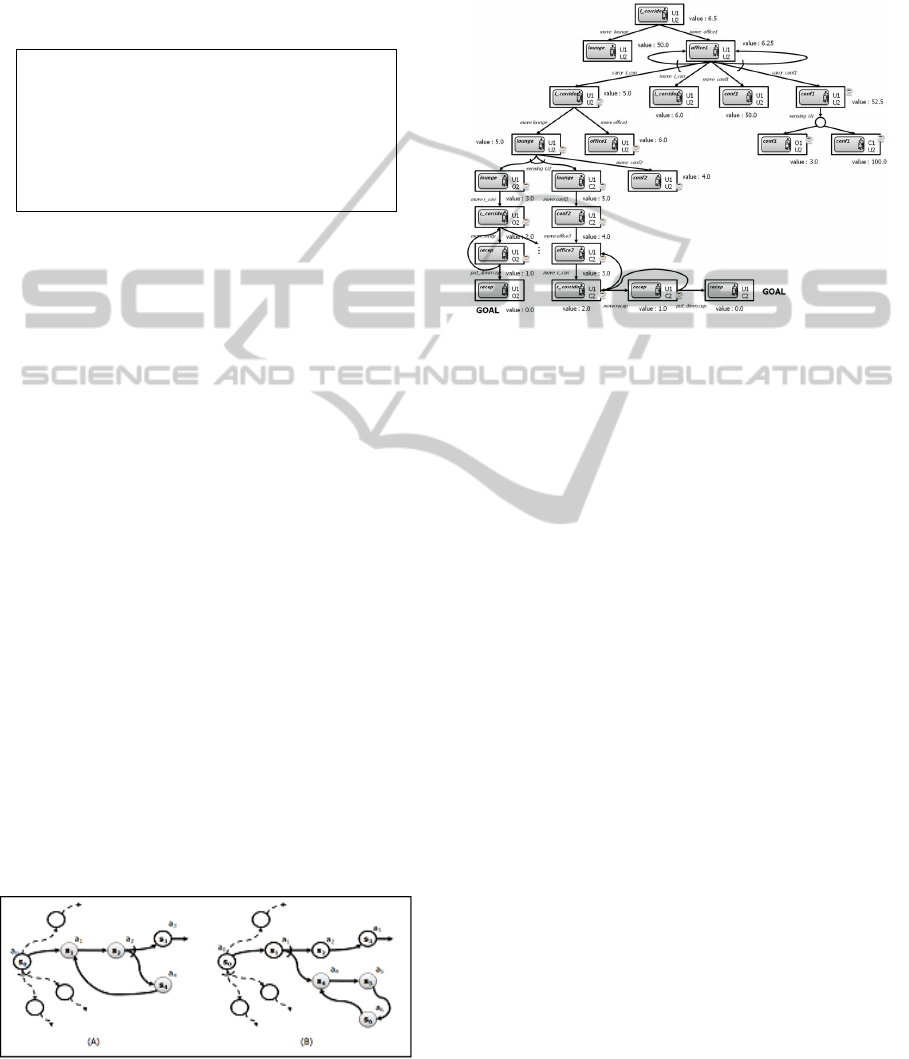
Figure 5: Open and closed cycles.
Our HSCP algorithm can distinguish open cycles
from closed ones. The former has the possibility to
arrive one of goal belief states, but the latter does not.
(A) and (B) in Figure 5 show an open cycle and a
closed cycle, respectively.
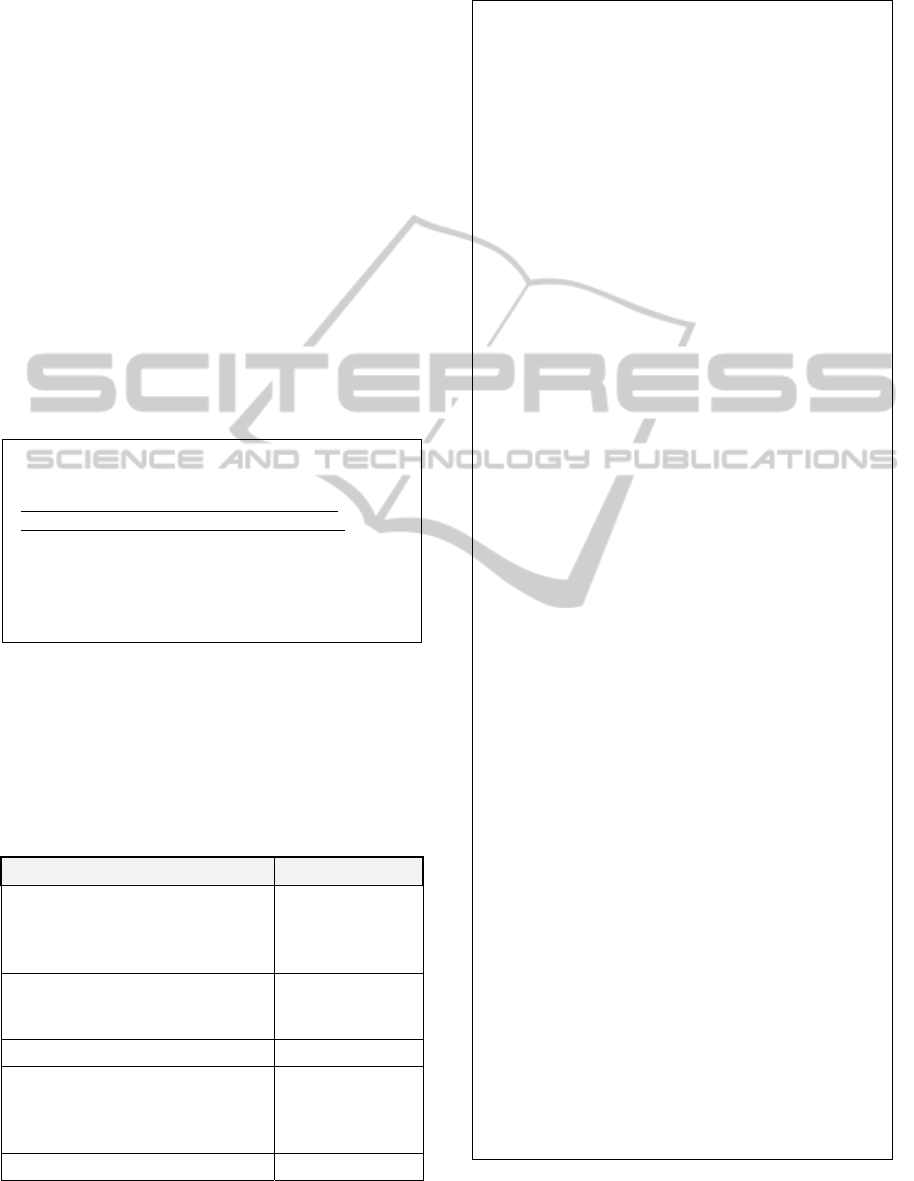
Figure 6: Search space expanded by HSCP.
Figure 6 shows the part of search space expanded by
HSCP for solving the example problem of Figure 2.
4 RELATED WORK
There are several different algorithms for contingent
planning problems: LAO
*
, RTDP, CondFCP, and
ND-FCP. LAO
*
(Hansen and Zliberstein, 2001) is an
extended version of AO
*
, the heuristic AND-OR
search algorithm, so that it can find a solution
subgraph containing open cycles. This algorithm
obtains an optimal solution with just one search trial.
However, during the search trial, it evaluates and
expands multiple candidates of solution subgraphs
simultaneously, and backpropagates value updates
over the entire solution subgraph whenever it gets a
new heuristic value of a tip node. Moreover,
whenever it meets an open cycle, it continues tracing
and value updating along the cycle until every state
nodes in the cycle gets a converged value.
RTDP (Bonet and Geffner, 2003) is a well-
known dynamic programming algorithm for solving
nondeterministic contingent planning problems. It
has two key advantages comparing with other DP
algorithms: first, it obtains an optimal policy without
computing the whole space, second, it has a good
anytime behavior. However, RTDP usually requires a
lot of search trials and value updates, so its
convergence is slow
. CondFCP(Kuter, et al, 2007) is
an extended version of the classical forward-
chaining algorithm for solving planning problems
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
696
with partial initial condition. On the other hand, ND-
FCP(Kuter and Nau, 2004) is an extended one for
solving nondeterministic planning problems. Both
algorithms do just one search trial and expand only
one candidate of solution subgraph during the search
trial. They do not try to update heuristic values with
new information. Therefore, they do not guarantee to
find a solution and cannot be used for solving
contingent planning problems with both partial
observations and nondeterministic actions.
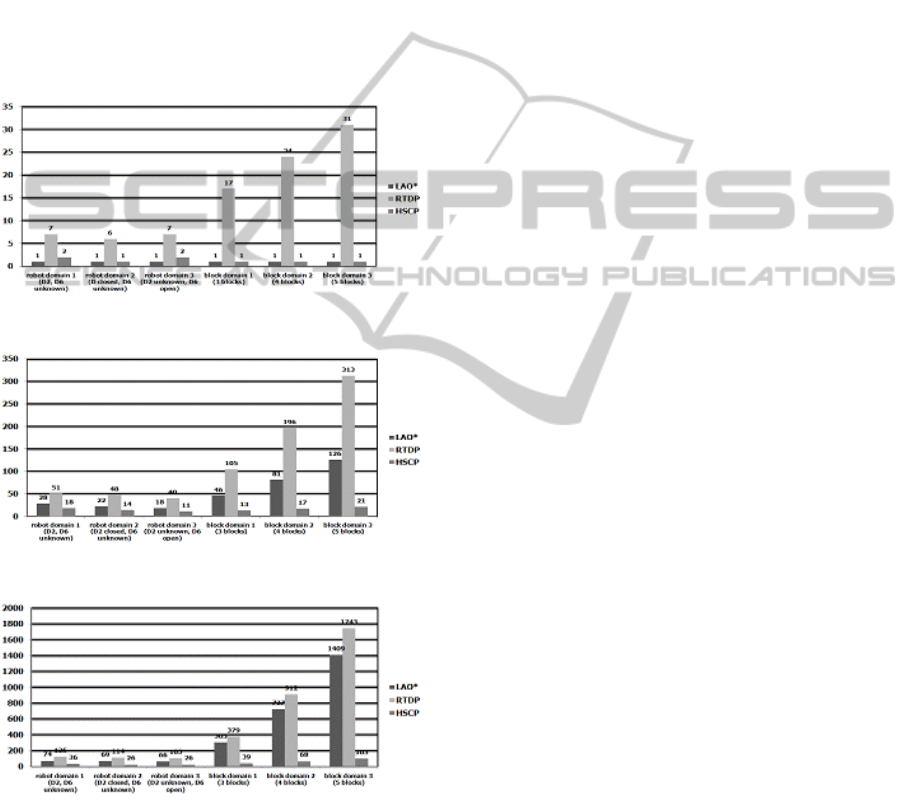
5 EXPERIMENTS
Figure 7: The number of search trials.
Figure 8: The number of value updates.
Figure 9: The number of generated states.
We implemented the HSCP algorithm, and
compared it with LAO
*
and RTDP on two partially-
observable, nondeterministic planning domains that
are well-known from previous experimental studies:
Robot Navigation and Blocks World. Three random
problems were generated from each domain for
experiments. We compared three different search
algorithms in terms of the number of search trials,
the number of value updates, and the number of
generated states. Figure 7 ~ Figure 9 show the
experimental results. While RTDP has performed
lots of search trials to get the optimal values of states,
our HSCP and LAO
*
have done just one or two trials
for each problem. Out of three search algorithms,
RTDP has tried value updates the most, but HSCP
has done the least. Considering the number of
generated states, we find out HSCP has explored
much smaller search space than the other two
algorithms.
6 CONCLUSIONS
We have presented a new heuristic search algorithm
for solving contingent planning problems with the
partial initial condition and nondeterministic actions.
Through several experiments, we have evaluated the
efficiency of this algorithm.
ACKNOWLEDGEMENTS
Industrial Strategic Technology Development
Program (10032108), funded by the Ministry of
Knowledge Economy(MKE, Korea).
REFERENCES
Bonet, B., Geffner, H., 2003. Labeled RTDP: Improving
the convergence of real-time dynamic programming.
In ICAPS’03, 13
th
International Conference on
Automated Planning and Scheduling. AAAI Press.
Ghallab, M., Nau, D., Traverso, P., 2004. Automated
planning: theory and practice, Morgan Kaufmann.
Hansen, E., Zilberstein, S., 2001. LAO*: A heuristic
search algorithm that finds solutions with loops.
Artificial Intelligence, vol. 129, No. 1-2, pp. 35-62.
Hoffmann, J., Brafman, R., 2005. Contingent planning via
heuristic forward search with implicit belief states. In
ICAPS’05, 15
th
International Conference on
Automated Planning and Scheduling. AAAI Press.
Kuter, U., Nau, D., Reisner, E., Goldman, R., 2007.
Conditionalization: Adapting forward-chaining
planners to partially observable environments. In
ICAPS’07, 17
th
International Conference on
Automated Planning and Scheduling. AAAI Press.
Kuter, U., Nau, D., 2004. Forward-chaining planning in
nondeterministic domains. In AAAI’04, 19
th
National
Conference on Artificial Intelligence. AAAI Press.
CONTINGENT PLANNING AS BELIEF SPACE SEARCH
697
