
COOPERATION MECHANISM FOR A NETWORK GAME
Alon Grubshtein and Amnon Meisels
Dept. of Computer Science, Ben Gurion University of the Negev, Beer-Sheva, Israel
Keywords:
Multi agent systems, Self interest, Cooperation, Cost of cooperation.
Abstract:
Many real world Multi Agent Systems encompass a large population of self interested agents which are con-
nected with one another in an intricate network. If one is willing to accept the common axioms of Game
Theory one can assume that the population will arrange itself into an equilibrium state. The present position
paper proposes to use a mediating cooperative distributed algorithm instead. A setting where agents have to
choose one action out of two - download information or free-ride their neighbors’ effort - has been studied
recently. The present position paper proposes a method for constructing a Distributed Constraint Optimization
Problem (DCOP) for a Network Game. The main result is that one can show that by cooperatively minimiz-
ing the constructed DCOP for a global solution all agents stand to gain at least as much as their equilibrium
gain, and often more. This provides a mechanism for cooperation in a Network Game that is beneficial for all
participating agents.
1 INTRODUCTION
A key attribute of any Multi Agent System (MAS) is
the level of collaboration that agents are expected to
adopt. When agents share a common goal it is natu-
ral for agents to follow a fully cooperative protocol.
A common goal can be the election of a leader, find-
ing shortest routing paths, or searching for a globally
optimal solution to a combinatorial problem (Meisels,
2007). When the involved parties (agents) have differ-
ent and conflicting goals, competition and self interest
are the natural behaviors one expects to find.
In its most basic form, a fully cooperative model
involves a set of agents attempting to satisfy or opti-
mize a common global objective. The most important
aspect of such a model is that the actions taken by the
agents do not bring into consideration the impact of
the globally optimal solution on the state of the in-
dividual agent (Maheswaran et al., 2004; Grubshtein
et al., 2010; Meisels, 2007).
In a fully competitive scenario it is common to
assume that participants are only willing to take ac-
tions which improve (or do not worsen) their gains.
In some situations agents can reach an equilibrium
state from which no agents would care to devi-
ate (Roughgarden, 2005; Meir et al., 2010). The effi-
ciency of equilibria states with respect to the global
objective has been studied intensively in the last
decade (Roughgarden, 2005).
The central question that is at the focus of
the present study is the interplay between the self-
interests of agents and their cooperation towards a
common goal. Specifically, towards the increase of
some global gain. A rich and applicable frame-
work for this study is the domain of Network Games
(NGs) (Jackson, 2008; Galeotti et al., 2010). File
sharing and ad hoc P2P networks are good exam-
ples of network games. The existence of a Bayesian
Nash Equilibrium (BNE) for the NG introduced in
Section 2 was shown by (Galeotti et al., 2010). The
present paper proposes a method for securing cooper-
ation among agents in a network game, by guarantee-
ing improved gains to each agent. This approach is
related to former work on Cooperation Games (Grub-
shtein and Meisels, 2010). The proposed method
is based on the construction of an Asymmetric Dis-
tributed Constraints Optimization Problem (ADCOP)
(Grubshtein et al., 2010) from the given network
game and cooperatively solving it.
Former attempts to introduce cooperation into
competitive games fall into several categories. Strong
empirical evidence to the benefits and emergence of
cooperation in the iterated prisoners’ dilemma tour-
nament was reported in (Axelrod, 1984). Petcu et.
al present a cooperative distributed search algorithm
which faithfully implements the VCG mechanism
for the problem of efficient social choice by self-
interested agents in DCOP search (Petcu et al., 2008).
An approach for achieving cooperation among com-
petitive agents is described in (Monderer and Tennen-
336
Grubshtein A. and Meisels A..
COOPERATION MECHANISM FOR A NETWORK GAME.
DOI: 10.5220/0003276303360341
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 336-341
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

holtz, 2009), which introduce mediators to achieve
stronger equilibria among competitive agents.
The present study is unique in proposing a dis-
tributed search method that guarantees the improve-
ment of the personal gain of each agent. It uses the
definition of the Cost of Cooperation (Grubshtein and
Meisels, 2010), which defines a measure of individual
loss from cooperation. It is shown that for a known
family of network games this cost is negative(see sec-
tion 3). That is, a complex real world setting is pre-
sented where one can prove that cooperation produces
better individual gains to all participating agents.
2 DOWNLOAD/FREE-RIDE
NETWORK GAME
Consider a set of users wishing to download large
amounts of information from a remote location. Users
may receive the information from other users in their
local neighborhood (if these neighbors have it) or di-
rectly download it from a central hub. The process
of downloading data from the hub requires signifi-
cant bandwidth and degrades performance (resource
consumption, battery, etc). In contrast, sharing infor-
mation with peers does not result in any significant
impact on the users. Information exchange between
users is limited to directly connected peers only (no
transfer of information to second degree neighbors).
The entire interaction can be captured by a graph
G = (V, E) where each edge e
ij
specifies a neighbor-
hood relationship and a vertex i ∈ V represents a user.
x
i
denotes the action (e.g., assignment) made by user
i, and x
N
(i) is the joint action taken by all of i’s neigh-
bors.
1
The degree of i will be denoted by d
i
.
While the network itself (the graph G = (V, E)) is
not known to all agents, the total number of partici-
pants n = |V| is known and so is the (fixed) probabil-
ity p for an edge to exist between any two vertices.
Such graphs G = (n, p) are known as Poisson Ran-
dom Graphs or an Erd¨os - R´enyi network (Jackson,
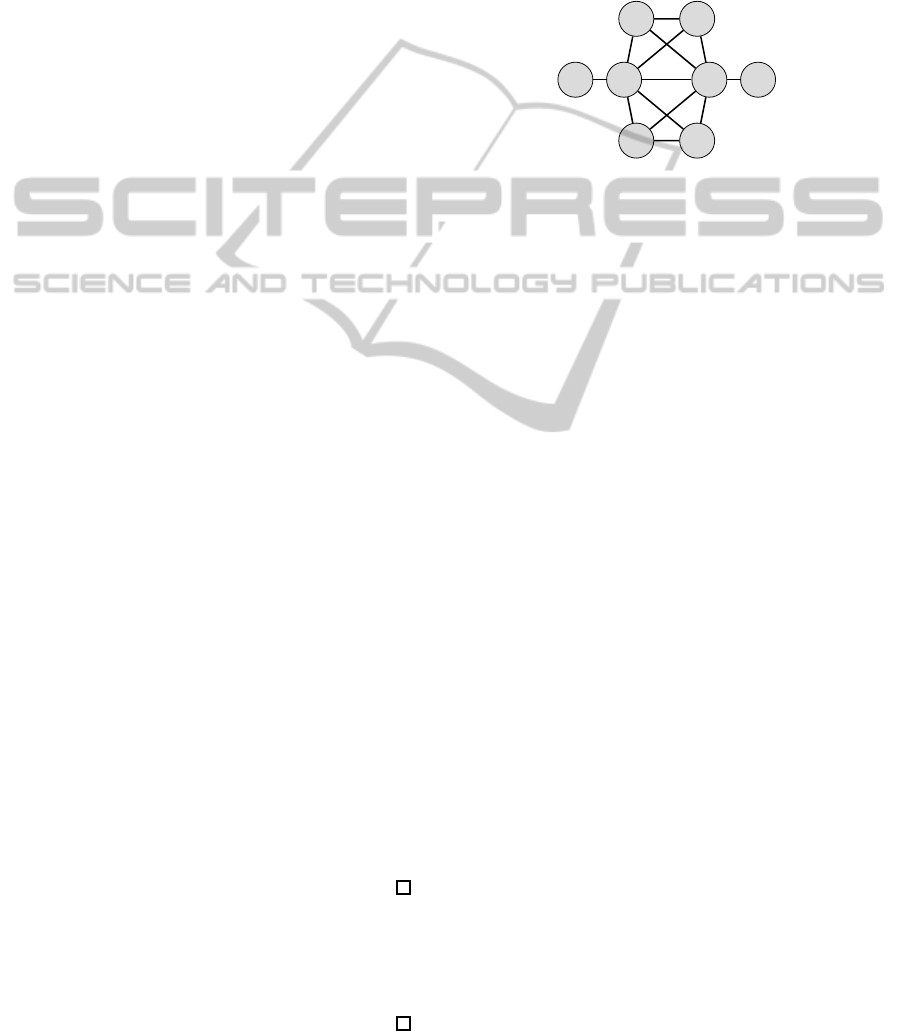
2008). Figure 1 is an example of such a network with
n = 8 and p = 0.45 (8 participants and 13 edges).
For simplicity, the gain from receiving informa-
tion is unity and the cost of downloading it is c.
Users are only aware of their immediate peers and are
known to be self interested. That is, users decide to ei-
ther download the relevant information from the hub
(take action D) or wait for one of their neighbors to
download it (take action F ), and do so in a way which
1
We specifically refrain from the common x
−i
notation
to represent a joint action by all players but i to emphasize
that player i is only affected by the set of her neighbors.
a
1
a
2
a
3
a
4
a
5
a
6
a
7
a
8
Figure 1: An interaction graph with n = 8 and p = 0.45.
maximizes their own utility function:
u
i
(x
i
, x
N
(i)) =
1− c if x
i
= F
1 ∃ j ∈ x
N
(i) s.t x
j
= D
0 otherwise
That is, if the user exerts effort and downloads the in-
formation her gain is 1− c. If, on the other hand, she
does not download but one of her peers does, her gain
is 1. Finally, if neither her nor any of her peers down-
load the information her gain is 0. We assume that the
interaction between users is a one shot interaction (i.e.
users are assumed to be at some decision crossroad).
2.1 The Game Theoretic Approach
As mentioned in section 1, the common approach
taken when self interested entities are present, is to in-
voke Game Theory (Osborne and Rubinstein, 1994).
By accepting the fundamental axioms of game theory
one is able to predict possible outcomes of an inter-
action. These outcomes are standardly assumed to be
equilibrium points (in terms of agents’ actions) from
which no agent is willing to deviate. The best known
solution concept is the Nash Equilibrium (NE) point,
but there are many other equilibrium points which
fit different aspects of the interaction (cf. (Osborne
and Rubinstein, 1994)). For example, in the above
D/F network game the equilibrium concept used is
the Bayesian Nash Equilibrium (BNE). The BNE cap-
tures the incomplete information of all participants
(each knows only its own neighbors).
This is the approach taken in a recent work by Ga-
leotti et. al (Galeotti et al., 2010) for a similar inter-
action. They describe our example of a network game
and cast it to many other types of interactions: vacci-
nate or not, research new technology or wait for the
competitors to do it, etc. In the domain of computer
science one can think of remote rovers belonging to
different agencies exploring the same area, of ad-hoc
network participation, and of P2P networks.
Let us describe the network game that is at the
focus of the present study in more detail. ¿From the
point of view of each participant in the game (i.e. a
user) there are two possible strategies: D (download),
COOPERATION MECHANISM FOR A NETWORK GAME
337

F (free ride). Representing this game by a traditional
n-dimensional matrix is clearly intractable and hence
a graphical game representation is used. A graphical
game (Kearns et al., 2001) is a succinct representation
in which each vertex u represents a party and the set
of edges emanating from it represents its relations to
a subset of the vertices. These vertices are the only
vertices which affect u. When the underlying graph
of a game is the complete graph this representation is
equivalent to the n-dimensional matrix representation.
Although the payoff structure is known to all par-
ticipants, the degrees of neighbors (e.g., their connect-
edness) are unknown. Based on the global probabil-
ity p for an edge, each participant can calculate the
probability for a randomly selected neighbor to be of
degree k:
Q(k; p) =
n−2
k−1
p
(k−1)
(1− p)
(n−k−1)
Galeotti et. al use this information to find a threshold
Bayesian Nash Equilibrium. They define a parameter
t which is the smallest integer such that:
1−
"
1−
t
∑
k=1
Q(k; p)
#
t
≥ 1− c
In the unique BNE that they find for the network
game, any participant of degree k ≤ t selects strategy
D and any participant of degree k > t selects F .
D D
F
F
F
F
F
F
0.3
1
0
0
0.3
0
0
1
Figure 2: The strategies of all participants in the BNE and
the corresponding gains.
For example, consider the graph G = (8, 0.45) il-
lustrated in Figure 1 and a cost value of c= 0.7. From
the above equation we calculate the threshold t = 2.
As a result, in the BNE, a
1
and a
8
will select strategy
D while all others will assign F . The BNE assign-
ments and gains are depicted in Figure 2.
3 COOPERATIVE MECHANISM
FOR SELF INTERESTED
AGENTS
Despite the success game theory has had in many
MAS problems and applications it suffers from two
important drawbacks:
1. It often fails to predict human behavior (e.g., the
iterated prisoners’ dilemma (Axelrod, 1984)).
2. Results are often inefficient (i.e. equilibria points
are not necessarily pareto efficient) (Nisan et al.,
2007).
The former point induces interesting research (of-
ten related to psychology) which may produce new
solution concepts (Halpern and Rong, 2010). The
present paper focuses on the latter point. More specif-
ically, we follow the ideas presented in (Grubshtein
and Meisels, 2010) which define the Cost of Cooper-
ation and Cooperation Games:
Definition 1. An agent’s Cost of Cooperation (CoC)
with respect to a global objective function f(x) is de-
fined as the difference between the lowest gain that
the agent can get in any equilibria of the underlying
game (if any, otherwise zero) and the lowest gain an
agent receives from a (cooperative) protocol’s solu-
tion x that maximizes f(x).
Definition 2. A game is a Cooperation Game (CG) if
there exists a solution for which the CoC (with respect
to some f(x)) of all agents is non positive.
In other words, It is beneficial for all agents to co-
operate in search for an optimal solution, rather then
play their NE strategy (as competitive agents are ex-
pected to act) (Grubshtein and Meisels, 2010).
For a game that satisfies the above two definitions
one can propose a mechanism which will provide the
following guarantee: if all participants agree to fol-
low the mechanism, they are each expected to gain
at least as much as they would have gained had they
played their NE strategy.
The present study focuses on Network Games and
on the D/F game in particular. The main result of
the paper is a proof that the D/F game is a Coop-
eration Game (CG). This enables a clear mechanism
that solves a generated Asymmetric DCOP (ADCOP)
(Grubshtein et al., 2010) and can act as a natural
choice of strategy for all participants of the game. An
ADCOP is an extension to the DCOP paradigm which
addresses individual agent’s gains and captures game-
like interactions between agents. An ADCOP can be
viewed as a form of a cooperative graphical game.
The proposed framework for the mechanism
makes the distinction between users and agents.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
338
When referring to users one refers to self interested
entities seeking to maximize their gain. Each of the
users employs an agent - an application entity which
follows a cooperative protocol on the one hand, but is
expected to faithfully represent its user’s preferences.
In the proposed setting agents represent the users, but
are not under the users’ direct control (i.e. users’ en-
trust the agents with the ability to choose for them, but
are unable to control or affect the agents’ decisions).
An important feature of the proposed approach
is its inherent cooperation. The desired solution it
seeks is not necessarily a stable one in the game the-
oretic sense. Nonetheless, rational, self interested
users would rather let their agents choose an action
for them knowing in advance that agents’ cooperation
will yield results which are at least as good as they
would get if they play selfishly.
The distributed cooperativeprotocol for the agents
which will provide the above guarantee to the users
solves the following ADCOP:
• A set of Agents A = {a
1
, a
2
, ..., a
n
} - each holds a
single variable and corresponds to a user.
• A set of Domains D = {D
1
, D
2
, ..., D
n
} for the
variables held by the agents. Each domain con-
sists of only two possible values: {D, F }.
• A set of asymmetric constraints C. Each con-
straint c
i
is identified with a specific agent (e.g.
agent i) and defined as a (d
i
+ 1)-arity constraint
acting over all of agent’s i neighbors. The set of
agents involved in constraint c
i
is A
c
i
= a
i
∪x
N
(i).
That is, the ADCOP has n constraints and each
agent contributes to d
i
+ 1 different constraints.
The costs associated with each constraint that add
up to the total cost of c
i
for agent i are summarized
in the table in Figure 3.
Costs of c
i
n
3
if ∀a
j
∈ A
c
i
, x
j
= F
(all agents of the constraint assign F )
d
j
for each a
j
∈ A
c
i
with d
j
> t and
∀a
k
∈ x
N
( j), d
k
> t that assign x
j
= D
(n− 1)n
for each a
j
∈ A
c
i
with d
j
> t and
∃a
k
∈ x
N
( j), d
k
≤ t that assign x
j
= D
1
for each a
j
∈ A
c
i
with d
j
≤ t
which assigns x
j
= D
Figure 3: The constraint’s costs for each combination of
assignments.
Note: costs of the DCOP’s solutions (full or partial)
are completely unrelated to the agents’ gains.
Let us now proceed to prove that finding a mini-
mal assignment (an optimal solution) for the ADCOP
results in gains which are at least as high as the actual
gains resulting from the BNE, for all agents .
Let the optimal solution to the ADCOP be denoted
with x. We use the term null neighborhood to define
a situation in which an agent and all of its directly
connected peers assign F as their action.
Lemma 1 (No null neighborhoods). In the optimal
solution to the ADCOP there exists at least one agent
in the local neighborhood of each agent which assigns
D (specifically, the agent itself can assign D).
Proof. Assume by negation that there exists an agent
a
i
with a null neighborhood in x. This means that the
cost of c
i
(the constraint originating from a
i
) is n
3
. Let
x
′
be a complete assignment which differs from x in
the assignment of an agent a
j
∈ c
i
. That is, x
′
j
= D.
As a result the previously null neighborhood of a
i
in
x is not part of x
′
.
One can compute an upper bound on the cost of
x
′
by assigning this change to an agent a
j
with d
j
=
n−1 (where n−1 > t) which has at least one neighbor
a
k
∈ x
N
( j) of degree d
k
≤ t (i.e. a
j
appears in all n
constraints of the problem). The resulting cost of x
′
:
COST(x
′
) = COST(x) − n
3
+ (n− 1)n
2
= COST(x) − n
2
which implies that COST(x
′
) < COST(x) in contra-
diction to the optimality of x.
An important implication of Lemma 1 is that in
the optimal solution to the ADCOP none of the agents
receive a payoff of 0.
Lemma 2. The gain of agents a
i
with degree d
i
≤ t in
x is at least as high as its gain in the BNE.
Proof. In the BNE a
i
’s gain is exactly 1-c (d
i
≤ t and
hence a
i
assigns D). The only possible lower gain
is 0. However, this is the gain of an agent with a
null neighborhood and hence (following Lemma 1)
its gain must be at least 1-c when cooperating (either
it will assign D or one of its peers will).
Lemma 3. The gain of agent a
i
with degree d
i
> t in
x is at least as high as its gain in the BNE.
Proof. Due to its degree, a
i
’s BNE gain is never1−c.
When all its neighbors a
j
∈ x
N
(i) are of degree d
j
> t
its BNE gain is 0, and when at least one neighbor is
of degree d
j
≤ t its BNE gain is 1. Since the ADCOP
gain is always higher than 0 (Lemma 1) we only con-
sider the case when a
i
’s gain is 1 in the BNE. This is
only attainable when a
i
has at least one neighbor a
j
with degree d
j
≤ t. Thus, to conclude our proof we
have to show that a
i
’s ADCOP gain is not 1− c.
By the problem description this gain can only oc-
cur when a
i
assigns D in x. This assignment incurs a
COOPERATION MECHANISM FOR A NETWORK GAME
339
positive contribution on the ADCOP only when it pre-
vents the existence of a null neighborhood for a
i
, or
when it prevents it for one (or more) of a
i
’s neighbors.
If a
i
has a null neighborhood which it would like
to prevent, there must be a neighbor a
j
∈ x
N
(i) (with
degree d
j
≤ t) which assigns F in the ADCOP. In this
case we define a new solution x
′
, which differs from
x in the assignments of a
i
and a
j
(i.e., x
′
i
= F and
x
′
j
= D). x
′
’s cost is:
COST(x
′
) = COST(x) − (d
i
+ 1)(n − 1)n + d
j
The highest cost x
′
can take will be when d
i
= 1 and
d
j
= n− 1 in which case:
COST(x
′
) = COST(x) − 2(n − 1)n + (n − 1)
= COST(x) − (n− 1)(2n− 1)
implying that a
i
does not assign D to prevent a local
null neighborhood in the optimal solution.
When a
i
assigns D to prevent the existence of a
null neighborhood for one of its neighbors, we clas-
sify the neighbor’s type:
1. The neighbor a
j
has at least one neighbor a
k
with
degree d
k
≤ t. We generate the assignment x
′
in
which x
i
= F and x
k
= D. As before the cost of x
′
is lower than that of x since a
k
contributes a single
unit per each constraint it is involved in (at most n
units) whereas the assignment change of a
i
lowers
the cost by at least (n− 1)n units in contradiction
to the optimality of x.
2. The neighbor a
j
has no neighbor a
k
with degree
d
k
≤ t. Assigning x
j
= D and x
i
= F to a
i
lowers
the resulting cost since the contribution of a
j
to
the cost is bounded by n
2
(it incurs a cost of d
j
to each of the d
j
+ 1 constraints it is involved in),
whereas the gain from changing the assignment of
a
i
is (d
i
+ 1)(n − 1)n.
This means that even if all neighbors are of the sec-
ond type (which always incur greater costs), and they
are all connected to all other agents, the cost of the
modified solution is:
COST(x
′
) =COST(x)−(d
i
+1)(n−1)n+d
i
·n(n−1)
Hence we conclude that that the gain of a
i
will not
be reduced from 1 in the BNE to 1 − c (or 0) in the
ADCOP’s optimal solution.
Theorem 1 (Gain guarantee). The optimal solution
to the ADCOP described above results in gains which
are at least as high as those achieved in the BNE.
Proof. Directly follows from Lemmas 1-3.
Figure 4 demonstrates the results of applying and
solving the ADCOP on our previous example. Agents
a
3
, a
4
, a
5
and a
6
assign F and do not incur any cost.
Agent a
1
and a
8
incur a cost of 1 to c
1
and c
3
(to c
6
and c
8
in case of a
8
) and agents a
2
and a
7
incur a
cost of 3 (their degree) to the 4 constraints they are
involved with (c
2
, c
3
, c
5
, c
6
and c
3
, c
4
, c
6
, c
7
) resulting
in a cost of 28.
D D
D
D
F
F
F
F
0.3
1
0.3
1
0.3
1
0.3
1
Figure 4: Strategies of all participants in the ADCOP and
the corresponding gains. Red indicates higher gains than
those received in the BNE.
Note that the ADCOP’s solution dictates an as-
signment in which 4 agents (namely a
2
, a
5
, a
6
and a
7
)
increase their gain. None of the agents gained less
than their BNE gain depicted in Figure 2.
4 DISCUSSION
In a general combinatorial problem, maximizing the
total sum of gains (also known as a “utilitarian”
scheme, or the social choice) provides no guarantees
to the individual participant. Depending on the nature
of the problem, achieving the optimal social solution
requires that some participants agree to an extremely
low gain (Moulin, 1991). On the other hand, the
equilibrium solution suggested by Game Theory for
problems involving only self interested parties may
be greatly improved when agents cooperate (e.g., the
“prisoners’ dilemma” (Axelrod, 1984; Monderer and
Tennenholtz, 2009)).
The present paper proposes a cooperative, qual-
ity guaranteeing framework to overcome this prob-
lem. The proposed framework and mechanism are
proven to provide strong guarantees for a general net-
work game (the Download/Free-ridegame) which can
be cast into many diverse applications.
In the proposed framework, agents acting on be-
half of users adopt a cooperative behavior (coopera-
tively solve an ADCOP) to achieve a solution which
pareto dominates the Bayesian Nash Equilibrium.
Thus, users are always expected to gain at least as
much as in the BNE. One of the benefits of this ap-
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
340

proach is that it justifies the use of cooperative algo-
rithms as mechanisms for instances where the Nash
Equilibrium is not readily known.
The state of a Network Game in which agents do
not fully know the whole network is natural to a dis-
tributed scenario in which information is often local.
The analogous situation in ADCOPs is one in which
agents only communicate with their neighbors during
search and are not aware of more remote agents. The
corresponding family of distributed search algorithms
(local search algorithms) are not guaranteed to find
optimal results but may be scaled to large populations
of agents (Grubshtein et al., 2010; Maheswaran et al.,
2004; Zhang et al., 2005).
It is not clear that our previous guarantee can be
satisfied in a setting where agents employ a local
search algorithm: Consider the interaction of Fig-
ure 1 and a set of agents participating in a stochastic
search (Zhang et al., 2005). The initial assignment
of all agents is F . As a result, all agents consider a
change of assignment to D in the next round. Specifi-
cally, Agents A
3
and A
8
may change their assignments
while the rest of the agents stochastically avoid any
change. The resulting solution is a local minima from
which agents will not deviate (similar to an equilibria
from which users will not deviate). In this converged
solution our guarantee is violated - agent A
3
’s gain is
reduced from 1 to 1−c. Nonetheless, a simple manip-
ulation to distributed hill climbing algorithms such as
MGM (Maheswaran et al., 2004) can result in solu-
tions which provide the desired guarantee.
The framework and methods proposed in the
present position paper form a mechanism that enables
the self driven desires and goals of users to be solved
by a cooperative system of computerized agents. We
believe that this is a natural mechanism for many
user applications which interact with their environ-
ment and with other users. In such settings, coop-
eration between agents is the natural action only if it
can provide a strong and realistic guarantee regarding
the expected gain to each user. A guaranteed nega-
tive CoC provides a suitable incentive for cooperation
- securing a gain which is at least as high as the worst
possible gain attained by the user.
ACKNOWLEDGEMENTS
This work was supported by the Lynn and William
Frankel center for computer science and the Paul
Ivanier Center for Robotics.
REFERENCES
Axelrod, R. (1984). The evolution of cooperation. Basic
Books, New York.
Galeotti, A., Goyal, S., Jackson, M. O., Vega-Redondo, F.,
and Yariv, L. (2010). Network games. Review of Eco-
nomic Studies, 77(1):218–244.
Grubshtein, A. and Meisels, A. (2010). Cost of coopera-
tion for scheduling meetings. Computer Science and
Information Systems (ComSIS), 7(3):551–567.
Grubshtein, A., Zivan, R., Meisels, A., and Grinshpoun,
T. (2010). Local search for distributed asymmet-
ric optimization. In Proc. of the 9th Intern. Conf.
on Autonomous Agents & Multi-Agent Systems (AA-
MAS’10), pages 1015–1022, Toronto, Canada.
Halpern, J. Y. and Rong, N. (2010). Cooperative equilib-
rium (extended abstract). In Proc. of the 9th Interna-
tional Conference on Autonomous Agents and Multia-
gent Systems(AAMAS 2010), Toronto, Canada.
Jackson, M. O. (2008). Social and Economic Networks.
Princeton University Press.
Kearns, M. J., Littman, M. L., and Singh, S. P. (2001).
Graphical models for game theory. In UAI ’01: Proc.
of the 17th Conf. in Uncertainty in Artificial Intelli-
gence, pages 253–260.
Maheswaran, R. T., Pearce, J. P., and Tambe, M. (2004).
Distributed algorithms for DCOP: A graphical-game-
based approach. In Proc. Parallel and Distributed
Computing Systems PDCS), pages 432–439.
Meir, R., Polukarov, M., Rosenschein, J. S., and Jennings,
N. (2010). Convergence to equilibria of plurality vot-
ing. In The Twenty-Fourth National Conference on
Artificial Intelligence (AAAI’10).
Meisels, A. (2007). Distributed Search by Constrained
Agents: Algorithms, Performance, Communication.
Springer Verlag.
Monderer, D. and Tennenholtz, M. (2009). Strong mediated
equilibrium. Artificial Intelligence, 173(1):180–195.
Moulin, H. (1991). Axioms of Cooperative Decision Mak-
ing. Cambridge University Press.
Nisan, N., Roughgarden, T., Tardos, E., and Vazirani, V. V.
(2007). Algorithmic Game Theory. Cambridge Uni-
versity Press.
Osborne, M. and Rubinstein, A. (1994). A Course in Game
Theory. The MIT Press.
Petcu, A., Faltings, B., and Parkes, D. (2008). M-DPOP:
Faithful distributed implementation of efficient social
choice problems. Journal of AI Research (JAIR),
32:705–755.
Roughgarden, T. (2005). Selfish Routing and the Price of
Anarchy. The MIT Press.
Zhang, W., Xing, Z., Wang, G., and Wittenburg, L. (2005).
Distributed stochastic search and distributed break-
out: properties, comparishon and applications to con-
straints optimization problems in sensor networks. Ar-
tificial Intelligence, 161:1-2:55–88.
COOPERATION MECHANISM FOR A NETWORK GAME
341
