
AGENT-BASED COMPUTER-GENERATED-FORCES’
BEHAVIOUR IMPROVEMENT
Mike Bourassa, Nacer Abdellaoui
Defence R&D Canada Ottawa, 2701 Carling Avenue, Ottawa, (K1A-0Z4), Ontario, Canada
Glen Parkinson
Xplornet, 2835 Ashton Station Road, Ottawa, (K0A-1B0), Ontario, Canada
Keywords: Artificial intelligence, Agent-based, Computer generated forces, Computer generated actors, Maslow’s
hierarchy of needs, JADE, Synthetic environment, Modeling and simulation.
Abstract: This paper captures the initial stages of a research project into improving the decision making performance
of simulated entities in Computer Generated Forces (CGF) software applications. To date, the decisions
made by Artificial Intelligence (AI)-enhanced synthetic entities have demonstrated a limited ability to react
to changes in the synthetic environment, to use sensor data as effectively as a human operator, or in general
to impact the synthetic environment in a comparable manner to a human operator. This paper presents a
survey of AI in both the video gaming industry and academic circles leading to the proposal of a new agent
architecture that combines a traditional agent architecture with a psychological framework (Maslow’s
Hierarchy of Needs) leading to the specification of a “Needs-based” agent. This paper also captures the
initial design decisions on the construction of a prototype and identifies candidate technologies to advance
the research to the next phase. It is proposed that by combining the cognitive elements of the psychological
framework with the behavioural emphasis of agents, synthetic entities in military and non-military
simulations can produce better decisions and therefore exhibit more realistic behaviour which by ricochet
will require less human intervention in simulation executions.
1 INTRODUCTION
Simulation is a promising technology to prepare for
a world of uncertainty, to acquire skill, or study
alternatives. The Computer Generated Forces
(CGFs) systems are the cornerstone of constructive
simulations and an efficient way of providing extra
players in a synthetic environment containing human
participants. They are a viable alternative in
experimentation, concept analysis and development,
tactics development, and training. Existing CGFs are
adequately designed for the symmetric mindset and
well adopted to the Cold War era where all forces
act according to Standard Operating Procedures
(SOPs). With the fourth generation, non-kinetic
warfare, and asymmetric warfare; SOPs are hardly
ever followed to the letter, making current CGF
systems increasingly inadequate. One of the key
drawbacks of existing CGF systems is the lack of
adequate representation of human influences such as
perception, reasoning, decision making, or what is
recognized as lack of Artificial Intelligence (AI). A
comparative analysis about AI capabilities in CGFs
concluded that these capabilities are very limited and
recommended the realisation of a complementary AI
component that should operate with existing CGFs.
Also, the literature search that examined AI
approaches for the video game industry and
academia (Bourassa and Massey, 2009) and the AI
in CGFs preliminary analysis (Taylor et al., 2009)
identified software Agents as a promising
technology to improve CGF entities’ AI.
The goal of this paper is to evaluate the software
agent system as a potential platform for enhancing
the AI capability of CGF systems and to propose an
agent based system to adequately represent human
influences within CGFs, leveraging from academia
research and video gaming technology.
273
Bourassa M., Abdellaoui N. and Parkinson G..
AGENT-BASED COMPUTER-GENERATED-FORCES’ BEHAVIOUR IMPROVEMENT.
DOI: 10.5220/0003187002730280
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 273-280
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
2 ARTIFICIAL INTELLIGENCE
IN COMPUTER GENERATED
FORCES
CGF entities are known in the gaming industry and
academia as the Non-Player Characters (NPC) or
Computer Generated Actors (CGA). While a certain
amount of AI is built into most CGFs, it has
historically been quite rudimentary, leading to the
need for human intervention to achieve realistic
behaviour. The purpose of this project is to find a
methodology to improve the AI capability of any
CGF and thereby reduce the level of human
involvement in simulation executions. The goal of
defining the artificial intelligence (AI) approach for
the control of CGF entities began with a literature
search. This examined AI approaches for both the
video game industry and academia; which led to the
exploration of agent-based systems and cognitive
architectures, and the selection of agent-based
systems for future consideration. Based on this
decision, types of agent architectures were reviewed
and found wanting, leading to the development of a
hybrid agent concept based on “needs”.
2.1 Literature Search
The conclusions of the literature search (Bourassa
and Massey, 2009) were surprising. The video
gaming industry at the time of writing did not prove
to be a good source of guidance for AI that exhibits
realistic behaviour. The focus in the gaming industry
is on a positive player experience not necessarily a
realistic one. A positive experience is created by
devoting a significant share of computer resources to
impressive graphics and ensuring challenging but
winnable games. AI is relegated a very small
percentage of processing time. In fact, true AI
implementations in games are rare because it is
possible to make CGAs appear intelligent by
allowing fast reaction times, providing clever
scripting, and giving CGAs access to information
the player does not have. As a result, academia
remains the principal forum in AI development. The
literature search traced the progress of academic AI
research from the early attempts at symbolic logic
solutions through machine learning approaches and
finally to agent paradigms. All of the approaches
have had some success but none have been adopted
as general solutions to implementing AI in games.
The agent paradigm had considerable success in
many fields and is an intuitive way to conceive
CGAs; therefore, it was decided to use an agent
approach in this work.
2.2 Cognition
In order to implement a mapping of perceptions to
actions (i.e. behaviour), we chose to use an "agent"
paradigm. The agent is a combination of architecture
and software that encapsulates autonomy (mapping
perceptions to actions) and communication. The
architecture defines the interaction with the chosen
environment, while the software defines the nature
of that interaction. An agent does not in and of itself
address AI. Software agents are used in network
centric architectures without any AI or general
intelligence. Since cognition must be built into an
agent, it is important to understand the nature of
cognitive architectures to appreciate the limitations
inherent in existing agent paradigms. This section
addresses historic approaches to cognition and
agents.
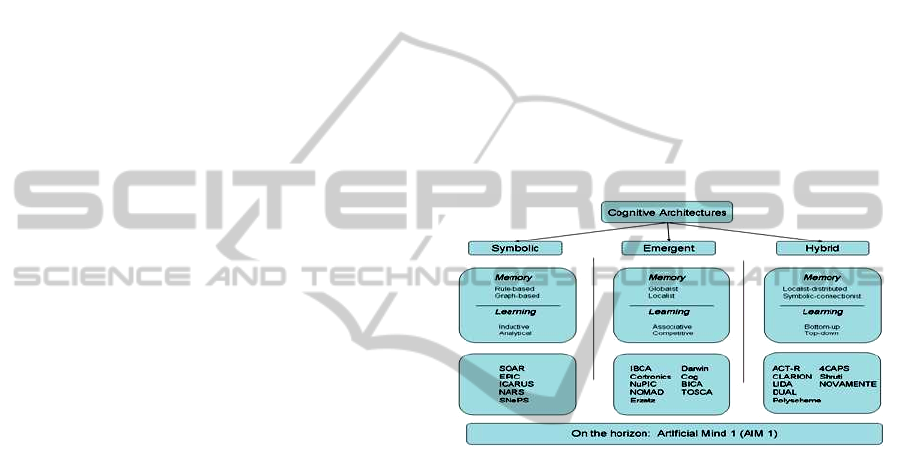
Figure 1: Simplified Taxonomy of Cognitive
Architectures.
Duch (Duch et al., 2008) outlined a taxonomy of
cognitive architectures (Figure 1). The main headers
(symbolic, emergent, hybrid) reflect the evolution of
cognitive architectures. The symbolic group typified
by State, Operator and Results (SOAR) is very much
a first order logic approach to cognition. The
emergent group use approaches inspired by
connectionist principles seeking to replicate brain
functionality by modeling brain components (e.g.
CORTRONICS models the biological functions of
the thalamocortex in the human brain) or mimicking
them through machine learning techniques (e.g.
neural networks). Finally, the hybrid approaches try
to combine symbolic and emergent techniques
hoping to build on the strengths of the two. Adaptive
Components of Thought – Rational (ACT-R)
(Anderson, 1993) seems to be the most well-known
of the current hybrid techniques.
The literature search found none of the preceding
cognitive architectures has been successfully
integrated into games. The principal problem is
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
274
likely that these architectures are meant to represent
a single entity and cannot be scaled up to a multi-
entity game. To be represented in a general and
suitable manner; simpler approaches must be
considered and therefore our focus on agents.
2.3 Agents and Behaviour
A CGA agent is intended to exhibit behaviour that
approximates that which a human player would
expect from another human player. In the CGF
context, a human player should not be able to
discern whether his opponent is a non-player
character (NPC) or another human. There are several
agent architectures available for consideration
(Russell and Norvig, 2003). These are simple reflex,
model-based and goal/utility-based agent
architectures. Each of these agent architectures
receives information about the environment through
“Sensors” and alters the environment with
“Actuators”. The difference between the various
agent architectures is in the internal processing of
the agent.
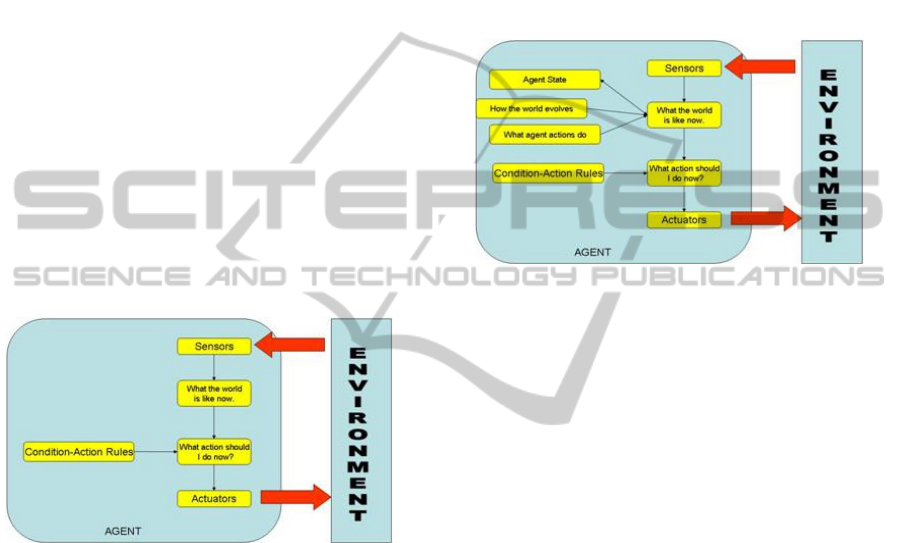
Figure 2: Simple reflex Agent Architecture.
Figure 2 illustrates the Simple Reflex Agent
architecture. It receives information through the
sensors and assesses the state of the environment
based solely on the immediate sensor data. This
architecture has no memory. Based on the
immediate condition of the environment as
measured by the sensors, it selects the appropriate
actions and triggers the necessary actuators. These
condition-action rules are usually implemented in
the form of “if..then..” statements, decision trees, or
a table of actions. Recent developments do however
allow for the dynamic construction of decision trees
to plan appropriate actions.
This type of architecture is moderately successful
for low-level behaviours and is the standard for
many current (and most past) agent implementations
in the video game industry. The problem with this
architecture is that the size of the condition-action
table is a function of the number of the variables.
Similar to symbolic cognitive architectures, this
means that one must define all possible states and
outcomes. This makes the simple reflex agent
realizable only when the environment is specified by
a limited number of variables. Finally, note that the
only world model contained in the agent is the one
implicit in the rules. That is, the rules are based on a
world model known to the creator of the rules. The
agent cannot create new rules or modify existing
ones.
Figure 3: Model-based Reflex Agent.
The Model-based Reflex Agent architecture
(Figure 3) tries to form a more complete picture of
the world rather than just the raw sensor inputs.
Model-based agents incorporate a sense of how the
world evolves. In considering any future action, this
architecture considers both the present state of the
agent and the possible impact of any action on the
world. The Model-based architecture comes closer
to the ideal of autonomy (and to cognitive
architectures) than the simple reflex agent by having
this 'understanding' of the state of the world and the
ability to track changes to this understanding. Even
in the case of a partially observable world, Model
based agents may be able to infer state information
not directly observable. In this sense, such agents
can recall the past and infer the future state of the
environment. This allows for a process of learning,
which is a prerequisite to achieving autonomy
(Russell and Norvig, 2010). The challenges in
creating such agents are in the implementation of
capturing the dynamics of the world, determining
the influence of actions on the world state, and
establishing the mechanism and nature of agent
learning. Any agent that depends on rules potentially
faces the challenges of scalability seen with simple
reflex agents.
Goal and Utility-based architectures (Figure 4
and Figure 5) extend the paradigm of the Model
based architecture. Both have some knowledge of
the world and how it evolves; however, the
AGENT-BASED COMPUTER-GENERATED-FORCES' BEHAVIOUR IMPROVEMENT
275
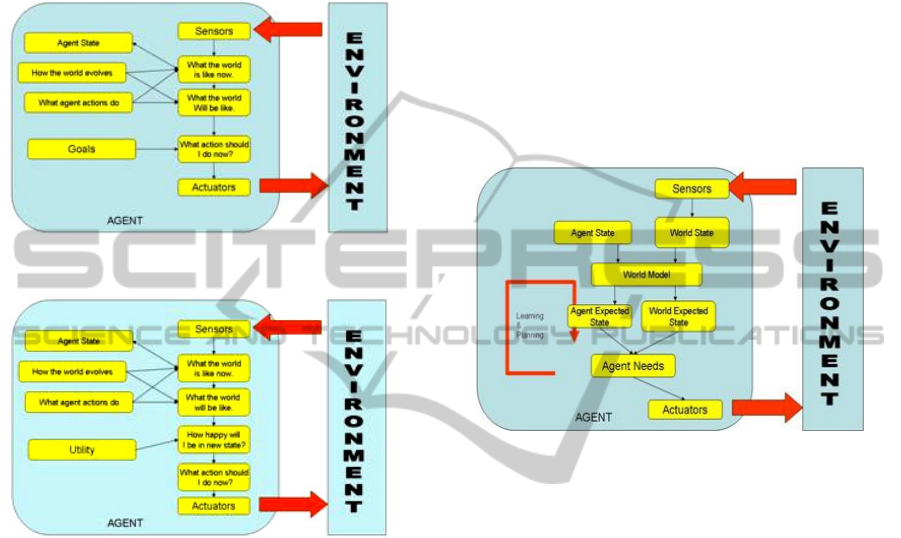
difference is that Goal-based agents effect actions to
achieve a particular goal and the Utility-based agents
seek actions that satisfy a utility function.
Anthropomorphizing the two types of agent, the
Goal-based agent might ask ‘Did I accomplish the
mission?’ while the Utility-based agent might ask,
‘Am I happier with the world due to my actions?’.
Figure 4: Model-based Goal-based Agent.
Figure 5: Model-based Utility-based Agent.
The agent types discussed in this section appear
simpler than the cognitive architectures outlined
earlier which is not surprising. The cognitive
architectures seek to mimic thinking while the
agents seek to mimic behaviour. In this regard, the
agent architectures fall short of being able to provide
completely autonomous behaviour in that they are
still reflexive to their environment i.e. there is no
reasoning. Furthermore, there is no adaptability as
the architectures do not explicitly signal where,
when, nor how learning should proceed. Is it
possible then to improve agent behaviour without
adopting the overhead of the existing cognitive
architectures? The following proposes an agent
architecture that attempts to align agent behaviour
more closely with that of a human player.
2.4 Needs-based Agent
Two assumptions form the basis for the proposed
agent architecture. First, it is a given that the human
condition does not consist simply of reacting to the
environment in terms of set goals or utilities. Even
in the context of a game, a human player’s actions
may only be broadly described in terms of goals and
utilities. In reality the human player’s actions are
modulated by other factors such as emotion or
motivation (Ness, Tepe, and Ritzer, 2004). Thus,
the agent architecture must include to some degree
factors that modulate human behaviour. Secondly, it
is a hallmark of all life forms that they be adaptable
(Grand, 2000). Life is a continual learning process
with survival as the goal. Therefore, the agent
architecture must include mechanisms for learning
and that implies cues for when learning must occur.
Figure 6: Proposed Agent Architecture.
Figure 6 is a sketch of a proposed Needs-based
agent. The World State is the agent’s representation
of the world including its own state in the world.
The Agent State represents the agent’s internal state
that is not necessarily visible to the world. The
World Model describes how an agent’s World State
and Agent State will change in that world. The
Expected State, for both the agent and the world, is
the output of the world model and represents an
estimate of how things may change in each case.
The Agent Needs are a set of functions that reflect
Maslow’s Hierarchy of Needs (see Figure 7). Needs
are tuplets of goals and utility as complimentary,
simultaneous considerations.
The model is similar in structure to the model-
based architecture but differs significantly in three
respects. First, it incorporates the concept that the
human mind formulates models of the world and
continuously tries to predict its environment. This
was expressed most recently by Hawkins (Hawkins
and Blakeslee, 2004), more generally (and much
earlier) by Brentano (Brentano and al, 1874), and to
some extent by Grand (Grand, 2007). When
predictions meet realization, the process is auto-
associative i.e. the predicted outputs are identical to
the next experienced inputs.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
276
Second, learning is cued to occur when
predictions conflict with reality to a significant
degree (though the threshold must somehow be
defined). The expected world and agent states are
compared to the present input states. If the world
model is satisfactory there will be no difference
between the two states; however, any difference in
the two will potentially trigger learning.
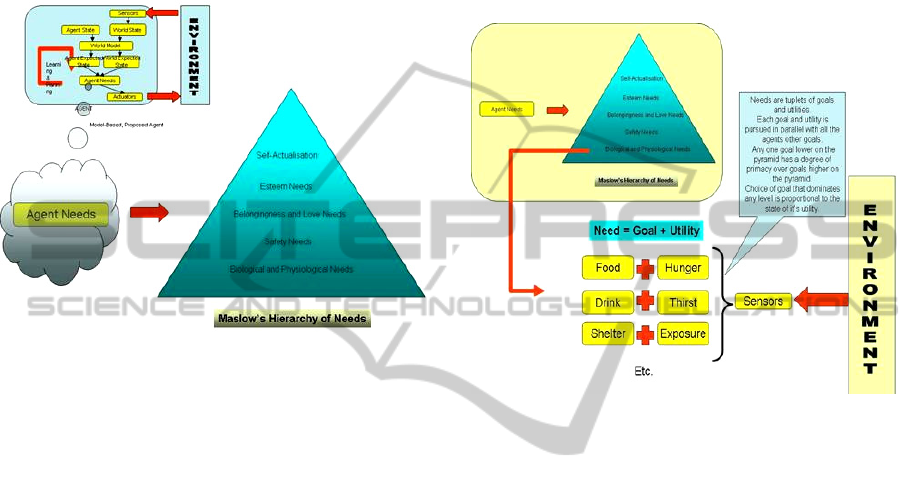
Figure 7: Maslow’s Hierarchy of Needs (MHN).
Although this might not seem different from
current paradigms, it actually is. Current agents
observe the world and decide upon an action. What
is proposed here is that an agent first observes the
world and estimates what the world should look like
on the next observation. This effectively assures a
continuous assessment of the ‘world model’.
The third difference between the needs-based
model and the goal and utility-based models is the
use of ‘needs’. Needs are tuplets of goal and utility.
For example, in a biological context, an agent may
have a need of sustenance for energy. The need is a
tuplet of the goal of obtaining food measured by the
utility that of satisfying hunger. In a game context,
the need for safety might be a tuplet of the goal of
moving to a point and the utility of shelter from
attack of that point. On the surface this seems simply
a rewording of existing approaches. The nuance
incorporated in the proposed approach is the use of a
hierarchy of needs that gives representation to the
relative nature of needs. It is through this use of
Maslow’s Hierarchy of Needs (Maslow, 1943)
(MHN) that behaviour becomes modulated.
The key elements of the “needs-based”
architecture are as follows. In the first place, an
agent's needs are hierarchically arranged to parallel
MHN. The most basic survival needs lie at the base
of the pyramid. If these needs are not met, the agent
can no longer function. One level above the base
needs, are the needs that if not met, may threaten the
base needs. Similarly, two levels above the base
needs are those that may threaten the level below
that, and so on up the pyramid. The implementation
challenge is to draw the parallels between the human
representation of MHN and the agent. This is done
by expanding on the principles of 'goals' and 'utility'
as shown in Figure 8 and mentioned earlier with
respect to goal-based and utility-based agents.
Figure 8: Agent’s needs.
The MHN hierarchy cannot be considered rigid,
and if used as such, it will be a dull instrument. A
rigid application of MHN means rigid analysis, yet
people are more complex. Indeed, the hierarchy is
not fixed nor are the goals unique to a specific level.
In the first case, an agent may have a ‘higher
purpose’ that will assume primacy over even base
functions. The reason for this is that there is no
difference between a need that is satisfied and a need
that is unattainable. While the need for safety may in
principle override the need to help the group but if
safety is clearly unattainable then an agent may
decide to keep helping the group (i.e. “take one for
the team”). Goals are also not unique to any given
level. At the human level, the goal to obtain food is
valid for addressing the need of hunger; however,
food can also be obtained for the purpose of sharing
(group belongingness) or status (obtaining rare
food).
It might be asked if this is not simply a
subsumption architecture (Brooks, 1991). While
similar, the proposed architecture is distinct. First,
the subsumption architecture speaks to the current
state of the environment and the “desired external
manifestations of the robot control system” (Brooks,
1986). Thus the focus is very much on what is
AGENT-BASED COMPUTER-GENERATED-FORCES' BEHAVIOUR IMPROVEMENT
277

external to the agent. However to incorporate some
sense of self (which seems necessary for any agent
to successfully parallel human behaviour), it is
logical that there must be some focus on internal
states. For humans, the role of internal states is
neatly captured by MHN. Second, subsumption
architectures are implemented as finite state
machines. The intent in the proposed architecture is
that all levels operate in parallel and within each
level multiple sub-needs are addressed. At no level
is there a set number of fixed permissible states,
rather there is an aggregated estimate of the degree
to which needs at a given level are satisfied.
To summarize, an agent architecture has been
proposed to exhibit human-like behaviour in a game
environment. The proposed agent architecture is
simpler than existing cognitive architectures but
nonetheless comprises elements and approaches that
will modulate simple reflexive behaviours. To
achieve the latter, we make use of the human model
of MHN and apply it to Model-based agents. It is
expected that by creating an agent equivalent of
MHN and implementing it within a model-based
agent architecture, it will be possible to emulate
human behaviour in CGAs.
3 IMPLEMENTATION OF A
“NEEDS-BASED” AGENT
The paper would be incomplete without some
consideration of implementation issues. Given the
conceptual design of a needs-based agent that
operates under the MHN framework, it is possible to
make some technical judgements about the internal
structure of the agent and what technologies might
effect or facilitate its implementation. This section
captures these early design decisions and presents
our technical position for implementing a prototype
“needs-based” agent.
3.1 Agent Framework
The nature of the MHN structure implies that the
implementation of a needs-based agent will take the
form of a multi-agent system and therefore require a
multi-agent framework. Given the number of layers
in the MHN and the complexity of the agent
interactions within that pyramid, only the simplest of
agents could be implemented as a single agent
process. Also, it would be impossible to scale this
implementation to more complex implementations
with multiple sensors and actuators. Thus it makes
sense to take the early decision that the
implementation of the “needs-based” agent will be a
community of agents within an agent framework.
This agent framework will support the operation and
management of individual agents as well as provide
the essential inter-agent communications. The scope
of these communications cannot be considered
simple message passing, but may involve more
advanced communication protocols (i.e. inter-agent
negotiation or competition among agents) with
specialized vocabulary requirements (ontologies). It
is also vital that any agent framework used on this
implementation have the flexibility to adapt to
changes in the research program or allow the
implementation of any requirements that haven’t yet
emerged. Since the purpose is not to develop a
general multi-agent framework but to implement the
needs-based agent architecture, one of the early
decisions was to use the Java Agent Development
Framework (JADE).
3.2 Java Agent Development
Framework (JADE)
JADE is an open-source middleware that includes a
runtime environment for JADE agents, a library of
classes that programmers can use to develop agents
(either directly or by tailoring the classes), and tools
for administration and monitoring the activity of
running agents. The important parts of the
framework are the agent container, the agent
management system (AMS) agent and the directory
facilitator (DF) agent (Figure 9). Containers house
agents and there are two types of containers: main
containers and normal containers. Every main
container holds an AMS agent and a DF agent in
addition to any other agents and manages all the
agents within a “platform”. The AMS provides a
naming service to ensure all agents have unique
names and is the means by which agents are
managed within the container. The DF provides a
“yellow pages” listing of agents and the services
they offer. Agents can query the DF and find other
agents that offer the necessary services to achieve
goals. The JADE framework follows the
architectural and communications structure specified
in the FIPA (Foundation for Intelligent Physical
Agents) standards. FIPA is part of the IEEE
Computer Society. JADE also provides features that
allow the development of user-defined ontologies
and complex interaction protocols.
JADE also provides essential links to future
proof the implementation from the standpoint of its
open-source nature, existing extensions to the JADE
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
278

platform, and existing abilities to work with other
technologies. As an open source tool, the classes and
framework can be tailored to address any unforeseen
risk in the technical solution. The JADE community
is very active and the scope of current projects and
interest will ensure it continues to be so in the near
future. JADE has the added advantage of existing
extensions that support the development of BDI-
based agents (JADEX). If the development of needs-
based agents requires the implementation of Belief-
Desires-Intentions algorithms, JADE has existing
support. Perhaps one of the more important
architectural aspects of the JADE framework is the
existing work integrating JADE with OSGi
technology. OSGi technology provides a mature
component system designed to work across a variety
of domains. The capability to work with components
reduces complexity. Being able to work with
established interfaces promotes reuse and creates a
dynamic execution framework where agents and
their services can constantly change. In other words,
new agents can be added to the system while
existing agents are running and OSGi will allow hot-
swappable agents to be implemented. Similarly, the
OSGi manages the library dependencies and
prevents “Library Hell” from occurring (Library
Hell is a condition where conflicts between the
support libraries of the agent applications prevent
the simultaneous execution of two agents. It is also
called DLL Hell). Thus the JADE agent framework
addresses our concerns and provides both the
functionality to implement needs-based agents but
also mitigates a measure of the risk.
Figure 9: JADE Framework.
3.3 Agents’ Types
As already discussed, the implementation of a
“needs-based” agent architecture implies a multi-
agent system with one or more agents operating at
each layer of the MHN pyramid. As we consider the
implementation, three types of agents emerge:
pyramid agents, arbitration agents, and learning
agents. Pyramid agents operate at one (and only one)
layer of the MHN pyramid. It is possible that
multiple agents will be required to effectively
address a single layer. For example, a pyramid agent
may model the food and hunger sensors and propose
goals to acquire food. Once this decision is made,
there needs to be a path for each agent in the
pyramid to influence actuators. Having multiple
agents attempting to grab actuators is not going to
work and therefore we require some agents to act as
arbitrators between conflicting goals and between
competing levels of the MHN pyramid. These
arbitration agents become responsible for
implementing the MHN hierarchy, monitoring agent
information at each level and in the end, changing
actuators that will have an expected impact on the
environment. Where the expected state of the agent
and the expected state of the world differ from the
actual state, a third type of agent needs to be
involved, learning agents. Learning agents
dynamically adapt the pyramid agents and
arbitration agents to again bring the system to a state
where predicted outcomes match environmental
observations. Thus we currently foresee the
requirement for three classes of agents: agents to fill
a layer (or partial layer) in the MHN pyramid, agents
to arbitrate between competing goals and objectives
and produce actuator changes, and when prediction
models fail, learning agents adapt the needs-agents
to effectively address the new world order.
3.4 Design Decisions
This section captures some early design decisions
and technology assessments for the implementation
of a needs-based agent and makes some analysis of
what the internal representation of that agent might
be. At present it is possible to foresee the creation of
three roles within the needs-based agent architecture.
Those are pyramid roles that address elements of
each layer of MHN, arbitration roles to translate
conflicting goals to actuator actions, and learning
nodes to dynamically modify agents when prediction
fails to effectively address changes in the world
state. From the infrastructure perspective, tools and
technologies exist that from a first-look would allow
the construction of a “needs-based” agent that
operates using the MHN pyramid. The JADE agent
framework has been selected as a suitable platform
in that it provides a flexible multi-agent
AGENT-BASED COMPUTER-GENERATED-FORCES' BEHAVIOUR IMPROVEMENT
279

infrastructure with extensions to other resources and
technologies that may prove advantageous in future
implementations. Thus, the possibility of
implementing a “needs-based” agent has a measure
of technical feasibility.
4 CONCLUSIONS
This paper captures the initial stages of a research
project to improve the decision making performance
of simulated entities in CGF software applications.
By drawing the analogy between CGF synthetic
entities and CGAs in games, it was determined that
the current state of AI in video games is wanting,
mostly due to conflicting goals (realism versus
player experience). Cognitive architectures are too
complex to be effectively used in multiple CGA
scenarios leading to our decision to focus on agent-
based solutions that emulate human behaviour
without the overhead of simulating human cognition.
The traditional reflex and model-based agents were
found to be insufficient to emulate human behaviour
effectively, so a new agent model was proposed. The
“Needs-based” agent architecture is simpler than
existing cognitive architectures but nonetheless
comprises elements and approaches that will
modulate simple reflexive behaviours.
This paper also captured some early design
decisions and technologies that would allow the
implementation of a “needs-based” agent. It is
obvious that any implementation of a needs-based
agent will be a community of smaller agents in a
flexible hierarchy. This drove our decision to use
JADE and the OSGi. With regard to the internal
structure, we foresee the creation of pyramid agents
that address the goal and utility tuplets within each
level of the MHN framework; the creation of
arbitration agents to address conflicting proposed
actions within the model and learning agents to
dynamically modify agent parameters in response to
autoassociation failures. From these preliminary
looks at implementation, it appears that the creation
of a “needs-based” agent has a measure of technical
feasibility. The next steps for the project are to
proceed with the construction of a prototype to
evaluate its behaviour and the feasibility of
integrating such a framework across CGF
applications.
REFERENCES
Anderson, J. R., 1993. Rules of the Mind. Hillsdale, NJ:
Erlbaum.
Bourassa, M. A. J., Massey, L., 2009. Artificial Intelligen-
ce in Computer-Generated Forces - A Survey of the
State-of-the-Art, Technical Memo, DRDC Ottawa TR
2009- In Print.
Brentano, F., et al., 1874. Psychology from an Empirical
Standpoint.
Brooks, R., 1991. Intelligence Without Representation. In
Artificial Intelligence 47. pp. 139-159.
Brooks, R., 1986. A Robust Layered Control System for a
Mobile Robot. In IEEE Journal of Robotics and
Automation, RA-2, 1. pp. 14-22.
Duch, W. et al., 2008. Cognitive Architectures: Where do
we go from here? In Proceedings of the 2008
Conference on Artificial General Intelligence:
Proceedings of the First AGI Conference, IOS Press,
pp.122-136.
Grand., S., 2000. Creation: Life and How to Make It.
Orion House, London.
Hawkins, J., Blakeslee, S., 2004. On Intelligence –Owl
Books, Henry Holt and Company, New York.
Maslow, A. H., 1943. A Theory of Human Motivation,
Psychological Review 50. pp. 370-396.
Ness, J., Tepe, V., Ritzer, D., 2004. Representing
Cognition as an Intent-Driven Process. In The Science
of Simulation of Human Performance, Advances in
Human Performance and Cognitive Engineering
Research Series, Elsevier.
Russell, S., Norvig, P., 2003. Artificial Intelligence: A
Modern Approach. Prentice-Hall Inc. New Jersey.
Russell, S., Norvig, P., 2010. Artificial Intelligence: A
Modern Approach. Prentice-Hall Inc. New Jersey, 3rd
Edition.
Taylor, A., et al., 2009. Artificial Intelligence in Computer
Generated Forces: Comparative Analysis. In 2009
Huntsville Simulation Conference.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
280
