
SVM-BASED PARAMETER SETTING OF SELF-QUOTIENT
ε-FILTER AND ITS APPLICATION TO NOISE ROBUST HUMAN
DETECTION
Mitsuharu Matsumoto
The University of Electro-Communications, 1-5-1, Chofugaoka, Chofu-shi, Tokyo, 182-8585, Japan
Keywords:
Parameter setting, Nonlinear filter, Support vector machine, Self-quotient ε-filter, Human detection.
Abstract:
This paper describes SVM-based parameter setting of self-quotient ε-filter (SQEF), and its application to
noise robust human detection combining SQEF, histograms of oriented gradients (HOG), and support vector
machine (SVM). Although human detection combining HOG and SVM is a powerful approach, as it uses
local intensity gradients, it is difficult to handle noise corrupted images. On the other hand, although human
detection combining SQEF, HOG and SVM can realize noise robust human detection, SQEF requires manual
parameter setting. Our aim is not only to train SVM but also to adjust the parameter of self-quotient ε-filter
using the trained SVM in training procedure. The experimental results show that we can realize noise robust
human detection by using SQEF with the obtained parameter, HOG and SVM trained by intact images without
noise.
1 INTRODUCTION
Detecting human from images is an important ap-
plication in image processing. The important re-
quirement is to extract the feature from the images
clearly, even in backgrounds under different illumi-
nation. Histogram of Oriented Gradients (HOG) al-
gorithm is a useful approach to match this require-
ment (Dalal and Triggs, 2005). It can extract the fea-
ture clearly compared to other existing feature sets in-
cluding wavelets (Viola et al., 2003). The approach
is related to edge orientation (Freeman et al., 1996),
SIFT descriptors (Lowe, 2004) and shape contexts
(Belongie et al., 2001). Although locally normalized
HOG detectors are attractive approaches to detect the
human from the image, it is difficult to detect them
from the noise corrupted images because it uses local
intensity gradients.
To handle the problems, we introduce self-
quotient ε-filter (SQEF), which is an advanced noise
robust self-quotient filter (SQF) and propose a noise
robust SVM-based human detection combining SQEF
and HOG.
SQEF (Matsumoto, 2010a; Matsumoto, 2010b) is
based on the idea of SQF (Wang et al., 2004) and ε-
filter (Arakawa and Okada, 2005).
SQF is a simple nonlinear filter to extract the fea-
ture from an image (Wang et al., 2004). It needs only
an image, and can extract intrinsic lighting invariant
property of an image, while removing extrinsic factor
corresponding to the lighting. Feature extraction by
SQF is simpler than that based on multi-scale smooth-
ing (Gooch et al., 2004). SQF can extract the outline
of the objects independent of shadow region. How-
ever, as it assumes that the image does not include
noise, it can not extract the shape and texture when
the noise damages the image. The noise influence be-
comes large due to the self-quotient effect of SQF.
Although many studies have been reported to re-
duce the small amplitude noise while preserving the
edge (Himayat and Kassam, 1993; Tomasi and Man-
duchi, 1998), it is considered that ε-filter is a promis-
ing approach due to its simple design. It does not
need to have the signal and noise models in advance.
It is easy to be designed and the calculation cost is
small because it requires only switching and linear
operation. We can clearly extract the feature from
noise corrupted image images by defining SQEF as
the ratio of two different ε-filters, and can reduce the
noise influence by employing SQEF as preprocessing
of HOG.
Although human detection combining HOG,
SQEF and SVM can realize noise robust human de-
tection, SQEF requires manual parameter setting. Our
aim in this paper is not only to train SVM but also to
adjust the parameter of ε-filter using the trained SVM
in training procedure.
The rests of this paper are organized as follows:
290
Matsumoto M..
SVM-BASED PARAMETER SETTING OF SELF-QUOTIENT e-FILTER AND ITS APPLICATION TO NOISE ROBUST HUMAN DETECTION.
DOI: 10.5220/0003177102900295
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 290-295
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

(a) A sample
image from
MIT pedes-
trian database
(file name:
per00002.pgm)
(b) Filter output
of SQF when we
used original im-
age
(c) Filter output
of SQEF when we
used original im-
age
(d) Impulse noise
corrupted image
(40% impulse
noise)
(e) Filter output
of SQF when
we used impulse
noise corrupted
image
(f) Filter output
of SQEF when
we used impulse
noise corrupted
image
Figure 1: Self-quotient filter and self-quotient ε-filter from
original image and impulse noise corrupted image.
In section 2, we introduce the algorithm of SQEF
and describe its features compared to SQF. In section
3, we explain SVM-based parameter setting of self-
quotient ε-filter, and implement it in human detection
combining SQEF, HOG and SVM. In section 4, ex-
perimental results are given to clarify the validness
of our approach. Human detection combining SQEF,
HOG and SVM with the obtained parameter is also
shown with the results using other approaches. A lib-
svm (Chang and Lin, 2001), MIT pedestrian test set
(Papageorgiou and Poggio, 2000) and standard im-
age database (SIDBA) are used as a SVM classifier,
positive sample images and negative sample images,
respectively throughout the experiments. Conclusion
follow in section 5.
2 SELF-QUOTIENT ε- FILTER
We first describe the algorithms of self-quotient filter
and self-quotient ε-filter, and explain their features to
clarify the handling problem. Let us define x(i
1
, i
2
)
as the image intensity at the point i = (i
1
, i
2
) in the
image. The aim of self-quotient filter is to separate
the intrinsic property and the extrinsic factor, and to
remove the extrinsic factor (Wang et al., 2004). To
solve the problem, self-quotient filter assumes that a
smoothed version of an image has approximately the
same illumination as the original one. In self-quotient
filter, we first calculate the following equation:
z(i
1
, i
2
) =
x(i
1
, i
2
)
F[x(i
1
, i
2
)]
, (1)
where x(i
1
, i
2
) is the original image and F is the
smoothing function.
Due to the process of Eq.1, the texture and edge
can be extracted because the original image is divided
by the smoothed image. However, self-quotient fil-
ter assumes that the image does not include the noise.
When we consider the noise corrupted image, the
noise is reduced in the smoothed images F[x(i
1
, i
2
)],
while the original image x(i
1
, i
2
) includes the noise.
As a result, the influence from the noise in SQF is
emphasized very much due to the self-quotient effect
of SQF in Eq.1.
A simple idea to solve the noise influence in SQF
is to use two smoothed filters instead of original im-
age as follows:
y(i
1
, i
2
) =
F
1
[x(i
1
, i
2
)]
F
2
[x(i
1
, i
2
)]
. (2)
F
1
and F
2
should be different because the output al-
ways becomes 1 if F
1
and F
2
are the same smoothed
filter.
However, even if we design SQF by using two dif-
ferent smoothed filters, not only the noise is smoothed
but also the texture and shape are blurred. As the blur
level of one smoothed filter is different from the other,
it is also difficult to handle impulsive noise. Hence,
we need to employ alternative filters, which can re-
duce the small amplitude noise effectively, while pre-
serving the texture and shape information instead of
simple smoothed filter. The alternative filters should
be simple to keep the simplicity of SQF.
Based on the aboveprospects, self-quotientε-filter
(SQEF) is designed as follows:
y(i
1
, i
2
) =
Φ
ε
1
[x(i
1
, i
2
)]
Φ
ε
2
[x(i
1
, i
2
)]
, (3)
where Φ
ε
represents ε-filter described as follows:
z(i
1
, i
2
) =
Φ
ε
[x(i
1
, i
2
)] = x(i
1
, i
2
) + (4)
K
∑
j
1
=−K
K
∑
j
2
=−K
a( j
1
, j
2
)F(x(i
1
+ j
1
, i
2
+ j
2
) −
x(i
1
, i
2
)),
SVM-BASED PARAMETER SETTING OF SELF-QUOTIENT e-FILTER AND ITS APPLICATION TO NOISE
ROBUST HUMAN DETECTION
291
where a( j
1
, j
2
) represents the filter coefficient.
a( j
1
, j
2
) is usually constrained as follows:
K
∑
j
1
=−K
K
∑
j
2
=−K
a( j
1
, j
2
) = 1. (5)
F(x) is the nonlinear function described as follows:
|F(x)| ≤ ε : −∞ ≤ x ≤ ∞, (6)
where ε is a constant number constrained as follows.
0 ≤ ε. (7)
It should be noted that calculation cost of ε-filter is
small because it requires only switching and linear
operation. See the references (Arakawa and Okada,
2005) if the reader would like to know the details
about ε-filter.
When we apply SQEF to impulse noise corrupted
image, it is considered that both ε-filters in SQEF
keep the impulse noise in the image unlike when two
smoothed filters are employed. Hence, when one fil-
ter output in SQEF is divided by the other filter in
SQEF, the impulse noise effect is reduced by the self-
quotient effects.
Some examples are shown to clarify the difference
between self-quotient filter (SQF) and SQEF. Figure 1
shows the examples of filter output of SQEF to show
its robust feature extraction from noise corrupted im-
ages. We also show the filter output of self-quotient
filter (SQF). Fig.1(a) shows a sample image from MIT
pedestrian database (Papageorgiou and Poggio, 2000)
. Figs.1(b) and 1(c) show the filter outputs of SQF
and SQEF, respectively when we used the original im-
age. On the other hand, Fig.1(d) shows the sample
image corrupted with 40% impulse noise. Figs.1(e)
and 1(f) show the filter outputs of SQF and SQEF, re-
spectively when we used the impulse noise corrupted
image. As shown in Fig.1, both SQF and SQEF can
extract the feature from the original image. However,
SQF cannot extract its feature from the impulse noise
corrupted image, while SQEF can extract the feature
from the impulse noise corrupted image.
3 SVM-BASED PARAMETER
SETTING
This section gives the algorithm of SVM-based pa-
rameter setting, and describes the implementation of
human detection combining SQEF, Histograms of
Oriented Gradients (HOG) and support vector ma-
chine (SVM). As is described in the previous section,
SQEF can extract the features not only from the in-
tact images without noise but also from the noise cor-
rupted images. However, SQEF requires parameter
setting to obtain the adequate filter outputs.
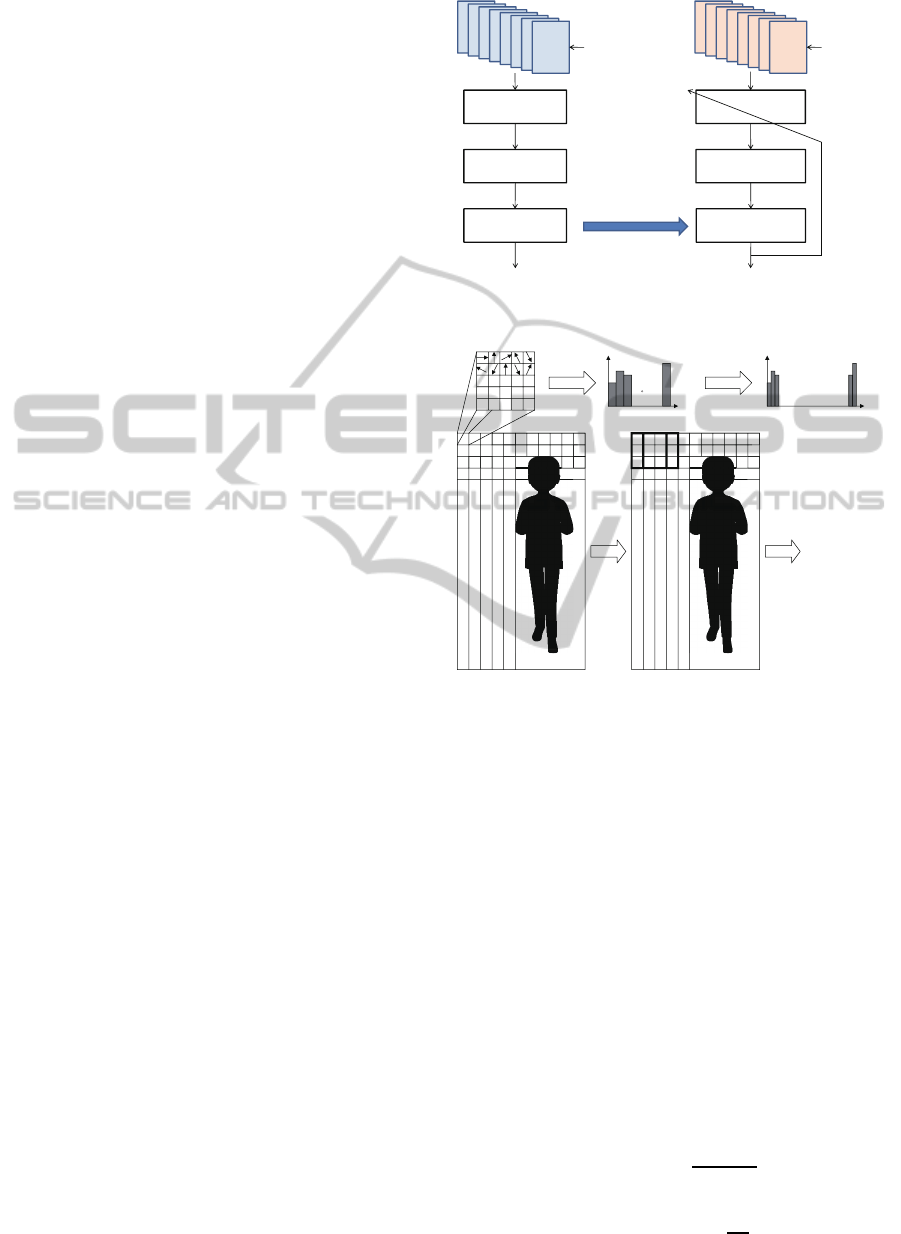
Self-quotient filter
Training images
without noise
Histograms of
oriented gradients
Support vector
machine
Test images
with noise
Self-quotient ε-filter
Histograms of
oriented gradients
Trained SVM
Figure 2: Basic concept of SVM-based parameter setting.
⋅⋅⋅
FrequencyGradient calculation
Filter output
⋅⋅⋅
Frequency
Feature vector
Cell
sliding
Connection Voting
Figure 3: Procedure of Histogram of Oriented Gradients
(HOG) from SQEF output.
Figure 2 shows the procedure of our approach to
set the parameter of SQEF by using SVM. We first
prepare numerous training images without noise, and
apply not SQEF but SQF to the training images. We
then extract the features from the filter output of SQF
by using HOG. Figure 3 shows the procedure of fea-
ture extraction from SQF outputs using HOG. The
method is based on evaluating well-normalized local
histograms of image gradient orientations in a dense
grid. When we employ the intact images without
noise, as local object appearance and shape are kept
in SQF output, the gradient intensity and the gradient
direction of SQF are calculated for all the pixels as
follows:
f
i
1
(i
1
, i
2
) = y(i
1
+ 1, i
2
) − y(i
1
− 1, i
2
) (8)
f
i
2
(i
1
, i
2
) = y(i
1
, i
2
+ 1) − y(i
1
, i
2
− 1) (9)
m(i
1
, i
2
) =
q
f
2
i
1
+ f
2
i
2
(10)
θ(i
1
, i
2
) = arctan
f
i
2
f
i
1
(11)
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
292

Table 1: Experimental results of human detection from im-
pulse noise corrupted image.
Used images Recognition rate
Original images 50%
Self-quotient filter 50.1%
Self-quotient ε-filter 80.7%
The basic idea of HOG is that local object ap-
pearance and shape can often be characterized rather
well by the distribution of local intensity gradients or
edge directions, even without precise knowledge of
the corresponding gradient or edge positions (Dalal
and Triggs, 2005). In practice, this is implemented
by dividing the filter output into small spatial re-
gions (“cells”), for each cell accumulating a local 1-
D histogram of gradient directions or edge orienta-
tions over the pixels of cell. The obtained direction
θ (0
◦
≤ θ ≤ 180
◦
) is divided with 20
◦
intervals. 9
dimensional feature vector is generated by adding the
gradient intensity m(i
1
, i
2
). We then regard3 × 3 cells
as “Block” and generate many blocks by sliding on a
pixel to pixel basis. The feature vector is finally ob-
tained by combining all the feature vector. The ob-
tained feature vector is used to train support vector
machine (SVM). The above procedure corresponds to
the left procedure in Fig.2.
After the aboveprocedure,we set the parameter of
ε-filter using the trained SVM. The test images with
noise are first applied to self-quotient ε-filter. We then
extract the feature from the filter outputs of SQEF by
using HOG the same as the preprocessing. The ob-
tained feature vector is adopted to SVM trained in the
preprocessing. It is expected that the recognition rate
will be high if the filter output of SQEF is similar to
the filter output of SQF from intact images without
noise. Hence, the parameter is obtained as the param-
eter, which maximizes the recognition rate with re-
gard to the test images. Finally, we can detect human
from noise corrupted images by using SQEF with the
obtained parameter, HOG and SVM trained by the in-
tact images without noise.
Let us test our criterion experimentally.
4 EXPERIMENTS
We conducted some experiments on SVM-based pa-
rameter setting of self-quotient ε-filter. MIT pedes-
trian database and SIDBA were employed as image
database. MIT pedestrian database contains 900 im-
ages. The size is 64 pixel × 128 pixel. Some non
person images were selected from standard image
database (SIDBA). 900 64 pixel × 128 pixel images
were cut from them. We also prepared 40% impulsive
(a) Person image
from MIT pedes-
trian database
(per00003.pgm)
(b) Non-person image from
SIDBA (Airplane)
(c) Person image
from MIT pedes-
trian database
with 40% im-
pulse image
(per00003.pgm)
(d) Non-person image from
SIDBA with 40% impulse noise
(Airplane)
Figure 4: Sample images of person image and non-person
image (Original and noise corrupted images).
noise corrupted images by adding the impulse noise to
the above 1800 images. Figure 4 shows original per-
son / non-person images and its noise-corrupted ver-
sion. Our aim is to detect human from these types of
noise corrupted images not by using the data trained
by the impulse noise corrupted image but by using the
data trained by intact images without noise.
As a SVM tool, we used libsvm, a library for
support vector machines (Chang and Lin, 2001), and
employed default setting and parameters throughout
the experiments for simplicity. In the experiments,
we used original 450 pedestrian images from MIT
pedestrian database and 450 non-person images from
SIDBA. SVM was trained by using the data combin-
ing SQF and HOG from the above 900 person / non-
person images. To simplify the experiments, we set
ε
1
was set to 0, (Original image), and tried to set ε
2
by using the proposed method.
We then checked the relation between ε value and
recognition rate when we used the method combining
SQEF with changing the parameter, HOG and SVM
trained by the previous procedure. Figure 5 shows the
SVM-BASED PARAMETER SETTING OF SELF-QUOTIENT e-FILTER AND ITS APPLICATION TO NOISE
ROBUST HUMAN DETECTION
293
0%
10%
20%
30%
40%
50%
60%
70%
80%
10
20
30
40
50
60
70
80
90
100
110
120
130
140
150
160
170
180
190
200
210
220
230
240
250
Recognition rate
Recognition rate is maximal
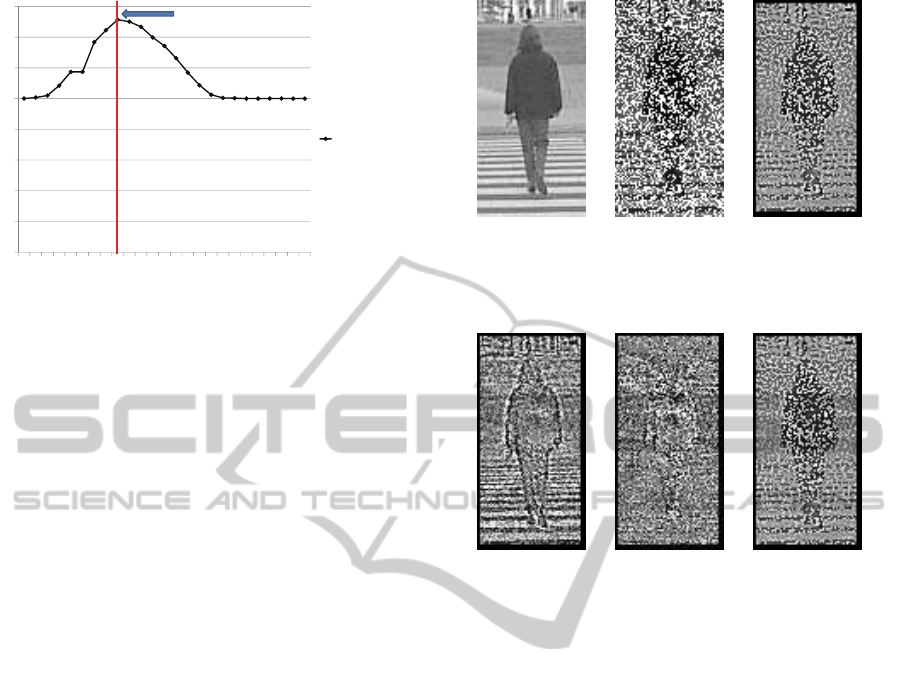
Figure 5: Relation between ε value and recognition rate:
Impulse noise corrupted images were used.
relation between ε value and recognition rate. The
parameter, which maximizes the recognition rate was
90 as shown in Fig. 5.
Finally, we conducted the experiments of human
detection by using SQEF with the obtained param-
eter, HOG and SVM. The test images are the re-
maining 450 pedestrian images from MIT pedestrian
database and the remaining 450 non-person images
from SIDBA with impulse noise, which are differ-
ent from the training images. For comparison, we
also tested to classify them using the method com-
bining HOG and SVM, and the method combining
SQF, HOG and SVM. Table 1 shows the recogni-
tion results. It should be note that the recognition
rate becomes 50% even if the system always says
“human” or “non-human” because the sample images
include human and non-human images evenly. In
other words, the recognition results of the comparison
method were almost no meaning when the noise were
added. On the other hand, the proposed approach
could detect human from noise corrupted images over
80% using training data with intact images without
noise and the obtained parameter.
We finally show the example of the filter output of
self-quotient ε-filter with the obtained parameter. Fig-
ure 6 shows the obtained results. Figure 6(a) shows
a sample image from MIT pedestrian database. Fig-
ure 6(b) shows the sample image corrupted with im-
pulse noise. Figure 6(c) shows the filter output of SQF
when we used the sample image corrupted with im-
pulse noise.
Figure 6(d) shows the filter output of SQEF with
the obtained parameter (ε
2
=90) when SQEF is applied
to the sample image corrupted with impulse noise.
For comparison, we also show the filter outputs of
SQEF with regard to the sample image corrupted with
impulse noise when ε
2
was set to 10 and 250 as shown
in Figs 6(e) and Fig. 6(f), respectively.
As shown in Fig.6, SQEF could extract the feature
(a) A test image
from MIT pedes-
trian database
(file name:
per00927.pgm)
(b) Impulse noise
corrupted image
(40% impulse
noise)
(c) Filter output
of SQF when
we used impulse
noise corrupted
image
(d) Filter output
of SQEF when
we used impulse
noise corrupted
image. (ε
2
=90)
(e) Filter output
of SQEF when
we used impulse
noise corrupted
image. (ε
2
=10)
(f) Filter output
of SQEF when
we used impulse
noise corrupted
image. (ε
2
=250)
Figure 6: Self-quotient image and self-quotient ε-filter from
original image and impulse noise corrupted image.
from the impulse noise corrupted image with the ob-
tained parameter, while it could not extract the feature
from the impulse noise corrupted image with inade-
quate parameters.
5 CONCLUSIONS
In this paper, we proposed SVM-based parameter set-
ting of self-quotient ε-filter (SQEF) and implement
it to human detection combining SQEF, HOG and
SVM. We conducted some experiments and com-
pared the filter output with the adequate parameter to
the filter outputs with other parameters. Throughout
the experiments, the proposed method could obtain
the adequate parameter and could realize noise robust
human detection from noise corrupted images using
the training data with the clean image without noise.
For future works, we would like to apply ourapproach
to robot vision.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
294

ACKNOWLEDGEMENTS
This research was supported by the research grant
of Support Center for Advanced Telecommunications
Technology Research (SCAT), by the research grant
of Foundation for the Fusion of Science and Tech-
nology, by Special Coordination Funds for Promoting
Science and Technology, and by the Ministry of Edu-
cation, Science, Sports and Culture, Grant-in-Aid for
Young Scientists (B), 20700168, 2008.
REFERENCES
Arakawa, K. and Okada, T. (2005). ε-separating nonlinear
filter bank and its application to face image beautifica-
tion. In IEICE Transactions on Fundamentals, pages
1216–1225. IEICE.
Belongie, S., Malik, J., and Puzicha, J. (2001). Matching
shapes. In Proc. of Int’l Conf. on Computer Vision,
pages 454–461. IEEE.
Chang, C.-C. and Lin, C.-J. (2001). LIBSVM:
a library for support vector machines. In
http://www.csie.ntu.edu.tw/ cjlin/libsvm.
Dalal, N. and Triggs, B. (2005). Histograms of oriented
gradients for human detection. In Proc. of Int’l Conf.
on Computer Vision and Pattern Recognition., pages
886–893. IEEE.
Freeman, W. T., Tanaka, K., Ohta, J., and Kyuma, K.
(1996). Computer vision for computer games. In
Proc. of Int’l Conf. on Automatic Face and Gesture
Recognition, pages 100–105. IEEE.
Gooch, B., Reinhard, E., and Gooch, A. (2004). Human fa-
cial illustrations: Creations and psychological evalua-
tion. In ACM transactions on Graphics, pages 27–44.
ACM.
Himayat, N. and Kassam, S. (1993). Approximate per-
formance analysis of edge preserving filters. In
IEEE Trans. on Signal Processing., pages 2764–2777.
IEEE.
Lowe, D. G. (2004). Distinctive image features from scale-
invariant keypoints. In Int’l Journal of Computer Vi-
sion, volume 60, pages 91–110. Springer.
Matsumoto, M. (2010a). Feature extraction from noisy face
image using self-quotient ε-filter. Proc. of Int’l Conf.
on Computer Engineering and Technology, pages
395–399.
Matsumoto, M. (2010b). Self-quotient ε-filter for feature
extraction from noise corrupted image. IEICE Trans.
on Infomation and Systems.
Papageorgiou, C. and Poggio, T. (2000). A trainable sys-
tem for object detection. In Int’l Journal of Computer
Vision, volume 38, pages 15–33. Springer.
Tomasi, C. and Manduchi, R. (1998). Bilateral filtering for
gray and color images. In Proc. of Int’l Conf. on Com-
puter Vision. IEEE.
Viola, P., Jones, M. J., and Snow, D. (2003). Detecting
pedestrians using patterns of motion and appearance.
In Proc. of Int’l Conf. on Computer Vision, volume 1,
pages 734–741. IEEE.
Wang, H., Li., S. Z., and Wang, Y. (2004). Face recognition
under varying lighting conditions using self quotient
image. In Proc. of Int’l Conf. on Automation Face and
Gesture Recognition. IEEE.
SVM-BASED PARAMETER SETTING OF SELF-QUOTIENT e-FILTER AND ITS APPLICATION TO NOISE
ROBUST HUMAN DETECTION
295
