
A LOCAL SEARCH APPROACH
TO SOLVE INCOMPLETE FUZZY CSPs
Mirco Gelain, Maria Silvia Pini, Francesca Rossi, Kristen Brent Venable
Department of Pure and Applied Mathematics, University of Padova, 35121 Padova, Italy
Toby Walsh
NICTA and UNSW, Sydney, Australia
Keywords:
Local search, Preferences, Incompleteness, Elicitation.
Abstract:
We consider fuzzy constraint problems where some of the preferences may be unspecified. This models, for
example, settings where agents are distributed and have privacy issues, or where there is an ongoing preference
elicitation process. In this context, we study how to find an optimal solution without having to wait for all the
preferences. In particular, we define local search algorithms that interleave search and preference elicitation,
with the goal to find a solution which is ”necessarily optimal”, that is, optimal no matter what the missing
data are, while asking the user to reveal as few preferences as possible. While in the past this problem has
been tackled with a branch & bound approach, which was guaranteed to find a solution with this property, we
now want to see whether a local search approach can solve such problems optimally, or obtain a good quality
solution, with fewer resources. At each step, our local search algorithm moves from the current solution to a
new one, which differs in the value of a variable. The variable to reassign and its new value are chosen so to
maximize the quality of the next solution. To compute this, we elicit some of the missing preferences in the
neighbor solutions. Experimental results on randomly generated fuzzy CSPs with missing preferences show
that our local search approach is promising, both in terms of percentage of elicited preferences and scaling
properties.
1 INTRODUCTION
Constraint programming (Rossi et al., 2006) is a pow-
erful paradigm for solving scheduling, planning, and
resource allocation problems. A problem is repre-
sented by a set of variables, each with a domain of val-
ues, and a set of constraints. A solution is an assign-
ment of values to the variables which satisfies all con-
straints and which optionally maximizes/minimizes
an objective function. Soft constraints (Bistarelli
et al., 1997) are a way to model optimization prob-
lems by allowing for several levels of satisfiability,
modeled by the use of preference or cost values that
represent how much we like a certain way to instan-
tiate the variables of a constraint. Incomplete fuzzy
constraint problems (IFCSPs) (Gelain et al., 2010a;
Gelain et al., 2007; Gelain et al., 2008) can model sit-
uations in which some preferences are missing before
solving starts. In this scenario, we aim at finding a
solution which is necessarily optimal, that is, optimal
no matter what the missing preferences are, while ask-
ing the user to reveal as few preferences as possible.
While in the past this problem has been tackled
with a branch & bound approach, which was guar-
anteed to find a solution with this property, we now
show that a local search method can solve such prob-
lems optimally, or obtain a good quality solution, with
fewer resources. Our local search algorithm starts
from a randomly chosen assignment to all the vari-
ables and, at each step, moves to the most promising
assignment in its neighborhood,obtained by changing
the value of one variable. The variable to reassign and
its new value are chosen so to maximize the quality of
the new assignment. To do this, we elicit some of the
preferences missing in the neighbor assignments. The
algorithm stops when a given limit on the number of
steps is reached. Experimental results on randomly
generated fuzzy CSPs with missing preferences show
that our local search approach is promising, in terms
of percentage of elicited preferences, solution quality,
582
Gelain M., Pini M., Rossi F., Brent Venable K. and Walsh T..
A LOCAL SEARCH APPROACH TO SOLVE INCOMPLETE FUZZY CSPs.
DOI: 10.5220/0003174505820585
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 582-585
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

and scaling properties.
Incompleteness in soft constraints has also been
considered in (Fargier et al., 1996; Pini et al., 2010).
However, incomplete knowledge in these contexts is
represented by the presence of uncontrollable vari-
ables, i.e., variables such that the agent has not the
power to fix their value, and not by the presence of
missing preferences.
A preliminary version of some results of the paper
is contained in (Gelain et al., 2010b)
1
.
2 BACKGROUND
We now give some basic notions about incomplete
fuzzy constraint problems and local search.
Incomplete Fuzzy Problems. Incomplete Fuzzy
constraint problems (IFCSPs) (Gelain et al.,
2010a) extend Fuzzy Constraint Problems (FC-
SPs) (Bistarelli et al., 1997) to deal with partial
information. In FCSPs preference values are between
0 and 1, the preference of a solution is the minimum
preference value contributed by the constraints, and
the optimal solutions are those with the highest value.
More formally, given a set of variables V with fi-
nite domain D, an incomplete fuzzy constraint is a pair
hide f, coni where con ⊆ V is the scope of the con-
straint and idef : D
|con|
−→ ([0, 1] ∪ {?}) is the pref-
erence function of the constraint associating to each
tuple of assignments to the variables in con either a
preference value that belongs to the set [0, 1], or ?. All
tuples mapped into ? by idef are called incomplete tu-
ples, meaning that their preference is unspecified.
Given an assignment s to all the variables of
an IFCSP P, pref(P, s) is the preference of s in
P. More precisely, it is defined as pref(P, s) =
min
<idef ,con>∈C|idef (s
↓con
)6=?
ide f(s
↓con
). In words, the
preference of an assignment s in an IFCSP is obtained
by taking the minimum of the known preferences as-
sociated to the projections of the assignment, that is,
of the appropriated sub-tuples in the constraints.
In the fuzzy context, a complete assignment of
values to all the variables is an optimal solution if its
preference is maximal. This optimality notion is gen-
eralized to IFCSPs via the notion of necessarily op-
timal solutions, that is, complete assignments which
are maximal no matter the value of the unknown pref-
erences.
1
Research partially supported by the Italian MIUR
PRIN project 20089M932N: “Innovative and multidisci-
plinary approaches for constraint and preference reason-
ing”.
In (Gelain et al., 2010a) several algorithms are
proposed to find a necessarily optimal solution of
an IFCSP. All these algorithms follow a branch and
bound schema where search is interleaved with elici-
tation. Elicitation is needed since the given problem
may have an empty set of necessarily optimal solu-
tions. By eliciting more preferences, this set eventu-
ally becomes non-empty. Several elicitation strategies
are considered in (Gelain et al., 2010a) in the attempt
to elicit as little as possible before finding a necessar-
ily optimal solution.
Local Search. Local search (Hoos and Stutzle,
2004) is one of the fundamental paradigms for solving
computationally hard combinatorial problems. Given
a problem instance, the basic idea underlying local
search is to start from an initial search position in
the space of all possible assignments (typically a ran-
domly or heuristically generated assignment, which
may be infeasible, sub-optimal or incomplete), and to
improve iteratively this assignment by means of mi-
nor modifications. At each search step we move to a
new assignment selected from a local neighborhood,
chosen via a heuristic evaluation function. This pro-
cess is iterated until a termination criterion is satis-
fied. The termination criterion is usually the fact that
a solution is found or that a predetermined number
of steps is reached. To ensure that the search process
does not stagnate, most local search methods make
use of random moves: at every step, with a certain
probability a random move is performed rather than
the usual move to the best neighbor. Another way to
prevent local search from locking in a local minima
is Tabu search (Glover and Laguna, 1997) that uses
a short term memory to prevent the search from re-
turning to recently visited assignments for a specified
amount of steps.
A local search approach has been defined in
(Aglanda et al., 2004) for soft constraints. Here we
adapt it to deal with incompleteness.
3 LOCAL SEARCH ON IFCSPs
We will now present our local search algorithm for
IFCSPs that interleaves elicitation with search. We
basically follow the same algorithm as in (Codognet
and Diaz, 2001), except for the following.
To start, we randomly generate an assignment of
all the variables. To assess the quality of such an as-
signment, we compute its preference. However, since
some missing preferences may be involvedin the cho-
sen assignment, we ask the user to reveal them.
A LOCAL SEARCH APPROACH TO SOLVE INCOMPLETE FUZZY CSPs
583

In each step, when a variable is chosen, its local
preference is computed by setting all the missing pref-
erences to the preference value 1. To choose the new
value for the selected variable, we compute the pref-
erences of the assignments obtained by choosing the
other values for this variable. Since some preference
values may be missing, in computing the preference
of a new assignment we just consider the preferences
which are known at the current point. We then choose
the value which is associated to the best new assign-
ment. If two values are associated to assignmentswith
the same preference, we choose the one associated to
the assignment with the smaller number of incomplete
tuples. In this way, we aim at moving to a new assign-
ment which is better than the current one and has the
fewest missing preferences.
Since the new assignment, say s
′
, could have in-
complete tuples, we ask the user to reveal enough of
this data to compute the actual preference of s
′
. We
call ALL the elicitation strategy that elicits all the
missing preferences associated to the tuples obtained
projecting s
′
on the constraints, and we call WORST
the elicitation strategy that asks the user to reveal only
the worst preference among the missing ones, if it is
less than the worst known preference. This is enough
to compute the actual preference of s
′
since the prefer-
ence of an assignment coincides with the worst pref-
erence in its constraints.
As in many classical local search algorithms, to
avoid stagnation in local minima, we employ tabu
search and random moves. Our algorithm has two
parameters: p, which is the probability of a random
move, and t, which is the tabu tenure. When we have
to choose a variable to re-assign, the variable is either
randomly chosen with probability p or, with proba-
bility (1-p) and we perform the procedure described
above. Also, if no improving moveis possible, i.e., all
new assignments in the neighborhood are worse than
or equal to the current one, then the chosen variable is
marked as tabu and not used for t steps.
During search, the algorithm maintains the best
solution found so far, which is returned when the
maximum number of allowed steps is exceeded. We
will show later that, even when the returned solution
is a necessarily optimal solution, its quality is not very
far from that of the necessarily optimal solutions.
4 EXPERIMENTAL RESULTS
The test sets for IFCSPs are created using a gener-
ator that has the following parameters: n: number
of variables; m: cardinality of the variable domains;
d: density, i.e., the percentage of binary constraints
present in the problem w.r.t. the total number of pos-
sible binary constraints that can be defined on n vari-
ables; t: tightness, i.e., the percentage of tuples with
preference 0 in each constraint and in each domain
w.r.t. the total number of tuples; i: incompleteness,
i.e., the percentage of incomplete tuples (i.e., tuples
with preference ?) in each constraint and in each do-
main. Our experiments measure the percentage of
elicited preferences (overall the missing preferences),
the solution quality (as the normalized distance from
the quality of necessarily optimal solutions), and the
execution time, as the generation parameters vary.
We first considered the quality of the returned so-
lution. To do this, we computed the distance be-
tween the preference of the returned solution and that
of the necessarily optimal solution returned by algo-
rithm FBB (which stands for fuzzy branch and bound)
which is one of the best algorithms in (Gelain et al.,
2010a). In (Gelain et al., 2010a), this algorithm cor-
responds to the one called DPI.WORST.BRANCH.
Such a distance is measured as the percentage over
the whole range of preference values. For example, if
the preference of the solution returned is 0.4 and the
one of the solution given by FBB is 0.5, the prefer-
ence error reported is 10%. A higher error denotes a
lower solution quality.
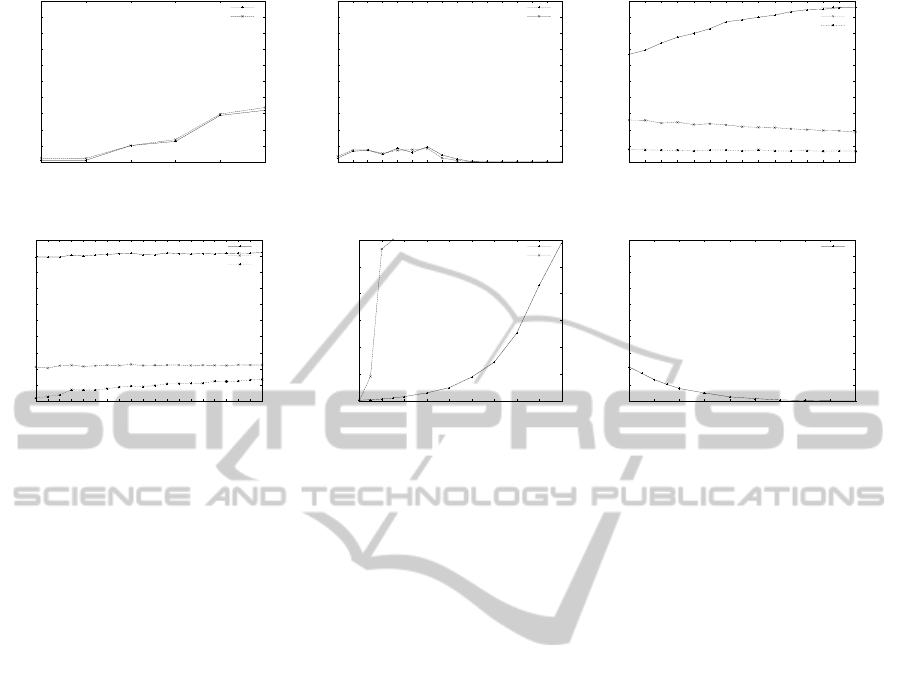
Figures 1(a) and 1(b) show the preference er-
ror when the number of variables and tightness vary
(please notice that the y-axis ranges from 0% to 10%).
We can see that the error is always very small and its
maximum value is 3.5% when we consider problems
with 20 variables. In most of the other cases, it is be-
low 1.5%. We also can notice that the solution quality
is practically the same for both elicitation strategies.
If we look at the percentage of elicited prefer-
ences (Figures 1(c) and 1(d)), we can see that the
WORST strategy elicits always less preferences than
ALL, eliciting only 20% of incomplete preferences in
most of the cases. The FBB algorithm elicits about
half as many preferences as WORST. Thus, with 10
variables, FBB is better than our local search ap-
proach, since it guarantees to find a necessarily opti-
mal solution while eliciting a smaller number of pref-
erences.
We also tested the WORST strategies varying the
number of variables from 10 to 100. In Figure 1(f) we
show how the elicitation varies up to 100 variables. It
is easy to notice that with more than 70 variables the
percentage of elicited preferences decreases. This is
because the probabilityof a complete assignmentwith
a 0 preference arises (since density remains the same).
Moreover, we can see how the local search algorithms
can scale better than the branch and bound approach.
In Figure 1(e) the FBB reaches a time limit of 10 min-
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
584
0
1
2
3
4
5
6
7
8
9
10
5 8 11 14 17 20
preference error
number of variables
ALL
WORST
(a) Solution quality varying n.
0
1
2
3
4
5
6
7
8
9
10
5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80
preference error
tightness
ALL
WORST
(b) Solution quality varying t.
0
10
20
30
40
50
60
70
80
90
100
10 15 20 25 30 35 40 45 50 55 60 65 70 75 80
percentage of elicited preferences
density
ALL
WORST
FBB
(c) Elicited preferences varying d.
0
10
20
30
40
50
60
70
80
90
100
5 10 15 20 25 30 35 40 45 50 55 60 65 70 75 80 85 90 95 100
percentage of elicited preferences
incompleteness
ALL
WORST
FBB
(d) Elicited preferences varying i.
0
100000
200000
300000
400000
500000
600000
10 20 30 40 50 60 70 80 90 100
execution time (msec.)
number of variables
WORST
FBB
(e) Execution time varying n.
0
10
20
30
40
50
60
70
80
90
100
10 20 30 40 50 60 70 80 90 100
percentage of elicited preferences
number of variables
WORST
(f) Elicited preferences varying n.
Figure 1: Step limit 100000, tabu steps 1000,random walk probability 0.2, average on 100 problems, default values: d=50%
(for Figures (a), (b), and (d)), d=35% (for Figures (e) and (f)), i=30%, t=10%, n=10, m = 5.
utes with just 25 variables, while the WORST algo-
rithm needs the same time to solve instances of size
100.
5 CONCLUSIONS
We developed and tested a local search algorithm
to solve incomplete fuzzy CSPs. We tested differ-
ent elicitation strategies and our best strategies have
shown good results compared with the branch and
bound solver described in (Gelain et al., 2010a). More
precisely, our local search approach shows a very
good solution quality when compared with complete
algorithms. In addition it shows better scaling prop-
erties than such a complete method.
REFERENCES
Aglanda, A., Codognet, P., and Zimmer, L. (2004). An
adaptive search for the NSCSPs. In Proc. CSCLP’04.
Bistarelli, S., Montanari, U., and Rossi, F. (1997).
Semiring-based constraint solving and optimization.
Journal of the ACM, 44(2):201–236.
Codognet, P. and Diaz, D. (2001). Yet another local search
method for constraint solving. In Proc. SAGA’01.
Fargier, H., Lang, J., and Schiex, T. (1996). Mixed con-
straint satisfaction: a framework for decision prob-
lems under incomplete knowledge. In Proceedings of
AAAI’96, volume 1, pages 175–180. AAAI Press.
Gelain, M., Pini, M. S., Rossi, F., and Venable, K. B. (2007).
Dealing with incomplete preferences in soft constraint
problems. In Proc. CP’07, LNCS 4741, pages 286–
300. Springer.
Gelain, M., Pini, M. S., Rossi, F., Venable, K. B., and
Walsh, T. (2008). Dealing with incomplete prefer-
ences in soft constraint problems. In Proc. CP’08,
LNCS 5202, pages 402–417. Springer.
Gelain, M., Pini, M. S., Rossi, F., Venable, K. B., and
Walsh, T. (2010a). Elicitation strategies for soft con-
straint problems with missing preferences: Proper-
ties, algorithms and experimental studies. AI Journal,
174(3-4):270–294.
Gelain, M., Pini, M. S., Rossi, F., Venable, K. B., and
Walsh., T. (2010b). A local search approach to solve
incomplete fuzzy and weighted csps. In Proc. CP’10
Workshop on Preferences and Soft Constraints.
Glover, F. and Laguna, M. (1997). Tabu Search. Kluwer,
Norwell, MA.
Hoos, H. H. and Stutzle, T. (2004). Stochastic Local Search:
Foundations and Applications. Elsevier - Morgan
Kaufmann.
Pini, M. S., Rossi, F., and Venable, K. B. (2010). Soft con-
straint problems with uncontrollable variables. Jour-
nal of Experimental & Theoretical Artificial Intelli-
gence.
Rossi, F., Beek, P. V., and Walsh, T. (2006). Handbook of
Constraint Programming. Elsevier.
A LOCAL SEARCH APPROACH TO SOLVE INCOMPLETE FUZZY CSPs
585
