
A GENOME BASED VISION OF MULTI-AGENT SYSTEMS
Monica Vitali
Universit
`
a degli studi di Palermo, viale delle Scienze, Palermo, Italy
Massimo Cossentino, Riccardo Rizzo
CNR-ICAR Palermo, viale delle Scienze, Palermo, Italy
Salvatore Gaglio
Universit
`
a degli studi di Palermo and CNR-ICAR Palermo, viale delle Scienze, Palermo, Italy
Keywords:
Agent models and architectures, Multi-agent systems, adaptation.
Abstract:
A set of software agents can be programmed to provide a large but finite set of services, often defined during
design phase. After an evolution of the external environment, the pre-defined services could be unable to
satisfy the requested quality. In this work an agent framework is proposed capable to adapt the agents in order
to improve the quality of services provided by an agent society in correspondence with a modification of the
external environment. These agents are based on a biologically inspired structure (genome), that defines all
their behaviors and knowledges.
1 INTRODUCTION
Agent Oriented Systems should be able to au-
tonomously adapt and deliver new services in re-
sponse to unforeseeable problems, like many living
things do. In living things this characteristic is mainly
based on genome and natural selection. We propose
to replicate this mechanism in Agent Oriented Soft-
ware and Agent Systems.
In the proposed system agents capabilities are de-
scribed in their genome and their improvement is pos-
sible by means of a Darwinian evolution. When a so-
lution to a problem is not achievable (the correspond-
ing service is not available or it does not provide the
required quality of service), several agents can re-
produce themselves thus creating a new generation
of agents that have new capabilities and can satisfy
the requirements. The consequence of this behavior
is the creation of an adaptive system (Gleizes et al.,
1999) realized through an extensive adoption of Ge-
netic Programming techniques (Koza, 1992) and au-
tomatic code generation, compilation and execution.
The focus of our attention is not on the agent it-
self, but on its genetic makeup: the genome. This ge-
netic makeup can be decomposed in different layers.
In the first layer of the genome there are two kinds
of chromosomes: a Knowledge Chromosome which
describes knowledge about the environment and a set
of Ability Chromosomes which describe agent’s abil-
ities to interact with the world. At a deeper layer we
have genes. Each chromosome is made of genes. In
the Knowledge Chromosome, each gene describes an
element of the knowledge (predicates, concepts and
actions), while, genes within Ability Chromosomes
describe plans components.
During the designing process it is essential to de-
fine and manipulate the genome. In the definition of
the genome an initial set of genes is given. This set
does not have to contain the solution but only the ele-
ments which allow the creation of the first generation.
From this initial set, through manipulation, genes
are combined and activated originating new genomes.
These genomes have to be evaluated through an ob-
jective function for measuring their level of adapta-
tion to the required skill.
The agent adaptation procedure is represented in
Fig.1. This process is started by an agent called
CrosserAgent after a request for an unavailable ser-
vice is received. The CrosserAgent creates new gen-
erations which will contain some agents inherited
406
Vitali M., Cossentino M., Rizzo R. and Gaglio S..
A GENOME BASED VISION OF MULTI-AGENT SYSTEMS.
DOI: 10.5220/0003165204060409
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 406-409
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

Figure 1: A representation of the adaptation procedure.
GenomeAgents are represented in white. The agent selected
at the end of the procedure is marked with an “X”, while the
CrosserAgent is marked with a “C”.
from the previous generation and some new agents
obtained crossing the agents’ genomes. The num-
ber of individuals per generation is a parameter of
the adaptation process. During the adaptation process
two agents merge their chromosomes according to the
rules of genetic programming that will be discussed
later. The parents transmit their genes to the child
which evolves and gains the capability of reaching
different results. The adaptation process ends when
an agent in the current generation provides a satisfy-
ing service or if an a priori defined number of gener-
ations has been reached. The fittest agent is selected
and becomes a member of the society. The CrosserA-
gent notifies its name to the requesting agent in order
to fulfill the service request. This process will be dis-
cussed more in details in section 3.
2 THE GENOME STRUCTURE
This section introduces the Genome structure shown
in form of an UML class diagram in Fig.2. This fig-
ure highlights the two main parts in which the genome
can be decomposed at a logical level: knowledge and
abilities. The division is pointed out through the in-
clusion of chromosomes in two different packages.
Starting from the higher level, the genome (at the
top of Fig.2) contains all the information needed to
describe the agent; from this information a new agent
can be created.
The genome enables a set of Services which
makes explicit the functions offered by the agent to
the external environment. The genome is composed
of a KnowledgeChromosome and a set of AbilityChro-
mosomes.
The KnowledgeChromosome aggregates genes
which refer to ontological concepts (OntologyGene)
and that are specialized in three categories: (i) Con-
ceptGene: describes an instance of a concept of the
ontology; (ii) ActionGene: describes an instance of an
action of the ontology; (iii) PredicateGene: describes
an instance of a predicate of the ontology.
The AbilityChromosome is composed of a set of
node genes which describe the plan structure (Node-
Gene) and by the contents of these nodes which de-
scribe the action associated to them. Node contents
can be of three different kinds: predicate or action
genes (indicated as PredicateGene and ActionGene in
Fig.2) or other Ability Chromosomes. Plugging in an
Ability Chromosome with a node allows us to asso-
ciate a behavior, described by another plan, to a node,
thus creating a sort of recursive structure. There are
four kinds of nodes: StartNodeGene, EndNodeGene,
ActionNodeGene and IfNodeGene. The node classi-
fication reported here is inspired by (van Der Aalst
et al., 2003).
3 THE AGENT ADAPTATION
PROCESS
The agent adaptation process, led by the CrosserA-
gent, is composed of the following iterative steps:
• definition of the parents’ sub-society: this sub-
society includes all the agents that will be used
in the adaptation process and that contribute with
their ability genes and knowledge genes to the
definition of the resulting agent;
• creation of the new generation by using adaptation
techniques;
• evaluation of the results provided by the new
agents;
• stop of the process if one (or more) agent(s) suc-
cessfully provide the required service.
During the agent adaptation process we create
new generations by using mutation, elitism and cross-
ing techniques. While the first two techniques
are reused from litterature (Banzhaf, 1998)(Mitchell,
1998), crossing is described below.
The agent adaptation process can be divided into
two steps: knowledge crossing and ability crossing.
Knowledge crossing allows to modify the set of
knowledge genes about the environment. Knowl-
edge Chromosomes crossing is inspired by (Noy and
Musen, 1999) and it is performed over each agent’s
knowledge gene by using four techniques:
• Fusion: the two parents’ knowledge genes are
melted in a single gene;
• Selection: one of the parents’ knowledges is cho-
sen while the other one is discarded;
• Union: both of the parents’ knowledges are
copied in the new individual;
A GENOME BASED VISION OF MULTI-AGENT SYSTEMS
407
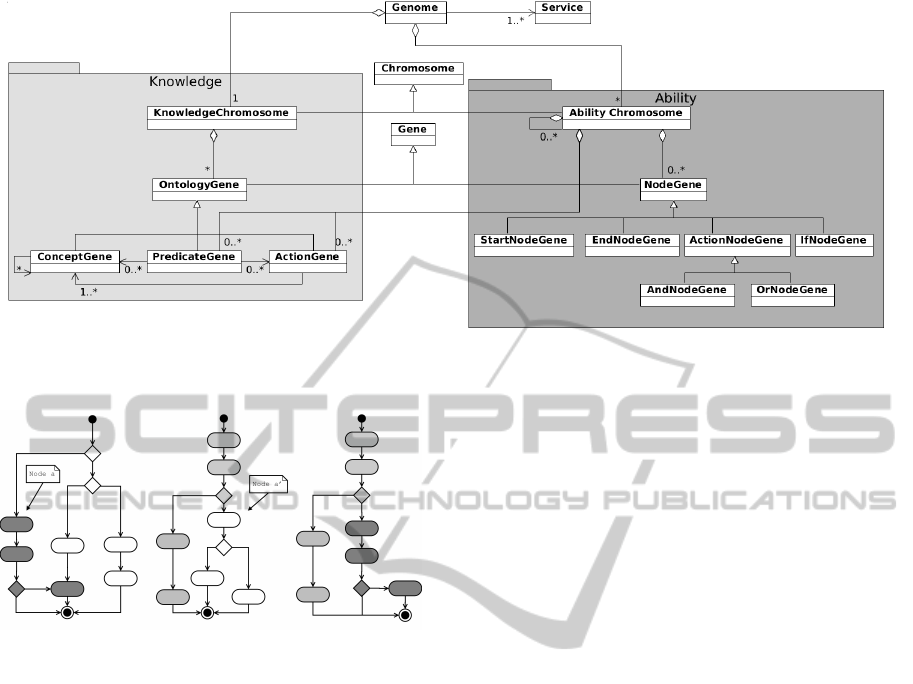
Figure 2: The genome structure. Genome is composed of two kinds of chromosome: Knowledge Chromosome and Ability
Chromosome; both are composed of genes.
Figure 3: On the left the two plans of the parent agents and
on the right the resulting plan. The parts of the plan selected
for the crossover procedure are filled.
• Copy: if a particular portion of knowledge is
present only in one of the parent, it is copied to
the generated agent.
The result is a new Knowledge Chromosome. Once
the knowledge crossing is completed, the ability
crossing can be executed.
Tha ability crossing is performed on the abili-
ties of an agent. Abilities are represented through
plans, composed of nodes, and are labeled with a goal,
which indicates the ability purpose. Agents in the
platform are provided with a higher-level plan which
handles the agent’s life-cycle and allows each agent
to interact with the external environment. This plan
is always crossed by a fusion operation. All the other
plans can be crossed also by using the selection, union
or copy techniques already described in the previous
paragraph. Since selection, union and copy simply
transfers a plan from a parent to its child, the sole op-
eration worth of a discussion is plan fusion and there-
fore it will be discussed in what follows. Fusion can
be performed only if two plans are similar (if they
have the same goal). Plan crossing is shown in Fig.3.
The two parents’ plans play a different role in this part
of the adaptation process. The receiver’s agent plan is
used as the basis for implanting the contribution from
the donor agent. An example of donor and receiver
plan fragments are shown respectively in the right and
the middle part of Fig.3. The two fragments are linked
by replacing a randomly selected node (node a’ in
Fig.3) from the receiver’s plan with the one selected
from the donor’s one (node a and its successors), as
shown in the right part of Fig.3.
4 EXPERIMENTAL RESULTS
In the case study, the initial set of agents is composed
of individuals drawing simple geometrical shapes.
The aim of each agent is to reproduce a given picture,
in the reported example a trapezium (Fig.4a).
The agent divides the picture in small chunks by
using a grid and tries to fill each position of the grid
according to the guidance provided by the target pic-
ture. The work is carried on through several iterations
and each iteration is populated by a different gener-
ation of agents. The initial generation is composed
of two simple agents. Each of them is able to fill
in a grid cell with the shape of a triangle: the first
agent (Fig.4b) draws a dark gray triangle oriented to-
wards the up-left corner of the cell, the second agent
(Fig.4c) draws a light gray triangle oriented towards
the bottom-right corner of the cell.
Clearly none of two agents supply a fulfilling re-
sult; besides, neither the simple cooperation of the
two agents could solve the problem. So that an adap-
tation process is started: the genome codes the color,
dimension and shape of the grid cell together with the
plan used to generate the figure. The evaluation pro-
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
408
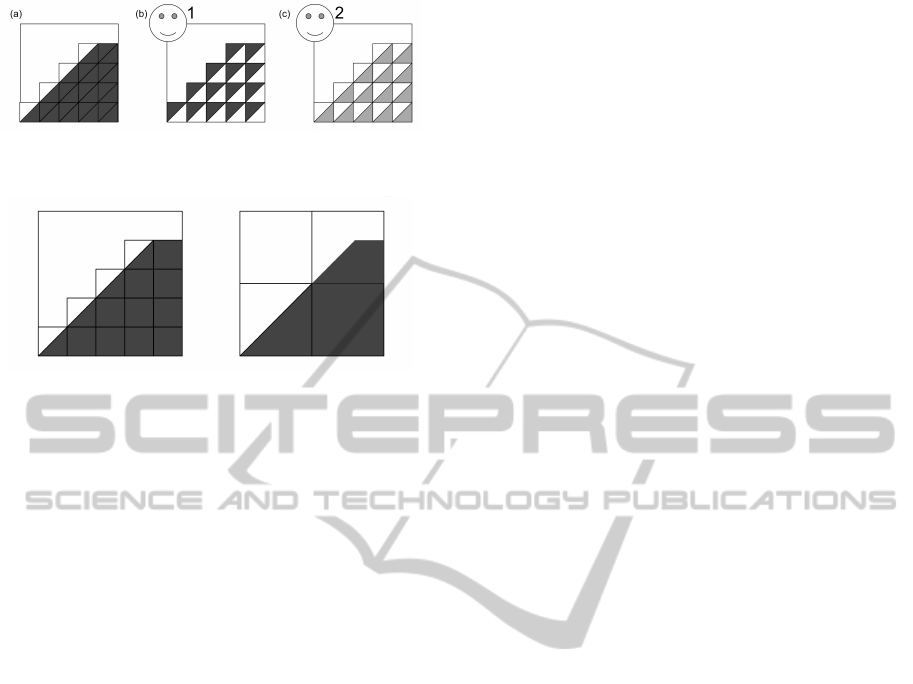
Figure 4: In (a) the target picture. In (b) and (c) the results
achieved by two agents of the initial society.
Figure 5: Two agents which provide the required service in
different ways.
cess compares color and shape of the obtained figure
to the target one.
In our experiments, after about nine generations,
several individuals which perfectly reproduce the de-
sired picture have been created (obviously because of
the random characteristic of the new generations pro-
duction different runs of the experiment may produce
different results). Fig.5 reports two examples of such
individuals; as it is possible to see, the two agents use
a different grid to decompose the target picture.
The test case has been evaluated with different
pictures and colors. It has been observed, as it was
expected, that the number of generations needed to
reach a perfectly fitting outcome grows up with the
complexity of the target picture.
The adopted adaptation process proved to be suc-
cessful but it is to be noted that the development
framework is undoubtedly complex in its use and the
setup of a new experiment requires a lot of program-
ming.
5 CONCLUSIONS AND FUTURE
WORKS
In this paper we proposed a service adaptation mech-
anism as an integral part of an agent-oriented adaptive
and self-organizing society. As a first step towards our
goal we tested an adaptive system inspired by the Dar-
winian evolution theory where all the agents’ features
are codified in a genome-like structure. In order to im-
prove the quality of a given service, several agents can
reproduce and generate new individuals which better
fit the target. These individuals are provided with new
capabilities derived by their parents. The approach
has been tested through simple case studies. The ap-
plication reported in this paper proves that it is possi-
ble to obtain a perfectly working agent from original
agents which provides a service with a low quality
service. Using the proposed Genome Framework the
problem moves from the implementation of a solution
to the definition of the problem domain.For sure dif-
ferent techniques may be explored (and they will be
in the future) but the goal of the current study is evalu-
ating the adoption of the proposed genome-based de-
scription of agent capabilities and knowledge. The
obtained results encourage the development of further
release of the proposed framework. The use of a for-
malization language to describe the genome structure
might be the following step in order to lay the ground-
work for an agent-oriented language.
REFERENCES
Banzhaf, W. (1998). Genetic Programming: An Introduc-
tion on the Automatic Evolution of computer programs
and its Applications. Morgan Kaufmann.
Gleizes, M.-P., Camps, V., and Glize, P. (1999). A theory
of emergent computation based on cooperative self-
organization for adaptive artificial systems. In In proc.
of Fourth European Congress of Systems Science.
Koza, R. (1992). Genetic Programming: On the Program-
ming of Computers by means of Natural Selection.
MIT Press.
Mitchell, M. (1998). An introduction to genetic algorithms.
The MIT press.
Noy, N. and Musen, M. (1999). An algorithm for merging
and aligning ontologies: Automation and tool support.
In Proceedings of the Workshop on Ontology Manage-
ment at the Sixteenth National Conference on Artifi-
cial Intelligence (AAAI-99), pages 1999–0799.
van Der Aalst, W., Ter Hofstede, A., Kiepuszewski, B., and
Barros, A. (2003). Workflow patterns. Distributed and
parallel databases, 14(1):5–51.
A GENOME BASED VISION OF MULTI-AGENT SYSTEMS
409
