
SELF-ORGANIZING SYNCHRONICITY AND DESYNCHRONICITY
USING REINFORCEMENT LEARNING
Mihail Mihaylov, Yann-A
¨
el Le Borgne, Ann Now
´
e
Vrije Universiteit Brussel, Brussels, Belgium
Karl Tuyls
Maastricht University, Maastricht, The Netherlands
Keywords:
Reinforcement learning, Synchronicity and Desynchronicity, Wireless sensor networks, Wake-up scheduling.
Abstract:
We present a self-organizing reinforcement learning (RL) approach for coordinating the wake-up cycles of
nodes in a wireless sensor network in a decentralized manner. To the best of our knowledge we are the first
to demonstrate how global synchronicity and desynchronicity can emerge through local interactions alone
without the need of central mediator or any form of explicit coordination. We apply this RL approach to
wireless sensor nodes arranged in different topologies and study how agents, starting with a random policy,
are able to self-adapt their behavior based only on their interaction with neighboring nodes. Each agent
independently learns to which nodes it should synchronize to improve message throughput and at the same
with whom to desynchronize in order to reduce communication interference. The obtained results show how
simple and computationally bounded sensor nodes are able to coordinate their wake-up cycles in a distributed
way in order to improve the global system performance through (de)synchronicity.
1 INTRODUCTION
Synchronicity, which can be defined as the ability
of a system to organize simultaneous collective ac-
tions (Werner-Allen et al., 2005), has long attracted
the attention of biologists, mathematicians, and com-
puter scientists. Seminal work on pulse-coupled os-
cillators of Mirollo and Strogatz (Mirollo and Stro-
gatz, 1990) provided a theoretical framework for
modeling the synchronization in biological systems
such as fireflies flashings, heart pacemaker cells, or
cricket chirps. The framework has recently been
applied to systems of digital agents such as in the
emerging field of wireless sensor networks (Knoester
and McKinley, 2009), and to its counterpart, desyn-
chronicity, in (Werner-Allen et al., 2005). In such
multi-agent systems (MASs), synchronicity can be
desirable to allow all agents to synchronously com-
municate, and desynchronicity to ensure that the
communication channel is evenly shared among the
agents.
Little attention has however been given to MASs
where either global synchronicity or global desyn-
chronicity of the system alone is impractical and/or
undesirable. Desynchronicity refers to the state where
the periodical activity of agents is shifted in time
relative to one another, as opposed to synchronic-
ity, where agents’ activities coincide in time. In
most MASs, an optimal solution is intuitively found
where sets of agents synchronize with one another,
but desynchronize with others. Nodes communicat-
ing in a wireless sensor network (WSN) are an ex-
ample, as routing requires the synchronization of sets
of nodes, while channel contention requires sets of
nodes to desynchronize in order to avoid packet col-
lisions. Other examples include traffic lights guiding
vehicles through crossings in traffic control problems
and jobs that have to be processed by the same ma-
chines at different times in job-scheduling problems.
In such cases applying synchronization or desynchro-
nization alone can be detrimental to the system (e.g.
all traffic lights showing green, or complementary
jobs processed at different time).
In these systems, agents should be logically orga-
nized in groups (or coalitions), such that the actions
of agents within the group need to be synchronized,
while at the same time being desynchronized with the
actions of agents in other groups. We refer to this
94
Mihaylov M., Le Borgne Y., Nowé A. and Tuyls K..
SELF-ORGANIZING SYNCHRONICITY AND DESYNCHRONICITY USING REINFORCEMENT LEARNING.
DOI: 10.5220/0003162600940103
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 94-103
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

concept for short as (de)synchronicity (for the system
state), and (de)synchronization (for the process occur-
ring at that state). An important characteristic of these
systems is also that agents need to coordinate their ac-
tions without the need of centralized control.
In this paper, we show that coordinating the ac-
tions of agents (i.e., sensor nodes) can successfully
be done using the reinforcement learning framework
by rewarding successful interactions (e.g., transmis-
sion of a message in a sensor network) and penalizing
the ones with a negative outcome (e.g., overhearing
or packet collisions). This behavior drives nodes to
repeat actions that result in positive feedback more
often and to decrease the probability of unsuccessful
interactions. Agents that tend to select the same suc-
cessful action form a coalition.
A key feature of our approach is that no explicit
notion of coalition is necessary. Rather, these coali-
tions emerge from the global objective of the system,
and agents learn by themselves with whom they have
to (de)synchronize (e.g. to maximize throughput in
a routing problem). Here desynchronization refers to
the situation where one agent’s actions (e.g. waking
up the radio transmitter of a wireless node) are shifted
in time, relative to another, such that the (same) ac-
tions of both agents do not happen at the same time.
For example, two traffic lights at a crossing are desyn-
chronized when the light on one street shows green,
while the other one displays red. In addition, the pat-
terns of these traffic lights need to be synchronized
with those on the nearby crossings to maximize traf-
fic throughput. Thus, globally, one group of lights
at consecutive crossings should be synchronized with
each other and at the same time desynchronized with
others to reach the global objective of high throughput
taking into account the traffic flow.
We illustrate the benefits of combining syn-
chronicity and desynchronicity in a scenario involv-
ing coordination in wireless sensor networks (WSNs).
WSNs form a class of distributed and decentralized
multi-agent systems, whose agents have very limited
computational, communication and energy resources.
A key challenge in these networks lie in the design
of energy efficient coordination mechanisms, in or-
der to maximize the lifetime of the applications. We
apply our self-adapting RL approach in three wire-
less sensor networks of different topologies, namely
line, mesh and grid. We show that nodes form coali-
tions which allow to reduce packet collisions and end-
to-end latency, and thus to increase the network life-
time. This (de)synchronicity is achieved in a decen-
tralized manner, without any explicit communication,
and without any prior knowledge of the environment.
To the best of our knowledge, we are the first to
present a decentralized approach to coordination in
WSNs without any communication overhead in the
form of additional data required by the learning algo-
rithm.
The paper is organized as follows. Section 2
guides the reader through some related work. It
presents the background of our study and outlines the
communication and routing protocols. The idea be-
hind our approach is exposed in Section 3, together
with its application in WSNs of three different topolo-
gies. The results of this work are analyzed in Sec-
tion 4 shortly before we conclude in Section 5.
2 RELATED WORK
We proceed with the literature review on two
fronts. We first present the challenging problem of
(de)synchronization (also known as wake-up schedul-
ing) in sensor networks, and then provide an overview
of the synchronization (and desynchronization) mech-
anisms which have been proposed in the literature to
solve the problem.
2.1 Wireless Sensor Networks:
Coordination Challenges
A Wireless Sensor Network is a collection of densely
deployed autonomous devices, called sensor nodes,
which gather data with the help of sensors (Ilyas and
Mahgoub, 2005). The untethered nodes use radio
communication to transmit sensor measurements to a
terminal node, called the sink. The sink is the access
point of the observer, who is able to process the dis-
tributed measurements and obtain useful information
about the monitored environment. Sensor nodes com-
municate over a wireless medium, by using a multi-
hop communication protocol that allows data packets
to be forwarded by neighboring nodes to the sink.
When the WSN is deployed, the routing protocol
requires that nodes determine their hop distance to the
sink, i.e. the minimum number of nodes that will
have to forward their packets. This is achieved by
nodes broadcasting calibration packets only once im-
mediately after deployment. Communication is done
via a standard DATA/ACK protocol and messages are
routed according to a shortest path algorithm with re-
spect to the hop distance (Ilyas and Mahgoub, 2005).
Nodes will start sending a packet at a random slot
within the awake period to increase the chances of
successful transmission for nodes that wake up at the
same time.
Since communication is the most energy expen-
sive action (Langendoen, 2008), it is clear that in or-
SELF-ORGANIZING SYNCHRONICITY AND DESYNCHRONICITY USING REINFORCEMENT LEARNING
95

der to save more energy, a node should turn off its
antenna (or go to sleep). However, when sleeping,
the node is not able to send or receive any messages,
therefore it increases the latency of the network, i.e.,
the time it takes for messages to reach the sink. High
latency is undesirable in any real-time applications.
On the other hand, a node does not need to listen to
the channel when no messages are being sent, since it
loses energy in vain. As a result, nodes should deter-
mine on their own when they should be awake within
a frame. This behavior is called wake-up scheduling.
Once a node wakes up, it remains active for a prede-
fined amount of time, called duty cycle.
Wake-up scheduling in wireless sensor networks
is an active research domain (Liang et al., 2007;
Paruchuri et al., 2004; Liu and Elhanany, 2006; Co-
hen and Kapchits, 2009). A good survey on wake-up
strategies in WSNs is presented in (Schurgers, 2007).
In (Paruchuri et al., 2004) a randomized algorithm for
asynchronous wake-up scheduling is presented that
relies on densely deployed sensor nodes with means
of localization. It also requires additional data to be
piggybacked to messages in order to allow for mak-
ing local decisions, based on other nodes. This book-
keeping of neighbors’ schedules, however, introduces
larger memory requirements and imposes significant
communication overhead. A different asynchronous
protocol for generating wake-up schedules (Zheng
et al., 2003) is formulated as a block design prob-
lem with derived theoretical bounds. The authors
derive theoretical bounds under different communi-
cation models and propose a neighbor discovery and
schedule bookkeeping protocol operating on the opti-
mal wake-up schedule derived. However, both proto-
cols rely on localization means and incur communica-
tion overhead by embedding algorithm-specific data
into packets. Adding such data to small packets will
decrease both the throughput and the lifetime of the
network.
A related approach that applies reinforcement
learning in WSNs is presented in (Liu and Elhanany,
2006). As in the former two protocols, this ap-
proach requires nodes to include additional data in the
packet header in order to measure the incoming traffic
load. Moreover, the learning algorithm requires frame
boundaries to be aligned in addition to slot bound-
aries.
2.2 Coordination and Cooperative
Behavior
Coordination and cooperative behavior has recently
been studied for digital organisms in (Knoester and
McKinley, 2009), where it is demonstrated how pop-
ulations of such organisms are able to evolve algo-
rithms for synchronization based on biologically in-
spired models for synchronicity while using minimal
information about their environment. Synchroniza-
tion in WSNs, based on the Reachback Firefly Algo-
rithm for synchronicity, is more specifically applied
to WSNs in (Werner-Allen et al., 2005). The purpose
of the study is to investigate the realistic radio effects
of synchronicity in WSNs. Two complementary pub-
lications to the aforementioned work present the con-
cept of desynchronicity in wireless sensor networks as
the logical opposite of synchronicity (Degesys et al.,
2007; Patel et al., 2007), where nodes perform their
periodic tasks as far away as possible from all other
nodes. Agents achieve that in a decentralized way
by observing the firing messages of their neighbors
and adjusting their phase accordingly, so that all fir-
ing messages are uniformly distributed in time.
The latter three works are based on the firefly-
inspired mathematical model of pulse-coupled oscil-
lators, introduced by Mirollo and Strogatz (Mirollo
and Strogatz, 1990). In this seminal paper the authors
proved that, using a simple oscillator adjustment func-
tion, any number of pulse-coupled oscillators would
always converge to produce global synchronicity irre-
spective of the initial state. More recently, Lucarelli
and Wang (Lucarelli and Wang, 2004) applied this
concept in the field of WSNs by demonstrating that
it also holds for multi-hop topologies.
The underlying assumption in all of the above
work on coordination is that agents can observe each
other’s actions (or frequencies) and thus adapt their
own policy (or phase), such that the system is driven
to either full synchronicity or full desynchronicity, re-
spectively. However, there are cases where agents are
not able to observe the actions of others, thus render-
ing the above approaches inapplicable for such do-
mains. For example sensor nodes could be in sleep
mode while their neighbors wake up, thus they are
unable to detect this event and adjust their wake-
up schedule accordingly. Moreover, achieving either
global synchronicity or global desynchronicity alone
in most WSNs can be impractical or even detrimental
to the system (see Section 1). In Section 3 we will
present how we tackle these challenges using our de-
centralized reinforcement learning approach.
A related methodology is the collective intelli-
gence framework (Wolpert and Tumer, 2008). It stud-
ies how to design large multi-agent systems, where
selfish agents learn to optimize a private utility func-
tion, so that the performance of a global utility is in-
creased. This framework, however, requires agents
to store and propagate additional information, such
as neighborhood’s efficiency, in order to compute the
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
96

world utility, to which they compare their own perfor-
mance. The approach therefore causes a communi-
cation overhead, which is detrimental to the network
lifetime.
3 (DE)SYNCHRONICITY WITH
REINFORCEMENT LEARNING
This section presents our decentralized approach to
(de)synchronicity using the reinforcement learning
framework. The proposed approach requires very few
assumptions on the underlying networking protocols,
which we discuss in Section 3.1. The subsequent sec-
tions detail the different components of the reinforce-
ment learning mechanism.
3.1 Motivations and Network Model
All the previous approaches discussed in Section 2 re-
quire the agents to exchange information to achieve
coordination. An important feature of our approach
is that coordination is not explicitly agreed upon, but
rather emerges as a result of the implicit communica-
tion generated by the data collection process.
Communication in WSNs is achieved by means
of networking protocols, and in particular by means
of the Medium Access Control (MAC) and the rout-
ing protocols (Ilyas and Mahgoub, 2005). The
MAC protocol is the data communication proto-
col concerned with sharing the wireless transmission
medium among the network nodes. The routing pro-
tocol allows to determine where sensor nodes have to
transmit their data so that they eventually reach the
sink. A vast amount of literature exists on these two
topics (Ilyas and Mahgoub, 2005), and we sketch in
the following the key requirements for the MAC and
routing protocols so that our reinforcement learning
mechanism presented in Section 3.2 can be imple-
mented. We emphasize that these requirements are
very loose.
We use a simple asynchronous MAC protocol
that divides the time into small discrete units, called
frames, where each frame is further divided into time
slots. The frame and slot duration are application de-
pendent and in our case they are fixed by the user prior
to network deployment. The sensor nodes then rely
on a standard duty cycle mechanism, in which the
node is awake for a predetermined number of slots
during each period. The awake period is fixed by the
user, while the wake-up slot is initialized randomly
for each node. These slots will be shifted as a result
of the learning, which will coordinate nodes’ wake-
up schedules in order to ensure high data throughput
and longer battery life. Each node will learn to be in
active mode when its parents and children are awake,
so that it forwards messages faster (synchronization),
and stay asleep when neighboring nodes on the same
hop are communicating, so that it avoids collisions
and overhearing (desynchronization).
The routing protocol is not explicitly part of the
learning algorithm and therefore any multi-hop rout-
ing scheme can be applied without losing the prop-
erties of our approach. In the experimental results,
presented in Section 4, the routing is achieved using a
standard shortest path multi-hop routing mechanism
(cf. Section 2.1). The forwarding nodes need not
be explicitly known, as long as they ensure that their
distance to the sink is lower than the sender. Com-
munication is done using a Carrier Sense Multiple
Access (CSMA) protocol. Successful data reception
is acknowledged with an ACK packet.We would like
to note that the acknowledgment packet is necessary
for the proper and reliable forwarding of messages.
Our algorithm does use this packet to indicate a “cor-
rect reception” in order to formulate one of its reward
signals (see Subsection 4.1). However, this signal is
not crucial for the RL algorithm and thus the latter
can easily function without acknowledgment packets.
Subsection 3.3 will further elaborate on the use of re-
ward signals.
It is noteworthy that the communication partners
of a node (and thus the formation of coalitions) are
influenced by the communication and routing proto-
cols that are in use and not by our algorithm itself.
These protocols only implicitly determine the direc-
tion of the message flow and not who will forward
those messages, since nodes should find out the latter
by themselves.
Figure 1: Examples of routing and coalition formation.
Depending the routing protocol, coalitions (e.g.,
synchronized groups of nodes) logically emerge
across the different hops, such that there is, if possi-
ble, only one agent from a certain hop within a coali-
tion. Figure 1 illustrates this concept in three differ-
ent topologies. It shows as an example how coalitions
form as a result of the routing protocol. Intuitively,
nodes from one coalition need to synchronize their
wake-up schedules. As defined by the routing pro-
SELF-ORGANIZING SYNCHRONICITY AND DESYNCHRONICITY USING REINFORCEMENT LEARNING
97

tocol, messages are not sent between nodes from the
same hop, hence these nodes should desynchronize
(or belong to separate coalitions) to avoid communi-
cation interference. The emergence of coalitions will
be experimentally illustrated for different topologies
in Section 4.
3.2 Reinforcement Learning Approach:
Methodology
Each agent in the WSN uses a reinforcement learn-
ing (RL) (Sutton and Barto, 1998) algorithm to learn
an efficient wake-up schedule (i.e. when to remain
active within the frame) that will improve through-
put and lifetime in a distributed manner. It is clear
that learning in multi-agent systems of this type re-
quires careful exploration in order to make the action-
values of agents converge. We use a value iteration
approach similar to single-state Q-learning (Watkins,
1989) with an implicit exploration strategy, as subsec-
tion 3.5 will further elaborate on. However, our up-
date scheme differs from that of traditional Q-learning
(cf. subsection 3.4). The battery power required to
run the algorithm is marginal to the communication
costs and thus it is neglected. The main challenge
in such a decentralized approach is to define a suit-
able reward function for the individual agents that will
lead to an effective emergent behavior as a group. To
tackle this challenge, we proceed with the definition
of the basic components of the reinforcement learning
algorithm as used by our methodology in the context
of our application.
3.3 Actions and Rewards
The actions of each agent are restricted to selecting
a time window (or a wake period) within a frame for
staying awake. Since the size of these frames remains
unchanged and they constantly repeat throughout the
network lifetime, our agents use no notion of states,
i.e. we say that our learning system is stateless. The
duration of this wake period is defined by the duty cy-
cle, fixed by the user of the system. In other words,
each node selects a slot within the frame when its ra-
dio will be switched on for the duration of the duty
cycle. Thus, the size of the action space of each
agent is determined by the number of slots within a
frame. In general, the more actions agents have, the
slower the reinforcement learning algorithm will con-
verge (Leng, 2008). On the other hand, a small action
space might lead to suboptimal solutions and will im-
pose an energy burden on the system. Setting the right
amount of time slots within a frame requires a study
on itself, that we shall not undertake in this paper due
to space restrictions (see subsection 4.1 for exact val-
ues).
Every node stores a “quality value” (or Q-value)
for each slot within its frame. This value for each
slot indicates how beneficial it is for the node to stay
awake during these slots for every frame, i.e. what is
an efficient wake-up pattern, given its duty cycle and
considering its communication history. When a com-
munication event occurs at a node (overheard, sent
or received a packet) or if no event occurred during
the wake period (idle listening), that node updates the
quality-value of the slot(s) when this event happened.
The motivation behind this scheme is presented in
subsection 3.5.
3.4 Updates and Action Selection
The slots of agents are initiated with Q-values drawn
from a uniform random distribution between 0 and 1.
Whenever events occur during node’s active period,
that node updates the quality values of the slots, at
which the corresponding events occurred, using the
following update rule:
Q
i
s
← (1 −α) ·
ˆ
Q
i
s
+ α · r
i
s,e
where Q
i
s
∈ [0, 1] is the quality of slot s within the
frame of agent i. Intuitively, a high Q
i
s
value indicates
that it is beneficial for agent i to stay awake during slot
s. This quality value is updated using the previous Q-
value (
ˆ
Q
i
s
) for that slot, the learning rate α ∈ [0, 1], and
the newly obtained reward r
i
s,e
∈ [0, 1] for the event e
that (just) occurred in slot s. Thus, nodes will update
as many Q-values as there are events during its active
period. In other words, agent i will update the value
Q
i
s
for each slot s where an event e occurred. The
latter update scheme differs from that of traditional Q-
learning (Watkins, 1989), where only the Q-value of
the selected action is updated. The motivation behind
this update scheme is presented in subsection 3.5. In
addition, we set here the future discount parameter γ
to 0, since our agents are stateless (or single-state).
Nodes will stay awake for those consecutive time
slots that have the highest sum of Q-values. Put dif-
ferently, each agent selects the action a
s
0
(i.e., wake
up at slot s
0
) that maximizes the sum of the Q-values
for the D consecutive time slots, where D is the duty
cycle, fixed by the user. Formally, agent i will wake
up at slot s
0
, where
s
0
= argmax
s∈S
D
∑
j=0
Q
i
s+ j
For example, if the required duty cycle of the nodes
is set to 10% (D = 10 for a frame of S = 100 slots),
each node will stay active for those 10 consecutive
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
98

slots within its frame that have the highest sum of Q-
values. Conversely, for all other slots the agent will
remain asleep, since its Q-values indicate that it is less
beneficial to stay active during that time. Nodes will
update the Q-value of each slot for which an event
occurrs within its duty cycle. Thus, when forwarding
messages to the sink, over time, nodes acquire suffi-
cient information on “slot quality” to determine the
best period within the frame to stay awake. This be-
haviour makes neighbouring nodes (de)synchronize
their actions, resulting in faster message delivery and
thus lower end-to-end latency.
3.5 Exploration
As explained in the above two subsections, active
time slots are updated individually, regardless of
when the node wakes up. The reason for this choice
is threefold. Firstly, this allows each slot to be ex-
plored and updated more frequently. For example,
slot s will be updated when the node wakes up any-
where between slots s − 1 and s − D + 1, i.e. in D
out of S possible actions. Secondly, updating individ-
ual Q-values makes it possible to alter the duty cycle
of nodes at run time (as suggest some preliminary re-
sults, not displayed in this paper) without invalidating
the Q-values of slots. In contrast, if a Q-value was
computed for each start slot s, i.e. the reward was ac-
cumulated over the wake duration and stored at slot s
only, changing the duty cycle at run-time will render
the computed Q-values useless, since the reward was
accumulated over a different duration. In addition,
slot s will be updated only when the agent wakes up
at that slot. A separate exploration strategy is there-
fore required to ensure that this action is explored suf-
ficiently. Thirdly, our exploration scheme will contin-
uously explore and update not only the wake-up slot,
but all slots within the awake period. Treating slots
individually results in an implicit exploration scheme
that requires no additional tuning.
Even though agents employ a greedy policy (se-
lecting the action that gives the highest sum of Q-
values), this “smooth” exploration strategy ensures
that all slots are explored and updated regularly at the
start of the application (since values are initiated ran-
domly), until the sum of Q-values of one group of
slots becomes strictly larger than the rest. In that case
we say that the policy has converged and thus explo-
ration has stopped.
The speed of convergence is influenced by the
duty cycle, fixed by the user, and the learning rate,
which we empirically chose to be 0.1. A constant
learning rate is in fact desirable in a non-stationary
environment to ensure that policies will change with
respect to the most recently received rewards (Sutton
and Barto, 1998).
4 RESULTS
We proceed with the experimental comparison be-
tween our (de)synchronization approach and a fully
synchronized one that is typically used in practice,
such as S-MAC (Ye et al., 2004; Liu and Elhanany,
2006).
4.1 Experimental Setup
We applied our approach on three networks of dif-
ferent size and topology. In particular, we investi-
gate two extreme cases where nodes are arranged in
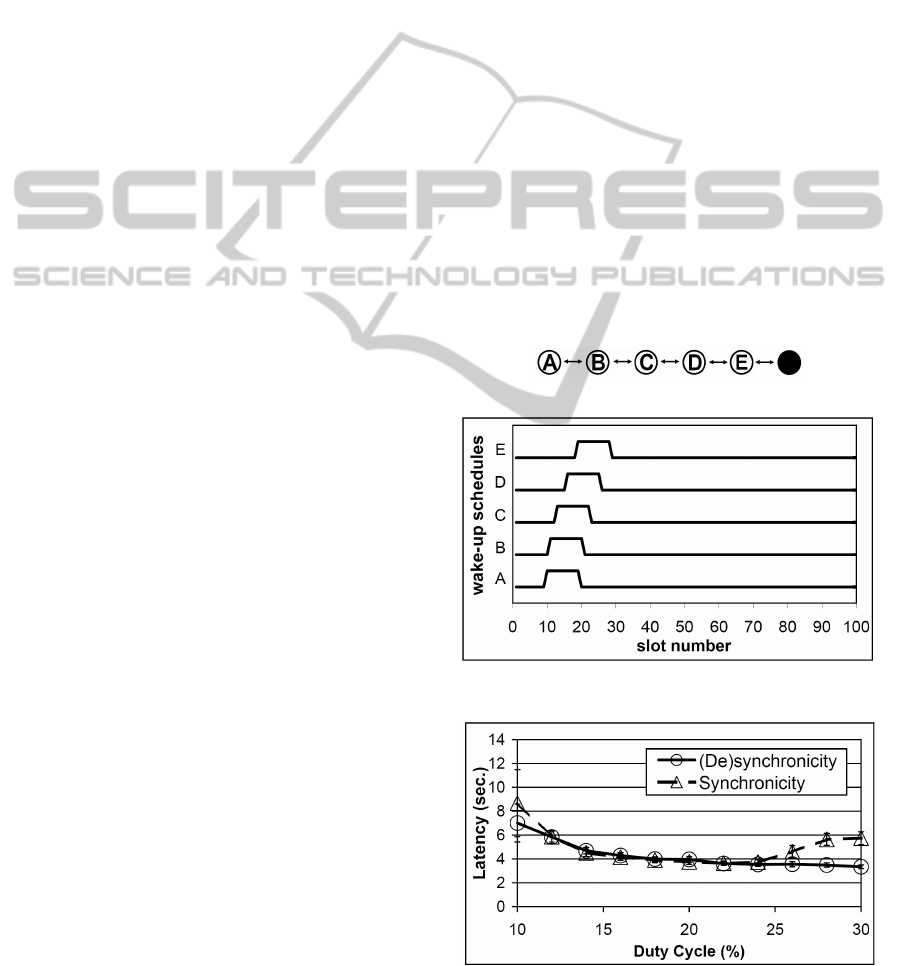
a 5-hop line (Figure 2(a)) and a 6-node single-hop
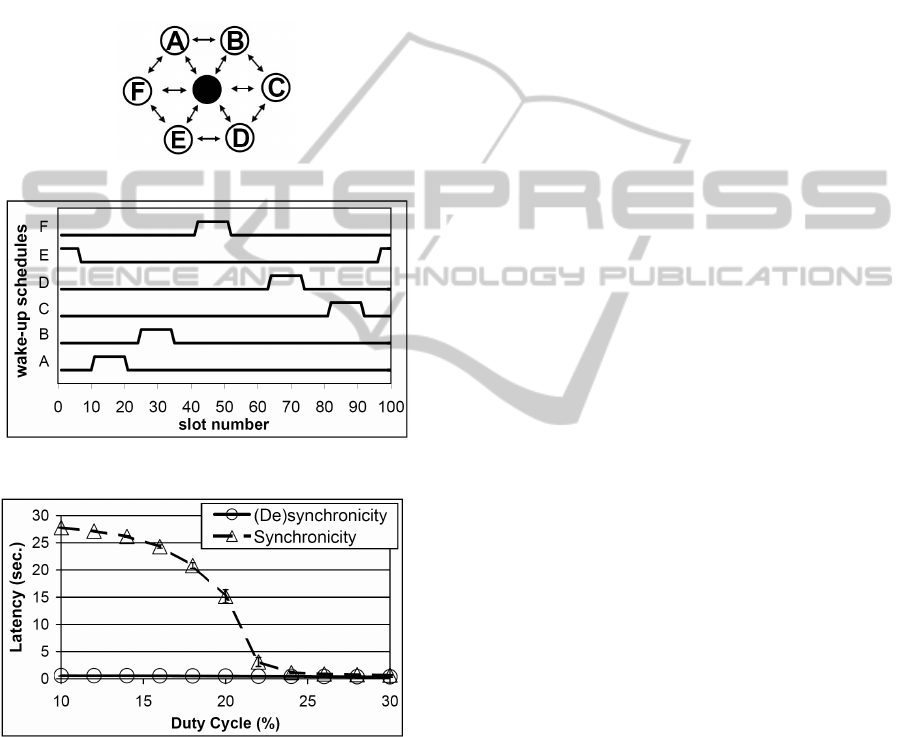
mesh topology (Figure 3(a)). The former one requires
nodes to synchronize in order to successfully forward
messages to the sink. Intuitively, if any one node is
awake while the others are asleep, that node would not
be able to forwarded its messages to the sink. Con-
versely, in the mesh topology it is most beneficial for
nodes to fully desynchronize to avoid communication
interference with neighboring nodes. Moreover, the
sink is able to communicate with only one node at a
time. The third topology is a 4 by 4 grid (Figure 4(a))
where sensing agents need to both synchronize with
some nodes and at the same time desynchronize with
others to maximize throughput and network lifetime.
The latter topology clearly illustrates the importance
of combining synchronicity and desynchronicity, as
neither one of the two behaviors alone achieves the
global system objectives. Subsection 4.2 will con-
firm these claims and will elaborate on the obtained
results.
Table 1: Parameters for experimental topologies.
topology num. num. avg. num. data rate
type nodes hops neighbors (msg/sec)
line 5 5 1.8 0.10
mesh 6 1 3.0 0.33
grid 16 4 3.25 0.05
Each network was ran for 3600 seconds in the
OMNeT++ simulator (http://www.omnetpp.org/ – a
C++ simulation library and framework, ). Results
were averaged over 50 runs with the same topologies,
but with different data sampling times. Table 1 sum-
marizes the differences between the experimental pa-
rameters of the three topologies.
SELF-ORGANIZING SYNCHRONICITY AND DESYNCHRONICITY USING REINFORCEMENT LEARNING
99
Frames were divided in S = 100 slots of 10 mil-
liseconds each, and we modeled five different events,
namely overhearing (r = 0), idle listening (r = 0 for
each idle slot), successful transmission (r = 1 if ACK
received), unsuccessful transmission (r = 0 if no ACK
received) and successful reception (r = 1). Maxi-
mizing the throughput requires both proper transmis-
sion as well as proper reception. Therefore, we treat
the two corresponding rewards equally. Furthermore,
most radio chips require nearly the same energy for
sending, receiving (or overhearing) and (idle) listen-
ing (Langendoen, 2008), making the three rewards
equal. We consider these five events to be the most
energy expensive or latency crucial in wireless com-
munication. Additional events were also modeled,
but they were either statistically insignificant (such as
busy channel) or already covered (such as unsuccess-
ful transmissions instead of collisions).
Due to the exponential smoothing nature of the
reward update function (cf. subsection 3.4) the Q-
values of slots will be shifted towards the latest reward
they receive. We would expect that the “goodness” of
slots will decrease for negative events, and will in-
crease for successful communication. Therefore, the
feedback agents receive is binary, i.e. r
i
s,e
∈ {0, 1},
since it carries the necessary information. Other re-
ward signals were also evaluated, resulting in similar
performance.
To better illustrate the importance and effect of
(de)synchronicity in these topologies, we compare
our approach to networks where all nodes wake up at
the same time. All other components of the compared
networks, such as the routing and CSMA communi-
cation protocols, remain the same. In other words, we
compare our RL technique to networks with no coor-
dination mechanism, but which employ some means
of time synchronization, the small overhead of which
will be neglected for the sake of a clearer exposition.
This synchronized approach ensures high network
throughput and is already used by a number of state-
of-the-art MAC protocols, such as RL-MAC (Liu and
Elhanany, 2006) and S-MAC (Ye et al., 2004). How-
ever, as we will demonstrate in subsection 4.2, syn-
chronization alone will in fact decrease system per-
formance.
4.2 Evaluation
Figure 2(b) displays the resulting schedule of the line
topology (Figure 2(a)) after the action of each agent
converges. The results indicate that nodes have suc-
cessfully learned to stay awake at the same time in
order for messages to be properly forwarded to the
sink. In other words, we observe that all nodes belong
to the same coalition, as suggested in Figure 1. If any
one node in the line topology had remained active dur-
ing the sleep period of others, its messages, together
with those of its higher hop neighbors would not have
been delivered to the sink. Even though neighboring
nodes are awake at the same time (or have synchro-
nized), one can see that schedules are slightly shifted
in time. The reason for this desynchronicity is to re-
duce overhearing of messages from lower hop nodes
and to increase throughput – a behavior that nodes
have learned by themselves. The size of this time
shift depends on the time at which nodes send data
within their awake period. As mentioned in subsec-
tion 2.1, messages are sent at a random slot within a
frame. Therefore, the difference between the wake-up
times is small enough to increase the chance of suc-
cessful transmissions and large enough to ensure fast
throughput, compensating for propagation delays.
In the line topology this time shift is, however,
marginal to the active period and therefore the per-
formance of the learning nodes is comparable to that
of the fully synchronized network. This effect can
be observed in Figure 2(c), which displays the end-
to-end latency of the learning and the synchronized
(a) Line topology
(b) Resulting wake-up schedule after convergence for duty
cycle of 10%
(c) End-to-end latency for different duty cycles
Figure 2: Experimental results for the line topology.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
100
nodes respectively. We can conclude from the graph
that in a line topology, where nodes have no neighbors
on the same hop, the improvements of our learning
algorithm are marginal to that of a synchronized net-
work. As mentioned above, the reason for this com-
parable performance lies in the fact that a successful
message forwarding in the line topology requires syn-
chronicity. Nevertheless, our agents are able to inde-
pendently achieve this behavior without any commu-
nication overhead.
(a) Mesh topology
(b) Resulting wake-up schedule after convergence for
duty cycle of 10%
(c) End-to-end latency for different duty cycles
Figure 3: Experimental results for the mesh topology.
In contrast to the previous topology, our second
set of experiments investigate the performance of the
network where all nodes lie on the same hop from
the sink. This setup presents agents with the opposite
challenge, namely to find an active period where no
other node is awake. The latter behavior will elim-
inate communication interference with neighboring
nodes and will ensure proper reception of messages
at the sink. Figure 3(b) displays the wake-up sched-
ule of the learning nodes for a duty cycle of 10% af-
ter the actions of agents converge. One can observe
that the state of desynchronicity has been success-
fully achieved where each node is active at a different
time within a frame. Put differently, each node has
chosen a different wake-up slot and therefore belongs
to different coalition. The benefit of this desynchro-
nized pattern is clearly evident in Figure 3(c) where
we compare it to the latency of the synchronized sys-
tem. For duty cycles lower than 25% the reduction in
latency is signifficant, as compared to a synchronized
network of the same topology.
Lastly, we investigate a “mix” of the above two
topologies, namely a grid shown in Figure 4(a).
Nodes here need to synchronize with those that lie
on the same branch of the routing tree to ensure high
throughput, while at the same time desynchronize
with neighboring branches to avoid communication
interference. The resulting schedule of the learning
nodes after convergence is displayed in Figure 4(b).
As expected, the four columns of nodes belong to
four different coalitions, where nodes in one coalition
are synchronized with each other (being active nearly
at the same time) and desynchronized with the other
coalitions (sleeping while others are active). This is
the state of (de)synchronicity. Nodes in one coali-
tion exhibit comparable behavior to those in a line
topology, i.e. they have synchronized with each other,
while still slightly shifted in time. At the same time
nodes on one hop have learned to desynchronize their
active times similar to the mesh topology.
The result of applying our learning approach in a
grid topology for various duty cycles can be observed
in Figure 4(c). It displays the average end-to-end la-
tency of the network when using synchronicity and
(de)synchronicity respectively. For duty cycles lower
than 20% the improvements of our learning nodes
over a synchronized network are outstanding. Due
to the high data rate, the synchronized nodes are inca-
pable of delivering all packets within the short awake
period, resulting in increased latency and high packet
loss. The high amount of dropped packets at low duty
cycles is simply intolerable for real-time applications.
This reduced performance at low duty cycles is due
to the large number of collisions and re-transmissions
necessary when all nodes wake up at the same time.
The learning approach on the other hand drives nodes
to coordinate their wake-up cycles and shift them in
time, such that nodes at neighboring coalitions desyn-
chronize their awake periods. In doing so, nodes ef-
fectively avoid collisions and overhearing, leading to
lower end-to-end latency and longer network lifetime.
When nodes coordinate their actions, they effec-
tively reduce communication interference with neigh-
SELF-ORGANIZING SYNCHRONICITY AND DESYNCHRONICITY USING REINFORCEMENT LEARNING
101
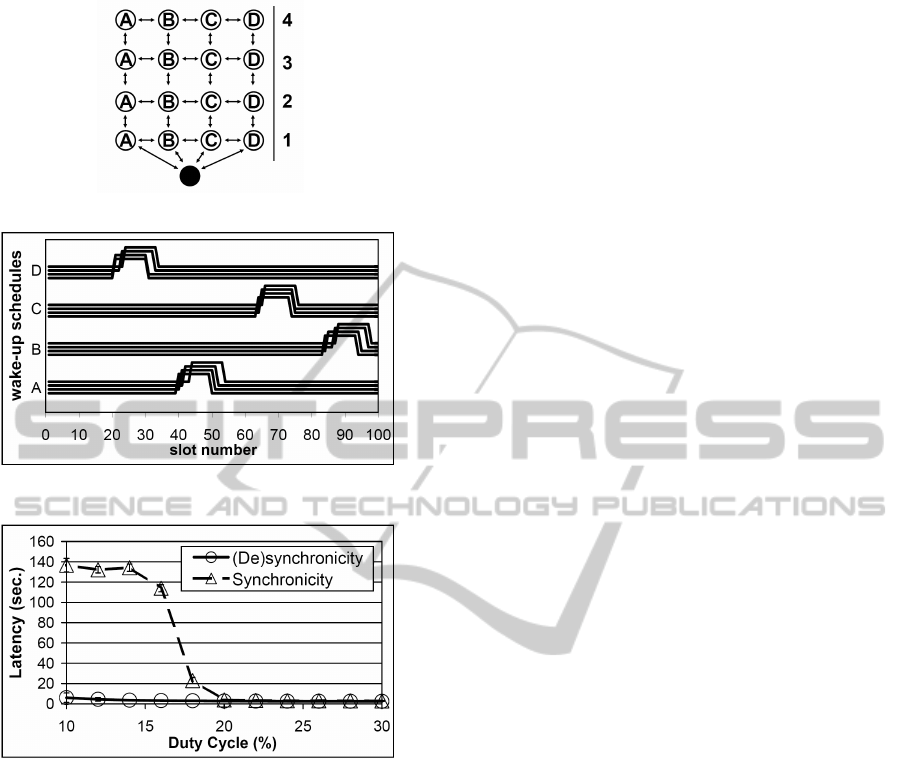
(a) Grid topology
(b) Resulting wake-up schedule after convergence for
duty cycle of 10%
(c) End-to-end latency for different duty cycles
Figure 4: Experimental results for the grid topology.
boring nodes. This behavior results in lower amount
of overheard packets, less collisions and therefore
fewer retries to forward a message, as compared to
the fully synchronized network.
Finally, we would like to mention the convergence
rate of the learning agents. The implicit exploration
scheme, described in subsection 3.5 makes nodes se-
lect different actions in the beginning of the simula-
tion in order to determine their quality. As time pro-
gresses, the Q-values of slots are updated sufficiently
enough to make the policy of the agents converge. We
measured that after 500 iterations on average the ac-
tions of agents do not change and thus the state of
(de)synchronicity has been reached. In other words,
after 500 seconds each node finds the wake-up sched-
ule that improves message throughput and minimizes
communication interference. This duration is suffi-
ciently small compared to the lifetime of the system
for a static WSN, which is in the order of several days
up to a couple of years depending on the duty cycle
and the hardware characteristics (Ilyas and Mahgoub,
2005).
4.3 Discussion
The main feature of the proposed reinforcement
learning approach is that nodes learn to cooperate
by simply observing their own reward signals while
forwarding messages. As a result, it drives agents
to coordinate their wake-up cycles without any
communication overhead. This behavior ensures that
neighboring nodes avoid communication interference
without exchanging additional data. The synchro-
nized approach, on the other hand, lets all nodes be
awake at the same time. Thus, for low duty cycles, the
risks of collisions and therefore re-transmissions are
increased. This was confirmed by our experimental
results, where we observed that (de)synchronicity
can increase the system performance in mesh and
grid topologies for low duty cycles as compared to a
standard, fully synchronized approach.
When duty cycles of (synchronized) agents be-
come larger, nodes have less chance of collisions and
hence re-transmissions, leading to decreased latency
and no packet loss. As mentioned in subsection 2.1,
packets are sent at random slots within the active
period. Thus, the negative effect of being awake
at the same time becomes less pronounced as the
duty cycle increases. Similarly, as the number of
messages per active period decreases, the learning
agents receive less reward signals, leading to slower
convergence and poorer adaptive behavior. In such
cases it is less beneficial to apply our RL approach,
as it performs similar to the fully synchronized
one. Nevertheless, synchronized nodes still overhear
packets of neighbors, resulting in higher battery
consumption as compared to nodes that use our
learning algorithm.
Different axes may finally be considered
to improve the efficiency of the proposed
(de)synchronization policy. First, we only con-
sidered fixed duty-cycles, whereas the traffic in WSN
is often unequal. In particular, nodes closer to the
sink often undergo higher traffic loads due to data
forwarding. A possible approach would be to adopt
a cross-layering strategy where information from
the routing layer, such as the node depth or the
expected traffic load, would be used to adapt the duty
cycle. Second, the RL approach is not well suited for
irregular data traffic, as such type of traffic is likely
to impair the convergence rate of the RL procedure.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
102

A related issue concerns the clock drifts, which may
also cause the learning procedure to fail to converge
to a stable scheduling. We plan to address these
issues in our future work.
5 CONCLUSIONS
In this paper we presented a decentralized rein-
forcement learning (RL) approach for self-organizing
wake-up scheduling in wireless sensor networks
(WSNs). Our approach drives nodes to coordinate
their wake-up cycles based only on local interactions.
In doing so, agents independently learn both to syn-
chronize their active periods with some nodes, so that
message throughput is improved, and at the same time
to desynchronize with others in order to reduce com-
munication interference. We refer to this concept
as (de)synchronicity. We investigated three different
topologies and showed that agents are able to inde-
pendently adapt their duty cycles to the routing tree of
the network. For high data rates this adaptive behav-
ior improves both the throughput and lifetime of the
system, as compared to a fully synchronized approach
where all nodes wake up at the same time. We demon-
strated how initially randomized wake-up schedules
successfully converge to the state of (de)synchronicity
without any form of explicit coordination. As a result,
our approach makes it possible that agent coordina-
tion emerges rather than is agreed upon.
ACKNOWLEDGEMENTS
The authors of this paper would like to thank the
anonymous reviewers for their useful comments and
valuable suggestions. This research is funded by the
agency for Innovation by Science and Technology
(IWT), project IWT60837; and by the Research Foun-
dation - Flanders (FWO), project G.0219.09N.
REFERENCES
Cohen, R. and Kapchits, B. (2009). An optimal wake-
up scheduling algorithm for minimizing energy con-
sumption while limiting maximum delay in a mesh
sensor network. IEEE/ACM Trans. Netw., 17(2):570–
581.
Degesys, J., Rose, I., Patel, A., and Nagpal, R. (2007).
Desync: self-organizing desynchronization and tdma
on wireless sensor networks. In Proceedings of the 6th
IPSN, pages 11–20, New York, NY, USA. ACM.
http://www.omnetpp.org/ – a C++ simulation library and
framework.
Ilyas, M. and Mahgoub, I. (2005). Handbook of sensor net-
works: compact wireless and wired sensing systems.
CRC.
Knoester, D. B. and McKinley, P. K. (2009). Evolving vir-
tual fireflies. In Proceedings of the 10th ECAL, Bu-
dapest, Hungary.
Langendoen, K. (2008). Medium access control in wireless
sensor networks. Medium access control in wireless
networks, 2:535–560.
Leng, J. (2008). Reinforcement learning and convergence
analysis with applications to agent-based systems.
PhD thesis, University of South Australia.
Liang, S., Tang, Y., and Zhu, Q. (2007). Passive wake-up
scheme for wireless sensor networks. In Proceedings
of the 2nd ICICIC, page 507, Washington, DC, USA.
IEEE Computer Society.
Liu, Z. and Elhanany, I. (2006). Rl-mac: a reinforcement
learning based mac protocol for wireless sensor net-
works. Int. J. Sen. Netw., 1(3/4):117–124.
Lucarelli, D. and Wang, I.-J. (2004). Decentralized syn-
chronization protocols with nearest neighbor commu-
nication. In Proceedings of the 2nd SenSys, pages 62–
68, New York, NY, USA. ACM.
Mirollo, R. E. and Strogatz, S. H. (1990). Synchronization
of pulse-coupled biological oscillators. SIAM J. Appl.
Math., 50(6):1645–1662.
Paruchuri, V., Basavaraju, S., Durresi, A., Kannan, R., and
Iyengar, S. S. (2004). Random asynchronous wakeup
protocol for sensor networks. In Proceedings of the
1st BROADNETS, pages 710–717, Washington, DC,
USA. IEEE Computer Society.
Patel, A., Degesys, J., and Nagpal, R. (2007). Desynchro-
nization: The theory of self-organizing algorithms for
round-robin scheduling. In Proceedings of the 1st
SASO, pages 87–96, Washington, DC, USA. IEEE
Computer Society.
Schurgers, C. (2007). Wireless Sensor Networks and Appli-
cations, chapter Wakeup Strategies in Wireless Sensor
Networks, page 26. Springer.
Sutton, R. S. and Barto, A. G. (1998). Reinforcement Learn-
ing: An Introduction. MIT Press.
Watkins, C. (1989). Learning from delayed rewards. PhD
thesis, University of Cambridge, England.
Werner-Allen, G., Tewari, G., Patel, A., Welsh, M., and
Nagpal, R. (2005). Firefly-inspired sensor network
synchronicity with realistic radio effects. In Proceed-
ings of the 3rd SenSys, pages 142–153, New York, NY,
USA. ACM.
Wolpert, D. H. and Tumer, K. (2008). An introduction
to collective intelligence. Technical Report NASA-
ARC-IC-99-63, NASA Ames Research Center.
Ye, W., Heidemann, J., and Estrin, D. (2004). Medium
access control with coordinated adaptive sleeping for
wireless sensor networks. IEEE/ACM Trans. Netw.,
12(3):493–506.
Zheng, R., Hou, J. C., and Sha, L. (2003). Asynchronous
wakeup for ad hoc networks. In Proceedings of the 4th
MobiHoc, pages 35–45, New York, NY, USA. ACM.
SELF-ORGANIZING SYNCHRONICITY AND DESYNCHRONICITY USING REINFORCEMENT LEARNING
103
