
MENTAL HEALTH DECLINE PREDICTION
A Smart Sensor for Day to Day Activity Recognition
Thomas Kaegi-Trachsel, Juerg Gutknecht
Native Systems Group, Computer Systems Department, ETH Zurich, Switzerland
Dennis Majoe
MA Systems and Control Limited, Southampton, U.K.
Keywords: Mental health, Depression, Activity sensing, Wearable Smart sensor.
Abstract: The ambulatory activity of a person may be used as one component within an overall wearable sensor
system that predicts the onset of mental health problems. Ergonomic smart sensors that can determine the
total energy expenditure and type of ambulation may provide unique insights to the coping behaviour of
stressed people. Rather than relying on wearable computers, a single smart miniature sensor that is worn
24/7 should perform the complex embedded recognition tasks while meeting difficult battery life, wireless
communications and ergonomic constraints. The development and testing of such a smart sensor is
described which takes into account action timeline variations, as well as action variations both intra
individual and inter individual.
1 INTRODUCTION
This work relates to an activity recognition sensor
developed within the EU research project OPTIMI.
The project’s aim is to provide on-line predictive
tools for the early identification and intervention
during the onset of a mental illness, in particular
depression, following the inadequate coping with
day to day stress.
Second only to depressed mood itself, tiredness,
low energy and listlessness are the most common
symptoms associated with depression (S. M. Stahl,
2002). Energy loss in depression is the factor that
correlates most strongly with lost productivity and
lack of social functioning.
The Psychological Counselling Centre, which
acts as the primary support for students at the ETH
Zurich and University of Zurich, recognize that
students who are significantly traumatized by
examination stress and border on mild depression
will disengage from social activities, sports and any
events requiring physical involvement. Group
activities are avoided, and the student will prefer to
stay at home and do nothing.
The exact relationship between activity and
depression is not clear. In a study on 956 Japanese
men diagnosed with metabolic syndrome (T.
Takeuchi, 2009 ) it was shown that the deposition of
fat around the waist line, was a predictor for the
onset of depression. By studying the behaviour of
the control group the conclusion was that a healthy
lifestyle that involves regular exercise alleviates
depression while conversely a sedentary lifestyle
may increase the visceral fat of individuals with
metabolic syndrome, thereby increasing the risk of
depression. In other related work (A. Berlin, 2006) it
was shown that an enforced reduction in daily
exercise resulted in symptoms of depression.
It is very difficult to find conclusive research that
depression causes a loss of energy and activity.
However what seems to be widely agreed is that
activity and sport has a positive effect in reducing
depression and a reduction in exercise is associated
with the onset and ongoing depression. The quantity
and type of exercise that one performs per week that
might predict the onset of depression has not been
studied to our knowledge and should be determined
as one outcome in the OPTIMI project.
In the field of physical activity research, see the
Compendium of Physical Activity (B. Ainsworth,
2000), there exists an alternative to measuring
energy in Calories or Joules. For example one MET
219
Kaegi-Trachsel T., Gutknecht J. and Majoe D..
MENTAL HEALTH DECLINE PREDICTION - A Smart Sensor for Day to Day Activity Recognition.
DOI: 10.5220/0003150002190227
In Proceedings of the International Conference on Health Informatics (HEALTHINF-2011), pages 219-227
ISBN: 978-989-8425-34-8
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
(for 1 unit of metabolic rate) corresponds to the
typical energy consumption when at rest. Running at
17Km/h has been found on average to correspond to
around 10.0 METs.
Having studied the Compendium, the activities
that are most likely to reduce as the onset of
depression occurs are mainly ambulatory activities
such as Bicycling, Sports, Dancing, Walking,
Running, Stairs and Hill climbing. The table below
shows some of the MET values for each activity.
Table 1: METs for different activities.
Code METs Activity Description
01015 8.0 Bicycling
03031 4.5 Dance: Disco, Folk, Country
15711 8.0 Sport: e.g. Volleyball, Gym
17151 2.0 Walking, less than 2.0 mph,
17231 8.0 Walking, 5.0 mph
15734 10.0 Running, sprint, athletics
Rather than compute actual energy expenditure
in calories, it is convenient to try and count the MET
minutes product used by a person per day. Once one
can identify what ambulatory activity is being
performed then the total time spent during each
activity provides a simple way to measure and
compare people’s daily behavior.
In other related research it has been shown that
there is a relationship between a person’s gait or
walking style, and their depressive symptoms (J.
Michalak, 2009). However the primary impact of
depression is on the upper body posture and the
speed of walking, not on the leg posture or the action
cycle of the legs. Therefore we do not expect
depression to affect ambulation patterns.
In summary, as part of a multiple sensor solution,
an activity sensor that can recognize the different
ambulatory activities is being developed and this
paper reports on the success to date.
Section 2 describes the OPTIMI architecture
within which the activity sensor operates. Section 3
describes the sensor hardware while section 4
explains the recognition approach and section 5
discusses the results obtained during preliminary
trials.
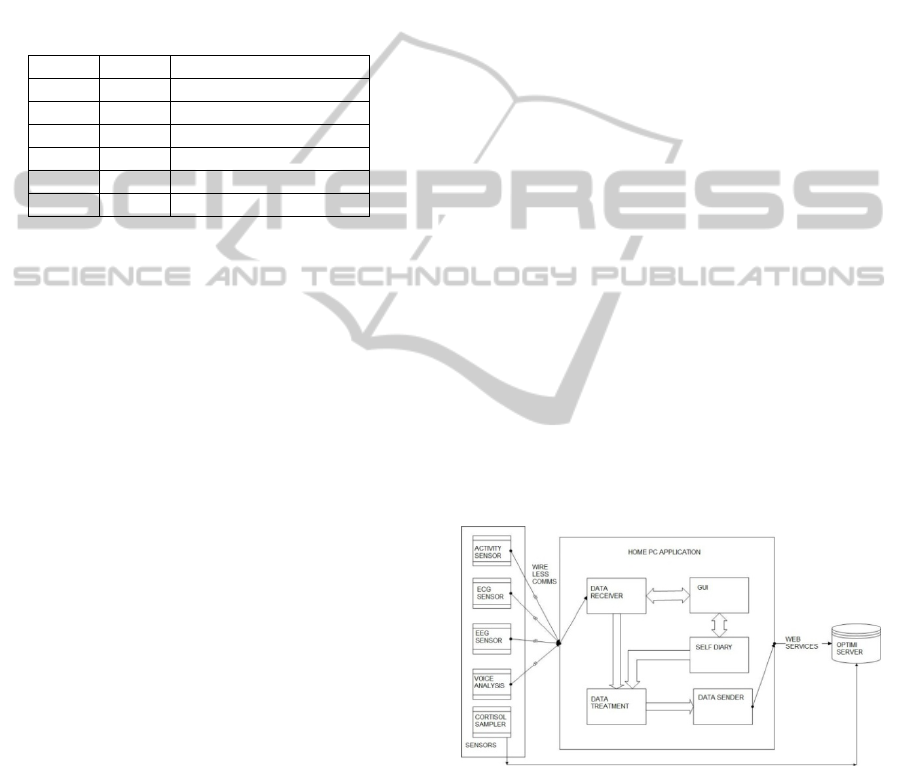
2 SENSOR ARCHITECTURE
The OPTIMI project incorporates a number of smart
wearable sensors. The following summarizes the
sensors and their target function:
• The Activity Sensor (ACT) for ambulatory
activity recognition, described in this paper
• ECG for heart rate derived stress indicators
• EEG to derive affective status (sensitivity)
• Sleep Quality, restlessness and insomnia
• Sub Dermal Cortisol
• Speech Analysis to estimate depression
In many wearable sensor applications, data from
the sensor is streamed to a signal processing
computer such as a wearable PDA. This approach
can result in a 90% wastage of the available sensor
battery energy in wireless communications and
sensors that are worn 24/7 would require frequent
recharging.
Instead significant energy conservation can be
achieved by making the sensor itself do the signal
processing using highly optimized signal processing
in which the large amounts of real time information
are processed and converted to time stamped results
comprising only a few hundred bytes per day. When
this data is communicated wirelessly not only is
their little energy spent on communications but in
addition raw data privacy and data security are
enhanced.
Therefore the policy in OPTIMI has been to
process data at source as far as possible and to
derive a much smaller encrypted set of time stamped
data reflecting the state of the user. As a result the
activity and ECG sensors process data locally all day
long and store the results locally. At one time during
the day, the user is invited to update their daily diary
hosted on a Home PC as well as use the speech and
EEG sensors. While these tasks are being carried out
the ECG and ACT data is wirelessly downloaded.
Figure 1: The OPTIMI sensor and Home PC Architecture.
3 SENSOR HARDWARE
The ACT hardware is based on the nRF24LE1 from
Nordic. This micro-controller was chosen despite its
limited processing capability, based on its very low
cost, very small footprint, suitable ADC and flash
HEALTHINF 2011 - International Conference on Health Informatics
220

EEPROM resources and the integration of a 2.4Ghz
RF transceiver.
The nRF24LE1 is combined with an Analog
Devices ADXL325 three axis accelerometer for the
purpose of measuring accelerations of the user’s
lower leg; the sensor being placed just above the
ankle.
The microcontroller samples the three axes at a
rate of 50 or 100Hz and performs activity
recognition processing on this data. Following each
sample and activity identification the sensor logs the
result in the EEPROM, time stamps it and continues
to the next activity recognition.
Due to the fact that the RF end of the
microcontroller consumes a large proportion of the
power, the RF stage is seldom switched on during
normal operation. However every 5 seconds, the RF
stage is switched on for 20 milliseconds and the
device listens for a command packet from the users
Home PC. In the event one is received the sensor
begins an authentication handshake and subsequent
interchange of relevant data.
As the device is to be worn continuously three
very important design constraints have been
demanded:
• The battery life must be as long as possible
• The device must be small and hermetically
sealed to survive swimming and bathing
• The device must therefore be non contact
charged
The device is powered by a 20mAh lithium
polymer battery with the intention being to last
ideally 72 hours between charge times. Besides
reducing any unnecessary usage of the RF stage, as
previously mentioned, the design includes several
energy saving methods.
For example the ADXL325 device has been
chosen for its wider G range and very low cost
however it is slightly more power hungry than other
devices available and is the main power-sink after
the microcontroller. To reduce power applied in
sensing the accelerometer and the microcontroller
ADC are only switched on before and switched off
immediately after the 3 axes are sampled. Allowing
for switch on times delay, this saves about 50% of
the power compared to leaving them on at all times
i.e. saving roughly 0.15mA on average.
Similarly, it is planned that the activity
recognition task should itself be managed depending
on time and observed activity. That is, by using the
local timer and sleep function, the sensor will set to
conduct activity recognition between around 10%
and up to 70% of the time, depending on the
observed activity seen by the accelerometer.
This is achieved by implementing a small
dedicated code to check the accelerometer outputs
and to decide if there is some activity or not. If there
is no activity, then the device goes to sleep for 100
milliseconds before repeating the activity check. As
soon as activity is detected the main recognition task
is engaged and repeated up to a maximum of 70% of
the time, the rest of the time the sensor is set to sleep
mode.
In this way if the user is continuously active,
such as engaged in a long walk, the energy
maximum usage is 70% of worst case. Meanwhile if
the user is sleeping, then the sensor is largely
inactive apart from if the user moves from time to
time.
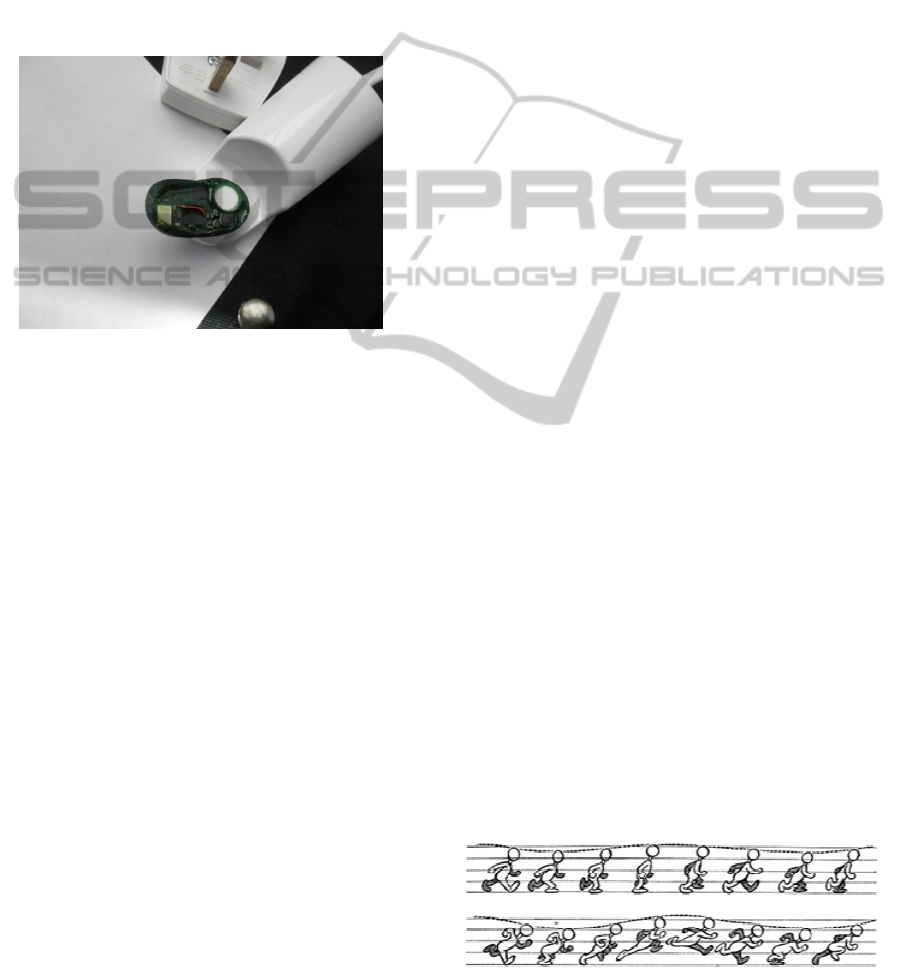
3.1 Ergonomics Constraints
The small size of the sensor, Figure 2.0, has been
achieved using an electronic PCB design equal in
size to the dimensions of the LiPo battery used. The
assembled device has a very low profile with no on-
off switch or flash connectors.
Figure 2: The ACT sensor, 20mm x 12 mm x 3mm, the
flash connector on the right is snapped off pre
encapsulation.
The hermetic sealing requirement implies that
the sensor must have a contactless charging method
and that the sensor is totally encapsulated.
To achieve this, the ACT sensor incorporates a
LiPo battery charging circuit as well as the
rectification stage for an inductive voltage power
input. The microcontroller, powered by the battery,
is able to sense when the rectified inductive input
voltage rises above the input threshold required by
the charging circuit. When this occurs the
microcontroller goes into a deep sleep effectively
switching itself off and appearing as a tiny load
shunt across the battery. This allows the charging
circuit to charge the LiPo battery without any
interference, until the battery voltage has reached the
fully charged level.
Meanwhile the inductive loop coil which is
driven at 10KHz by a standard off the shelf
MENTAL HEALTH DECLINE PREDICTION - A Smart Sensor for Day to Day Activity Recognition
221
inductive power supply, is integrated into the
strapping system used to attach the sensor to the
users lower leg.
Figure 3.0 shows a device under inductive
charge. The electronics is sealed within a two part
epoxy resin (ALH Systems Ltd., U.K.) that has been
chosen to provide maximum water resistance,
maintain hardness to over 80 degrees C., and above
all to be extremely toxic and irritant free when worn
against the skin. Further the color and molding of
the resin is chosen to create a device that could be
worn as a fashionable accessory.
Figure 3: The ACT sensor in encapsulation and on
inductive charge.
4 RECOGNITION APPROACH
Activity recognition for health purposes has become
a much researched topic. The measurement of
activity has major implications for diseases such as
obesity and is important for monitoring and assisting
the elderly and disabled. Several research works
have attempted to detect user activity using motion
sensing [6, 7, 8].
Having reviewed the state of the art, two major
design issues were considered important in this
work. Firstly, how to cope with variations in the
time taken to complete an activity and secondly
whether a sensor should be trained for its own user
or if a generic user independent method could be
created.
The recognition approach itself requires a feature
extraction followed by a machine learning of the
classification parameters and essentially two
methods exist namely discriminative and generative.
In many of the discriminative approaches, time is an
important dimension. For example most high end
pedometers and more ambitious work (U. Maurer,
2006) use time domain statistics exclusively to
extract the features. Similarly frequency domain
power spectral density may also be used, (M. Lee,
2009). In these cases how fast or slow the action is
performed factors into the type of activity
classification. This can result in different
interpretations of whether a walk activity is a fast
walk a slow walk or a slow run.
In the generative approach, the feature extraction
must generate a sequence of observations and these
could be treated as time invariant; just a list of
codes. If one can achieve total time independence
then how fast or how slow the person performs the
activity does not factor into the recognition problem.
In order to provide a generic classifier that can
recognize anyone’s activity based on a general
training, it was felt that a probabilistic approach
should be used that would include a wide range of
user variations.
Combining these two considerations, what was
decided was that a probabilistic generative approach
that excluded time during the feature extraction
process was necessary. Both feature extraction and
learning classifier should combine to detect the
activity at a general level rather than to detect the
specific users activity cycle. In this way the user
simply applies the sensor to their leg on a plug and
play basis and does not need to engage into a
specific one to one training procedure.
In a similar approach to (J. Suutala, 2007) we
have used a simpler k-means approach, rather than
SVM approach, to derive a time independent
observation feature space followed by a Hidden
Markov Model approach for the observation
sequence processing and classification.
4.1 Feature Extraction
As discussed above, the time dimension is
preferably excluded from our analysis. By doing so
we attempt to detect walking, irrespective of
whether the walk cycle is a slow walk, a medium
walk or a brisk walk cycle.
When one studies the ambulatory cycles of
walking, running, climbing and so on it becomes
clear that while there are several similarities, there
are also differences. Specifically the sequence of
rotations and jerks of the leg are different
Figure 4: The walk cycle versus the run cycle showing leg
rotation difference particularly during the flight phase.
HEALTHINF 2011 - International Conference on Health Informatics
222
irrespective, to a large degree of the time over which
they occur.
The legs rotational posture can be sensed by the
3 axis accelerometer which detects leg inclination
relative to the gravitational field. The leg jerk
accelerations are then superimposed on the gravity
signal.
Except for the case of dance and sports, where
the leg often moves in the Z direction, from left to
right, for walking and other ambulation, the main
accelerations occur in the sagittal XY plane.
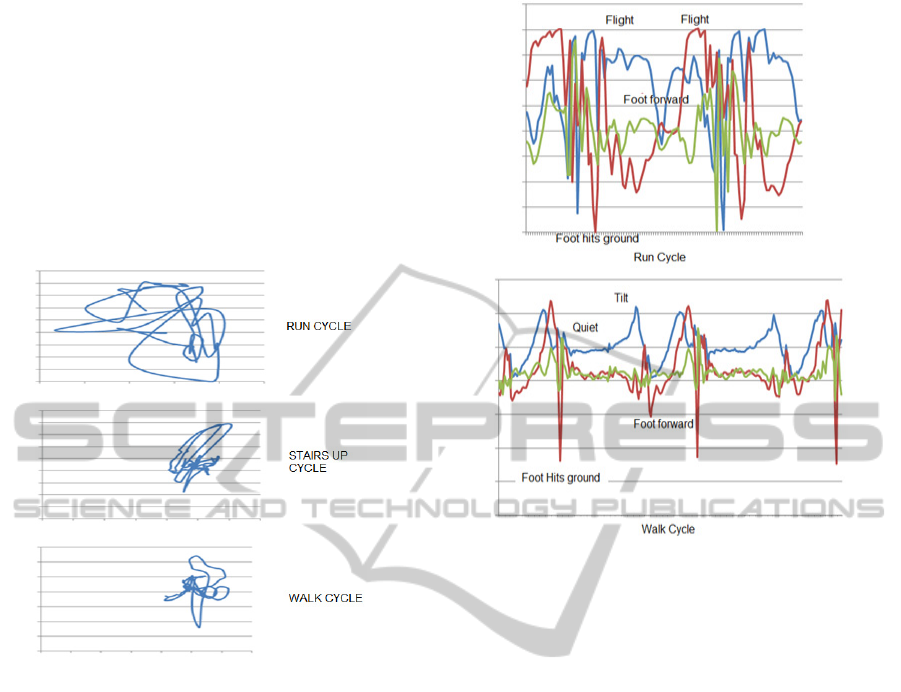
Figure 5: X vs Y plots of the accelerometer axes for
running, stairs and walking.
In Figure 5.0 above the X and Y axis readings
are shown for walk, run and climbing stairs. The
readings are shown as a line plot of X against Y.
One can see that the readings map out three totally
different looking plots and these plots tend to be
largely time invariant, looking roughly the same
irrespective of the time taken to do the motion.
Therefore these X vs Y plots are the base for the
time invariant approach where the objective is to
define key points in the plot that can be used as
features.
If one looks at the related time plots for this data,
see Figure 6.0 below, one can see that in the time
domain, it is possible to quickly identify by eye the
specific parts of the action cycle corresponding to a
feature of the activity. An example in the run cycle
is the point of “flight” where we can predict both of
the user’s legs are off the ground, or in the stair
climb, where the leg is lifted to the next stair as
opposed to pushed forward in the case of the walk
cycle.
Figure 6: Annotation of the run and walk cycle indicating
primary sequence points.
Instead of using time references to mark these
points of interest we alternatively use X, Y
coordinates in the 2D XY space. These reference
points allow us to quantize the raw data and assign it
a code thereby defining an observation. Each
observation code becomes an input to the final
HMM classifier that will recognize the activity.
To automatically create the points for a specific
activity we apply a k-means algorithm to the XY
data generated during that activity cycle. This results
in a much smaller number of points that represent
the overall plot by a set of region points or zones of
interest. Such a technique was successfully used in
previous work conducted by the authors in a Tai Chi
activity recognition where points were mapped in a
3D space, (D. Majoe, 2009).
These zones are calculated as the centroids of the
standard k-means algorithm, which was modified to
accentuate the weighting associated with each data
point. Since the most interesting data points in the
activity cycle are those where the leg is moving, so
the weighting of a data point was calculated as a
function of the square of its velocity. In addition, to
de-accentuate the high number of XY values that
occur when the leg is stationary and vertical, a
“quiet” point, the weighting is increased as a
MENTAL HEALTH DECLINE PREDICTION - A Smart Sensor for Day to Day Activity Recognition
223
function of the square of the distance away from the
“quiet” point.
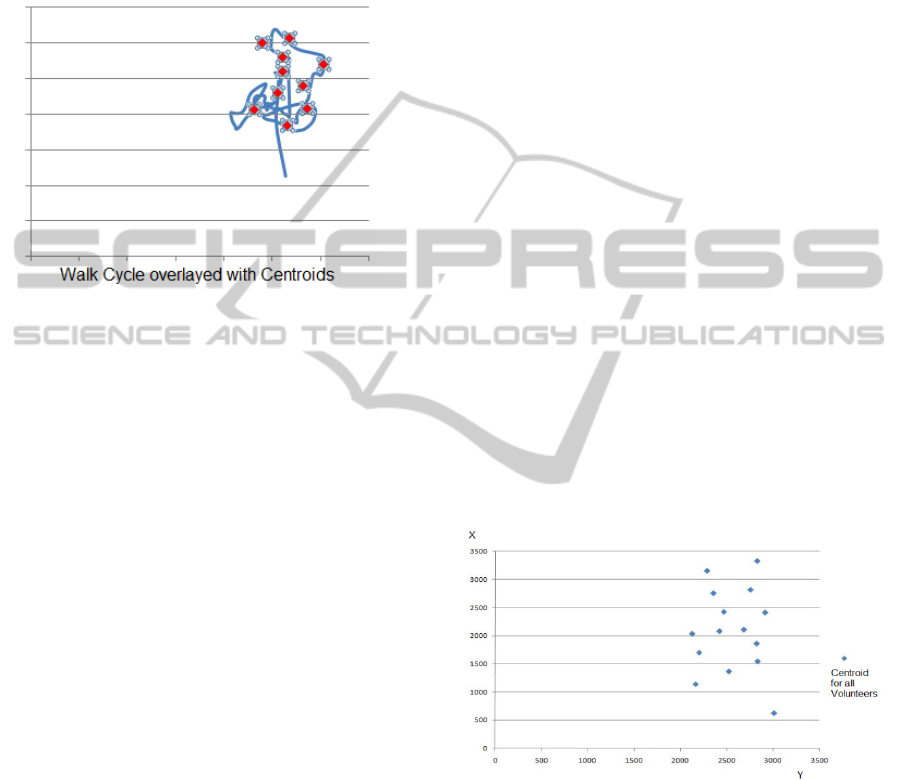
As a final measure, one or two of the centroids
calculated can be slightly moved by hand to further
accentuate a specific zone of interest. The centroid
distribution for an example walk cycle is shown in
Figure 7.0 .
Figure 7: K-means Centroids for the walk cycle.
Having calculated the M centroids, in XY space,
the sequence of observations for the HMM is
calculated as that sequence of centroids closest to
the flight path of the activity signal as it moves over
the XY space. In this work the number of centroids
M was finally set at 15, giving 15 possible
observation values.
4.2 HMM Recognition
The HMM recognition method has been well
described and documented (L. R. Rabiner, 1989).
The method allows the modeling of a state change
process which associates to each state an emission
probability for a given sequence observation
occurring. Therefore the XY space derived activity
observations, coming from the feature extraction,
may be associated with a probability of occurring at
a specific stage of the state change process. If an
observation does or does not occur at a point in the
sequence finally corresponds to a higher or lower
probability being estimated.
Since one has no clear idea of what the hidden
state model should be in the case of the various
ambulation activities, one relies on the Baum Welch
learning algorithm to define the state model and no
restriction is placed on the state transition matrix.
Through our experience with work on activity
recognition, the optimal number of states used is 5
and the observation set is kept to 15. For each
activity to be recognized we use a sliding window of
variable length, between 10 and 20 sequence
observation changes.
In order to train the classifiers for a particular
activity, for example for walking, the following
process is performed:
• Collect 9 walk cycles for volunteer 1
• Generate k-means zones for all data
• Adjust key centroids by hand
• Generate Observation Sequences
• Input Sequences to Baum Welch algorithm
• Save Output matrices
The output matrices reflect all that is needed for
running a classifier for this activity. To make a
classification, the forward probability algorithm is
applied using these matrices on the test observation
sequence data. The forward algorithm generates a
number closer to 1.0 the better the correspondence
of the test sequence to the training set. In order to
create a suite of activity classifiers the above is
repeated for all activities and a bag of classifiers is
used with maximum probability voting logic to
determine which activity has been performed.
To judge inter individual recognition, data from
multiple volunteers is merged to create a general
activity feature extraction centroid reference base.
Since there are differences in the way people walk
and run it was hypothesized that the recognition
rates would be significantly lower than for the
individual trained approach.
Figure 8: Generalized Centroids formed from all the walk
cycles of all Volunteers.
Recognition rates will be acceptable provided
the inter individual and intra-individual activity
patterns are similar and that the feature extraction
and HMM classifiers can make use of these
similarities. The centroid pattern generated by the k-
means algorithm should be similar whether it is for
one person or for multiple people’s activity cycle
data. That is, zones of interest will have a similar
visual pattern for both inter and intra individual
activity cycles.
HEALTHINF 2011 - International Conference on Health Informatics
224
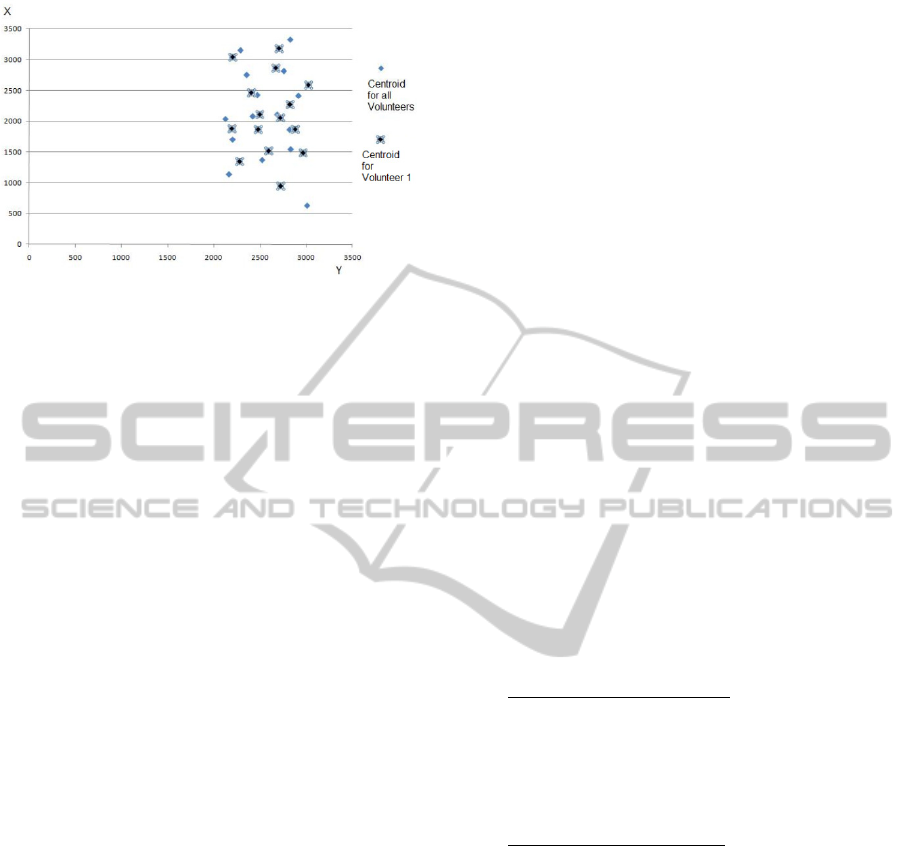
Figure 9: Overlay of Volunteer 1 on the Generalized
Centroids of all 12 Volunteers.
The above plots clearly show that the feature
space generated by using data from all volunteers,
Figure 8.0, closely resembles, when overlaid with
data from a single volunteer, Figure 9.0. The two
sets of centroids demark a similar visual pattern and
this allows us to conclude that the walk cycle
activity is generally speaking the same for all
volunteers. The same was found to be true for other
ambulatory activities.
5 RESULTS
In order to obtain test data a trial, which received
full ethical approval from the Ethics Commission of
ETH Zurich, was conducted in Zurich. Twelve
volunteers were fitted with the sensors and a wide
range of activities were recorded:- Walking,
Running, Jogging, Cycling, Stairs Up, Stairs Down,
Walking up Hill, Walking Downhill, at rest and
playing catch ball.
The primary aim of this trial was to check the
sensor hardware and verify the base algorithms. So
far we have determined initial recognition accuracies
for walking, running and stairs up for inter and intra
individual recognition.
5.1 Sensor Hardware
The sensors were used in two ways. At first they
were used simply as data recorders, sampling the
activity cycles as the volunteers walked around the
Zurich city centre and then downloading the data
wirelessly to a Net-Book afterwards. In order to
perform most of the algorithm development, the
recognition analysis was then done offline on
desktop PCs.
Following the training of the classifiers and once
the emission, state and transition matrices had been
obtained for each specific activity, the HMM
Classifier based on the forward algorithm was run
on the ACT sensor embedded as an application. This
was done to assess the computational load in a real
time situation.
The feature extraction and recognition on the
ACT device is performed as follows:
• Sample Motion Data for 5 seconds at 100 Hz.
• Generate Sequences for each activity
• Isolate the first occurring “quiet time”
observation
• Apply forward Algorithm from this point
• Majority vote for highest output classifier
• Store results and loop back to sampling
The HMM computation performed on the sensor
is restricted to the forward algorithm for each of the
activity classifiers of interest. Acting as a dedicated
activity recognition device, the ACT is very easily
reprogrammed with a new activity recognition task
by simply uploading different HMM matrices as
data files over the wireless interface.
The low power nRF24LE1 running at 16Mhz has
two main challenges, to perform the feature
extraction front end and generate the sequences as
quickly as possible and then to calculate the forward
probability as fast as possible for each activity.
The processing times measured on the sensor, for
different conditions are as follows:
FEATURE EXTRACTION
Configuration: 15 centroids
Number of samples: 100
Execution time: 459 ms
Number of samples: 50
Execution time: 230 ms
HMM CLASSIFICATION
Configuration: 5 HMM states
Observation types: 15
Sequence length: 20
Execution time: 29 ms
Sequence length: 10
Execution time: 13 ms
These results help us to decide how to structure
the overall quasi real time recognition algorithm.
Given these values, it should be possible to sample
data for 2 seconds at 50 Hz (encompassing all types
of cycle) and follow this with 0.5 seconds of
processing for the feature extraction followed by 10
classification activity types (walk, run, cycle etc.)
taking up another 300ms. So at maximum we
sample for 2 seconds and process off line for 1
second and this confirms that the use of the
MENTAL HEALTH DECLINE PREDICTION - A Smart Sensor for Day to Day Activity Recognition
225

nRF24LE1 is acceptably powerful for this
recognition processing task.
Figure 10: Trial volunteer walking on a road and sensor
located against right lower leg.
5.2 Early Recognition Results
So far the feature extraction and HMM classification
have been tested with data from the 12 volunteers.
This is probably insufficient data for a robust and
full training of the classifications, however what was
required was a proof of concept feedback at this
early stage of the work. In particular we wanted to
know if one can apply a generalized recognition
approach where individuals do not need to train their
own sensors.
Table 2: Confusion Matrix showing the percentage of
detections for a given activity (row) for each classifier
(column).
Bike Run Stairs Walk
Bike 45 0 44 10
Run 0 90 10 0
Stairs 1 6 90 3
Walk 0 0 22 78
The activity data from all volunteers was split
into one third training set and two third testing set.
The trained classifiers were run with the data from
all test cycles. Voting between classifiers was then
performed to select the highest probability output
classifier.
The above results are very encouraging as a
notional target of 80% was initially considered an
acceptable accuracy in assigning MET energy values
to different activities. On investigation the poor
result, 45%, for the Bicycle activity was caused by
vibration noise that had not been filtered out. The
misclassification of the Stairs classifier has been
tentatively explained by the limited training data
though more work is needed to fully explain it.
6 FURTHER WORK
The approach has been evaluated on 12 volunteers.
It is planned to increase the size of the trials to 50
volunteers and to obtain the activity data for
different people (size, age, shoes and clothing), in
different settings and over longer periods. Given this
data the algorithms will be further improved and
tuned.
In order to improve the sensor’s ergonomics,
user acceptance and usage compliance, a usability
study has been started in which various alternative
shapes and strapping methods should lead to higher
24/7 wearability.
In order to map the relationship between
depression and activity, calibration trials with 300
users in three countries are planned to begin in 2011.
Coping strategy trials will begin in 2012.
7 CONCLUSIONS
A smart sensor that performs the task of activity
recognition on a daily basis has been presented. The
hardware design achieves several of the goals of
accuracy, wireless data transmission,
miniaturization, low cost, hermetic packaging with
inductive charging and long battery life through
attention to power management.
The level of activity recognition achieved thus
far is promising. In particular it has been shown that
the sensor at this stage can already offer a high level
of activity recognition accuracy. Most importantly it
has been shown that ambulatory activities can be
generalized and that individual sensor training will
not be necessary.
ACKNOWLEDGEMENTS
Acknowledgements go to the support students at
ETH Zurich and the co-funding received under the
EU IST Framework 7 program for the project
OPTIMI www.optimiproject.eu.
HEALTHINF 2011 - International Conference on Health Informatics
226

REFERENCES
S. M. Stahl, “The Psychopharmacology of Energy and
Fatigue”, Journal of Clinical Psychiatry, Physicians
Postgraduate Press, January 2002, pages 6-31.
T. Takeuchi, M. Nakao, et al, “Association of the
metabolic syndrome with depression and anxiety in
Japanese men: A 1-year cohort study”, Journal of
Diabetes Metabolic Research, Rev. 2009 Nov, Vol
25(8), pages 762-7.
A. Berlin, W. Kop and P. Deuster, “Depressive Mood
Symptoms and Fatigue After Exercise Withdrawal:
The Potential Role of Decreased Fitness”, Journal of
Psychosomatic Medicine, 2006, Vol 68, pages 224-
230.
B. Ainsworth, M. Haskell et al, “Compendium of physical
activities: an update of activity codes and MET
intensities”, Journal of Medical Science Sports
Exercise, 2000, Vol 32, No.9, Suppl., pages. S498-
S516.
J. Michalak, N. Troje et al, “Embodiment of Sadness and
Depression—Gait Patterns Associated With Dysphoric
Mood”, Journal of Psychosomatic Medicine, 2009, Vol
71, pages 580-587.
U. Maurer, A. Smailagic, D. Siewiorek and M. Deisher,
“Activity Recognition and Monitoring Using Multiple
Sensors on Different Body Positions”, Proceedings of
the International Workshop on Wearable and
Implantable Body Sensor Networks, 2006, pages 113 -
116.
M. Lee, J. Kim, K. Kim, I. Lee, S. H. Jee, S. K. Yoo,
“Physical Activity Recognition Using a Single Tri-
Axis Accelerometer”, Proceedings of the World
Congress on Engineering and Computer Science,
2009, Vol 1. WCECS.
J. Suutala, S. Pirttikangas, J. Roning, H. Ichikawa et al,
“Discriminative Temporal Smoothing for Activity
Recognition from Wearable Sensors”, UCS 2007,
LNCS 4836, pages. 182–195.
D. Majoe, L. Widmer and J. Gutknecht, “Enhanced
Motion Interaction for Multimedia Applications”,
Proceedings of the 7th International Conference on
Advances in Mobile Computing & Multimedia, 2009,
Kuala Lumpur, Malaysia.
L. R. Rabiner, “A tutorial on HMM and selected
applications in speech recognition”, In Proc. IEEE,
Vol. 77, No. 2, pp. 257-286, Feb. 1989.
MENTAL HEALTH DECLINE PREDICTION - A Smart Sensor for Day to Day Activity Recognition
227
