
MULTIOBJECTIVE OPTIMIZATION OF THE 3D TOPOLOGICAL
ACTIVE VOLUME SEGMENTATION MODEL
Jorge Novo, Manuel G. Penedo and Jos
´
e Santos
Computer Science Department, University of A Coru
˜
na, Campus de Elvi
˜
na s/n 15071, A Coru
˜
na, Spain
Keywords:
Deformable segmentation models, Genetic algorithms, Evolutionary multiobjective optimization.
Abstract:
In this work it is proposed an evolutionary multiobjective methodology for the optimization of topological
active volumes. This is a 3D deformable model that integrates features of region-based and boundary-based
segmentation techniques. The model deformation is controlled by energy functions that must be minimized.
Most optimization algorithms need an experimental tuning of the energy parameters of the model in order to
obtain the best adjusted segmentation.
To avoid the step of the parameter tuning, we developed an evolutionary multiobjective optimization that
considers the optimization of several objectives in parallel. The proposed methodology is based on the SPEA2
algorithm, adapted to our application, to obtain the Pareto optimal individuals. The proposed method was
tested on several representative images from different domains yielding highly accurate results.
1 INTRODUCTION
The active nets model (Tsumiyama and Yamamoto,
1989) was proposed as a variant of the deformable
models (Kass et al., 1988) that integrates features
of region–based and boundary–based segmentation
techniques. To this end, active nets distinguish two
kinds of nodes: internal nodes, related to the region–
based information, and external nodes, related to the
boundary–based information. The former model the
inner topology of the objects whereas the latter fit the
edges of the objects.
The Topological Active Net model and its exten-
sion to 3D, that is, the Topological Active Volume
(TAV) model (Barreira and Penedo, 2005), were de-
veloped as an extension of the original active net
model. It solves some intrinsic problems to the de-
formable models such as the initialization problem.
The model deformation is controlled by energy func-
tions in such a way that the mesh energy has a mini-
mum when the model is over the objects of the scene.
The TAV model is an active model focused on seg-
mentation tasks that makes use of a volumetric dis-
tribution of the nodes. It integrates information of
edges and regions in the adjustment process and al-
lows to obtain topological information inside the ob-
jects found. This way, the model, not only detects
surfaces as any other active contour model, but also
segments the inside of the objects. The model has a
dynamic behavior by means of topological changes
in its structure, that enables accurate adjustments and
the detection of several objects in the scene.
There is very little work in the optimization of ac-
tive models with genetic algorithms (GA), mainly in
edge or surface extraction (Ballerini, 1999; S
´
eguier
and Cladel, 2003a) in 2D tasks. For instance, in
(Ballerini, 1999) the author developed the “genetic
snakes”, this is, snakes that minimize their energy by
means of genetic algorithms. In (Ib
´
a
˜
nez et al., 2009)
the authors proved the superiority of a global search
method by means of a GA in the optimization of the
Topological Active Nets model in 2D images. The
results showed that the GA is less sensitive to noise
than the usual greedy optimizations and does not de-
pend on the parameter set or the mesh size.
Regarding 3D images, the authors in (Jones and
Metaxas, 1997) used deformable contours to estimate
organ boundaries. They integrated region-based and
physics-based boundary estimation methods. Starting
from a single voxel within the interior of an object,
they made an initial estimate of the objects boundaries
using fuzzy affinity, which measures the probability
of two voxels belonging to the same object, together
with clustering. In (Qiu et al., 2004) the authors used
two deformable models: a deformable surface model
(SMD) and a Deformable Elastic Template (DET).
The main drawback of these models, as the authors
indicate, is that in both models an initial shape (sur-
face or ellipsoid) is needed as well as it must be manu-
ally positioned in the data/image. The same drawback
236
Novo J., G. Penedo M. and Santos J..
MULTIOBJECTIVE OPTIMIZATION OF THE 3D TOPOLOGICAL ACTIVE VOLUME SEGMENTATION MODEL.
DOI: 10.5220/0003144302360241
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 236-241
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

can be associated with adaptive deformable models,
typically with only surface modelling, which use a
reparameterization mechanism that enables the evo-
lution of surfaces in complex geometries. In (McIner-
ney and Terzopoulos, 1999) it is used a model of this
type with complex anatomic structures from medical
images.
The author in (Bro-Nielsen, 1994) used 3D “ac-
tive cubes” to segment medical images, where the au-
tomatic net division was a key issue. Since the greedy
energy-minimization algorithm proposed was sensi-
tive to noise, an improved greedy algorithm inspired
by a simulated annealing procedure was also incorpo-
rated. In (Novo et al., 2007) the authors proposed a
GA with new defined operators for the segmentation
process using TAV structures. The genetic approach
overcame some drawbacks, basically in images with
different types of noise, with regard to the work pro-
posed in (Barreira and Penedo, 2005). The main prob-
lem of the TAV model, as in other deformable models,
is that it is necessary an experimental tuning of the
parameters that weights the different energy compo-
nents that are used for the optimization of the model.
These weights are usually very dependent on the kind
of image to segment.
Multiobjective Optimization Algorithms (MOAs)
give a solution to this problem by considering the
optimization of several objectives in parallel. The
MOAs usually work with conflicting objectives try-
ing to identify a set of optimal trade-off solutions or
nondominated solutions which is called the Pareto
Set. Multiobjective Optimization Evolutionary Al-
gorithms (MOEAs) (Deb, 2001; Jaimes and Coello,
2009), use the principles of evolutionary computing
to the search of the Pareto Set. We used in this work
one of the best-established algorithms of this type,
SPEA2 algorithm (Zitzler et al., 2002). We tested the
advantages that add the use of the MOEA method-
ology in the optimization of the active volume de-
formable models. There is practically no work using
MOEAs applied to deformable models. In the work
(S
´
eguier and Cladel, 2003b), a multiobjective opti-
mization of different energy components was devel-
oped to the optimization of snakes in an audio-visual
speech recognition task. The authors optimized two
snakes to fit the external and interior lips contours, us-
ing only a small limited number of contour points for
each snake. After the evaluation of the snakes energy
components, the chromosomes were ranked and, this
way, the Pareto optimal solutions were searched. Ac-
cording to the authors, the multiobjective optimiza-
tion required less iterations than an usual genetic op-
timization.
2 TOPOLOGICAL ACTIVE
VOLUMES. DEFINITION OF
OBJECTIVES
A Topological Active Volume (TAV) is a discrete im-
plementation of an elastic n−dimensional mesh with
interrelated nodes (Barreira and Penedo, 2005). The
model has two kinds of nodes: internal and exter-
nal, which represents different object features: the ex-
ternal nodes fit the edges whereas the internal nodes
model their internal topology.
As in other deformable models, the state of the
model is governed by an energy function, composed
of an internal and an external energy term. The in-
ternal energy controls the shape and the structure of
the net whereas the external energy represents the ex-
ternal forces which govern the adjustment process.
These energies are composed of several objectives
and in all the cases the aim is their minimization.
Internal Energy Objectives. The internal energy de-
pends on first and second order derivatives which con-
trol the contraction and bending of the mesh, respec-
tively:
E
int
(v(r, s,t)) = α(|v
r
(r, s,t)|
2
+ |v
s
(r, s,t)|
2
+ |v
t
(r, s,t)|
2
) +
β(|v
rr
(r, s,t)|
2
+ |v
ss
(r, s,t)|
2
+ |v
tt
(r, s,t)|
2
)+
2γ(|v
rs
(r, s,t)|
2
+ |v
rt
(r, s,t)|
2
+ |v
st
(r, s,t)|
2
)
(1)
where the subscripts represents partial derivatives and
α, β and γ are coefficients controlling the first and
second order smoothness of the net.
External Energy Objectives. The external energy
represents the features of the scene that guide the ad-
justment process:
E
ext
(v(r, s,t)) = ω f [I(v(r,s,t))] +
ρ
ℵ(r,s,t)
∑
n∈ℵ(r,s,t)
1
||v(r,s,t)−v(n)||
f [I(v(n))]
(2)
where ω and ρ are weights, I(v(r, s,t)) is the in-
tensity value of the original image in the position
v(r, s,t), ℵ(r,s,t) is the neighborhood of the node
(r, s,t) and f is a function of the image intensity,
which is different for both types of nodes. If the ob-
jects to detect are bright and the background is dark,
the energy of an internal node will be minimum when
it is on a position with a high grey level. Also, the
energy of an external node will be minimum when it
is on a discontinuity and on a dark point outside the
object. So, the function f is defined as:
f [I(v(r,s,t))] =
IO
i
(v(r, s,t)) + τIOD
i
(v(r, s,t)) internal nodes
IO
e
(v(r, s,t)) + τIOD
e
(v(r, s,t))
+ ξ(G
max
− G(v(r, s,t)))
+ δGD(v(r, s,t)) external nodes
(3)
where τ, ξ and δ are weights, G
max
and G(v(r,s,t))
are the maximum gradient of the image and the gradi-
ent of the input image in node position v(r,s,t), IO is
a term we called “In-Out” and IOD a term called “dis-
tance In-Out”, and GD(v(r,s,t)) is a gradient distance
MULTIOBJECTIVE OPTIMIZATION OF THE 3D TOPOLOGICAL ACTIVE VOLUME SEGMENTATION MODEL
237

term. The IO terms minimize the energy of those indi-
viduals with the external nodes in background inten-
sity values and the internal nodes in object intensity
values meanwhile the terms IOD act as a gradient:
for the internal nodes (IOD
i
) its value minimizes to-
wards brighter values of the image, whereas for the
external nodes its value (IOD
e
) is minimized towards
low values (the background).
The greedy (Barreira and Penedo, 2005) and the
genetic algorithm (GA) (Ib
´
a
˜
nez et al., 2009) aim is
the optimization of a global objective defined as the
sum of the individual objectives weighted with the ex-
posed parameters: α, β, γ, ω, ρ, ξ, δ and τ. (Novo
et al., 2007) includes the definition of the genetic op-
erators used with a GA: arithmetic crossover, muta-
tion of a node, mutation of a group of neighboring
nodes, shift of a mesh and spread of a mesh. In the
case of the evolutionary Multiobjective Optimization
(MO), most of the segmentations will use the follow-
ing energy terms as independent objectives: the β en-
ergy component as a term that provides smoothness,
and a summed of IOD
i
(only internal nodes) and GD.
Thus, we merged both compatible properties as only
one objective.
3 ADAPTED SPEA2 ALGORITHM
SPEA2 (Zitzler et al., 2002) is an improved version of
the Strength Pareto Evolutionary Algorithm (SPEA).
The new version incorporates a fine-grained fitness
assignment strategy and a density estimation tech-
nique. In this section, we describe these two key as-
pects and our own adaptations.
The algorithm considers, in each generation t, a
regular population P
t
of size N and an archive P
t
(ex-
ternal set). This archive contains the nondominated
solutions and possibly some dominated solutions if
the number of nondominated solutions is less than its
size. The size of the archive (N) is fixed and initially
the archive is empty (P
0
=
/
0).
The fitness assignment takes into account domi-
nations between individuals and incorporates density
information into its calculation. First, a raw fitness
R(i) is calculated based on the number of individuals
that dominates an individual i:
R(i) =
∑
j∈P
t
+P
t
, ji
S( j) (4)
where S( j) represents the “strength” of individ-
ual j, that is, the number of individuals it dominates.
This raw fitness of an individual i is calculated using
the dominations in both the archive and population
set. This way, the individuals of the Pareto Set have a
value R = 0, whereas a high value of R means that the
individual is dominated by many other individuals.
If several nondominated individuals have the same
raw fitness, a density estimation is incorporated to dis-
criminate between them. Thereafter, a density D(i) is
then calculated:
D(i) =
1
σ
k
i
+ 2
(5)
The term σ
k
i
represents the distance from i to its
k − th nearest neighbor, being k =
p
N + N, taking
into account any member of the archive set and pop-
ulation. Finally, adding both terms, the individual fit-
ness is calculated as:
F(i) = R(i) + D(i) (6)
The k−distance defined in SPEA2 uses the entire
population to calculate the distances (Eq. 5). In-
stead, we consider only the nondominated ones, be-
cause these are the individuals mainly contained in the
archive, which is used for producing the new individ-
uals in the new population. We gain speed because we
calculate only a small portion of the distances com-
pared to the original algorithm.
Additionally, instead of the original k−distance,
we calculate an average k−distance as follows. First,
after sorting the list of distances for each individual
in increasing order, we consider only a window of
the list represented by the 8th part of the closest in-
dividuals. Finally, the distance σ
k
i
is an average over
the k-distances that represent the 25%, 50%, 75% and
100% positions on that window. That way, the dis-
tance σ
k
i
gives a more accurate view of the level of
neighborhood of an individual, and with emphasis in
the immediate neighborhood.
The next step in the algorithm is the environmen-
tal selection which defines how the archive maintains
the Pareto Front. In each generation we get a new
set of nondominated individuals in P
t
and P
t
, and the
archive must be updated taking into account the fixed
size restriction N. The archive update operation has
to consider all possible situations: If the total size of
the nondominated set is equal to (
N) all the new non-
dominated individuals are copied to the archive. If the
archive is large, not only the new nondominated indi-
viduals are copied to it, but also the best N − |P
t+1
|
dominated individuals. If it is small, the worst non-
dominated individuals in terms of fitness are removed
until |P
t+1
| = N, using a truncation operation.
The termination condition is checked next. If it is
satisfied, the output is the set of decision vectors rep-
resented by the nondominated individuals in P
t+1
. If
the stopping condition is not met, then mating selec-
tion is performed. We used tournament selection with
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
238

replacement on P
t+1
to fill the mating pool. Then, re-
combination and mutation operators are applied to the
mating pool setting P
t+1
to the resulting population.
Concretely, we applied an arithmetical crossover
and mutation operators, as well as other ad hoc oper-
ators previously developed for the optimization of the
active model with a GA as proposed in (Novo et al.,
2007). Figure 1 shows an example of the arithmetical
crossover between two parents to produce two new
individuals (TAVs) with average topologies between
the two selected parents. Moreover, we incorporated
elitism, defined over each objective. This means that
we maintain in the next generation (in the external
archive) the best individuals that minimize each one
of the objectives. By doing this, we maintain the in-
dividuals of the extremes of the Pareto Front in the
next generation. We used this option with the objec-
tives that the user can consider as the most important
to minimize, as can be the case of the IOD
i
/GD that
optimizes the external contour segmentation.
Figure 1: Arithmetical crossover operator. 1
st
row, selected
parents. 2
nd
row, offspring after the crossover.
4 RESULTS
This section presents some representative results ob-
tained with the methodology developed. To test
the method, we selected some representative images
taken from different domains: artificial images, that
were designed to show its capabilities, and CT im-
ages, taken from the medical domain to test the pro-
cess in a real one. Every image is composed by a
given number of slices, normally between 90 and 130,
that compose the 3D image. This set is the input to the
procedures which calculate the different energy terms.
In the multiobjective processes we used an archive
size of 100 individuals and a population size of 2000
individuals. The tournament size was a 3% of the
archive size. We also used elitism over the IOD
i
/GD
objective to keep in the population the individual with
the best adjustment to the object contour.
Table 1: TAV parameter sets of the GA 2nd phase in the
segmentation processes of the examples.
Figure α β γ ω ρ ξ δ τ
3 (b) 2.0 1.5 0.1 1.0 4.5 5.0 10.0 1.0
3 (c) 2.0 1.5 0.1 10.0 4.5 5.0 10.0 10.0
Firstly, we tested the method with artificial im-
ages. In Figure 2 the results obtained with different
images are shown. The 1
st
row shows the original im-
age to be segmented or a composing slice (first col-
umn), the 3
rd
row shows an intermediate individual
taken from the Pareto Front and 2
nd
and 4
th
rows rep-
resent the extremes of the Pareto Front for each ob-
jective β and IOD
i
/GD, respectively. These meshes
shown in Figure 2, 2
nd
row, correspond to the best
segmentations regarding the β objective (smoothness)
with the optimum values (best possible smoothness)
because the procedure creates the initial random TAVs
with cubic and regular distributions of the nodes.
Nevertheless, although the best individual regarding
such objective is present from the beginning, it acts
as a point that delimits and forces the progression of
the trade-offs nondominated individuals of the Pareto
Front. As we can see in the results, the individual that
optimizes the IOD
i
/GD objective provided the best
adjustment to the contour that the process could ob-
tain. In all the trade-offs obtained from the middle
of the Pareto Front we can point out the compromise
obtained between the smoothness and the contour de-
tection searched in the extremes of the Pareto Front.
Figure 2: Results obtained in the segmentation of artificial
images. 1
st
row, original image. 2
nd
row, best individual by
β objective. 3
rd
row, intermediate nondominated individual.
4
th
row, best individual by IOD
i
/GD objective.
We also tested the methodology developed with
artificial images specially designed with a higher level
MULTIOBJECTIVE OPTIMIZATION OF THE 3D TOPOLOGICAL ACTIVE VOLUME SEGMENTATION MODEL
239
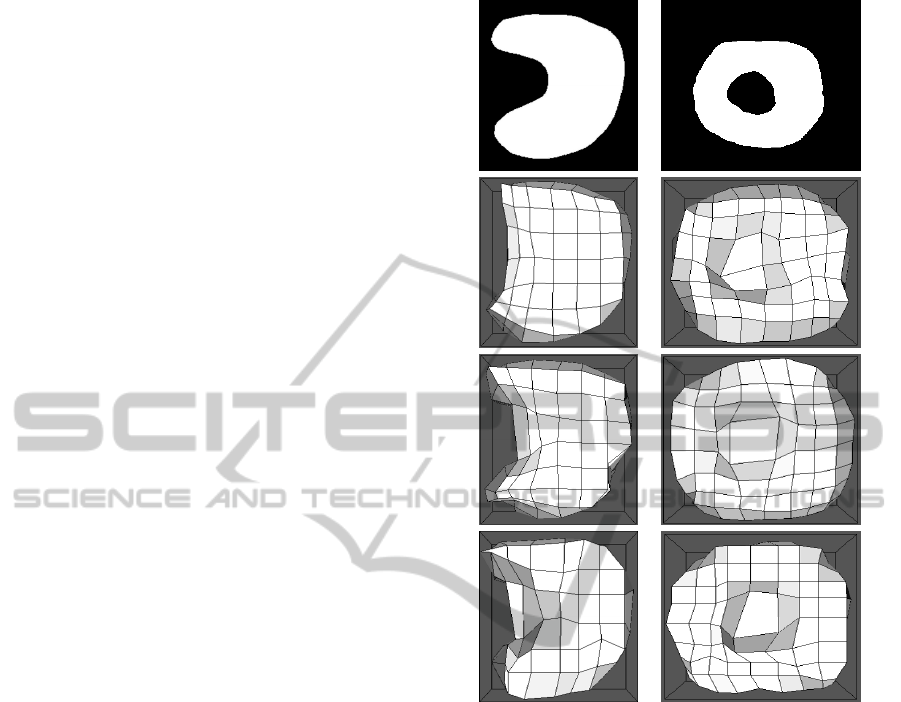
of complexity, in particular containing objects with
deep concavities and holes. In Figure 3, two seg-
mentation examples are shown. These 3D images are
composed by the given slices repeated over 90 times.
In this case we include the results obtained with
a genetic algorithm (GA) to show the main problem
of a single-objective optimization procedure. As ex-
plained in (Novo et al., 2007) two evolutionary phases
are needed: a first evolutionary stage to obtain indi-
viduals (TAVs) that detect and cover the object and a
second stage to improve the adjustment progressively.
The parameters used in the first phase of the GA pro-
cesses were always the same. The values employed
were: α = 0.00001, β = 0.00001, γ = 0.0, ω = 1.0,
ρ = 1.0, ξ = 0.0, δ = 10.0, τ = 0.0. For the sec-
ond phase of the GA processes we depict in Table 1
the tuned parameters that were used. The GA used
a population size of 2,000 individuals and a tourna-
ment size of 3% of the population. The GA method
using a typical parameter configuration (Table 1, first
row, parameters tuned for different kinds of no com-
plex images) cannot obtain a correct detection of the
holes and concavities. This is shown, for example,
in Figure 3, 2
nd
row, where some internal nodes fall
in the hole, which is not correctly delimited. In this
case it is necessary to perform a specific tuning of the
parameters (Table 1, second row) to detect them (forc-
ing the weight parameters ω and τ to high values), as
shown in Figure 3, 3
rd
row. However, the multiobjec-
tive method, due to the IOD
i
/GD objective, preserved
individuals of the Pareto Front that perform a correct
detection in these complex areas. This can be seen
in Figure 3, 4
th
row, representing the best individual
from the Pareto Front considering the mentioned ob-
jective, IOD
i
/GD.
Other kind of images that were used to test the
methodology were CT images taken from the medical
domain. Thus, we can analyze the segmentation re-
sults in a real domain. In Figure 4 three representative
examples are shown presenting a high level of com-
plexity or a significant level of noise surrounding the
surface of the objects. The proposed method provided
a correct segmentation of the objects in these diffi-
cult situations. The nondominated individuals corre-
spond to those which minimize the IOD
i
/GD objec-
tive. Figure 4, 1
st
row, corresponds to a foot. The in-
put images are noisy CT images of different slices of
such foot. Due to the complex surface of this object,
we performed a previous stage in this segmentation to
obtain a population of individuals that firstly identify
the boundary of the foot. This follows the process of
2 stages or evolutionary phases as proposed in (Novo
et al., 2007) with a GA. In a first stage, or localization
and boundary detection stage, we used IO and GD as
Figure 3: Results obtained in the segmentation of complex
objects. 1
st
row, slice of the original image. 2
nd
row, fi-
nal results with the GA method and typical parameters. 3
rd
row, final results with the GA method and specific param-
eters. 4
th
row, nondominated individuals at the end of the
evolutionary process.
objectives, and then a second stage to refine the results
using the mentioned objectives of β and IOD
i
/GD.
The second example corresponds to a vertebra
from CT slices. The nondominated selected individ-
ual delimits correctly the internal hole, performing a
reasonable boundary detection. The third one corre-
sponds to the segmentation of a humerus. In this case,
the CT images are very noisy, with an additional ex-
ternal contour (the flesh of the leg) that the optimiza-
tion method must avoid. Moreover, the boundary of
the bone is fuzzy. This can be seen in the final non-
dominated and selected individual, where a group of
external nodes stretch the mesh in a extreme to de-
limit the brighter area of the bone boundary, as the
CT images of such extreme indicate.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
240
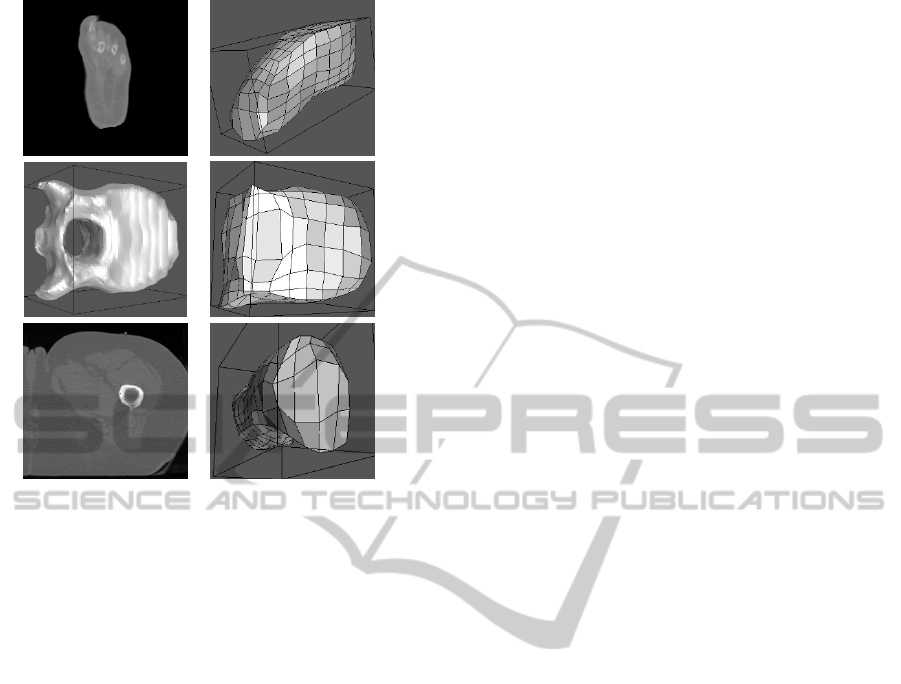
Figure 4: Results obtained in the segmentation with real im-
ages. First column, CT slice or 3D reconstruction of the ob-
ject to segment. Second column, example of nondominated
individual at the end of the evolutionary process.
5 CONCLUSIONS
In this paper, we presented a new approach to the en-
ergy minimization task in the Topological Active Vol-
ume model for image segmentation. The proposed
multiobjective method is inspired in the SPEA2 algo-
rithm, being adapted to our specific application. We
incorporated the classic genetic operators as well as
new ad-hoc ones, including some modifications as a
new density estimation technique used to define the
fitness of an individual.
The main problem of previous methods for the
optimization task, as a greedy algorithm or a GA,
is the need of a experimental tuning of the parame-
ters that weight the energy terms in order to obtain
correct segmentations in each kind of images. This
drawback is directly solved with the multiobjective
method. Moreover, our MO approach works with two
objectives that summarize all the characteristics we
need for a segmentation process (smoothness, bound-
ary adjustment, detection of irregularities), so a single
evolutionary phase was required in most of the cases.
Additionally, the designer can choose from the final
Pareto Front a trade-off segmentation or one which
minimizes a particular required objective.
ACKNOWLEDGEMENTS
This paper has been funded by the Ministry of Science
and Innovation of Spain (project TIN2007-64330)
and by the Instituto de Salud Carlos III (grant contract
PI08/90420) using FEDER funds.
REFERENCES
Ballerini, L. (1999). Medical image segmentation using ge-
netic snakes. In Proceedings of SPIE: Application and
Science of Neural Networks, Fuzzy Systems, and Evo-
lutionary Computation II, volume 3812, pages 13–23.
Barreira, N. and Penedo, M. G. (2005). Topological Ac-
tive Volumes. EURASIP Journal on Applied Signal
Processing, 13(1):1937–1947.
Bro-Nielsen, M. (1994). Active nets and cubes. Technical
Report 13, IMM, Technical University of Denmark.
Deb, K. (2001). Multi-objective optimization using evolu-
tionary algorithms. Wiley, Chichester, UK.
Ib
´
a
˜
nez, O., Barreira, N., Santos, J., and Penedo, M. (2009).
Genetic approaches for topological active nets opti-
mization. Pattern Recognition, 42:907–917.
Jaimes, A. and Coello, C. (2009). Multi-objective evolu-
tionary algorithms: A review of the state-of-the-art
and some of their applications in chemical engineer-
ing. In World Scientific, pages 61–90.
Jones, T. N. and Metaxas, D. N. (1997). Automated 3D seg-
mentation using deformable models and fuzzy affinity.
15th International Conference on Information Pro-
cessing in Medical Imaging - LNCS, 1230:113–126.
Kass, M., Witkin, A., and Terzopoulos, D. (1988). Snakes:
Active contour models. International Journal of Com-
puter Vision, 1(2):321–323.
McInerney, T. and Terzopoulos, D. (1999). Topology adap-
tive deformable surfaces for medical image volume
segmentation. IEEE Transactions on Medical Imag-
ing, 18(10):840–850.
Novo, J., Barreira, N., Santos, J., and Penedo, M. G. (2007).
Topological active volumes optimization with genetic
approaches. XII Conference of the Spanish Associa-
tion for the Artificial Intelligence, 2:41–50.
Qiu, B., Clarysse, P., Montagnat, J., Janier, M., and Vray, D.
(2004). Comparison of 3D deformable models for in
vivo measurements of mouse embryo from 3D ultra-
sound images. In Ultrasonics Symposium, 2004 IEEE,
Vol. 1, pages 748–751.
S
´
eguier, R. and Cladel, N. (2003a). Genetic snakes: Appli-
cation on lipreading. In International Conference on
Artificial Neural Networks and Genetic Algorithms.
S
´
eguier, R. and Cladel, N. (2003b). Multiobjectives genetic
snakes: Application on audio-visual speech recogni-
tion. In 4th EURASIP Conference, pages 625–630.
Tsumiyama, K. and Yamamoto, K. (1989). Active net: Ac-
tive net model for region extraction. IPSJ SIG notes,
89(96):1–8.
Zitzler, E., Laumanns, M., and Thiele, L. (2002). SPEA2:
Improving the strength pareto evolutionary algorithm.
In EUROGEN 2001, Evolutionary Methods for De-
sign, Optimisation, and Control, pages 95–100.
MULTIOBJECTIVE OPTIMIZATION OF THE 3D TOPOLOGICAL ACTIVE VOLUME SEGMENTATION MODEL
241
