
DETERMINING COOPERATION IN MULTIAGENT SYSTEMS
WITH CULTURAL TRAITS
Stefan Heinrich, Stefan Wermter
Department of Informatics, Hamburg University, Hamburg, Germany
Markus Eberling
Department of Computer Science, University of Paderborn, Paderborn, Germany
Keywords:
Adaptation, Altruism, Cooperation, Cultural traits, Multiagent Systems.
Abstract:
Achieving cooperation among autonomous and rational agents is still a major challenge. In the past, altruistic
cooperation was generally explained through genetic kinship relations. However, the theory of ‘cultural kin’
is an approach that tries to explain altruism through cultural relatedness. To promote cooperation among
autonomous and rational agents, this work transfers the idea of cultural characteristics, which benefits social
behaviour, to multiagent systems (MAS). Accordingly, agents are characterised by cultural traits, which they
can imitate from their neighbours and are supposed to solve tasks, for which they need the cooperation of
other agents in most cases. The interaction of cooperation and cultural trait propagation will be investigated
in a theoretical analysis and in an empirical simulation in a particular developed framework. As a novelty,
schemata will be analysed that are beyond the well-studied one-to-one interaction.
1 INTRODUCTION
During the last years the interest in multiagent sys-
tems has increased noticeably (Shoham and Leyton-
Brown, 2008). The idea of solving problems by dis-
tributing them among autonomous agents was taken
up continually in theoretical and practical contexts.
Moreover, problem areas have emerged, in which
autonomous entities are supposed to optimally ex-
ploit limited resources through the use of coopera-
tion (for example bandwidth or computation capac-
ity of peer-to-peer networks). An issue, which is still
not satisfactorily dealt with, is how cooperation can
be achieved among those autonomous and rational
agents, if there is the appeal of cheating.
The contribution of this work is an analytical anal-
ysis of a modelled multiagent system, which was pro-
posed similarly in (Hales, 2001; Klemm et al., 2005)
and (Eberling, 2009). The agents of such a MAS
carry several cultural traits but have only limited local
knowledge of their neighbours’ traits. Additionally,
our agents hold weightings of theirs traits, which are
completely invisible to others. Every agent randomly
and continuously receives jobs, most of which he can
only solve with the help of cooperating and altruistic
partners. Similar to the prisoner’s dilemma, the global
benefit for all agents strongly increases if coopera-
tion – preferably of a reciprocal nature – takes place.
Agents adapt to their best neighbours through imita-
tion, which implies that particular trait values will be
propagated more intensively than others. However we
will show that this propagation of cultural traits is lim-
ited by the agents’ fundamental disposition to cooper-
ate. The model’s dynamics and the model itself have
been discussed for several decades but the new ana-
lytical approaches provide a better understanding of
these models and cooperation in MAS in general.
In the field of biology and other disciplines expla-
nations for cooperation and reciprocal altruism were
initially found exclusively in the kinship relations:
supporting related organisms - even at one’s own ex-
penses - will serve the own genes and thus indi-
rectly yourself (Axelrod and Hamilton, 1981; Trivers,
1971). Cultural norms, which seem to be responsible
for altruism in the absence of genetic relatedness, and
their propagation in societies, was a topic of inten-
sive research during the last decades (Allison, 1992;
Axelrod, 1986; Axelrod, 1997; Binmore, 1998; Boyd
and Richerson, 1985; Delgado, 2002). In conjunction
with norms, ideas and behavioural patterns were un-
173
Heinrich S., Wermter S. and Eberling M..
DETERMINING COOPERATION IN MULTIAGENT SYSTEMS WITH CULTURAL TRAITS.
DOI: 10.5220/0003142801730180
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 173-180
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

derstood as cultural traits, which represent a cultural
relatedness (Dawkins, 1976). Under the metaphor of
cultural evolution (Heylighen, 1992), cooperation on
the basis of cultural traits as well as their propaga-
tion were further analysed. Transferred to the con-
text of artificial societies or in particular to multiagent
systems, they were increasingly labelled as ‘features’,
‘memes’ or ‘tags’.
With his Swap Shop Framework, Hales (Hales,
2001) analysed the cooperation in artificial societies:
agents shared resources that were essential for sur-
vival on the basis of cultural relatedness (memetic
kin). For this reason each agent carried three cultural
traits memes including an altruistic trait and was able
to learn traits from his neighbours. In Hales empiri-
cal analysis, setups with cultural evolution as well as
with genetic evolution lead to an identical dominance
of single groups with a specific trait-setting. Never-
theless, they occurred much faster within the cultural
evolution which provides some evidence of the im-
pact of cultural traits. Furthermore, he found out that
the distribution of resources through cultural evolu-
tion was more efficient and lead to a more social be-
haviour.
On the basis of Axelrod’s Cultural Diffusion
Model (Axelrod, 1997) Klemm et al. evaluated un-
der which terms the propagation of cultural traits con-
verges to stable conditions and what those might look
like (Klemm et al., 2005). Their agents were con-
nected through a one-dimensional lattice and had var-
ious features, which they infrequently adapted to a
feature of one of their neighbours. The adaptation
was only depending on a initial existence of a com-
mon feature. Depending on the amount of possible
traits per feature and the amount of the features them-
selves, the simulation arrived at an equilibrium: for an
initially high diversity of the features in a polarised
condition (several small homogeneous groups had
evolved) and for an initially low diversity in a glob-
alised condition (consistently homogeneous agents).
For each setting Klemm et al. determined a threshold,
under which a polarisation and over which a global-
ization occurred.
From the literature, we can adopt valuable ap-
proaches, which follow the idea empirically or ana-
lytically in small cases. With our work, we want to
go a step further and contribute analytical results for
more than a one-to-one interaction scheme.
In the next section we will formally present our
model. In section 3 we will present a theoretical anal-
ysis of the model and subsequently demonstrate some
substantiating experiments in section 4. In the last
section we will draw a conclusion and give an outlook
to future work.
2 THE MODEL
In this section we will outline our formal model. The
major aim of our concept is a multiagent system,
which follows the ideas of the literature (see above)
but still remains computable. In particular, we use
discrete ranges of sizes which are large enough but
finite for all parameters.
2.1 Formal MAS Description
Definition 1 (World). The world which contains the
agents A is a two-dimensional square lattice of a fi-
nite size m × n with the following parameters:
• |A| = m · n: the number of agents is defined by the
size of the lattice; every cell represents an agent
• Moore neighbourhood relation (see Figure 1)
• z ∈ N: range dimension of cultural trait values
• the world is a torus in order to avoid boundary
problems, therefore cell (m+1,n+1) = cell (1,1)
The dynamics of the world is divided in discrete time
slots (t), so-called rounds. At the outset the world is
initialised with the parameters and is static in the size
of the lattice, and thereby in its size of population.
All agents are distinctly defined by their position in
the world. The neighbours are the set of agents who
are known and available for interaction. The range
dimension of cultural trait values defines the range
{
1,...,z
}
, in which the values of cultural traits can
be located.
a
Figure 1: Moore neighbourhood.
Definition 2 (Agent). An agent a ∈ A is defined as
a =
N , f , g,q, s
with:
• N ⊆ A: neighbours of a, according to the neigh-
bourhood relation
• f = (u, v,w), u,v,w ∈
{
1,...,z
}
: cultural traits
• g = (g
u
,g
v
,g
w
), g
u
,g
v
,g
w
∈ ]0,1[, g
u
+ g
v
+
g
w
= 1: trait weightings
• q ∈
{
0,...,z − 1
}
: altruism threshold
• s ∈ Z: score, counting rewards and costs
The position of the agents results from the initialisa-
tion of the world. At the beginning the score is at 0
and the agents’ cultural traits are randomly selected
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
174

from the uniform distribution U(1,z). To determine
the weightings, the range [0,1] is divided at the in-
tersections ζ
1
and ζ
2
to receive three weightings ac-
cording to the length of the intervals [0,ζ
1
], [ζ
1
,ζ
2
],
and [ζ
2
,1]. Those weightings are randomly assigned
to the weightings g
u
, g
v
, and g
w
. The altruism thresh-
old defines the largest value of cultural difference, up
to which a cooperation is agreed on, and in this ap-
proach is a free variable (details below).
Definition 3 (Jobs). The set J is made of jobs j =
h
a,e
i
with:
• a ∈ A: agent to whom the job was assigned
• e ∈
1,...,
N
a
+ 1
: effort (amount of agents
needed) to solve the job
For solving an assigned job, the agent receives 2 · e
points. Every agent involved in solving this job, has
to pay costs of one point.
2.2 Behavioural Heuristics
Taken from the knowledge about human social be-
haviour, all agents follow two fundamental be-
havioural heuristics, which psychologists and sociol-
ogists assume to be most likely (Allison, 1992; Cial-
dini, 1994; Noble and Franks, 2004):
1. Be good to your close relatives (agents expect a
higher reciprocity from similar agents)
2. Imitate those who are successful (these agents
seem to have traits, which make them more suc-
cessful)
Implementing heuristic 1 means that every agent b ∈
N
a
cooperates with agent a, if the values of the cul-
tural traits do not vary widely from the values of the
cultural traits of agent a. This results in an amount of
cooperating agents (friends) F
a
of agent a with:
F
a
=
b ∈ N
a
|div(a,b) ≤ q
b
(1)
div(a,b) = |u
a
− u
b
| · g
u,a
+ |v
a
− v
b
| · g
v,a
(2)
+ |w
a
− w
b
| · g
w,a
Heuristic 2 is implemented through the follow-
ing procedure: all agents adapt their cultural traits
to the traits of the best agent in their neighbourhood.
With the probability ρ
a
agent a adapts his traits to his
neighbour b
∗
∈ N
a
with the highest score s
b
, as fol-
lowing:
u
0
a
=
(
u
a
+
d
(u
b
− u
a
) · (1 − g
u,a
)
e
, iff u
a
≤ u
b
u
a
+
b
(u
b
− u
a
) · (1 − g
u,a
)
c
, iff u
a
> u
b
(3)
v
0
a
=
(
v
a
+
d
(v
b
− v
a
) · (1 − g
v,a
)
e
, iff v
a
≤ v
b
v
a
+
b
(v
b
− v
a
) · (1 − g
v,a
)
c
, iff v
a
> v
b
(4)
w
0
a
=
(
w
a
+
d
(w
b
− w
a
) · (1 − g
w,a
)
e
, iff w
a
≤ w
b
w
a
+
b
(w
b
− w
a
) · (1 − g
w,a
)
c
, iff w
a
> w
b
(5)
therefore ρ
a
is defined by:
ρ
a
= P(Adapt.) =
(
1 −
1
1+(s
b
−s
a
)
, iff s
b
> s
a
0, else
(6)
To have the agents adapt their traits exclusively to
the actual situation, the adaptations take place sorted
in ascending order according to the scores (see Ober-
vation 1).
Observation 1 (X-Over-Freedom of Adaptations). If
an agent a adapts his cultural traits to the traits of
agent b then there exists no agent c who still would
need to adapt to the traits of agent a. If there exists
such an agent c, then as a necessary condition, agent
a is more successful than agent c. Furthermore, the
score of agent a is greater than the score of agent s,
i.e. s
c
< s
a
. As A is sorted ascendingly according to
s, agent c is dealt with before agent a.
2.3 Scenario Description
In every round, all agents evaluate their neighbour-
hood and in particular determine the amount of neigh-
bours which are willing to cooperate (friends F ).
Subsequently all agents get
N
+ 1
jobs to solve.
An agent has no limit with regard to the amount of
jobs he is able to solve per round. Only this agent
to whom the job was assigned is rewarded, while the
others, who were requested and accepted to help, have
to pay the costs. However, if an agent is not able to
find enough cooperating partners to solve a job, the
job will be discarded. At the end of each round every
agent identifies his best neighbour (role model) and
possibly adapts his cultural traits. For the outline see
Algorithm 1.
3 ANALYTICAL APPROACH
In this section the propagation of cultural traits will
be analysed in detail. Klemm et al. have empiri-
cally investigated that a propagation of cultural traits
in a multiagent system can lead to a globalisation (all
agents become increasingly homogeneous) or a po-
larisation (many small clusters) (Klemm et al., 2005).
By the MAS introduced in section 2, we analyse the
propagation and thereby examine small cases of the
adaptation convergence in detail. Subsequently, we
will explore how many adaptation steps need to be
DETERMINING COOPERATION IN MULTIAGENT SYSTEMS WITH CULTURAL TRAITS
175

performed until the cultural traits become adequately
similar. For a universal analysis the criterion ade-
quately similar is set on identical – with a deviation
of 0. Moreover, due to a restricted definition, only the
agents which are neighbours – thus know each other
and are able to interact – are considered. In the small-
est case (by disregarding the neighbourhood relations)
only two agents will interact with and imitate each
other.
Algorithms 1: Simulation.
1: Initialize m × n agents with traits f and weightings g
randomly
2: loop
3: for all agents a ∈ A do {Neighbourhood Evalua-
tion}
4: Determine F
a
5: end for
6: for all agents a ∈ A do {Job Solving}
7: Generate jobs J
a
randomly
8: for all jobs j ∈ J
a
do
9: if |F
a
| ≥ e
j
then
10: Determine and score payoff
11: end if
12: end for
13: end for
14: for all agents a ∈ A do {Imitation}
15: select b
∗
∈ N
a
16: with probability ρ
a
: adapt f
a
towards f
b
∗
17: end for
18: end loop
3.1 Convergency in 1 to 1 Adaptation
Taken into consideration are two agents a ∈ A and
b ∈ A with the assumption that a and b only adapt
to each other in each round. Accordingly, three cases
can be differentiated (see Figure 2):
a. Agent a adapts his cultural traits only to the traits
of agent b.
b. Agent a and b mutually adapt their cultural traits.
c. Agent b only adapts his cultural traits to the traits
of agent a.
a b
(a) Agent a to b
a b
(b) Mutually
a b
(c) Agent b to a
Figure 2: Cases of the 1 to 1 adaptation.
Subsequently, the analysis is restricted to the cul-
tural trait u. The analysis of the cultural traits v and
w follows analogously. As additional requirement ap-
plies: g
u,a
≥ g
u,b
. According to Section 2.2 the dis-
tance δ =
|
u
b
− u
a
|
can be defined and the adapta-
tion formula can be simplified (for a better readability
γ = g
u,a
is defined). According to case (a) agent a ex-
clusively adapts to agent b, therefore it follows (see
Observation 2):
δ
t+1
= δ
t
+ b(0 − δ
t
) · (1 − γ)c = bδ
t
γc (7)
Observation 2. For u
b
and u
a
applies: u ∈
{
1,...,z
}
.
The adaptation is performed in the direction of u
b
,
therefore in this adaptation step u
a
and therewith δ
do change but u
b
remains constant.
From δ =
|
u
b
− u
a
|
and u
a
≤ u
b
follows: δ = u
b
− u
a
and −δ + u
b
= u
a
. Consequently applies:
u
a
t+1
= u
a
t
+ d(u
b
− u
a
t
) · (1 − g
u,a
)e (8)
−δ
t+1
+ u
b
= −δ
t
+ u
b
+ d(u
b
− (−δ
t
+ u
b
)) · (1 − g
u,a
)e (9)
−δ
t+1
+ u
b
= −δ
t
+ u
b
+ d(u
b
+ δ
t
− u
b
) · (1 − g
u,a
)e (10)
−δ
t+1
= −δ
t
+ d(0 + δ
t
) · (1 − g
u,a
)e (11)
δ
t+1
= δ
t
+ b(−(0 + δ
t
) · (1 − g
u,a
))c (12)
δ
t+1
= δ
t
+ b(0 − δ
t
) · (1 − g
u,a
)c (13)
From δ =
|
u
b
− u
a
|
and u
a
> u
b
follows: δ = u
a
− u
b
and δ + u
b
= u
a
. Consequently applies:
u
a
t+1
= u
a
t
+ b(u
b
− u
a
t
) · (1 − g
u,a
)c (14)
δ
t+1
+ u
b
= δ
t
+ u
b
+ b(u
b
− (δ
t
+ u
b
)) · (1 − g
u,a
)c
(15)
δ
t+1
+ u
b
= δ
t
+ u
b
+ b(u
b
− δ
t
− u
b
) · (1 − g
u,a
)c
(16)
δ
t+1
= δ
t
+ b(0 − δ
t
) · (1 − g
u,a
)c (17)
With the simplification γ = g
u,a
it follows:
δ
t+1
= δ
t
+ b(0 − δ
t
) · (1 − γ)c (18)
Every adaptation step is decreasing the distance δ
depending on the weighting γ of the adapting agent.
Keeping in mind that γ ∈ ]0,1[, the adaptation steps
result in:
step 1 : bδγc
step 2 : bbδγc · γc ≤ bδγ
2
c
step 3 : bbδγ
2
c · γc ≤ bδγ
3
c
...
step t : bδγ
t
c
In the next step the point of time in which the cul-
tural traits (u) of the agent a and b become equal is
searched for. That is the number τ of the adaptation
steps according to which the difference is δ = 0. A
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
176

sufficient condition is:
bδγ
τ
c = 0 (19)
δγ
τ
< 1 (20)
δ <
1
γ
τ
= (γ
−τ
) (21)
log
(γ
−1
)
(δ) =
lg(δ)
lg(γ
−1
)
=
lg(δ)
−lg(γ)
< τ (22)
lg(δ)
−lg(γ)
= τ (23)
The derivation for case (c) follows analogously.
The case (b) can be estimated with case (a), as the
adaptation cannot take longer at the same distance δ
and a smaller or equal weighting (see Observation 3).
Observation 3 (Duration of 1 to 1 Adaptation).
With the condition g
u,a
≥ g
u,b
, it follows: The adap-
tation of the cultural traits of agent a to the traits of
agents b takes at least as long as a mutual adapta-
tion or the adaptation of the cultural traits of agent b
to the traits of agent a. Let us assume, at any point
t
0
of the adaptation, agent b adapts his cultural traits
to the traits of agent a. However, as agent b has a
weighting of g
u,b
≤ g
u,a
at his command it follows di-
rectly that δ
t
0
+1
= δ
t
0
+ b(0 − δ
t
0
) · (1 − g
u,b
) leads to
an approximation that is larger than or equal to the
approximation of the inverted case a to b. This obser-
vation implies that at any point of time an adaptation
from b to a does not cannot need more steps.
Thus, case (a) is the worst case in the 1 to 1 con-
vergence. If the weightings of the cultural traits are
equal, then the worst case is equivalent to the best
case: every agent reduces the distance with about the
same ratio.
3.2 Convergence in k to 1 Adaptation
If those k agents are considered, which interact with
agent a, three cases of convergence can be distin-
guished as well (see Figure 3). The number k of
agents in consideration depends on the neighbour-
hood relation, which implies that some agents in the
world can interact with agent a.
a. Agent a adapts his cultural traits only to the traits
of agent b
i
with i ∈
{
1,...,k
}
, while all other
agents b
j
with j ∈
{
1,...,i − 1, i + 1,k
}
adapt
their traits to the traits of agent a.
b. The agents a and b
i
with i ∈
{
1,...,k
}
mutually
adapt their cultural traits to each other. All other
agents adapt their traits to the traits of agent a.
c. All agents b
i
with i ∈
{
1,...,k
}
adapt their cul-
tural traits only to the traits of agent a.
a b
1
b
3
b
2
(a) Agent a to b
i
a b
1
b
3
b
2
(b) Mutually
a b
1
b
3
b
2
(c) Agent b
i
to a
Figure 3: Cases of the k to 1 adaptation.
Table 1: Examples for case (a) of the k to 1 adaptation.
t u
b
i
u
a
u
b
j
0 1 5 9
1 1 2 6
2 1 1 3
3 1 1 2
4 1 1 1
t u
b
i
u
a
u
b
j
0 1 5 1
1 1 2 4
2 1 1 3
3 1 1 2
4 1 1 1
g
u,b
i
= g
u,a
= g
u,b
j
=
1
3
.
For the analysis of case (c) the equation of the
1 to 1 adaptation for all agents (b
1
,...,b
k
) can be
adopted. However, the number of adaptation steps τ
until convergence depends on the largest distance of
all agents towards agent a.
τ = max(τ(b
1
),.. .,τ(b
k
)), (24)
lg(δ
i
)
−lg(γ
i
)
= τ(b
i
), δ
i
=
|
u
a
− u
b
i
|
, γ
i
= g
u,b
i
In the cases (a) and (b) it needs to be considered
that the cultural trait value (of u) of the agent b
i
can be
smaller than the cultural trait value of agent a and his
cultural trait value can be smaller than the values of
another agent b
j
(see Table1, left side). Another pos-
sible extreme is that the agents b
i
and b
j
have identical
cultural trait values and do equally differ from agent
a (see example in Table 1, right side).
Subsequently, the adaptation of b
j
over a to b
i
needs to be computed. For that reason the number
of adaptation steps can be added up and descriped as
following:
τ = τ(b
i
)
+ max(τ(b
1
),.. .,τ(b
i−1
),τ(b
i+1
),.. .,τ(b
k
)),
(25)
lg(δ
i
)
−lg(γ
i
)
= t(b
i
), δ
i
=
|
u
a
− u
b
i
|
, γ
i
= g
u,b
i
3.3 Convergence in Unrestricted
Adaptation
To expand the observation of the convergence in unre-
stricted adaptation of finite k agents, it is important to
emphasise that role models can change in the course
of the adaptation or even after a complete adaptation
DETERMINING COOPERATION IN MULTIAGENT SYSTEMS WITH CULTURAL TRAITS
177

Table 2: Example for case (b) of the unrestricted adaptation.
t Agent b
0
Agent b
1
Agent b
2
Agent b
3
u RM u RM u RM u RM
0 1 - 4 b
0
3 b
1
2 b
2
1 1 - 2 b
3
4 b
0
3 b
2
2 1 - 3 b
3
2 b
1
4 b
0
3 1 - 4 b
0
3& b
1
2 b
2
g
u,b
i
=
1
3
, ∀b
i
∈ {b
0
,...,b
3
},RM = Role Model
to a particular agent. Due to this circumstance two
cases, which need to be analysed separately, emerge
(see Figure 4).
a. For all agents applies: The role models do not
change, although it is possible that several agents
share the same model.
b. The role models of one agent can change. It is
possible, in particular, that the models alternate
cyclically.
b
1
b
3
b
2
b
0
0
(a) Identical order
t=0: t=1:
b
1
b
3
b
2
b
0
b
1
b
3
b
2
b
0
t=2:
b
1
b
3
b
2
b
0
(b) Alternating order
Figure 4: Cases of the unrestricted adaptation.
To be able to analyse an unrestricted adaptation
between k agents with identical order (case (a)), a de-
composition of the problem can be used. Due to the
cyclic freedom of a model-follower relation (see Ob-
servation 1) for every model a k to 1 convergence to
his followers can be computated. As all adaptations to
different role models happen simultaneously, an up-
per bound can be identified:
τ = 2 · max(τ(b
1
),.. .,τ(b
i−1
),τ(b
i+1
),.. .,τ(b
k
)) − 1
(26)
lg(δ
i
)
−lg(γ
i
)
= τ(b
i
), δ
i
=
|
u
a
− u
b
i
|
, γ
i
= g
u,b
i
An alternating adaptation between k agents (case
(b)) does not result in a guaranteed bound for a con-
vergence. In the worst case the order of the mod-
els can vary after each round, so that the same cul-
tural trait values remain in various agents. Table 2
shows an example for such an arrangement which
could never lead to a convergence.
As a result it can be stated that a convergence to
identical cultural traits can emerge, if a single agent is
the role model during the adaptation steps or if there
exists an invariant hierarchy between the agents. If
there are several models which also alternate, then a
convergence cannot be guaranteed.
4 EMPIRICAL VALIDATION
This section presents some empirical results to under-
line our analytical approach. We have simulated a lat-
tice with 64 · 64 = 4096 agents over 500 rounds in
a framework developed particularly for this purpose.
The range dimension of cultural trait values was set to
z = 64 whereby the cultural trait values of all agents
were situated in {1,. ..,64}. All cultural traits were
weighted equally with g
u
= g
v
= g
w
=
1
3
. According
to section 2.3, the agents had to solve jobs and were
able to adapt to their neighbours.
4.1 Influence of Altruism Threshold
Subsequently, we will describe the results of the vari-
ation of the altruism threshold q, which was the same
for all agents. The graphs in Figure 5 show the first
100 rounds of the simulation and are the results of 100
independent runs, which were averaged.
For a configuration of the altruism threshold with
q = 24, almost 100% of the jobs were already solved
after 25 rounds. In addition, in the case of such altru-
istic agents, a stable state is reached soon, so that after
a few rounds a solved job rate of 97% is reached. Ev-
ery smaller setting of q leads to a slower development
towards stable states and also to a smaller job solving
rate. Nonetheless, the simulation shows that even for
small values of q a lower bound with 72% of solved
jobs is reached: The solved job rate of q = 0 and q = 4
runs identically after 30 rounds - the only difference
is a slower convergence to this stable state for q = 0.
To measure the intensity of the cultural trait prop-
agation, we determined and averaged the extent of
the adaptation steps for every trait and agent in every
round. The cultural trait propagation in the settings
q = 0, q = 4 and q = 8 comes to a stagnancy: af-
ter 30 rounds no distinctive adaptations can be identi-
fied. In this process the curves approximate varyingly
quick to the zero line: For q = 8 most quickly and for
q = 4 and q = 0 increasingly slower. For the settings
q = 16 and q = 24 a continuous adaptation, which
only slowly gets smaller, takes place.
For each cultural trait, we computed the mean
and the standard deviation of the trait values over
all agents to measure the ‘trait diversity’. Averaged
over the traits u, v and w, the standard deviation of
the cultural trait diversity points out that the trait va-
riety in small settings of q hardly decreases. After a
minor adaptation wave in the first 10 rounds, the di-
versity starts to increase and finally remains consis-
tent. For larger values of q the cultural trait variety
continuously decreases until it stagnates for q = 16 at
σ = 11.78 and for q = 24 at σ = 4.34.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
178
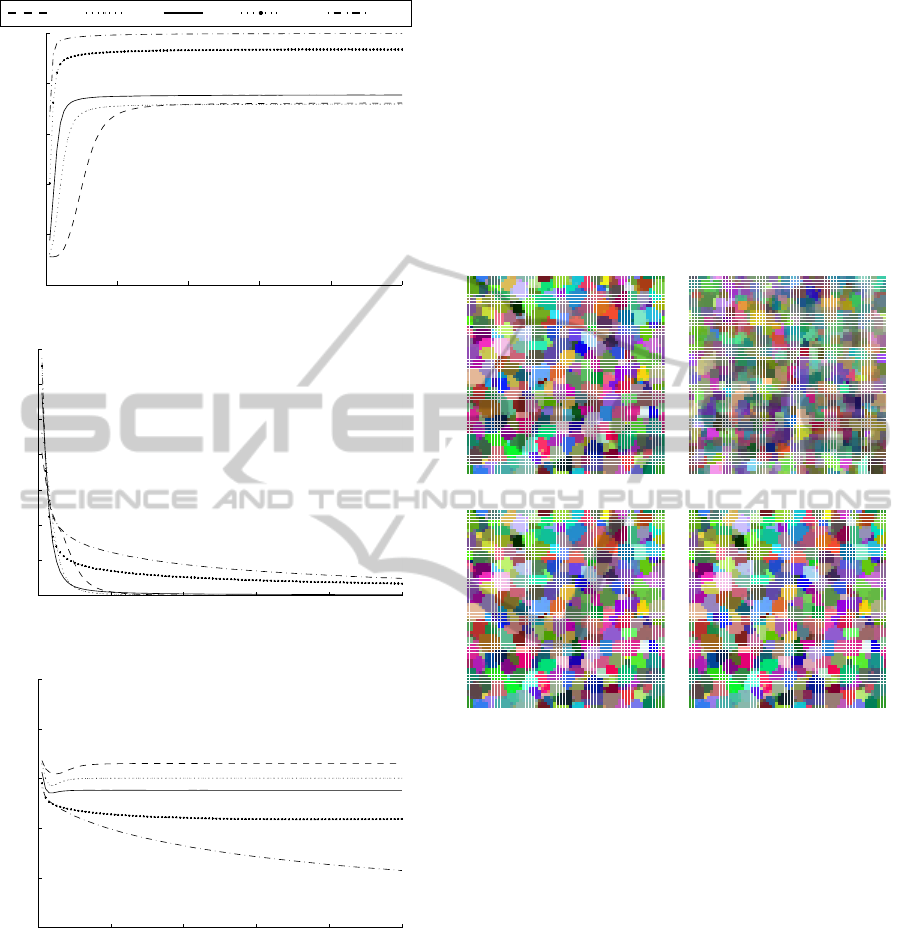
q=0 q=4 q=8 q=16 q=24
0 20 40 60 80 100
0
20
40
60
80
100
Round [t]
Solved Jobs Rate [%]
(a) Job solving: Jobs solved rate per round.
0 20 40 60 80 100
0
5
10
15
20
25
30
35
Round [t]
Avg. Trait Adaptation Rate [z]
(b) Cultural trait propagation: Average trait adaptation rate
per round.
0 20 40 60 80 100
0
5
10
15
20
25
Round [t]
Avg. Std.Dev. of Trait Value Diversity [z]
(b) Cultural trait propagation: Average standard deviation
of cultural trait value diversity per round.
Figure 5: Simulation results for variation of the altruism
threshold q.
4.2 Shape of Polarisation and
Globalization
In Figure 6 snapshots of the state of the world at the
points of time t = 10 and t = 100 are compared (al-
ways for the upper and lower extreme of the varied
parameter q). Those snapshots were recorded for typ-
ical runs of the parameter characteristics and are rep-
resentative for all runs. Each cell represents an agent,
for whom the cultural trait values were transferred to
the RGB-colour-values (red = 256/z ·(u −1),green =
256/z · (v − 1),blue = 256/z · (w − 1)). In the initial
state t = 0 snapshots show a unstructured distribution
of all colours (not displayed). The purpose of this il-
lustration is a visual comparison for surveying trait
similarities in parts of and in the whole world respec-
tively.
(a1) q = 0, t = 10 (b1) q = 24, t = 10
(a2) q = 0, t = 100 (b2) q = 24, t = 100
Figure 6: Comparison of state snapshots of typical runs for
variation of the altruism threshold q.
Those snapshots of the states of the world reveal
that for small q many small sections with similar cul-
tural trait values emerge. Already after ten rounds
a polarised world for q = 0 has formed, which con-
tains clusters that are almost as large as a Moore-
neighbourhood (3×3 agents). For large q the margins
of smaller areas appear blurred, and with increasing
numbers of rounds continuously larger areas with av-
erage cultural trait values emerge. In this process the
cultural traits gradually spread over the whole world:
the agents don’t face a stable cultural trait configura-
tion until the whole world has become homogeneous.
Accordingly, a globalisation evolves.
DETERMINING COOPERATION IN MULTIAGENT SYSTEMS WITH CULTURAL TRAITS
179

5 CONCLUSIONS & FUTURE
WORK
To determine cooperation in multiagent systems with
cultural traits, this work explored trait propagation
and its interaction with cooperation. In contrast to
only empirical work (Hales, 2001; Klemm et al.,
2005), our analytical approach showed that in a MAS
with cultural traits: 1. It is possible that distinctive
traits will spread completely over a population and
converge to a specific traits setting. 2. Under certain
conditions, a propagation can stagnate. Through em-
pirical experiments we have found that the basic dis-
position for altruistic behaviour of course has a major
influence on the propagation of traits and thus in sec-
ond place positively affects the cooperation and vice
versa. Above all, these results confirm the claim by
(Klemm et al., 2005) that there is a threshold, which
divides between polarisation and globalisation. If the
willingness to cooperate, and thereby confidence and
sympathy are generally high, the cultural traits spread
quickly over the whole population and evoke more
confidence and sympathy. In the case of very selfish
agents who are unwilling to cooperate, the existence
of more successful agents in the neighbourhood leads
to a only local cultural trait propagation and thereby
to more cooperation within this cluster.
In future work agents can to a minor degree ran-
domly replace cultural traits through completely dif-
ferent ones (mutation) and will be able to get to know
new agents and abandon existing contacts (mobil-
ity). Furthermore, agents will possess various abil-
ities, so that jobs, which require various abilities,
can be solved only by distinctive cooperation partners
(see (Eberling, 2009; Edmonds et al., 2009)). Addi-
tional work in this field could contribute to explain
the accomplishment of cooperation in networks with
many individuals and many different cultural traits.
REFERENCES
Allison, P. D. (1992). The Cultural Evolution of Beneficent
Norms. Social Forces, 71(2):279–301.
Axelrod, R. (1986). An Evolutionary Approach to Norms.
The American Political Science Review, 80(4):1095–
1111.
Axelrod, R. (1997). The Complexity of Cooperation.
Princeton University Press.
Axelrod, R. and Hamilton, W. D. (1981). The Evolution of
Cooperation. Science, 211(4489):1390–1396.
Binmore, K. (1998). Game Theory and the Social Contract:
Just Playing, volume 2. The MIT Press.
Boyd, R. and Richerson, P. J. (1985). Culture and the Evo-
lutionary Process. University of Chicago Press.
Cialdini, R. B. (1994). Influence: The Psychology of Per-
suasion. New York: Quill.
Dawkins, R. (1976). The Selfish Gene. Oxford University
Press.
Delgado, J. (2002). Emergence of Social Conventions in
Complex Networks. Artificial Intelligence, 141:171–
185.
Eberling, M. (2009). Towards Determining Cooperation
based on Multiple Criteria. In Mertsching, B., Hund,
M., and Aziz, Z., editors, KI 2009. LNCS, vol. 5803,
pages 548–555. Springer, Paderborn.
Edmonds, B., Norling, E., and Hales, D. (2009). Towards
the Evolution of Social Structure. Computational &
Mathematical Organization Theory, 15(2):78–94.
Hales, D. (2001). Tag Based Co-operation in Artificial So-
cieties. PhD thesis, Department of Computer Science,
University of Essex, UK.
Heylighen, F. (1992). ’Selfish’ Memes and the Evolution of
Cooperation. Journal of Ideas, 2(4):70–76.
Klemm, K., Eguluza, V. M., Torala, R., and Miguela, M. S.
(2005). Globalization, Polarization and Cultural Drift.
J. Economic Dynamics and Control, 29:321–334.
Noble, J. and Franks, D. W. (2004). Social Learning in
a Multi-Agent System. Computing and Informatics,
22(6):561–574.
Shoham, Y. and Leyton-Brown, K. (2008). Multiagent
Systems: Algorithmic, Game Theoretic, and Logical
Foundations. Cambridge University Press.
Trivers, R. L. (1971). The Evolution of Reciprocal Altru-
ism. The Quarterly Review of Biology, 46(1):35–57.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
180
