
A SOCIAL ROBOT FOR FACILITATING HUMAN RELATIONS
IN SMART ENVIRONMENTS
Berardina De Carolis, Nicole Novielli, Irene Mazzotta and Sebastiano Pizzutilo
Dipartimento di Informatica, Università degli Studi di Bari “Aldo Moro”, Bari, Italy
Keywords: Social robots, Social facilitator, Social network analysis.
Abstract: This paper describes how a robot may use social network analysis measures for facilitating social relations
when acting as a “host” in a smart environment. The robot’s main goal consists in welcoming people,
facilitating contacts and information sharing among people present in the environment. It uses knowledge
on the structure of the social network for selecting the most appropriate strategy to create new relations or to
spread information in the most effective way. To this aim, a multiagent system has been implemented for
simulating and evaluating the functioning of the social facilitator.
1 INTRODUCTION
According to several research studies, Ambient
Intelligence (AmI) should be used not only for
providing task-oriented services but it should
include also social-oriented assistance in order to
facilitate human contacts, information broadcasting
and sharing, and to enhance community-oriented
services (Shadbolt, 2003). We developed a
multiagent system that aims at facilitating the
communication, interaction and sharing between
people in a Social Network (SN) located in the same
physical place (e.g. recreation places for elderly
people, meeting rooms, parties, fitness centers). As
interface, we employ a robot acting as Social
Facilitator (SF) among people present in the
environment and between them and the environment
services: social robots, in fact, can provide an
appropriate medium for facilitating relations in
public spaces due to their presence (Sakamoto et al.,
2007). In particular the SF can be seen as a “host”
that welcomes and guides people in the
environment, in order to facilitate the establishment
of social relations between people that do not know
each other, and to favour information spreading and
sharing among peers. To this aim, the SF has to
exhibit social competencies and, therefore, it has to
understand the existing relations among peers, using
Social Network Analysis (SNA) (Scott, 1991).
The system has been tested through a simulation
of a “recreation center for elder people”. Results
obtained so far show that the adopted approach is
successful for improving social relations in the
place, integrating isolated people and connecting
subgroups.
The paper is structured as follows: Section 2
presents the architecture of the system and provides
an example of application. A framework for the
system evaluation, conclusions and future work
directions are discussed in Section 3.
2 SYSTEM ARCHITECTURE
The system has been implemented using JADE
(
http://jade.tilab.com/) and JUNG (http://jung.source
forge.net/index.html
) and it is composed by: Peer
Agents, representing people in the smart
environment, the SNA Agent, handling information
about the SN, the Social Facilitator (SF), which has
the main goal of increasing the cohesion of the
social network, the Sniffer, which observes
exchanges among peers. Let’s see the structure of
these agents in more details.
Peer Agent: represents a person in the smart
environment. It maintains dynamically the model of
the interests, preferences, friendship, liking and
disliking relations of the person it represents. The
profile is updated dynamically according to the
creation of new relations among peers. It is
structured as follows: Id of the peer in the network,
Personal data (name, email, age, profession),
Relations with other people in the environment,
380
De Carolis B., Novielli N., Mazzotta I. and Pizzutilo S..
A SOCIAL ROBOT FOR FACILITATING HUMAN RELATIONS IN SMART ENVIRONMENTS.
DOI: 10.5220/0003142403800384
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 380-384
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

Liking and disliking of other members, Spoken
language (used a peer when communicating),
Known languages (the other languages that the peer
knows), Disabilities in hearing, seeing, speaking and
moving, Interests (e.g. hobbies, recreational
activities, and so on, expressed as a confidence
level), Preferences (e.g. food, movies, etc.), Privacy
issues (the profile can be made accessible to nobody,
to the environment, to everybody or only to friends).
To test our system in a real environment we have
associated a RFID to each person that enters in the
place. In this way we can dynamically monitor the
presence of that person in the environment and
activate the corresponding peer agent. At the
moment the member’s profile is acquired explicitly
through an interface when the RFID is associated to
a person.
The SNA Agent monitors the evolution of the
network by gathering information about each
member. It uses this information to compute
measures useful for understanding the various roles
and groupings in the network, e.g. who is the leader,
which agents act as connectors, which are the
isolated peers and so on. The main behaviours of
this agent are:
a. Information Gathering: in this phase the SNA
collects information about each member of the SN
from the corresponding Peer agent. Moreover, for
debugging purposes, it provides a graphical
visualization of the current state of the SN.
b. SN Elaboration: it calculates the requested
sociometric measures (Haythornthwaite, 1996;
Scott, 1991). In the proposed application context the
following measures are considered:
Density indicates the degree of cohesion of the
network. It allows verifying that SF actions are
actually improving social relations in the
community;
Connectivity of a node expresses the number of
nodes that should be deleted from the network to
disconnect two persons. It can be used to find the
highly popular members that can help to foster
information spreading or the integration of isolated
peers in the network;
Geodetic distance represents the shortest path
between two nodes. It can be used by the SF to put
in contact an isolated peer with the closest network
member with which he shares some interests;
Centrality can be used to evaluate the importance
of each member of the network (i.e. the leader of a
group). Centrality can be specialized as: Degree
centrality, to measure the number of direct
connections; Closeness centrality, to identify the
shortest path to other nodes; Betweenness centrality,
to identify intermediary members between important
portions of the network. For example, people with
high closeness centrality are very effective for
spreading and monitoring information flow while
members with high betweenness centrality can be
seen as good brokers and therefore have a great
influence on information flow between subgroups;
Similarity among members of the network can be
used for integrating isolated peers. Among the
several similarity measures that can be used, we
decided to employ the Pearson correlation
coefficient (Rodgers and Nicewander, 1988), taking
into account the profession and the interests present
in the member profile;
Clique Analysis allows identifying subgroups in
the SN. It can be used for connecting subgroups.
c. Communication: the SNA agent exchanges
messages with the other agents and in particular with
the SF about the overall SN situation.
Social Facilitator Agent: it acts as an intermediary
among the network members. Its main goal is to
select communication forms and artefacts according
to the situation of the social network. It has been
modelled and implemented as a BDI agent (Rao and
Georgeff, 1991), whose beliefs are facts about the
state of the SN. Beliefs are represented as BEL SF
u, where u is a fact concerning:
one of the measures provided by the SNA agent
(e.g. Density(n, 0,76) represents the fact that the
density of the network n is 0,76);
friendship relations among network members
(e.g. Friend(u
i
,u
j
) indicates that there is a binary
friendly relation between the members u
i
and u
j
);
dislike relations (e.g. Dislike(u
i
,u
j
) indicates that
there is a unidirectional relation indicating that u
i
dislikes u
j
);
predicates about members (e.g. Predicate(u
i
,z)
where z is a value or a fact; for instance Is-
Interested(u
1
,fishing)).
The SF Goals are of two types: Persistent Goals (P-
GOALs) denote the agent’s nature and mission, and
guide its reasoning while Contingent Goals are
triggered by the situation.
The SF has the P-GOALs of taking care of
people present in the environment and increasing the
number of relations among members in the
environment. The first goal may be formalized as:
(P-
GOAL SF (BEL SF (welcomed(u
i
)))) AND (P-GOAL SF (BEL SF
(confortable(u
i
)))) AND (P-GOAL SF (BEL SF
(NOT(isolated(u
i
))))) where u
i
represents a member of
the SN. The second goal may formalized as the
A SOCIAL ROBOT FOR FACILITATING HUMAN RELATIONS IN SMART ENVIRONMENTS
381

achievement of the maximum density of the SN,
(P-
GOAL SF (BEL SF (Density(net,max)))). This goal can be
achieved by modifying the initial state of the SN
until all members are connected. However reaching
a density equal to 1 may not be always possible
since, for instance, there can be members that really
dislike each other or that do not have anything in
common or that pursue different goals. The SF will
abandon a persistent goal when it has been achieved
or when it believes it is not possible to achieve it.
Contingent goals are triggered by contextual
needs (e.g. satisfying a request of a member or a
request of the environment of spreading important
information as quickly as possible, solving conflicts,
etc.). To achieve these goals, the SF executes
conditional plans stored in a library (Cavalluzzi et
al., 2003). At this stage of the project we have
defined plans for the three contingent goals: a)
integrating isolated peers, b) connecting subgroups,
c) spreading information.
a. Integration of isolated Peer: The SF should
integrate isolated peers in existing groups or it
should connect isolated peers among them for
creating a new subgroup. To integrate an isolated
peer, the SF puts her in contact with another member
by promoting a conversation.
The selection of the most appropriate node, among
those similar to the isolated one, is made as follows:
after receiving the ordered list of similar nodes, the
SF evaluates the appropriateness of a node by
considering its centrality, connectivity and
betweeness centrality. Then, the SF selects the
member that is more popular by calculating a rank as
rank=sim*sum(a*f(centrality),b*f(connectivity),c*f(betweeness)) (1)
where coefficients a, b, c allow tuning the function
according to the situation. In our evaluation scenario
we gave a higher priority to centrality and
connectivity than to betweeness by setting the value
of a and b to the double of the value of c.
Once the node has been selected, the SF has to
find an artefact for promoting a conversation with
the isolated one. To this aim it proposes arguments
considering the minimum gap between the
confidence values among their common interests.
If they do not have any common interest the SF
tries with another member (with the rank
immediately lower) otherwise it will decide to
connect the isolated peer to the member with the
most popular member (highest value of centrality).
The dialog management strategy adopted by the SF
is an extension of the methodology proposed in (De
Carolis and Cozzolongo, 2007).
b. Groups Connection: The SF may decide to
connect two different groups to facilitate the
interaction among their members. In this case the
strategy involves selecting (i) members with the
highest betweeness centrality in the two groups and
(ii) a topic taking into account interests of the two
subgroups. As group modelling strategy (Masthoff,
2004) for understanding interests of subgroups, we
applied a weighted average of preferences. Then, if
there is a common node between two groups, this is
used as a bridge for promoting common arguments;
on the contrary, the ones with the highest leadership
(calculated as in (1)) can be put in contact with each
other, using the same strategy described for the
integration of isolated peers.
c. Spreading Information: The strategy we
implemented so far is the following: a list of peers
belonging to every group of the SN is created
according to their degree of betweeness centrality.
Then the SF starts contacting those belonging to the
largest groups and selects among them the node that
is closest in terms of distance to this one, and so on.
If there are isolated peers that have not been
integrated in the SN yet, the SF will contact each of
them and communicate the information. In all plans
the SF communicates with the SNA for requesting
data and measures concerning the situation of the
network or for informing the SNA of its action
effects.
Sniffer Agent: its main goal is to constantly monitor
the SN through overhearing (Fan and Yen, 2005;
Busetta et al., 2001). The Sniffer has to understand
the shallow dialogue dynamics of the networks: this
monitoring activity should be conducted
continuously to have, at every time of the
interaction, the updated image of what is going on in
the SN. The Sniffer will apply conversational
analysis techniques, enabling the SF to both (i)
prevent (or even solve) conflicts and (ii) favour
fruitful exchanges among peers with similar features
and goals. In this perspective it is also important to
understand what is the task of each interaction
among couples or groups of peers (e.g., Information
Seeking, Negotiation etc.) and what is the attitude
the interlocutors are showing towards each other
(e.g., cooperative vs. individualistic, or warm vs.
cold, etc.). The history of the interaction will serve
as a basis for conversational analysis. In particular,
our Sniffer agent will employ Hidden Markov
Models for dialogue pattern analysis, using an
approach similar to the one described in (Novielli,
2010).
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
382
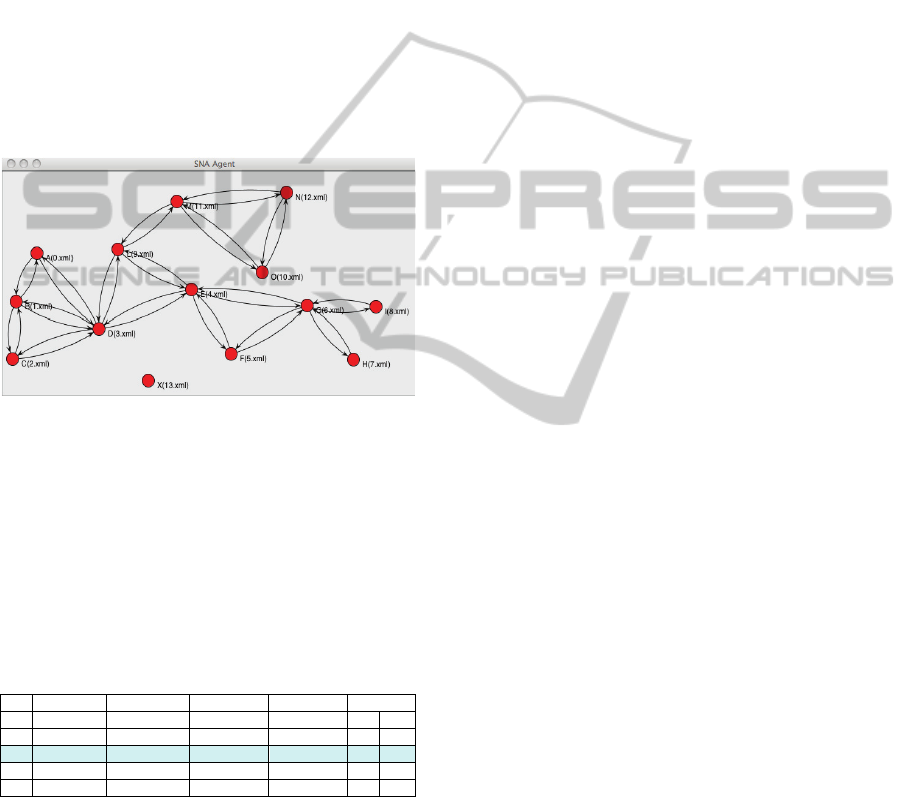
2.1 An Example
Let’s consider the scenario of a recreation center for
elderly people. The SF, represented by AIBO,
interacts with 14 people; 13 of them are divided in 3
subgroups that are in 3 different rooms of the place:
G1=(A,B,C,D), G2=(E,F,G,H,I) and G3=(L,M,N,O);
some members know only some elements of each
group as described in Figure 1.
The initial density of the graph is 0.37. X just
arrived in the center and can be considered an
isolated peer. The SF constantly monitors the state
of the SN by asking information to the SNA and it
receives the information regarding the fact that X is
isolated. Therefore the SF tries to integrate it by
applying the strategy described in Section 2.
Figure 1: The SN sociogram.
Let’s assume that A, B, H, D, L are, in the order,
members that are more similar to X (in the current
setting, nodes with a similarity level above or equal
to 0,5 are considered). Taking into account their
rank (see Table 1), the peer represented by the node
D results as the most suitable to be contacted by the
SF and for promoting a conversation about a
common interest.
Table 1: Selection of the best candidate of the sociogram.
ID Centrality Connectivity Betweeness Similarity(X) Rank
A (3) 4,17 (3) 4 (1) 0 0,8 10,4
7
B (8) 8,26 (8) 6 (8) 1 0,75 30 2
D (12) 120,44 (12) 10 (12) 55 0,65 39 1
H (1) 2,08 (1) 2 (1) 0 0,7 3,5 9
L (11) 114,26 (8) 6 (11) 54 0,5 24,5
3
Let’s suppose that the best common interest
between X and D is “Art”. Then the SF introduces X
to D, promoting a conversation about Art. An
example of possible move by the SF is: ‘Good
Morning D, I’m pleased to introduce you X. She is
just arrived. X, like you, is interested in art.’ In case
of conversation between D and X failing because of
lack of interest in the proposed argument or because
of some kind of resistance to start the friendship
relation, the SF tries with the next candidate node in
the list. When the integration succeeds the SN and
the SF beliefs are updated accordingly.
3 CONCLUSIONS
The described framework allows simulating and
evaluating the behaviour of a robot acting as social
facilitator in a smart environment. The system has
been evaluated through the simulation of 25
different scenarios in the described domain. For each
scenario we formalized the peer profiles and,
consequently, the structure of the social network and
a set of rules describing the dynamic of the
interaction among peers. Randomly we assigned a
level of resistance in order to establish a friendship
relation (0, no resistance – 1, resistance). Results
show that in the majority of cases (16) the social
facilitator’s strategies successfully increased the
density of the network. In the rest of cases, the
integration of isolated peers and the subgroups
connection failed due either to absence of common
arguments or to antipathy (simulated through the
resistance variable) towards the isolated peer or
among leaders of subgroups.
In our future work, besides enriching the
formalization of the peer agent mental state with
extra-rational factors (personality traits, moods,
emotions), we intend to endow it with the ability of
reasoning by taking into account these factors to
simulate social intelligence towards other peers.
REFERENCES
Cavalluzzi, A., De Carolis, B., Carofiglio, V., Grassano,
G., 2003. Emotional Dialogs with an Embodied Agent.
User Modeling 2003, pp. 86-95.
De Carolis, B. Cozzolongo, G., 2007. Planning the
Behaviour of a Social Robot Acting as a Majordomo
in Public Environments. In AI*IA 2007, pp. 805-812.
Busetta, P., Serafini, L., Singh, D., Zini, F., 2001.
Extending Multi-Agent Cooperation by Overhearing.
In Sixth ICCIS, pp. 40-52.
Fan, X., Yen, J., 2005. Conversation Pattern-based
Anticipation of Teammates' Information Needs via
Overhearing. In IEEE/WIC/ACM Conference on
Intelligent Agent Technology, pp. 316-322.
Haythornthwaite, C., 1996. Social network analysis: An
approach and technique for the study of information
exchange. Library and Information Science Research,
18 (4), pp. 323-342.
A SOCIAL ROBOT FOR FACILITATING HUMAN RELATIONS IN SMART ENVIRONMENTS
383

Masthoff, J., 2004. Group modeling: Selecting a sequence
of television items to suit a group of viewers. UMUAI
14(1), pp. 37-85.
Novielli, N. 2010. HMM modeling of user engagement in
advice-giving dialogues. JMUI 3(1-2) pp. 131-140.
Rao, A. S., Georgeff, M. P., 1991. Modelling rational
agents within a BDI-Architecture. In SICPKRR, pp.
473-484.
Rodgers, J. L., Nicewander, W. A., 1988. Thirteen ways to
look at the correlation coefficient". The American
Statistician 42, pp. 59-66.
Sakamoto, D, Ono, T, 2006. Sociality of robots: do robots
construct or collapse human relations? In 1st ACM
SIGCHI/SIGART, pp 355–356.
Scott, J., 1991. Social network analysis: A handbook.
Sage, London.
Shadbolt, N., 2003. Ambient Intelligence. IEEE Intelligent
Systems, 18(4).
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
384
