
A GAME THEORETIC BIDDING AGENT
FOR THE AD AUCTION GAME
Yevgeniy Vorobeychik
Sandia National Laboratories, Livermore, CA, U.S.A.
Keywords:
Bidding agents, Keyword auctions, Game theory.
Abstract:
TAC/AA (ad auction game) provides a forum for research into strategic bidding in keyword auctions to try
out their ideas in an independently simulated setting. We describe an agent that successfully competed in the
TAC/AA game, showing in the process how to operationalize game theoretic analysis to develop a very simple,
yet highly competent agent. Specifically, we use simulation-based game theory to approximate equilibria in a
restricted bidding strategy space, assess their robustness in a normative sense, and argue for relative plausibility
of equilibria based on an analogy to a common agent design methodology. Finally, we offer some evidence
for the efficacy of equilibrium predictions based on TAC/AA tournament data.
1 INTRODUCTION
Trading Agent Competition (TAC) is a successful fo-
rum for research into competitive agent design in
an independent, highly complex, simulation environ-
ment. The ad auction game was recently introduced
with a specific focus on several key strategic aspects
of the keyword auction environment, carefully styl-
ized into a TAC/AA simulation. We developed our
agent to compete in TAC/AA, focusing primarily on
a simulation-based game theoretic approach to en-
lighten bidding strategy.
There has been much discussion about the norma-
tive and descriptive value of Nash equilibria in actual
strategic settings such as the one faced by a TAC/AA
agent. Historically, the use of game theory has been
relatively rare in agent design, even in the TAC tour-
naments (see (Wellman et al., 2006) for an exception).
One reason that agent designers often eschew game
theoretic techniques is that in general there may be
many equilibria, and the problem of equilibrium se-
lection requires coordination among the agents. Ad-
ditionally, any asymmetric equilibrium requires coor-
dination on roles. Finally, other agents may be im-
perfectly rational in a variety of ways (for example,
buggy). These are valid issues which reveal consid-
erable methodological uncertainty in operationalizing
game theoretic techniques even if we believed them
to be reasonable in a particular setting (i.e., when op-
ponent agents are rational and attempt to maximize
their payoffs). Our main contribution is to offer some
general guidance to agent designers in operationaliz-
ing game theory, which we illustrate in the context of
TAC/AA bidding strategy.
Our bidding strategy analysis restricts the consid-
eration set to discretized linear strategies that compute
a fraction of the myopic value per click to bid. We
perform simulation-based game theoretic analysis in
this restricted strategy space to (a) identify equilibria,
(b) suggest equilibrium selection techniques, and (c)
evaluate robustness of various possible strategies. We
find, for example, that a particularly appealing equi-
librium, one reached by iterative best response seeded
with truthful bidding, is also very robust and is actu-
ally a best response to a range of reasonable opponent
strategies.
Finally, we assess predictive value of equilibrium
bidding policies derived using simulations based on
actual tournament data, finding that predictions pro-
gressively improve over the span of the tournament,
becoming relatively accurate on some measures.
2 THE TAC/AA GAME
The TAC/AA game features eight autonomous soft-
ware agents representing advertisers in a simulated
keyword (ad) auction. The advertisers interact with
the environment by submitting bids and ads to be
shown for a set of keywords over a sequence of 60
simulated days, each lasting 10 seconds. The envi-
ronment itself is comprised of the publisher (search
engine) agent, who collects the bids and ads from the
35
Vorobeychik Y..
A GAME THEORETIC BIDDING AGENT FOR THE AD AUCTION GAME.
DOI: 10.5220/0003140900350044
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 35-44
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

advertisers and displays the ads on the search page
ordered by a ranking rule, as well as 90000 users
who search for keywords, click on ads, and make pur-
chases (conversions) from the advertisers. This inter-
action scheme between the agents is depicted visually
in Figure 1. Next we describe in some detail the agent
tasks and TAC/AA simulator implementation.
1
!"#$%#&'
()*+'
!"#$%&'()*
+,-./0*1-2,*
"&()&*
34&*
5"()%(&* !")6'3&(&*
347()8&()*
347()8&()*
347()8&()*
347()8&()*
347()8&()*
347()8&()*
347()8&()*
347()8&()*
6$%69&*
:*
Figure 1: Schematic of the TAC/AA game.
2.1 Advertiser Agents
A TAC/AA advertiser agent plays a role of a retailer
of home entertainment products. Each product is
a combination of a manufacturer and a component
(e.g., Lioneer TV). The game features three manufac-
turers and three components, for a total of nine prod-
ucts. While all advertisers are able to sell all products,
every advertiser specializes in a manufacturer and a
component. The manufacturer specialization yields a
1.5 factor increase in profits from sales, while compo-
nent specialization results in a boost (roughly a factor
of 1.5) in conversion rates.
An advertiser may submit a bid and an ad for any
keyword and on any simulation day, to take effect on
the following day. In addition, he may specify a bud-
get constraint that limits spending for each keyword
individually, as well as for an entire day. Only two
ad types are allowed: generic (default) and targeted,
which specifies a product. Advertiser’s total payoff
is the sum of his revenues from product sales less all
per-click costs over the span of a simulation.
1
For more details, see (Jordan and Wellman, 2009).
2.2 Publisher
The publisher has two tasks: ranking advertisers for
each keyword and computing advertiser payments per
click. An advertiser a is endowed at the beginning
of a game (simulation) with a baseline click-through-
rate (CTR) e
a
q
for each keyword q, which is only re-
vealed to the publisher. Given a collection of bids
b
a
q
, advertisers are ranked by a score b
a
q
(e
a
q
)
χ
, where
χ ∈ [0,1] is chosen and revealed to advertisers at the
beginning of each game.
2
The payments per click are
determined according to the generalized second-price
(GSP) scheme (Lahaie and Pennock, 2008). Specif-
ically, suppose that advertisers are indexed by their
rank (i.e., advertiser with a = 1 is ranked in the first
slot). Then the payment of advertiser a is
p
a
=
b
a+1
q
(e
a+1
q
)
χ
(e
a
q
)
χ
,
that is, the score of the advertiser ranked immediately
below, divided by his click-through-rate to the power
χ. An exception to this payment rule arises when the
reserve price r
a
of a slot a (the slot in which a is
placed) is higher than p
a
, in which case the advertiser
simply pays r
a
. When an advertiser drops out due to
saturating a budget constraint, rank and payments per
click are recomputed for the remaining ads.
2.3 Search Users
Each of 90000 users has a specific product preference
and will only purchase his preferred product. User
preferences are distributed evenly across all products.
A user may submit three kinds of queries (key-
words): F0, F1, and F2. A unique F0 query spec-
ifies neither the manufacturer nor the component of
the user’s preferred product. Six F1 queries partially
reveal a user’s preference: three specify only the man-
ufacturer and three only the component of the desired
product. Finally, nine F2 queries completely reveal
the user’s preferred product (specify both the manu-
facturer and the component).
A user’s behavior is determined by his “state”. In-
deed, a user may not even submit search queries, or
may submit queries and click on ads with no intent
to purchase. In the latter case, such “informational”
users select uniformly among the three queries (F0,
F1, or F2) to submit to the publisher. Finally, a “fo-
cused shopper” submits a query depending on his “fo-
cus level” (0, 1, or 2) corresponding to the three key-
word classes above (thus, for example, a user in fo-
cus level 1 submits a F1 query). A user in a focused
2
See (Lahaie and Pennock, 2008) for a discussion of this
class of ranking rules.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
36

state makes a purchase (given a click) with conversion
probability described below. Transitions between user
states are Markovian, but non-stationary, as any user
who actually makes a purchase is effectively “reset”.
Consequently, user state distribution is affected by ad-
vertiser decisions.
After a keyword search, a user proceeds down the
list of ads in a Markovian fashion, clicking on an ad
he currently “views” with probability determined by
the baseline CTR e
a
q
of that ad, as well as the targeting
effect, which is negative if the advertised product does
not match a user’s preference, positive if it does, and
neutral if the ad is generic.
Upon clicking an ad, the probability that a user
subsequently makes a purchase depends on three
factors: user’s state, advertiser’s specialty, and ad-
vertiser’s capacity. Users in an “informational”
state may click on ads, but never make a purchase.
A focused shopper will purchase with probability
η(I
d
π
q
, f
c
), where
η(p,x) = px/(px + (1 − p)),
π
q
is a baseline conversion rate that depends on the
keyword q, f
c
is a factor that is 1.5 if the advertiser
specializes in the component preferred by the user and
1 otherwise. Finally,
I
d
= 0.995
(
∑
d
i=d−4
c
i
−C
a
)
+
,
with C
a
a capacity constraint of the advertiser, d cur-
rent day, and c
i
advertiser’s sales on day i. Note that
the value of I
d
on day d changes dynamically with
each sale on that day (i.e., as c
d
changes).
3 TOURNAMENT
15 participants registered for the TAC/AA tourna-
ment, which proceeded in three rounds: qualifying
rounds, semifinals, and finals. No agents were elim-
inated in the qualifying rounds, as all were deemed
competent enough to proceed. The eight top scoring
agents from the semifinal round competed in the fi-
nals. The final ranking of the top agents is shown in
Table 1. Our agent, QuakTAC, finished with the fourth
highest score, a mere 1.25% below the third-place fin-
isher and 2.38% below the second place.
4 AGENT DESIGN
The decision environment in which a TAC/AA agent
acts is very complex, with much uncertainty and de-
cision interdependence between keywords and days.
Table 1: Final ranking for the TAC/AA tournament.
Rank Agent Average Score
1 TacTex 79,886
2 AstonTAC 76,281
3 Schlemazl 75,408
4 QuakTAC 74,462
5 munsey 71,777
6 epflagent 71,693
7 MetroClick 70,632
8 UMTac09 66,933
Thus, the process of designing and building an agent
must of necessity involve two aspects: an analysis
based on high-level strategic abstraction, as well as
low-level implementation details. Our design of agent
strategy (high level) had simulation-based game theo-
retic analysis at its core. To understand this analysis,
however, we must first weave together some low-level
details, as well as abstraction steps that were under-
gone before the corresponding game theoretic prob-
lem was appropriately defined.
First, we made a grand simplification in agent de-
sign by focusing almost exclusively on bidding strat-
egy. As such, our budget was left always entirely un-
constrained. Furthermore, we fixed the ad selection
policy before any strategic analysis of bidding, hope-
ful that the specific ad choice has relatively low payoff
impact (we revisit this assumption below).
4.1 Ad Selection
We choose a generic ad for a F0 keyword and a
targeted ad for all others. For a F1 keyword, we
choose the product in the ad to match the manufac-
turer/component in the keyword, while the missing
product element of the keyword is filled with the
advertiser’s specialty. The ad for the F2 keyword
matches the product in the keyword.
4.2 Bidding Policy
The problem of developing an effective bidding strat-
egy in keyword auctions has received much attention
in the literature, but there is relatively little practi-
cal evidence of efficacy of any of the proposed tech-
niques. TAC/AA gives us an arguably objective,
highly complex, yet still stylized forum to test bid-
ding strategy development.
Perhaps the most natural approach to bidding in
a complex multiagent setting like TAC/AA is via a
combination of optimization and machine learning.
Indeed, machine learning has enjoyed considerable
success in TAC games historically (see, for example,
A GAME THEORETIC BIDDING AGENT FOR THE AD AUCTION GAME
37

(Pardoe and Stone, 2006)). Additionally, (Kitts and
Leblanc, 2004) suggested computing a myopic (one-
shot) profit maximizing bid given learned regression
models of expected position and payment per click.
One problem with learning-based approaches is that
they do not prescribe what should be done in the ab-
sence of any information about the adversaries. Ad-
ditionally, they assume that adversary behavior is sta-
tionary and, thus, past behavior is a good predictor
of future behavior. In fact, learning may take some
time before its prescriptions are effective, and the
opponents will often be learning themselves, creat-
ing complex interactions between the learning algo-
rithms, with policies that are unlikely to be stationary.
We steer away from learning-based approaches
entirely, with our bidding policy determined by a
simulation-based equilibrium estimate. We do so not
to suggest that learning is a lost cause; rather, we fol-
low a precise research agenda: developing an agent
that plays an equilibrium strategy alone allows us to
directly measure the efficacy of a pure game theo-
retic approach. Success of our approach will, thus,
make a good case for equilibrium as initial prediction
and strategic prescription, while further online explo-
ration may or may not lead an agent to play other,
more promising strategies.
In order to apply simulation-based game theoretic
techniques to bidding, we need to first abstract the
complex environment of TAC/AA into a computation-
ally tractable restricted bidding strategy class. To this
end, we make a dramatic simplification in considering
bidding strategies which are linear in an estimate of
an advertiser’s value per click v, i.e., b(v) = αv. The
motivation for such a restriction comes from the lit-
erature on the theory of one-item auctions (Krishna,
2002), which often exhibits equilibria that are lin-
ear in bidder valuations, as well as other game the-
oretic treatments of far simpler models of keyword
auctions (Vorobeychik, 2009). Note that this bidding
function is entirely myopic, as it contains no tempo-
ral dependence (or any other state information about
the game that may be available). On the other hand,
it is very simple to implement and highly intuitive: an
agent is asked to determine what fraction of his value
he wishes to bid. Indeed, particularly due to the simi-
larity of the GSP price mechanism to Vickrey auction,
a very natural strategy would be to bid one’s value,
setting α = 1. As we demonstrate below, this “truth-
ful bidding” turns out to be a very poor strategy in our
context.
While we have now a concrete class of bidding
strategies to focus on, we have yet another question
to answer before we can proceed to the actual analy-
sis stage: as value per click is not directly given, how
do we derive it from the TAC/AA specification and/or
game experience? We devote the next section to this
question.
4.3 Estimating Value per Click
A value per click of an advertiser a for a keyword q is
the expected revenue from a click,
v
a
= Pr{conversion|click}E[R
a
q
|conversion].
Revenue from a conversion depends entirely on
whether the manufacturer in the keyword (user pref-
erence) matches the advertiser’s specialty. If the man-
ufacturer is specified in the keyword, the revenue is
$15 if it matches the specialty and $10 otherwise. If
not, the expected revenue is 15 ×
1
3
+ 10 ×
2
3
=
35
3
, as
there is a 1/3 chance of a specialty match.
To compute the conversion probability, we need to
estimate two things: the proportion of focused shop-
pers and the (expected) value of I
d
. We begin with
the former, assuming that an estimate of I
d
is avail-
able. Since the proportion of focused shoppers ac-
tually depends on agent policies, we obtain an ini-
tial estimate using an arbitrary fixed policy, use the
result to estimate bidding equilibria, and then refine
the estimate using equilibrium bidding policies.
3
If
we fix agent policies, the proportion of focused shop-
pers on a given day for a keyword q can be com-
puted as the ratio of the empirical fraction of clicks
that result in purchases and the estimate of conver-
sion probability of a focused shopper. We average
such empirical proportions for every simulation day
over 100-130 simulations to obtain a daily estimate
of expected proportion of focused shoppers for each
keyword. We further average the resulting empirical
proportions of focused shoppers over keyword classes
(that is, over 6 F1 keywords in one case and over
9 F2 keywords in another). Thus, we have in the
end empirical proportions of focused shoppers for the
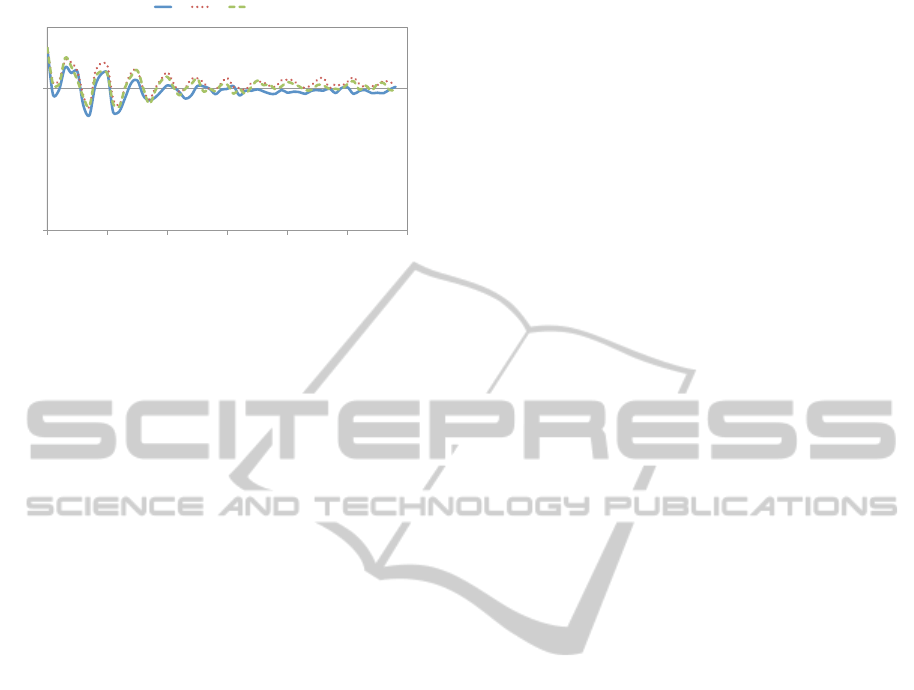
three classes of keywords, shown in Figure 2. Two
features of this plot are worthy of note. First, the
proportions are essentially the same for all keyword
classes. This is not very surprising: there isn’t a
very strong a priori reason to believe that they would
of necessity be different. Second, proportions fol-
low a damped harmonic oscillation pattern. These
oscillations are caused by the nonstationarity in the
state transition process: a higher proportion of fo-
cused shoppers yield a higher conversion probability
and, therefore, more sales, which result in the drop
of conversion probability due to exhausted capacity
3
In practice, it turned out that our estimates of focused
shopper proportions were not very sensitive to the specifics
of a bidding policy in our linear strategy space.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
38
!"
!#$"
!" %!" &!" '!" (!" )!" *!"
!"#$#"%#&'(#)*+,-'./#$$,"+'
012'
+!"
+%"
+&"
Figure 2: User proportions in the focused shopping state.
and also a drop in the fraction of focused shoppers.
When the conversion probabilities are low, however,
few transactions occur, increasing the proportion of
focused shoppers. Interestingly, this process reaches
a near steady-state at around the midway point of a
game.
Suppose that we are estimating value per click on
day d for tomorrow (day d + 1). In order to com-
pute the value of I
d+1
, we need sales information for
the three days that precede day d, as well as total
sales for day d. Additionally, the value of I
d+1
(and,
hence, value per click) is not actually fixed but will
change with every additional sale on day d + 1. On
day d we have exact information about sales on d − 1,
d − 2, and d −3 based on advertiser sales reports that
are provided at the beginning of each simulated day.
Furthermore, we can estimate the expected sales on
day d as the product of CTR, today’s conversion rate,
and the total number of impressions. While we know
none of these exactly, we can estimate each with rea-
sonable accuracy. First, we crudely estimate CTR as
the average observed CTR throughout the game. To-
day’s conversion rate requires estimating I
d
, for which
we have data from all days except current. We ob-
tain a conservative (high) estimate for today’s conver-
sion rate by only using those “known” sales in com-
puting I
d
(which in the end underestimates value per
click for d + 1). The total number of impressions for
each day of every keyword is estimated by running
100-130 simulations offline and averaging the number
of observed impressions, using a fixed agent policy
vector, just as in estimating focused shopper propor-
tions. Next, we project total sales on day d + 1 using
again a conservative estimate of the conversion rate
that would be effective at the beginning of that day.
Finally, since value is roughly linear in I
d+1
, we com-
pute average I
d+1
over each incremental sale made on
day d + 1.
5 SIMULATION-BASED GAME
THEORETIC ANALYSIS
5.1 Equilibrium and Best Response
Analysis
Having restricted our bidding strategies to be of the
form b(v) = αv, we use simulation-based game theo-
retic analysis to estimate an equilibrium in this strat-
egy space. We note that an equilibrium estimated in
the analysis actually plays a dual role, one predictive,
describing what other agents will do, and one pre-
scriptive, telling us how to optimally respond to that
prediction.
In order to operationalize an equilibrium solution
in the prescriptive context, we make a substantial fur-
ther restriction and focus only on symmetric strategy
profiles, that is, restrict all agents to follow the same
bidding strategy b(v). Hence, we use α to refer both
to a specific bidding strategy and to a symmetric pro-
file of these. There are two key reasons for restrict-
ing attention to symmetric profiles. First, an asym-
metric equilibrium is difficult to operationalize, since
it is not clear (when agents are ex-ante symmetric)
which role our agent should play. Second, even if we
pick a role for our agent, we still must assume that
others coordinate on their respective roles just as we
predict (at the minimum, no other agent may chooses
our agent’s role). Furthermore, we do not necessar-
ily lose much by the restriction from the descriptive
standpoint, since the agent ultimate cares about other
players’ choices only in the aggregate, insofar as they
impact CTR and payments, and it seems reasonable
that this is sufficiently captured by a symmetric equi-
librium profile.
Since bids should be strictly positive to ensure
any profit and, myopically, there is no reason to bid
above value per click, we restrict α to the (0,1] in-
terval. Furthermore, to enable a more detailed analy-
sis, we limit our equilibrium search to a discrete grid
{0.1,0.2,...,1} (we also performed analysis “be-
tween” some of these grid points, but found that we
do not lose very much due to our particular choice of
discretization).
One major hurdle in equilibrium-based agent de-
sign is the issue of equilibrium selection. Since in
our case equilibrium would offer both a prediction of
opponent play and a best response to it, the goal, if
we are to choose an equilibrium, is to choose one that
yields the most plausible such prediction.
A common and highly effective technique em-
ployed in designing computational agents to compete
against others is self-play (for example, Tesauro’s
A GAME THEORETIC BIDDING AGENT FOR THE AD AUCTION GAME
39

!"#$
!"%$
!"&$
!"'$
!"($
!")$
!"*$
!"+$
!",$
#$
!"#$ !"%$ !"&$ !"'$ !"($ !")$ !"*$ !"+$ !",$ #$
!"#$%&"#'()#"%
*+,,"$-./%0-(12"%3#4%
!"
#!!!"
$!!!!"
$#!!!"
%!!!!"
%#!!!"
&!!!!"
&#!!!"
'!!!!"
'#!!!"
#!!!!"
!($" !(%" !(&" !('" !(#" !()" !(*" !(+" !(," $"
!"#$%&'$()$*+%,$-)$.%
/0##$.)1+%/.)".$-0%2)(34$%
Figure 3: Best response function (left) and game theoretic regret (right) for all symmetric strategy profiles on the grid.
TD-Gammon agent was developed in such a
way (Tesauro, 1995)). While this approach is usually
applied at the level of individual game decisions when
opponents move sequentially, we can detect a rough
correspondence between self-play and a well-known
iterative best response dynamic, where a player com-
putes a maximizing action in each iteration assum-
ing stationary opponents. In our case, iterative best
response would proceed by first selecting a starting
(seed) symmetric profile α
0
, approximating a single-
agent best response strategy
ˆ
α
0
to it, then setting the
symmetric profile in the next iteration to be α
1
=
ˆ
α
0
.
If this process converges and best responses are truly
optimal, it necessarily converges to a Nash equilib-
rium α
∗
. The fact that the process can be viewed as
roughly analogous to self-play suggests that equilib-
ria found in such a manner may have good predictive
properties, at least regarding the most competent of
opponents. However, the dynamic itself is not suffi-
cient: even if we believe other agents to follow a sim-
ilar process, all need to agree on a starting point α
0
.
The choice of a starting point would, in general, be in-
formed by whatever conventions govern typical algo-
rithmic design in specific domains. In the context of
auctions with one-dimensional valuations (such as our
case), a rather focal starting point is truthful bidding,
particularly so since GSP is reminiscent of Vickrey
auctions which are, in fact, truthful. Hence, setting
α
0
= 1 seems a very reasonable way to seed a best
response dynamic in a way that would lead to good
predictions.
Following this approach, we obtained the equilib-
rium strategy for the purposes of the tournament via
several iterations of best response dynamics starting
at α = 1. A look at Figure 3 (left) shows that a best
response to a symmetric strategy profile with α = 1
is α = 0.4, and a best response to a symmetric pro-
file with α = 0.4 is α = 0.2, which happens to be a
symmetric equilibrium in our restricted policy space.
Consequently, we were able to obtain a symmetric
equilibrium for the restricted discrete bidding strategy
space after only two best response iterations.
Based on the rapid convergence of iterative best
response in our setting, we can make another con-
jecture: the equilibrium that we thus locate is rela-
tively robust in the sense that the equilibrium strategy
is a best response (or nearly so) for a number of other
opponent strategies besides equilibrium. We suggest
that this is another positive side-effect of considering
best response dynamics in some settings. Another ex-
ample of this phenomenon is a first-price sealed-bid
auction with private valuations uniformly distributed
on a unit interval, where the best response to truthful
bidding in the linear strategy space is also a symmet-
ric equilibrium strategy.
4
Figure 3 (left) demonstrates
this robustness in our case: α = 0.2 is a best response
to 0.2, 0.3, and 0.4. Indeed, this figure additionally
reveals another equilibrium at α = 0.1, but it is only a
best response to itself.
After the tournament we ran additional simula-
tions to paint a more complete picture of the best re-
sponse function in our discrete strategy space, which
is depicted in Figure 3 (left), with payoffs for any
configuration of agent strategies computed based on
15-30 simulation runs.
5
Several items are noteworthy
from Figure 3. First, we may note that none of α > 0.4
are ever a best response. This does not necessarily
imply that these are poor strategies to play: it may
be that an agent gains little by deviating from such
a strategy, if all others jointly also play it. The cor-
responding measure of strategic stability, game the-
oretic regret, evaluates, for any strategy profile α the
amount of gain an agent can obtain by unilaterally de-
viating when all others play the prescribed symmetric
4
Of course, we make no general claims here, just offer
some empirically motivated intuition and conjecture.
5
The total number of runs we could execute was lim-
ited due to our experimental environment and the non-trivial
running time of each simulation.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
40

!"
#!!!!"
$!!!!"
%!!!!"
&!!!!"
'!!!!"
(!!!!"
)!!!!"
*!!!!"
!+#" !+$" !+%" !+&" !+'" !+(" !+)" !+*" !+," #"
!"#$%&'(&)
$
*)(")&'+
$
!"
#!!!!"
$!!!!"
%!!!!"
&!!!!"
'!!!!"
(!!!!"
)!!!!"
*!!!!"
!+#" !+$" !+%" !+&" !+'" !+(" !+)" !+*" !+," #"
!"#$%&'(&)$%&*)(+,)&-$).$/0123$0143$0153$0167
$
8)(")&'9
$
Figure 4: Max regret of each strategy on the grid against all strategies (left) and against a limited subset of “reasonable”
opponents (right).
strategy:
ε(α) = max
α
0
∈[0,1]
u(α
0
,α
−1
) − u(α),
where u() is the symmetric utility function of each
bidder (in our case, we estimate it by running simula-
tions) and α
−1
indicates that all players besides bidder
1 play the prescribed α, while α
0
denotes a deviation
by bidder 1 (we pick bidder 1 arbitrarily here since
every bidder is equivalent in this context by symme-
try). Figure 3 (right) plots game theoretic regret of
all symmetric strategy profiles in our discrete strategy
space. This figure further, and rather soundly, con-
firms that any α > 0.4 makes a very poor strategic
choice, one unlikely to be adopted by even somewhat
competent opponents. This observation alone already
dramatically restricts our consideration set, and one
may well use such knowledge derived from a game
theoretic analysis to proceed with a more traditional
machine learning approach. This is a rather important
and general point: game theoretic techniques may of-
ten be quite useful in restricting the number of options
one needs to consider in learning, resulting, perhaps,
in significant improvement in learning performance.
Another interesting observation is that the equilibrium
α = 0.2 is actually a best response to nearly every rea-
sonable strategy (i.e., α < 0.4, with α = 0.1 being the
lone exception) in our restricted space.
5.2 Robustness Analysis
We now turn to offer a methodology for a largely
prescriptive game theoretic analysis, which is partic-
ularly salient in practical agent design settings like
TAC/AA. This analysis is complementary to more tra-
ditional equilibrium analysis above, as it allows us
(among other things) to assess alternative equilibrium
strategies.
When deciding on a strategy for an agent in a mul-
tiagent system, an important consideration is robust-
ness to uncertainty about opponent decisions. A com-
mon way to measure robustness of a particular strat-
egy is via maximum regret, or the most that an agent
would have gained by switching to another strategy,
maximized over all opponent policies in a specific
consideration set. Figure 4 (left) shows max regret of
every strategy in response to our entire restricted con-
sideration set, while Figure 4 (right) plots max regret
when we restrict opponents to play only “reasonable”
strategies. We can observe that α = 0.2 fairs reason-
ably well in both cases; although α = 0.3 and α = 0.4
are more robust to very aggressive opponents (left), if
we assume that all opponents are reasonable, α = 0.2
has the smallest regret. In fact, good robustness prop-
erty of α = 0.3 in the unrestricted opponent setting
actually prompted us to use that strategy, rather than
0.2, in the semifinal rounds, due to the risk that some
of the agents competing at that stage are still rather
unpolished (a prediction that proved correct). In con-
trast, the α = 0.1 equilibrium has relatively poor re-
gret properties in both settings. The upshot of this dis-
cussion is that we can augment standard simulation-
based game theoretic analysis with an analysis of max
regret, as well as game theoretic regret, to allow us to
best balance the risks from poor opponent strategy as-
sessment with benefits of optimally responding to our
predictions in a given setting.
6 SOME ENHANCEMENTS
Our discussion above centered around an assumption
that the same bidding policy (parametrized by α) is
used for any keyword. If we use a state abstraction
that captures all relevant strategic aspects of the envi-
ronment, then there is no loss in utilizing a single bid-
ding policy for all keywords. However, as we focus on
policies that only use a myopic value per click, a rela-
tively simple way to compensate for our restriction is
A GAME THEORETIC BIDDING AGENT FOR THE AD AUCTION GAME
41
to use different policies for different keyword classes.
Thus, we may wish to use a bidding strategy that is
a vector < α
F0
,α
F1
,α
F2
>, where each component
prescribes the bidding strategy for the corresponding
keyword. Another natural generalization is to con-
template quadratic bid functions. We implement the
extension to quadratic bidding policies by specifying
a value of α
low
to use when I
d
= 0 (and, hence, v = 0),
and take the specified α (as above) to be applicable
when I
d
= 1 (value is maximal), with the restriction
that α
low
≥ α; the actual strategy is then a linear inter-
polation between these two extremes. This allows us
to add only a single parameter, even while allowing
different α for different keywords. The intuition for
our special restricted class of quadratic bidding func-
tions is that a higher fraction of value is submitted
as a bid when value is low. This is motivated by the
equilibrium structure of multiunit auctions (Krishna,
2002).
The equilibrium analysis that we had performed
above had used a one-dimensional strategy space, and
so estimating a best response did not require very
much computation. By considering, instead, a four-
dimensional strategy space, we make the problem of
exhaustive sampling of the entire strategy space in-
tractable due to the considerable simulation time re-
quired by each ad auction game. As a result, we
can no longer implement iterative best response pre-
cisely as would be prescribed in an ideal setting.
Rather, we simplify search the process by iterating
one-dimensional best response dynamics sequentially
over strategic parameters. Specifically, we proceed as
follows. First, we ignore the strategy space extension
and estimate an equilibrium in the one-dimensional
strategy space as described above. This gives us α
∗
.
We thereby set α
F0
= α
F1
= α
F2
= α
low
= α
∗
and pro-
ceed to sequentially explore individual strategic pa-
rameters, starting with α
low
. More formally and gen-
erally, let s = {s
1
,...,s
L
} be a strategy factored into L
parameters and suppose that s is initialized to s
0
. We
suggest the following algorithm for approximating an
equilibrium in this factored strategy space:
1. Fix s
l
= s
0
, and perform best response dynamics
only allowing s
1
to vary. Assume that best re-
sponse dynamics converges (if not, we can termi-
nate it after a finite number of iterations and select
an equilibrium approximation based on some cri-
terion from all the explored candidates) to s
1
= s
∗
1
.
This gives us a new s = {s
∗
1
,s
0
,...,s
0
}
2. Fix all strategic features at these values except s
2
,
and vary s
2
in another sequence of best response
iterations
3. Repeat step 2 sequentially for all strategic param-
eters.
When we have completed the procedure above for
all strategic parameters, we thereby have obtained
s
∗
= {s
∗
1
,...,s
∗
L
}. Note that s
∗
is not guaranteed to
be an equilibrium, since we only vary a single strate-
gic parameter at a time. Validating that such a proce-
dure actually yields good equilibrium approximation
is a subject of future work; for now, suffice it to say
that its performance was quite satisfactory in the ac-
tual tournament, where we used < 0.1,0.2,0.2 > and
α
low
= 0.3, all obtained in this fashion.
7 ALTERNATIVE AD SELECTION
POLICIES
Having assumed until now that our choice of ad pol-
icy is reasonable (and, moreover, that a specific ad
policy has relatively little profit impact), we consider
two simple alternative ad selection policies. The first,
Generic Ad Selection, always chooses a generic ad.
The second, Specialty Ad Selection, always chooses
the ad to match the product to the advertiser’s manu-
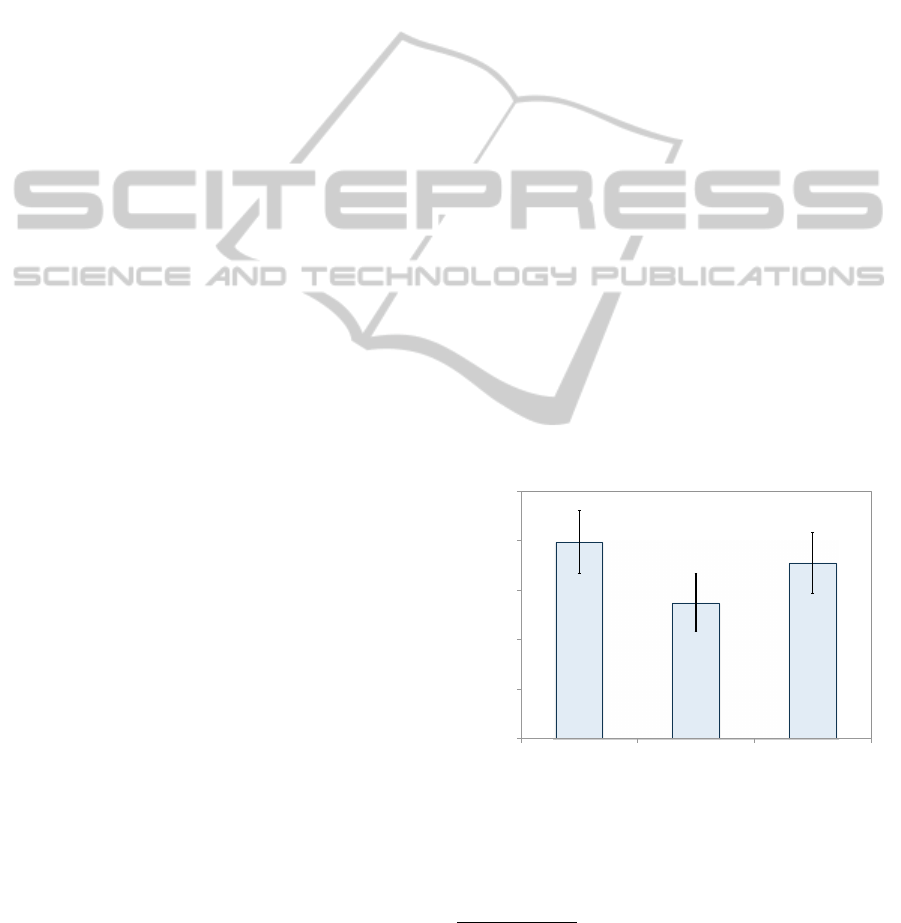
facturer and component specialty. Figure 5 shows that
we were incorrect on one account: ad selection does
make a significant impact on profits. Fortunately, the
policy we actually used proved sensible, as it is signif-
icantly better than generic at the 0.9 confidence level
and empirically (though not statistically significantly)
better than the specialty ad selection policy.
6
!""""#
!$"""#
%""""#
%$"""#
&""""#
&$"""#
!"#$%&'$( )$'$*&+( ,-$+&"%./(
01$*"2$(3*45.(
Figure 5: Payoffs of three ad policies (baseline is the one
actually used in tournament). Error bars are confidence in-
tervals at the 0.9 level.
6
Indeed, since we evaluated the selection policies for an
agent by fixing the policies of others to be our “baseline”
described above, the baseline policy is shown to be an ap-
proximate equilibrium if we restrict the ad policy space to
only these three options.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
42

8 PREDICTIVE VALUE
OF EQUILIBRIUM:
EVIDENCE FROM
TOURNAMENT
We close our discussion with some evidence about
the descriptive quality of our approximate equilib-
rium policies from the TAC/AA tournament. In an
ad auction, key determinants of an agent’s profits are
the distributions of CTRs and payments per click as
functions of submitted bids. We use the data from
tournament qualifying rounds, semifinals, and finals
to see whether these distributions appear to converge
to equilibrium predictions. We evaluate the error of
an equilibrium prediction with respect to the tourna-
ment evidence about the distribution of some measure
(say, payments per click) as follows. First, we bin all
bids from simulated equilibrium and tournament ex-
perience of our agent into 50 intervals. For each bid
interval, we compute the maximum error between the
tournament and equilibrium distributions of the mea-
sure of interest (essentially, we use the Kolmogorov-
Smirnov test statistic), and then compute the weighted
average error over all bid intervals, with weights cor-
responding to the number of bids that fall into each
interval.
!"
!#$"
!#%"
!#&"
!#'"
!#("
!"# !$%# !$&# !'#
)*+,-" ./01-" 213+,-"
Figure 6: Average distance between equilibrium and real-
ized (tournament) click-though-rate distributions.
The results, shown in Figures 6 and 7, show a
clear downward trend in error as the tournament pro-
gresses: as agents become more competent on aver-
age, equilibrium prediction becomes increasingly ac-
curate. At the minimum, this suggests that using equi-
librium predictions as initial policies in the absence of
other information can be quite effective.
7
A similar, and much rosier picture for equilibrium
7
On the other hand, final errors are still non-trivial, so
augmenting this approach with learning seems quite desir-
able.
!"
!#$"
!#%"
!#&"
!#'"
!#("
!"# !$%# !$&# !'#
)*+,-" ./01-" 213+,-"
Figure 7: Average distance between equilibrium and real-
ized (tournament) payment per click distributions.
prediction, is shown in Figure 8, where we look at
average realized values of α observed in the tourna-
ment: there is a clear downward trend as tournament
progresses, and the strategies in the final rounds are
extremely close to equilibrium predictions.
8
We also
note that average profits exhibit a similar trend, start-
ing rather low (high α) and growing to near the levels
predicted by the symmetric equilibrium at α = 0.2 as
the tournament progresses. This reveals, indirectly,
that as agent pool becomes more competent, submit-
ted bids are lower (on average), allowing bidders to
realize higher profits.
!"
!#$"
!#%"
!#&"
!#'"
("
!"#$%& '()*%& +*,#$%& -."*$*/0*")&
12(0#3(&!
"
Figure 8: Average α values used by bidders throughout the
tournament.
9 CONCLUSIONS
We demonstrate in concrete terms how to operational-
ize a pure game theoretic bidding strategy in a com-
plex simulated keyword auction game, combining
equilibrium analysis (which offers a combination of
8
Of course, these aren’t actual policies used, just our
abstraction of them into the linear strategy space.
A GAME THEORETIC BIDDING AGENT FOR THE AD AUCTION GAME
43

descriptive and prescriptive insights) with a purely
prescriptive analysis based on robustness. All the
analysis is done using simulations, as compared to
more traditional game-theoretic analyses which usu-
ally involve mathematical treatments. Furthermore, in
spite of the approximate nature of the resulting equi-
libria, we find that they offer very valuable predic-
tions about the actual ad auction tournament bidding
(as captured by submitted bids, as well as observed
distribution of CTRs and prices). Finally, we offer an
algorithm for equilibrium approximation when strate-
gies are multi-dimensional, based on a sequence of
single-dimensional analyses. In the process, we of-
fer numerous general insights about operationalizing
game theoretic approaches in practical agent design
in multiagent systems.
REFERENCES
Jordan, P. R. and Wellman, M. P. (2009). Designing the
ad auctions game for the trading agent competition.
In IJCAI-09 Workshop on Trading Agent Design and
Analysis.
Kitts, B. and Leblanc, B. (2004). Optimal bidding on key-
word auctions. Electronic Markets, 14(3):186–201.
Krishna, V. (2002). Auction Theory. Academic Press.
Lahaie, S. and Pennock, D. M. (2008). Revenue analy-
sis of a family of ranking rules for keyword auctions.
In Eighth ACM Conference on Electronic Commerce,
pages 50–56.
Pardoe, D. and Stone, P. (2006). Tactex-05: A cham-
pion supply chain management agent. In Twenty-First
National Conference on Artificial Intelligence, pages
1489–1494.
Tesauro, G. (1995). Temporal difference learning and td-
gammon. Communications of the ACM, 38(3):58–68.
Vorobeychik, Y. (2009). Simulation-based game theoretic
analysis of keyword auctions with low-dimensional
bidding strategies. In Twenty-Fifth Conference on Un-
certainty in Articial Intelligence.
Wellman, M. P., Reeves, D. M., Lochner, K. M., and Suri,
R. (2006). Searching for walverine-05. In Agent-
Mediated Electronic Commerce: Designing Trading
Agents and Mechanisms, LNAI 3937, pages 157–170.
Springer-Verlag.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
44
