
INFLUENCE OF NEIGHBORHOOD AND SELF
REORGANIZATION IN NETWORKED AGENTS
Udara C. Weerakoon and Vicki H. Allan
Utah State University, Logan, UT, U.S.A.
Keywords: Multi-agent system, Reorganization, Simulation, Coalition, Hedging environment.
Abstract: In a network graph in which nodes represent agents and edges represent "can work with" relationships,
coalitions form. Such coalitions satisfy the skill set requirements of a task while still obeying partner
requirements. Agents composing a coalition must form a connected subgraph in the network graph. There is
no centralized control, and agents are free to propose any coalition that satisfies both the skill set and partner
requirements. In this research, strengths of various coalition formation strategies are compared with respect
to both success and profit. To determine the quality of the solution and for comparison purposes, we
temporarily remove the restriction that an agent can belong to a single proposed coalition and that a task can
be proposed by a single coalition (i.e. hedging environment). In addition, agents are given the ability to
dynamically reorganize their partner connections in an attempt to improve utility. Agents employing
egalitarian, intelligent and inventory reorganization are compared with agents employing structural and
performance reorganization.
1 INTRODUCTION
We model the coalition formation problem as a
network graph in which nodes represent agents and
edges represent a "can work with" relationship. Each
agent possesses a single primary skill. Tasks require
a set of skills that must be present in the coalition for
the duration of task execution. Coalitions are
restricted to sets of agents linked via edges.
Reorganization is viewed as the mechanism
enabling individual agents to change their
connections dynamically without explicit external
commands (Marzo Serugendo et al., 2005). This
behavior can be generated in multi-agent systems in
several ways (Barton and Allan, 2008; Gaston and
Jardins, 2005; Thadakamalla et al., 2004). This
paper performs a comparative analysis of various
strategies of task selection and coalition formation.
Some strategies introduce specialist agents to the
organization (Hoogendoorn, 2007) to manage each
agent’s connections. Yet other methods, such as
organizational self-design (Kamboj, 2009), achieve
reorganization by dynamic spawning and merging
agents. In our model, we use autonomous agents to
improve and analyze reorganization.
2 RELATED WORK
In Abdallah and Lesser's work (Abdallah and Lesser,
2007), agents organize themselves in an overlay
network in which agents only interact with
neighbors. Similarly, in our method, agents
reorganize. However, Abdallah and Lesser restrict
their problem to that of task allocation (assigning
one agent to do a task) rather than coalition
formation. Gaston and Jardins (Gaston and Jardins,
2005) consider social networks and task formation
with multiple skills per task, but do not have varying
agent types.
In Barton and Allan's work (Barton and Allan,
2008), self-organized social networks under
changing resource requirements are considered.
Edges in the social network can be modified by
either adjacent agent. Such modification is termed
rewiring. However, the results lay at a low range of
efficiency and performance, typically less than 45%.
In our research, we extend these results by showing
that the efficiency/performance is often dictated by
the maximum connections each agent maintains.
376
Weerakoon U. and Allan V..
INFLUENCE OF NEIGHBORHOOD AND SELF REORGANIZATION IN NETWORKED AGENTS.
DOI: 10.5220/0003140703760379
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 376-379
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)
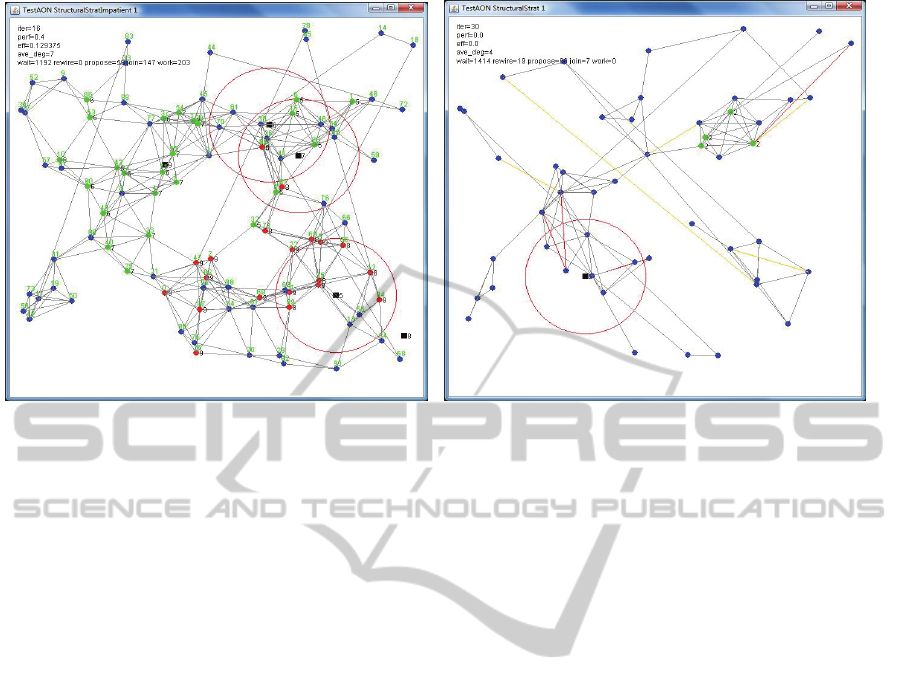
a) b)
Figure 1: Networked agent simulation: a graphical representation of the networked multi-agent system. Each node
represents an agent while an edge represents a relationship which indicates “can work with”. Nodes in blue are
uncommitted agents which are available to form a coalition or reorganize themselves in a better neighborhood. Nodes in red
are committed agents which are executing a task in a coalition (a). Nodes in green are committed agents in a partially
formed coalition for a given task. Edges in red are newly created relationships as a result of reorganization (b). Shaded
edges represent an abandoned edge due to reorganization.
3 SIMULATION
In this research, our goal is to determine strategies
which improve the success of a distributed coalition
formation network. Tasks have equal utility and are
generated at regular intervals during the simulation.
We define success-rate of an agent as the
fraction of successfully completed coalitions divided
by the total number of coalitions joined.
In our model, agents first consider joining
coalitions to which their neighbors belong (partner
requirement). Here, neighbor means a node
connected to an agent by an edge.
The state of an agent, based on the coalition
perspective, is as follows:
active - executing a current task
committed - has joined a coalition that has not
begun execution
uncommitted - agent which can propose a new
coalition or join a coalition proposed by a neighbor
The set of agents that an agent can see in
following paths of a predefined length is termed
communication depth.
4 AGENT TYPES
4.1 Random Agents
Random agents are a primitive type of agent that
join coalitions (if possible) and otherwise propose.
No specific criterion is used to select the task to
join/propose.
4.2 Strategic Agents
Strategic agents select the coalition to join based on
a blend of (1) the coalition with the highest percent
of committed agents and (2) the coalition for which
peers (i.e. neighbors of neighbors) have the best
match with skills needed for the coalition. If the
agent is not satisfied with choices for joining a
coalition, the strategic agent can then propose a new
coalition, selected based on whether its peers have a
sufficiently high chance of satisfying the necessary
criteria. As a last resort, the strategic agent can
randomly propose a coalition.
5 REORGANIZATION
An agent has the ability to remove an edge between
INFLUENCE OF NEIGHBORHOOD AND SELF REORGANIZATION IN NETWORKED AGENTS
377
it and its neighbor and create a new edge with an
agent that is not a current neighbor. This is termed
reorganization. We study five types of
reorganization: performance reorganization
(Gaston and Jardins, 2005), structural
reorganization (Thadakamalla et al., 2004),
egalitarian reorganization, inventory
reorganization, and intelligent reorganization.
Table 1 summarizes the parameters of each
reorganization type in the connected agent network.
Table 1: Summary of each reorganization strategy.
Reorg. Trigger How Selected Can
refuse
Performance prob 1/|A| performance no
Structural prob 1/|A| most connections no
Egalitarian prob 1/|A| fewest
connections
no
Inventory prob 1/|A| needed skill no
Intelligent poor perfor-
mance
current skill
demand
yes
6 ENVIRONMENT
6.1 Hedging Environment
In our model, we compare the effects of allowing
agents to commit to multiple coalitions (that are not
yet executing), and we allow multiple possible
coalitions to be associated with the same task. The
tradeoff in this environment is the balance between a
higher number of successful coalitions and the cost
of discarding unsuccessful coalitions.
7 EMPIRICAL EVALUATION
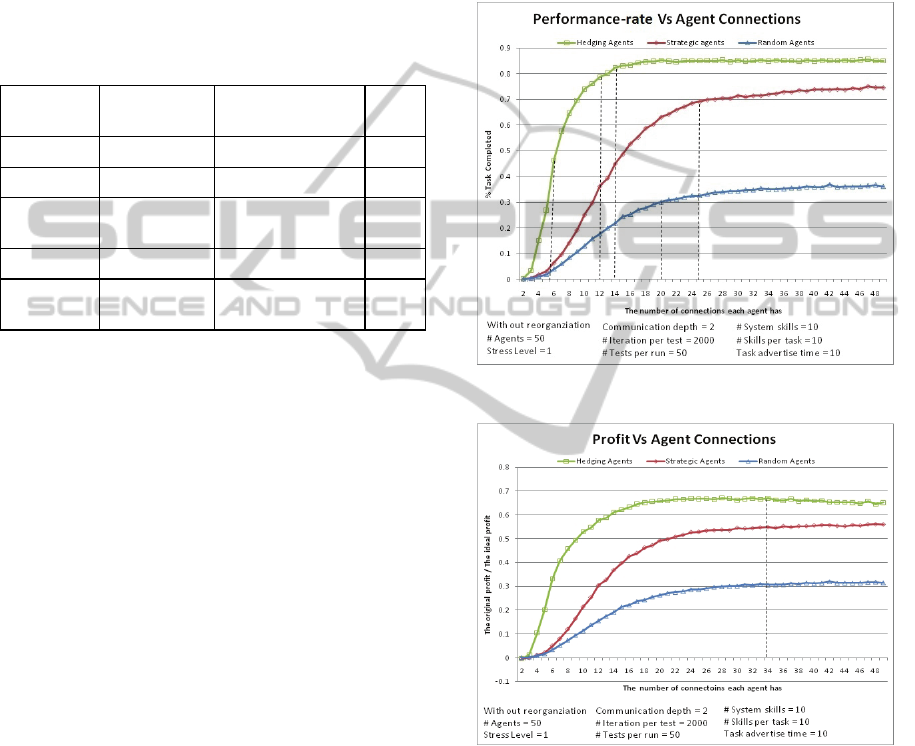
In our first set of experiments (Figures 2-3), each
random, strategic or hedging agent is connected with
the same number of neighbors (number of
connections). No reorganization is done here. In our
second set of experiments (Figures 4-5), the
behavior of hedging agents employing five different
reorganizations are analyzed.
Consider Figure 2. We use the term saturation
point to indicate the point at which an agent achieves
a .9 (90%) performance-rate (in the tests). In the
hedging environment, agents reach the saturation
point at 10 connections. Strategic agents require 18
connections to achieve their saturation point.
Random agents require 20 connections to achieve
their saturation point.
Figure 3 shows the corresponding profit earned
by each agent simulation. Interestingly, in the
hedging environment, the profit degrades from its
maximum value when the number of connections is
more than 34, due to the higher communication cost
and insignificant improvement in reward.
Figure 2: Performance-rate Vs Agent Connections.
Figure 3: Profit Vs Agent Connections.
Agents employing reorganization give us the
opportunity to understand the effects on the
performance-rate, and interestingly, the dilemma of
society, a tragedy of commons (Axelrod, 1997).
Figure 4 depicts the performance-rate of the
hedging environment with five types of
reorganization. Reorganization increases the
performance-rate even in the hedging environment.
It is of note that with hedging, egalitarian
outperforms the others. Agents employing
performance and inventory reorganizations diminish
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
378
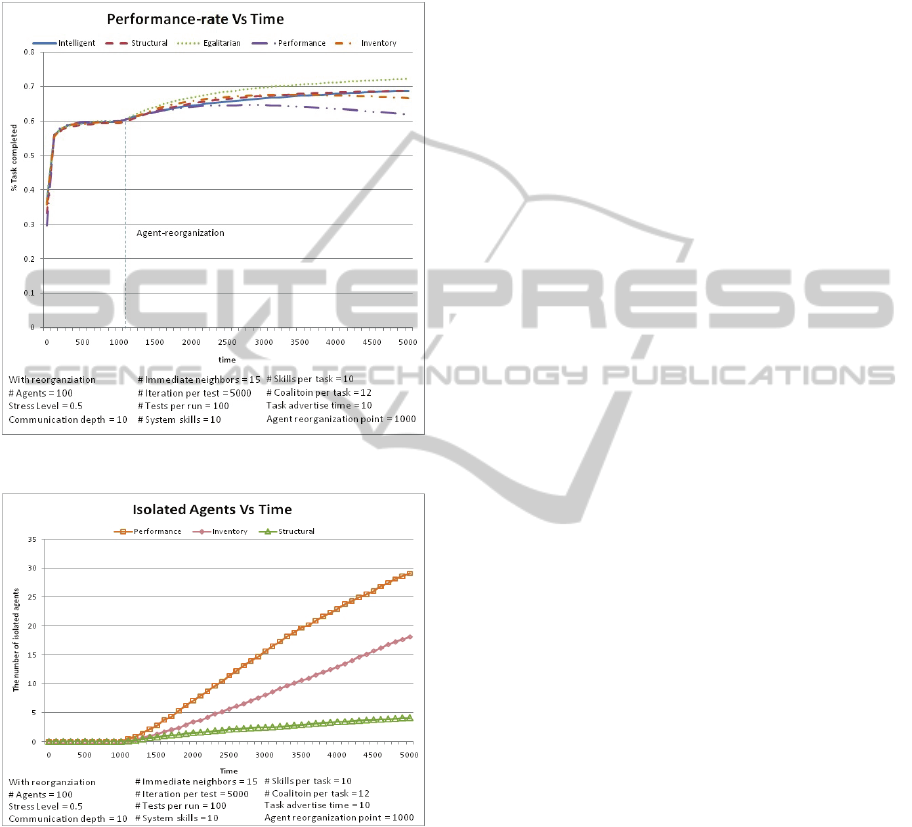
their maximum value at the time points of 2800 and
3500, due to the number of isolated agents (agents
without neighbors/connections).
Figure 5 depicts the number of isolated agents in
each agent simulation due to reorganization.
Figure 4: Performance-rate Vs Time (with reorganization).
Figure 5: Isolated Agents Vs Time (with reorganization).
8 CONCLUSIONS
Our research shows that strategic agents are
significantly better than random agents and, for a
high number of connections, are competitive with
the upper bound (hedging environment).
Success of local strategies (without hedging)
depends heavily on having sufficient neighbors. The
results show us that hedging agents are capable of
earning more profit than others as their increased
success negates the extra cost of discarding
unnecessary coalitions, and strategic agents are
competitive with them.
Agents employing egalitarian reorganization
outperform all other reorganizations. Performance
and inventory reorganization result in a high number
of isolated agents.
A better plan would be to have a mixture of
strategies: some which directly pursue goals and
others which seek to rebuild and utilize agents which
have been abandoned in the simulation.
ACKNOWLEDGEMENTS
This material is based in part upon work supported
by the National Science Foundation under grant
number 0812039
REFERENCES
Abdallah, S. and Lesser, V., 2007. Multiagent
reinforcement learning and self-organization in a
network of agents. In AAMAS (Autonomous agents
and multiagent systems). Honolulu, Hawaii.
Axelrod, R. 1997. Building New Political Actors. The
Complexity of Cooperation: Agent-based Models of
Competition and Collaboration. Princeton University
Press.
Barton, L. and Allan, V. H., 2008. Adapting to Changing
Resource Requirements for Coalition Formation in
Self-Organized Social Networks. In IAT (International
Conference on Intelligent Agent Technology). Sydney,
Australia, December 2008.
Gaston, M. E. and Jardins, M. Des, 2005. Agent-
Organized Networks for Dynamic Team Formation. In
AAMAS (Autonomous Agents and Multi-Agent
Systems). Utrecht, Netherlands, pp. 230-237.
Hoogendoorn, M., 2007. Adaptation of organizational
models for multi-agent systems based on max flow
networks. In IJCAI (International Joint Conference on
Artificial Intelligence), India, pp. 1321-1326.
Kamboj, S., 2009. Analyzing the tradeoffs between
breakup and cloning in the context of organizational
self-design. In AAMAS (Autonomous Agents and
Multi-Agent Systems). Hungary, pp. 829-836.
Marzo Serugendo, G. Di, Gleizes, M. P. and Karageorgos,
A., 2005. Self-organization in multi-agent systems.
The Knowledge Engineering Review, 20(2), pp. 165–
189.
Thadakamalla, H. P., Raghaven, U. N. K., and Albert, R.,
2004. Survivability of Multiagent-based Supply
Networks: A Topological Perspective. IEEE
Intelligent Systems, vol.19, pp. 24-31.
INFLUENCE OF NEIGHBORHOOD AND SELF REORGANIZATION IN NETWORKED AGENTS
379
