
SHARED UNDERSTANDING AND SYNCHRONY EMERGENCE
Synchrony as an Indice of the Exchange of Meaning between Dialog Partners
Ken Prepin and Catherine Pelachaud
LTCI/TSI, Telecom-ParisTech/CNRS, 37-39 rue Dareau, 75014, Paris, France
Keywords:
Synchrony, Shared understanding, Coupled oscillators, Dynamical systems, Inter-subjectivity.
Abstract:
Synchrony is claimed by psychology as a crucial parameter of any social interaction. In dialog interactions, the
synchrony between non-verbal behaviours of interactants is claimed to account for the quality of the interac-
tion: to give to human a feeling of natural interaction, an agent must be able to synchronise on appropriate time.
The synchronisation occurring during non-verbal iteractions has recently been modelised as a phenonomenon
emerging from the coupling between interactants. We propose here, and test in simulation, a dynamical model
of verbal communication which links the emergence of synchrony between non-verbal behaviours to the level
of meaning exchanged through words by interactants: if partners of a dyad understand each other, synchrony
emerges, whereas if they do not understand, synchrony is disrupted. In addition to retrieve the fact that syn-
chrony emergence within a dyad of agents depends on their level of shared understanding, our tests pointed
two noteworthy properties of synchronisation phenomenons: first, as well as synchrony accounts for mutual
understanding and good interaction, di-synchrony accounts for misunderstanding; second, synchronisation
and di-synchronisation emerging from mutual understanding are very quick phenomenons.
1 INTRODUCTION
When we design agents capable of being involved in
verbal exchange, with humans or with other agents,
it is clear that the interaction cannot be reduced to
speech. When an interaction takes place between two
partners, it comes with many non-verbal behaviours
that are often described by their type such as smiles,
gaze at the other, speech pauses, head nod, head
shake, raise eyebrows, mimicry of posture and so on
(Kendon, 1990; Yngve, 1970). But another aspect of
these non-verbal behaviours is their timing according
to the partner’s behaviours.
In 1966, Condon and Ogston’s annotations of interac-
tions have suggested that there are temporal correla-
tions between the behaviours of two person engaged
in a discussion (Condon and Ogston, 1966): micro
analysis of discussion videotaped conduces Condon
to define in 1976 the notions of auto-synchrony (syn-
chrony between the different modalities of an individ-
ual) and hetero-synchrony (synchrony between part-
ners).
Since Condon et al.’s findings, synchronisationbe-
tween interactants has been investigated in both be-
havioural studies and cerebral activity studies. These
studies tend to show that when people interact to-
gether, their synchronisation is tightly linked to the
quality of their communication: they synchronise if
they managed to exchange and share information;
synchronisation is directly linked to their friendship,
affiliation and mutual satisfaction of expectations.
In developmental psychology, generations of pro-
tocols have been created, from the “still face” (Tron-
ick et al., 1978) to the “double video” (Murray
and Trevarthen, 1985; Nadel and Tremblay-Leveau,
1999), in order to stress the crucial role of synchroni-
sation during mother-infant interactions.
Behavioural and cerebral imaging studies show
that oblivious synchrony and mimics of facial expres-
sions (Chammat et al., 2010; Dubal et al., 2010) are
involved in the emergence of a shared emotion as in
emotion contagion (Hatfield et al., 1993).
In social psychology, in teacher-student interac-
tion or in group interactions, synchrony between
behaviours occurring during verbal communication
has been shown to reflect the rapports (relationship
and intersubjectivity) within the groups or the dyads
(Bernieri, 1988; LaFrance, 1979).
The very same results have been found for human-
machine interactions: on one hand synchrony of non-
verbal behaviour improves the comfort of the human
and her/his feeling of sharing with the machine (ei-
25
Prepin K. and Pelachaud C..
SHARED UNDERSTANDING AND SYNCHRONY EMERGENCE - Synchrony as an Indice of the Exchange of Meaning between Dialog Partners.
DOI: 10.5220/0003140600250034
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 25-34
ISBN: 978-989-8425-41-6
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

ther a robot or a virtual agent) (Poggi and Pelachaud,
2000) and on the other hand, the human sponta-
neously synchronises during interaction with a ma-
chine when her/his expectations are satisfied by the
machine (Prepin and Gaussier, 2010).
In the case of non-verbal interactions, the phe-
nomenon of synchronisation between two partners
has recently been investigated as a phenomenon
emerging from the dynamical coupling of interac-
tants: that is to say a phenomenon whose description
and dynamics are not explicited in each of the partners
but appear when the interactants are put together and
when the new dynamical system they form is more
complex and richer than the simple sum of partners
dynamics.
In mother-infant interactions via the “double-
video” design cited above, synchrony is shown to
emerge from the mutual engagement of mother and
infant in the interaction (Mertan et al., 1993; Nadel
and Tremblay-Leveau, 1999). In adult-adult interac-
tions mediated by a technological device, synchrony
and coupling between partners has been shown to
emerge from the mutual attempt to interact with the
other in both behavioral studies (Auvray et al., 2009)
and cerebral activity studies (Dumas et al., 2010).
These descriptionsof synchronyas emerging from
the coupling between interactants, are consistent with
the fact cited before, that synchrony reflects the qual-
ity of the interaction. Given interactants, both the
quality of their interaction and the degree of their cou-
pling are tightly linked to the amount of information
they exchange and share: high coupling involves both
synchrony and good quality interaction; synchrony
and quality of the interaction are covarying indices
of the interaction. That makes the synchrony parame-
ter particularly crucial: on one hand it carries dyadic
information, concerning the quality of the ongoing in-
teraction; on the other hand it can be retrieved by each
partner of the interaction, comparing its own actions
to its perceptions of the other (Prepin and Gaussier,
2010).
The emergence of synchrony during non-verbal
interaction has been modelled by both robotics imple-
mentation (Prepin and Revel, 2007) and virtual agent
coupling (Paolo et al., 2008).
In the robotic experiment, two robots controlled
by neural oscillators are coupled together by the way
of their mutual influence: turn-taking and synchrony
emerge (Prepin and Revel, 2007).
In the virtual agent experiment, Evolutionary
Robotics was used to design a dyad of agents able to
favour cross-perception situation; the result obtained
is a dyad of agents with oscillatory behaviours which
share a stable state of both cross perception and syn-
chrony (Paolo et al., 2008).
The stability of these states of cross-perception
and synchrony is a direct consequence of the recip-
rocal influence between the agents.
We have seen there that literature stresses two
main results concerning synchrony. First, synchrony
of non-verbal behaviours during verbal-interactions
is a necessary element for a good interaction to take
place: synchrony reflects the quality of the interac-
tion. Second, synchrony has been described and mod-
elled as a phenomenon emerging from the dynamical
coupling between agents during non-verbal interac-
tions. In this paper, we propose to conciliate these
two results in a model of synchrony emergence dur-
ing verbal interactions.
We propose and test in simulation a model of ver-
bal communication which links the emergence of syn-
chrony of non-verbal behaviours to the level of shared
information between interactants: if partners under-
stand each other, synchrony will arise, and conversely
if they do not understand each other enough, syn-
chrony could not arise. By constructing this model of
agents able to interact as humans do, on the basis of
psychology, neuro-imaging and modelisation results,
that are both the understanding of humans and the be-
lievability of artifacts (e.g. virtual humans) which are
assessed.
In Section 2 we describe the architecture principle
and show how a level of understanding can be linked
to non-verbal behaviours. In Section 3, we test this
architecture, i.e. we test in simulation a dyad of archi-
tectures which interact together. We characterise the
conditions of emergence of coupling and synchrony
between the two virtual agents. Finally, in Section 4,
we discuss these results and their outcomes.
2 MODEL PRINCIPLE
We propose a model accounting for the emergence of
synchrony depending directly on a shared level of un-
derstanding between agents. This model is based on
the four next properties of humans’ interactions:
P1. To emit or receive a discourse modify the internal
state of the agent (Scherer and Delplanque, 2009).
P2. Non-verbal behaviours reflect the internal states
(Matsumoto and Willingham, 2009).
P3. Humans are particularly sensitive to synchrony,
as a cue of the interaction quality and and the mu-
tual understanding between participants (Ducan,
1972; Poggi and Pelachaud, 2000; Prepin and
Gaussier, 2010).
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
26
P4. Synchrony can be modelled as a phenomenon
emerging from the dynamical coupling of agents
(Prepin and Revel, 2007; Paolo et al., 2008; Au-
vray et al., 2009)
The model of agent we propose in the present sec-
tion is implemented in Section 3 as a Neural Network
(NN). Groups of neurons are vectors of variables rep-
resented by capital letters (e.g. V
Input
∈ [−1,1]
n
and
S ∈ [−1, 1]
m
) and the weights matrices which mod-
ulate the links between these groups are represented
by lower case letters (e.g. u ∈ [−1,1]
m×n
): we ob-
tain equations such as u·V
Input
= S. For sake of sim-
plicity, in both the description of the model principle
(this section) and in its implementation and tests (Sec-
tion 3) groups of neurons and weights matrices are
reduced to single numerical variables (∈ [−1,1]).
In the next two subsections, we model the two first
properties, P1 and P2. We describe how the non-
verbal behaviour can be linked to a level of mutual
understanding. Then, in the subsections 2.3 and 2.4,
we describe how this will give to a dyad of agents
coupling capabilities. That constitute the modelling
of the third and fourth properties, P3 and P4.
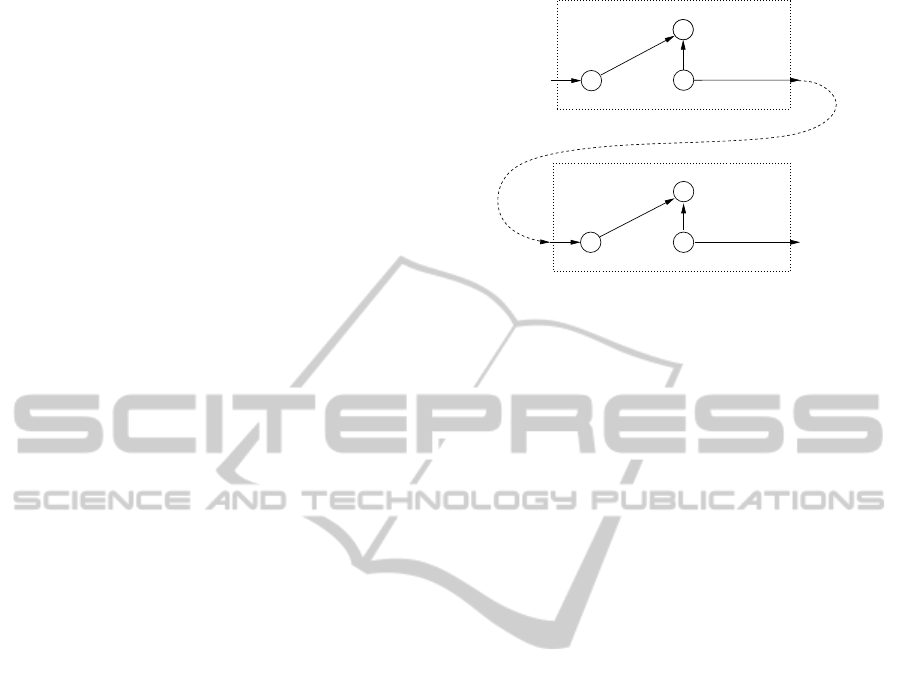
2.1 Speak and Listen Modifies Internal
State
Let us consider a dyad of agents, Agent1 and Agent2.
Each agent’s state is represented by one single vari-
able, S
1
for Agent1 and S
2
for Agent2 (∈ [−1,1]).
Now, let us consider the speech produced by each
agent, the verbal signal V
Act i
(∈ {0,1}), and the
speech heard by each agent, the perceivedsignalV
Per i
(∈ {0,1}).
P1 claims that each agent, either listener or
speaker, has its internal state S
i
modified by verbal
signals: the listener’s internal state is modified by
what it hears, and the speaker’s internal state is mod-
ified by what it says. Two “level of understanding”,
the weights u
i
and u
′
i
, are defined for each agent of
the dyad. u
i
modulates the perceived verbal signal
V
Per i
, and u
′
i
modulates the produced verbal signal
V
Act i
(see fig.1). To model interaction in more natural
settings these u
i
parameters should be influenced by
many variables, such as the context of the interaction
(discussion topic, relation-ship between interactants),
the agents moods and personalities. However in the
present model we combine all these parameters in the
single variable u
i
(∈ [−1,1]). The choice of the values
of u
1
and u
2
is arbitrary near 0.01: it enables a well
balanced sampling of the oscillators’ activations, the
period last around 100 time steps; the other parame-
ters of the architecture are chosen depending on this
one so as not to modify the whole systems dynamics.
Agent2
Agent1
V
Per1
V
Act1
S
1
u
1
u
′
1
V
Per2
V
Act2
S
2
u
2
u
′
2
Figure 1: Verbal perception,V
Per i
, and verbal action,V
Act i
,
both influence the internal state S
i
. These influences depend
respectively on the level of understanding u
i
and u
′
i
.
If t is the time we have the following equations:
S
1
(t + 1) = S
1
(t) + u
1
V
Per1
(t + 1) + u
′
1
V
Act1
(t + 1)
S
2
(t + 1) = S
2
(t) + u
2
V
Per2
(t + 1) + u
′
2
V
Act2
(t + 1)
(1)
Assuming that communication is ideal, i.e. V
Peri
=
V
Act j
, and that Agent1 is the only one to speak, i.e.
V
Act2
= V
Per1
= 0,the system of equations 1 gives:
S
1
(t + 1) = S
1
(t) + u
′
1
V
Act1
(t + 1)
S
2
(t + 1) = S
2
(t) + u
2
V
Act1
(t + 1)
(2)
This first property P1 is crucial in our model, as it
links together the agents’ internal states: each one is
modified by speech depending on its own parameter
u
i
. In the present model, we assume that for a given
agent, understanding of its productions and of its per-
ceptions are similar: for Agent i, u
i
= u
′
i
.
2.2 Non-verbal Behaviours Reflect
Internal State
The second property P2, claims that “non-verbal be-
haviours reflect internal state”. That is to say, agent’s
arousal, mood, satisfaction, awareness, are made
visible thanks to facial expressions, gaze, phatics,
backchannel, prosody, gestures, speech pauses. To
make visible the internal properties of Agent i, a non-
verbal signal, NV
Act i
, is triggered depending on its
internal state, S
i
. When S
i
reaches the threshold β,
the agent producesnon-verbal behaviours with th
β
the
threshold function (see fig. 2):
NV
Act i
(t) = th
β
(S
i
(t)) (3)
We suggest here that pitch accents, pauses, head
nods, changes of facial expressions and other non-
verbal cues are, for a certain part, produced by agents
when a particularly important idea arises, when the
explanation reach a certain point, when an idea or a
SHARED UNDERSTANDING AND SYNCHRONY EMERGENCE - Synchrony as an Indice of the Exchange of
Meaning between Dialog Partners
27
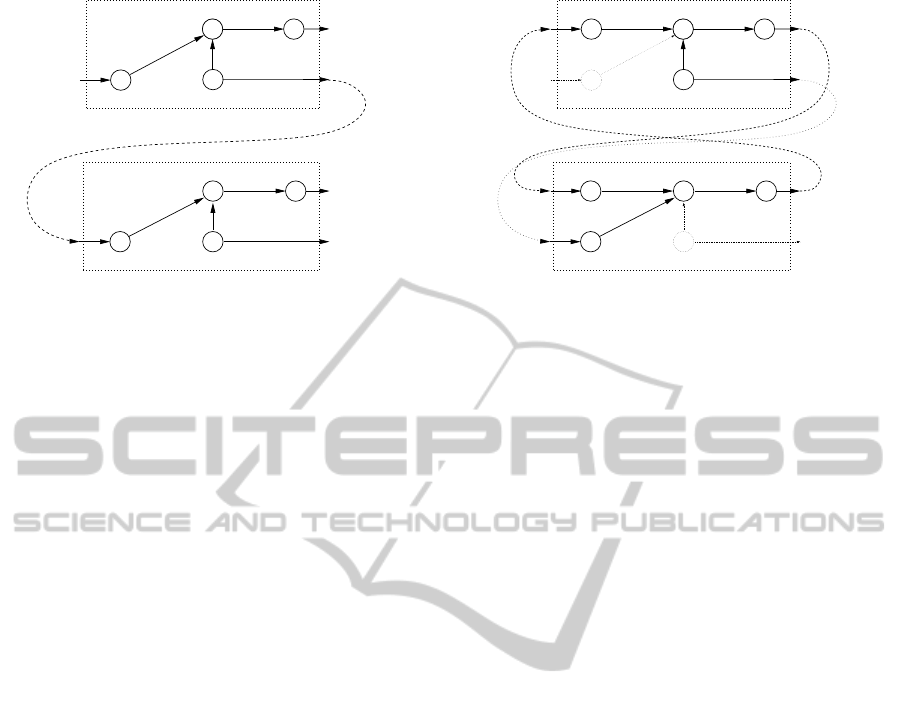
Agent2
Agent1
th
β
th
β
V
Per1
V
Act1
S
1
NV
Act1
u
1
u
′
1
V
Per2
V
Act2
S
2
NV
Act2
u
2
u
′
2
Figure 2: Each agent produces non-verbal behaviours
NV
Act i
when S
i
reaches the threshold β. NV
Act i
depends
on how much the internal state S
i
has been influenced by
what has been said.
concept starts to be outlined. We assume that the phe-
nomenon is similar in both speaker and listener, it is
driven by the evolution of what is wanted to be ex-
pressed in one case and it is driven by what is heard
in the other case. If speaker and listener understand
each other, these peaks of arousal and understanding
should co-occur: they appear to be temporally linked.
These peaks will be the bases of entrainment for in-
tentional coordination between partners. And then
this coordination could be seen as a marker of inter-
action quality.
Considering these two first points, that is to say,
equations 2 and 3 we have the following system of
equations :
NV
Act1
(t
1
) = th
β
(
∑
t
1
t
0
u
1
V
Act1
(t))
NV
Act2
(t
1
) = th
β
(
∑
t
1
t
0
u
2
V
Act1
(t))
(4)
If an agent is enough influenced by what is said, it
produces non-verbal signals. And if u
1
= u
2
then
NV
Act1
= NV
Act2
, agents’ non-verbal behaviours may
be synchronised, where as if u
1
and u
2
are too differ-
ent, agents will not be able to synchronise.
2.3 Sensitivity to Synchrony
To account for the property P3, “sensitivity of human
to synchrony”, we use the fact that sensitivity to syn-
chrony can be modelled by simple model of mutual
reinforcement of the perception-action coupling (Au-
vray et al., 2009; Paolo et al., 2008). In addition to
the influence from speech (either during its percep-
tion or its production), each agent’s internal state S
i
is
influenced by the non-verbal behaviour it perceives
from the other NV
Act j
, modulated by sensitivity to
non-verbal signal σ (see fig.3).
The internal state of each agent is modified by
both what it understand of the speech and what it sees
Agent2
Agent1
th
β
th
β
V
Act1
σ
S
1
NV
Per1
NV
Act1
u
1
V
Per2
σ
S
2
NV
Per2
NV
Act2
u
2
Figure 3: Agent1’s internal state, S
1
, is influenced by both
its own understanding of what it is saying u
1
·V
Act1
and the
non-verbal behaviour of Agent2, σ · NV
Act2
. Agent2’s in-
ternal state,
2
, is influenced by its own understanding of
what Agent1 says u
2
·V
Act1
and the non-verbal behaviour
of Agent1, σ· NV
Act1
from the non-verbal behaviour of the other:
S
1
(t + 1) = S
1
(t) + u
1
V
Act1
(t + 1) + σNV
Act2
(t)
S
2
(t + 1) = S
2
(t) + u
2
V
Act1
(t + 1) + σNV
Act1
(t)
(5)
This last equation will favour the synchronisation by
increasing the reciprocal influence when agents’ in-
ternal state reach together a high level.
2.4 Coupling between Dynamical
Systems
How to enable agents involved in a verbal interaction,
to be as much synchronised as they share informa-
tion? To enable synchrony to emerge between the
two agents, we used the fact that synchronisation can
be modelled as a phenomenon emerging from the dy-
namical coupling within the dyad (Prepin and Revel,
2007): on one hand agents must have internal dynam-
ics which control their behaviour; on the other hand,
they must be influenced by the other’s behaviours.
In the previous subsections, we proposed a dyad
of agent which mutually influence. If we replace
the non-verbal behaviours of agents by their internal
states in the system of equations 5, it gives:
S
1
(t + 1) = S
1
(t) + u
1
V
Act1
(t + 1) + σth
β
(S
2
(t))
S
2
(t + 1) = S
2
(t) + u
2
V
Act1
(t + 1) + σth
β
(S
1
(t))
(6)
To enable coupling to occur, the agents should also
be dynamical systems: systems which state evolves
along time by themselves. The internal state of the
agents S
i
producesbehaviours and is influenced by the
other agent’s behaviour. To ensure internal dynam-
ics, we made this internal state a relaxation oscillator,
which increases linearly and decreases rapidly when
it reaches the threshold 0.95 (fig. 5 shows an example
of the signals obtained). By oscillating , the internal
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
28
states agents will not only influence each other but
also be able to correlate one with the other (Prepin
and Revel, 2007).
Here, two cases are interesting.
When the internal states of both agents are under
the threshold triggering non-verbal behaviours, β, the
system of equation 6 becomes:
S
1
(t + 1) = S
1
(t) + u
1
V
Act1
(t + 1)
S
2
(t + 1) = S
2
(t) + u
2
V
Act1
(t + 1)
(7)
The two agents are almost independent, they are only
influenced by the speech of Agent1 and each one pro-
duces its own oscillating dynamic. That could be the
case if two tired people (high β) speak about a not so
interesting subject (u
i
are low): they are made apathic
by the conversation, they do not express anything.
The second interesting case is when both agents’
internal states are above the threshold β. The system
of equation 6 becomes:
S
1
(t + 1) = S
1
(t) + u
1
V
Act1
(t + 1) + σS
2
(t)
S
2
(t + 1) = S
2
(t) + u
2
V
Act1
(t + 1) + σS
1
(t)
(8)
In this case agents are not anymore independent, they
influence each other depending on the way they un-
derstand speech. If we push the recursivity of these
equations one step further we obtain:
S
1
(t + 1) = S
1
(t) + u
1
V
Act1
(t + 1)+
σ(S
2
(t − 1) + u
2
V
Act1
(t) + σS
1
(t − 1))
S
2
(t + 1) = S
2
(t) + u
1
V
Act1
(t + 1)+
σ(S
1
(t − 1) + u
1
V
Act1
(t) + σS
2
(t − 1))
(9)
And now we see the effect of coupling, that is to say
that agents are not only influenced by the state of the
other but they are influenced by their own state, me-
diated by the other: the non-verbal behaviours of the
other becomes their own biofeedback (Nadel, 2002).
When the threshold β is overtaken, the reciprocal in-
fluence is recursive and becomes exponential: the dy-
namics of S
1
and S
2
are not any more independent,
they are influenced in their phases and frequencies
(Pikovsky et al., 2001; Prepin and Revel, 2007).
3 TEST OF THE MODEL
We tested this model by implementing a dyad of agent
as a neuronal network in the neuronal network sim-
ulator Leto/Prometheus (developed in the ETIS lab.
by Gaussier et al. (Gaussier and Cocquerez, 1992;
Gaussier and Zrehen, 1994)), and by studying its
emerging dynamics with different sets of parameters.
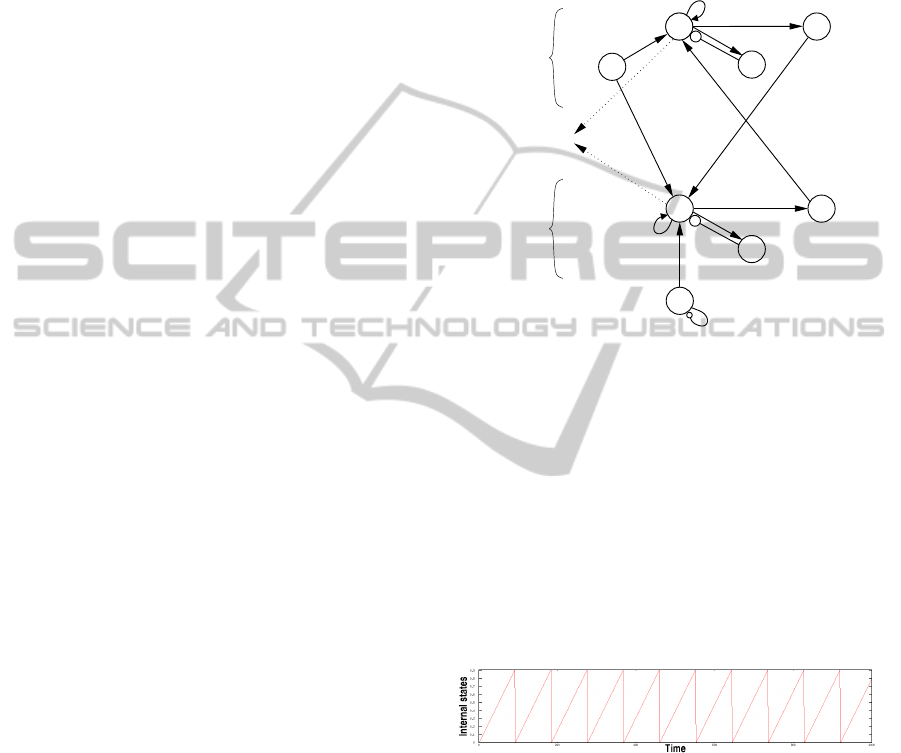
3.1 Implementation
We implemented the model on the neural networks
simulator Leto/Prometheus. Leto/Prometheus simu-
lates the dynamics of neural networks by an update of
the whole network at each time step. We use groups
of neurons with one neuron, and non-modifiable links
between groups. The schema of fig. 4 show this im-
plementation.
The internal states of agents, S
i
, are relaxation os-
Agent2
Agent1
th
β
th
β
V
Act1
S
1
NV
Act1
u
1
σ
σ
S
2
NV
Act2
u
2
−1000
−1000
th
0.95
th
0.95
1
1
∆φ
ini
Recording
Relax1
Relax2
−1000
Figure 4: Implementation of the two agents. The couples
(S
1
;Relax1) and (S
2
;Relax2) are relaxation oscillators. The
parameters which will be tested are the following: β, the
threshold which controls the non-verbal production; u
1
and
u
2
which control the agents’ level of sharing; ∆φ
ini
, the ini-
tial phase-shift between agents.
cillators: the re-entering link of weight 1 makes the
neuron behave as a capacity, and the Relax neuron
which fires when a 0.95 threshold is reached, inhibits
S
i
and makes it relax (see fig. 5 for an example of the
activation obtained).
V
Act1
, Agent1’s verbal production, is a neuron of
Figure 5: Activations of the internal state S
1
(t) for u
1
=
0.01.
constant activity 1. This neuron feeds the oscillators
of both agents, weighted by their level of understand-
ing u
1
and u
2
. The values of u
1
and u
2
are near 0.01:
it enables a well balanced sampling of the oscillators’
activations, the period last around 100 time steps.
In addition to agent understandingu
1
and u
2
, three
other parameters are modifiable in this implementa-
tion:
• The threshold β which controls the triggering of
non-verbal signal.
SHARED UNDERSTANDING AND SYNCHRONY EMERGENCE - Synchrony as an Indice of the Exchange of
Meaning between Dialog Partners
29
• The sensitivity of agent’s internal state to non-
verbal signal σ which weights NV
Act i
. These two
parameters β and σ directly control the amount
of non-verbal influence between the agents: they
must be high enough to enable coupling, for in-
stance reducing initial phase-shift between oscil-
lators or compensating phase deviation when u
1
6=
u
2
.
• The initial phase shift ∆φ
ini
, which makes agents
start with a phase shift between S
1
(t
ini
) and
S
2
(t
ini
) at the beginning of each test of the archi-
tecture.
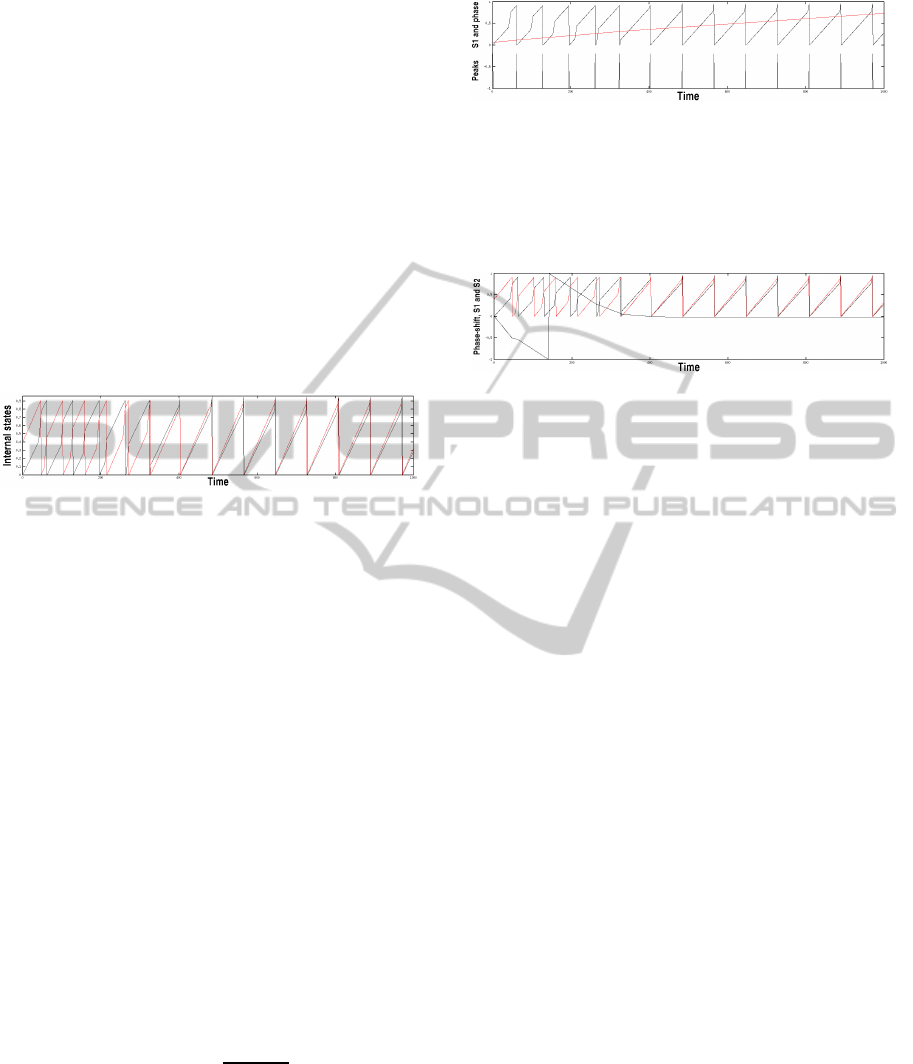
Finally, the variables recorded during these tests
are the internal states of both agents, S
1
(t) and S
2
(t)
(see fig. 6 for an example).
Figure 6: Activations recorded for u
1
= 0.01, u
2
= 0.011,
β = 0.85, σ= 0.05 and ∆φ
ini
= 0.4. Despite the initial phase
shift and the phase deviation, the two agents synchronise.
This is a stable state of the dyad, it remains until the end of
the experiment (5000 time steps).
3.2 Test of Synchrony Emergence
For a given set of parameters, to determine if in-
phase synchronisation occurred between agents, we
used a procedure described by Pikovsky, Rosenblum
and Kurths in their reference book “Synchronisation”
(Pikovsky et al., 2001). This procedure consists in
comparing the phases of two signals to determine if
they are synchronous or not.
First we used the fact that relaxation oscillators
can be characterised by their peaks. There is a peak at
time t
k
when S
i
(t
k
) ≥ 0.9β and S
i
(t
k
+ 1) = 0 . Then,
we used the fact that phase can be rebuilt from these
peaks (Pikovsky et al., 2001). We assign to the time
t
k
the values of the phase φ(t
k
) = 2πk, and for every
instants of time t
k
< t < t
k
+ 1 determine the phase as
a linear interpolation between these values (see fig.7):
φ(t) = 2πk+ 2π
t − t
k
t
k+1
− t
k
(10)
After that, when the phases of signals are obtained,
we consider their difference modulo 2π (see fig.8).
Horizontal plateaus in this graph reflect periods of
constant phase-shift between signals, i.e. synchroni-
sation. Horizontal plate aux near zero reflect periods
of synchronisation and co-occurrence of non-verbal
signals.
Figure 7: Signal, Peaks and Phase. In the upper part of the
graph, there is the original signal S
1
(shown in fig.6) and the
associated re-built phase (we can notice the change of phase
slope when synchronisation occurs). In the lower part of the
graph, there are the peaks extracted from S
1
in order to re-
build the phase.
Figure 8: Signals of two agents and their associated phase-
shift ∆
φ
1
,φ
2
(t). When agents synchronise with each other,
their phase-shift remains constant and near zero.
Finally, for each 5000 time steps simulation, we de-
fine that in-phase synchronisation occurs if the phase-
shift becomes near zero at a time t
synch
, smaller than
3000, and remains constant until the end. We defined
the synchronisation speed as SynchSpeed = (3000−
t
synch
)/3000. If in-phase synchronisation is immedi-
ate SynchSpeed = 1; if in-phase synchronisation oc-
curs at time step 3000 SynchSpeed = 0; and if in-
phase synchronisation do not occurs SynchSpeed < 0.
3.3 Test of Architecture Parameters
We tested different parameters of this model, first to
show the direct link existing between emergence of
synchrony and level of sharing between interactants,
and second to characterise the different properties of
this model.
To show the direct link existing between emer-
gence of synchrony and level of sharing between in-
teractants, we fixed u
1
to 0.01 and made u
2
vary
between 0 and 0.02, that is to say the shared un-
derstanding of the two agents differs between 0 and
100%. Notice here the importance to test synchroni-
sation when u
2
= 0: if synchronisation occurs when
u
2
= 0, i.e. when Agent2 does not perceived the
speech of Agent1, that means that agents synchronise
every time just thank to non-verbal signal of Agent1;
in that case, synchrony is not any more an in dice
of the interaction quality, the influence of non-verbal
signals (linked to β and σ) is too high.
To evaluate the influence of the amount of non-
verbal signal exchanged, we made the threshold β
vary between 0 and 0.95.
To evaluate the influence of the sensitivity to non-
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
30
verbal signal, we made the sensitivity σ vary between
0 and 0.09.
Finally, to evaluate the abilities of such a dyad of
agents to re-synchronise after an induced phase-shift
or after a misunderstanding, we made the initial phase
shift ∆φ
ini
vary between 0 and π.
Shared Understanding Influence. When the two
agents are synchronousin phase (∆φ
ini
= 0), we tested
which of the u
2
values keep agents synchronised or
make them disynchronise. For fixed β = 0.7, σ = 0.05
and ∆φ
ini
= 0, u
2
varies between 0 and 0.02. The fol-
lowing graph of fig. 9 shows the associated disyn-
chronisation speed.
When the difference between u
1
and u
2
is to high,
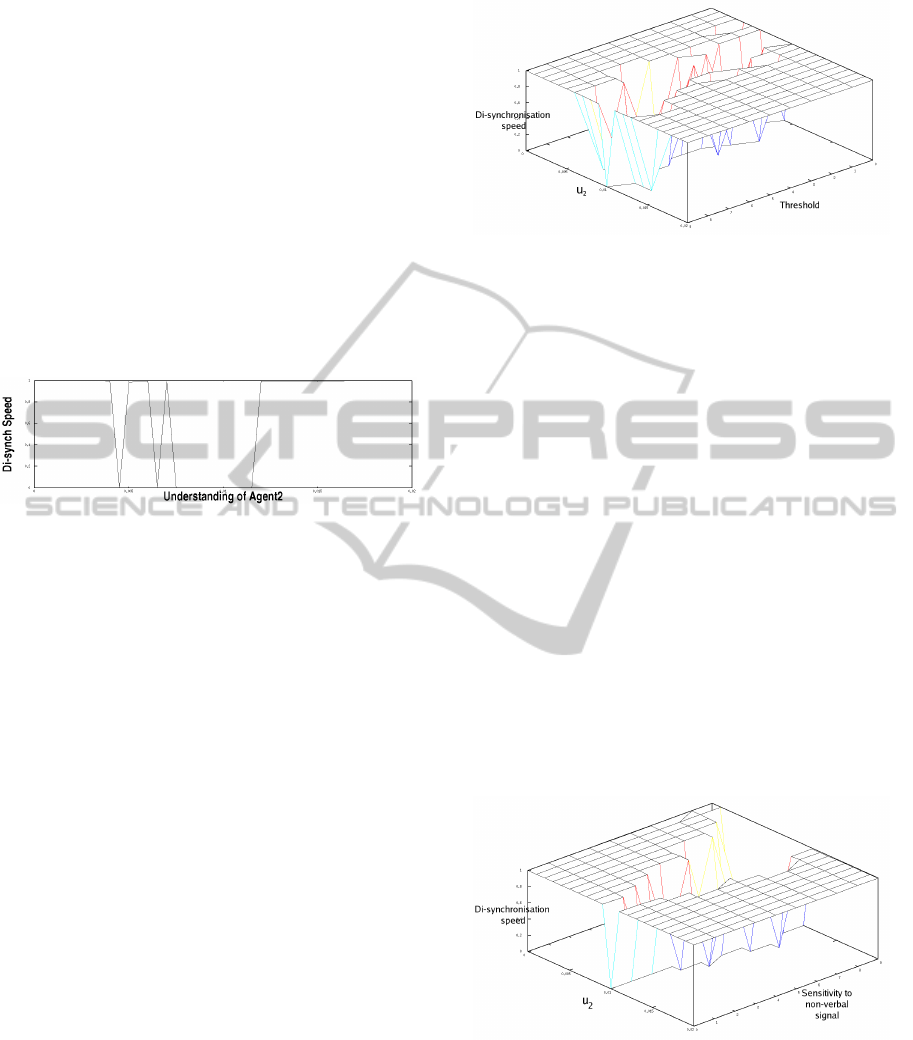
Figure 9: Di-synchronisation speed of the dyad, depend-
ing on the Agent2 understanding u
2
. u
2
varies from left to
right between 0 and 0.02. A null disynchronisation speed
means that synchronisation has been maintained until the
end of the experiment. A disynchronisation speed 1 is for
a dis-synchronisation occurring at the very beginning of the
experiment.
no synchronisation can occur since even when syn-
chrony is forced at the beginning of the experiment,
agent disynchronise.
Influence of Amount of Non-verbal Signals. The
coupling and synchronisation capabilities of the dyad
of agents, may directly depend on the amount of non-
verbal signals they exchange: among other, the abil-
ity to compensate a difference of understanding may
be improved by an increase of non-verbal signals ex-
changed. We tested this effect by calculating disyn-
chronisation speeds as just above, making u
2
vary be-
tween 0 and 0.02 and the threshold β varying between
0 and 0.9 (σ = 0.05). We obtained the 3D graph of fig.
10.
When β = 0.9, that is to say when very few non-
verbal signals are exchanged, synchrony maintains
only when the two agents have equal level of under-
standing, u
1
= u
2
= 0.01. For other values, the influ-
ence of the threshold β is not so clear: the dyad does
not resist better to disynchronisation when β < 0.5
than when 6 ≤ β ≤ 8. This effect, or this absence
of effect, may be due to the fact that the more β de-
creases, the less accurate in time the non-verbal sig-
nals are: if β is low, non-verbal signals are emit earlier
Figure 10: Di-synchronisation speed of the dyad, depend-
ing on the Agent2 understanding u
2
and the threshold β
(σ = 0.5). u
2
varies between 0 and 0.02. β varies from 0.9
to 0, in the sens of non-verbal signals increase. When the
d i-synchronisation speed value is null, synchronisation has
been maintained until the end of the experiment. A disyn-
chronisation speed 1 is for a disynchronisation occurring at
very beginning of the experiment.
before the peaks of S
i
activation and on a larger time
window, they are not enough precise in time to main-
tain synchrony. We chosen β = 0.7, i.e. the mean of
its best performances values.
Sensitivity to Non-verbal Signals. Another way to
modify the influence of non-verbal signals on cou-
pling and synchronisation properties of the dyad, is
to modify the sensitivity to the perceived non-verbal
signal, σ. We tested this effect by calculating disyn-
chronisation speeds as previously, making u
2
vary be-
tween 0 and 0.02 and the sensitivity σ varying be-
tween 0 and 0.09 (β = 0.07). We obtained the 3D
graph of fig. 11.
Sensitivity to non-verbal signal σ have a direct
Figure 11: Di-synchronisation speed of the dyad, depend-
ing on the Agent2 understanding u
2
and the sensitivity σ
(β = 0.7). u
2
varies between 0 and 0.02. σ varies from 0
to 0.09. When the d i-synchronisation speed value is null,
synchronisation has been maintained until the end of the ex-
periment. A disynchronisation speed 1 is for a disynchroni-
sation occurring at the very beginning of the experiment.
effect on agents to stay synchronous even with dif-
ferent understandings: the higher is sensitivity σ, the
SHARED UNDERSTANDING AND SYNCHRONY EMERGENCE - Synchrony as an Indice of the Exchange of
Meaning between Dialog Partners
31
more resistant to difference between u
i
the synchro-
nisation capability of the dyad is. The effect of σ is
important despite its low value (σ < 0.1) due to the
high number of non-verbal signal exchanged: when
Agent i’s internal state S
i
reaches the threshold β, it
produces the non-verbal signals NV
Act i
at every time
step until S
i
relaxes. That can last between 0 and 20
time steps for each oscillation period. The effect of σ
is multiplied by this number of steps.
It is important to notice here that the σ effect on
the dyad resistance to u
i
differences, has a counter-
part. This counter-part is the fact that when σ increase
and make the dyad more resistant to disynchronisa-
tion, it also makes the synchronisation of the dyad
less related to mutual understanding. For instance,
when σ ≥ 0.7, agents stay synchronous even when
Agent2 do not understand anything, u
2
= 0. To bal-
ance these two effects, facilitation of synchronisation
and decrease of synchrony significance, we chosen a
default value of σ = 0.05.
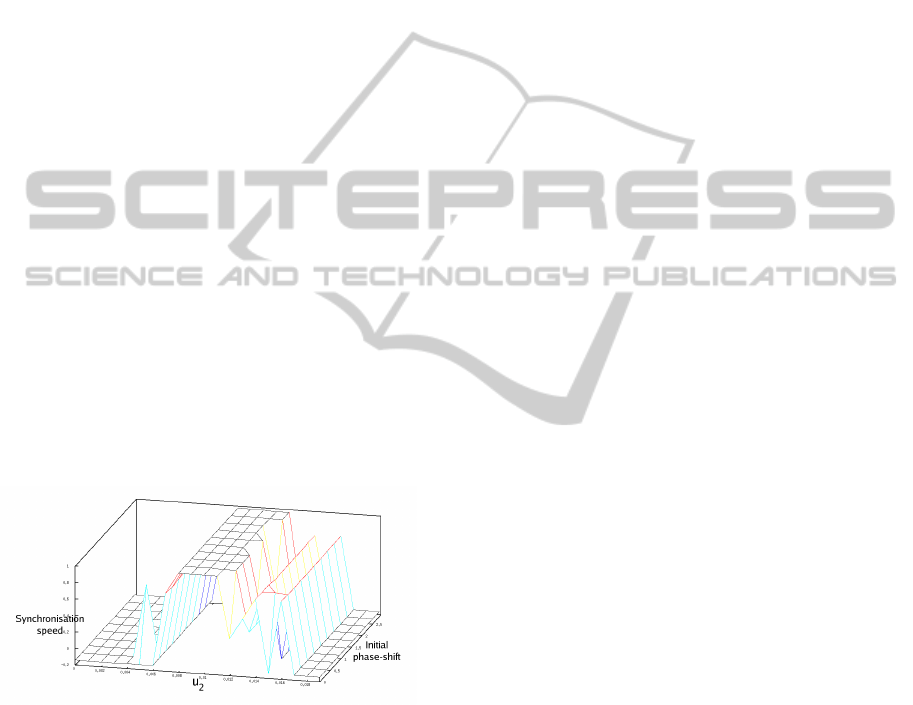
Re-synchronisation Capability. Given a value of
Agent2 understanding u
2
, we tested the ability of the
dyad Agent1-Agent2 to re-synchronise after a phase
shift. We made the initial phase-shift ∆φ
ini
vary be-
tween 0 and π for every values of u
2
and calculated
the speed of synchronisation if any. The 3D graph of
fig. 12 shows the synchronisation speed for each cou-
ple (u
2
;∆φ
ini
).
The initial phase-shift between S
1
and S
2
does
Figure 12: Synchronisation speed of the dyad, depending
on the Agent2 understanding u
2
and initial phase-shift ∆φ
ini
(σ = 0.05 and β = 0.7). u
2
varies between 0 and 0.02. ∆φ
ini
varies from 0 to π. When the synchronisation speed value
is null, the dyad did not synchronised until the end of the
experiment. A synchronisation speed 1 is for a synchroni-
sation occurring at the very beginning of the experiment.
not appear to affect the synchronisation capacities of
the dyad. With the chosen σ = 0.05 and β = 0.7,
when the agents’ levels of understanding u
1
and u
2
do not differ more than 15% of each other, they syn-
chronise systematically and very quickly: for instance
they synchronise even when they start in anti-phase
(∆φ
ini
= π). And conversely, when the levels of un-
derstanding u
1
and u
2
are more than 15% different,
synchronisation is no more immediate.
4 DISCUSSION
We proposed and tested a model which links emer-
gence of synchronybetween dialogue partners to their
level of shared understanding. This model assesses
both the understanding of humans and the believabil-
ity of artifacts (e.g. virtual humans). When two
interactants have similar understanding of what the
speaker says, their non-verbal behaviours appear syn-
chronous. Conversely, when the two partners have
different understanding of what is being said, they
disynchronise. This model is implemented as a dy-
namical coupling between two talking agents: on one
hand, each agent proposes its own dynamics; on the
other hand, each agent is influenced by its perception
of the other. These are the two minimal conditions
enabling coupling. What makes this model particular
is that the internal dynamics of agents are generated
by the meaning exchanged through speech. It links
the dynamical side of interaction to the formal side of
speech.
We tested this model in simulation, and showed
that synchrony effectively emerges between agents
when they have close level of understanding. We no-
ticed a clear effect of the level of understanding on
the capacity of the agents to both remain synchronous
and re-synchronise: agents disynchronise if the level
of shared understanding is lower than 85% (with our
parameters) and conversely agents synchronise if the
level of shared understanding is higher than 85%.
These results tend to prove that, considering that syn-
chrony between agents is an indice of good interaction
and shared understanding, the reciprocal property is
true too; that is disynchrony accounts for misunder-
standing.
We have shown that agents remain synchronous
depends on both their shared understanding (the ratio
between u
1
and u
2
) and their sensitivity to non-verbal
behaviour (σ in our implementation). The more sensi-
tive to non-verbal behaviours are the agents, the more
resistant to disynchronisation is the dyad and the eas-
ier is the synchronisation. An important counter-part
of this easier synchronisation is that it makes syn-
chrony less representative of shared understanding:
agents or people with very different levels of under-
standing will be able to synchronise; if sensitivity to
non-verbal behaviour is too high, the dyadic parame-
ter of synchrony is not a cue of shared understanding.
By contrast, the facility agents trigger non-verbal be-
haviours when their internal states are high (thresh-
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
32

Figure 13: Greta, Obadia, Poppy and Prudence. They are
four agents implemented on the open source system Greta.
Each one has its own personality and level of understanding.
When interacting together, different levels of non-verbal
synchrony should appear between the agents of this group.
old β) does not appear to change the synchronisa-
tion properties of the dyad: the higher number of ex-
changed non-verbal signals seems to be compensated
by their associated decrease of precision.
In addition to the effect of shared understanding
on the stability of synchrony between agents, we have
tested the effect of shared understanding on the capac-
ity of the dyad to re-synchronise. For instance, dur-
ing a dialogue, synchrony can be broken by the use of
new concept by the speaker. That may result in lower-
ing the level of shared understanding below the 85%
necessary for remaining synchronous. Synchrony can
also be disrupted by an external eventwhich can intro-
duce a phase-shift between interactants. Given fixed
sensitivity to non-verbal behaviour (σ) and facility
to trigger non-verbal behaviours (β), we tested how
quickly the dyad can re-synchronise after a phase-
shift. The shared level of understanding necessary to
enable re-synchronisation appeared to be the same as
the one under which agents disynchronise.
Two crucial points must be noticed here. First,
when agents’ understanding do not differ more than
15% (shared understanding higher than 85%), agents
synchronise systematically whatever the phase-shift
is, and when agent’s understanding differ more than
15% they disynchronise. Second, both synchronisa-
tion and disynchronisation of agents are very quick,
lasting about one oscillation of the agents’ internal
states. Synchronisation and disynchronisation are
very quick effects of respectively misunderstanding
and shared understanding: agents involved in an in-
teraction do not have to wait to see synchrony appears
when they understand each other, they have a fast an-
swer to whether they understand each other or not.
The 5000 time steps length of our tests allowed us
to test the stability of synchrony or disynchrony after
their occurrence; however it is clearly not a natural
situation. Synchrony in natural interaction is a vary-
ing phenomenon involving multiple synchronisation
and disynchronisation phases: the level of shared un-
derstanding varies along the interaction. In fact disyn-
chrony may be quite informativefor the dyad as its de-
tection enables agents to adapt one another. In natural
interactions, synchrony occurring after disynchrony
shows that agents share understanding whereas they
did not before: they have benefited from the interac-
tion and exchanged information.
As a consequence, the mean level of shared under-
standing necessary for good interaction to take place
between persons in natural context would be much
more reasonable: the 85% of shared understanding
occurs in phases of particularly good interaction and
its is not a hard constraint on the whole dialogue; this
very high level necessary for synchronisation should
be divided by the ratio of synchrony vs disynchrony
phases present in natural interaction. For instance
we can imagine that a level of shared understanding
higher than 85% would occur when people involved
in a discussion have just reached an agreement. By
contrast, when the level of shared understanding stays
all along the dialogue far under 85%, the dyad would
be more like two strangers trying to talk together, or
a professional talking with technical words to a naive
listener.
Our model has been tested and its principle has
been validated in agent-agent context. To go a step
farther, in “wild world” situations involving humans,
two elements must be added: Understanding of lan-
guage during interaction with human; Recognition of
non-verbal behaviours of human users. In the near
future, we will adapt the present neural architecture
to the open source virtual agent Greta (Pelachaud,
2009). The system Greta enables one to generate
multi-modal (verbal and non-verbal) behaviours on-
line and with accurate timing. The verbal signals
will be modelled as elements of “small-talk” and
the non-verbal signal will be modelled as, pitch ac-
cents, pauses, head nods, head shakes and facial ex-
pressions. To test the real impact of such a model
on human perception of interaction, we will per-
form perceptive evaluation: we aim to simulate a
group of virtual agents dialoguing with each other
(see fig.13). Each agent will have its own personality
and level of understanding of what being said. This
will lead to pattern of synchronisation and disynchro-
nisation. Among other, agents which share under-
standing should display inter-synchronypattern (Con-
don, 1976). Finally, human observers should clearly
fill which agent is sharing understanding with which
other agent.
SHARED UNDERSTANDING AND SYNCHRONY EMERGENCE - Synchrony as an Indice of the Exchange of
Meaning between Dialog Partners
33

In conclusion, we can notice that, in ad-
dition to the two main results of this study
−“disynchrony accounts for misunderstanding” and
“synchronisation and disynchronisation are very
quick phenomenons”− another result is the model it-
self. It proposes a link between synchrony and inter-
subjectivity by the use of dynamical system coupling:
synchrony and dynamical coupling emerge together
when agents mutually understand each other; as a
consequence synchrony account for good interaction.
We believe, this model is a start to answer the is-
sues of what is the part of dynamical coupling be-
tween agents involved in verbal interaction? What
is the part of emerging dynamics in the communica-
tion of meanings and intentions? And moreover, how
these two parts can co-exist and feed each other?
ACKNOWLEDGEMENTS
This work has been partially financed by the Euro-
pean Project NoE SSPNet (Social Signal Processing
Network). Nothing could have been done without the
Leto/Prometheus NN simulator, lent by the Philippe
Gaussier’s team (ETIS lab, Cergy-Pontoise, France).
REFERENCES
Auvray, M., Lenay, C., and Stewart, J. (2009). Perceptual
interactions in a minimalist virtual environment. New
ideas in psychology, 27:32–47.
Bernieri, F. J. (1988). Coordinated movement and rapport
in teacher-student interactions. Journal of Nonverbal
Behavior, 12(2):120–138.
Chammat, M., Foucher, A., Nadel, J., and Dubal, S. (2010).
Reading sadness beyond human faces. Brain Re-
search, In Press, Accepted Manuscript:–.
Condon, W. S. (1976). An analysis of behavioral organisa-
tion. Sign Language Studies, 13:285–318.
Condon, W. S. and Ogston, W. D. (1966). Sound film
analysis of normal and pathological behavior patterns.
Journal of Nervous and Mental Disease, 143:338–
347.
Dubal, S., Jouvent, A. F. R., and Nadel, J. (2010). Human
brain spots emotion in non humanoid robots. Social
Cognitive and Affective Neuroscience, in press:–.
Ducan, S. (1972). Some signals and rules for taking speak-
ing turns in conversations. Journal of Personality and
Social Psychology, 23(2):283–292.
Dumas, G., Nadel, J., Soussignan, R., Martinerie, J., and
Garnero, L. (2010). Inter-brain synchonization during
social interaction. PLoS One, 5(8):e12166.
Gaussier, P. and Cocquerez, J. (1992). Neural networks for
complex scene recognition : simulation of a visual
system with several cortical areas. In IJCNN Balti-
more, pages 233–259.
Gaussier, P. and Zrehen, S. (1994). Avoiding the world
model trap: An acting robot does not need to be so
smart! Journal of Robotics and Computer-Integrated
Manufacturing, 11(4):279–286.
Hatfield, E., Cacioppo, J. L., and Rapson, R. L. (1993).
Emotional contagion. Current Directions in Psycho-
logical Sciences, 2:96–99.
Kendon, A. (1990). Conducting Interaction: Patterns of Be-
havior in Focused Encounters. Cambridge University
Press, Cambridge, UK.
LaFrance, M. (1979). Nonverbal synchrony and rapport:
Analysis by the cross-lag panel technique. Social Psy-
chology Quarterly, 42(1):66–70.
Matsumoto, D. and Willingham, B. (2009). Spontaneous
facial expressions of emotion in congenitally and non-
congenitally blind individuals. Journal of Personality
and Social Psychology, 96(1):1–10.
Mertan, B., Nadel, J., and Leveau, H. (1993). New perspec-
tive in early communicative development, chapter The
effect of adult presence on communicative behaviour
among toddlers. Routledge, London, UK.
Murray, L. and Trevarthen, C. (1985). Emotional regula-
tion of interactions vetween two-month-olds and their
mothers. Social perception in infants, pages 101–125.
Nadel, J. (2002). Imitation and imitation recognition: their
functional role in preverbal infants and nonverbal
children with autism, pages 42–62. UK: Cambridge
University Press.
Nadel, J. and Tremblay-Leveau, H. (1999). Early social
cognition, chapter Early perception of social contin-
gencies and interpersonal intentionality: dyadic and
triadic paradigms, pages 189–212. Lawrence Erlbaum
Associates.
Paolo, E. A. D., Rohde, M., and Iizuka, H. (2008). Sensi-
tivity to social contingency or stability of interaction?
modelling the dynamics of perceptual crossing. New
ideas in psychology, 26:278–294.
Pelachaud, C. (2009). Modelling multimodal expression of
emotion in a virtual agent. Philosophical Transactions
of Royal Society. Biological Science, 364:3539–3548.
Pikovsky, A., Rosenblum, M., and Kurths, J. (2001). Syn-
chronization: A Universal Concept in Nonlinear Sci-
ences. Cambridge University Press, Cambridge, UK.
Poggi, I. and Pelachaud, C. (2000). Emotional meaning
and expression in animated faces. Lecture Notes in
Computer Science, pages 182–195.
Prepin, K. and Gaussier, P. (2010). How an agent can de-
tect and use synchrony parameter of its own interac-
tion with a human? In et al., A. E., editor, COST
Action2102, Int. Traing School 2009, Active Listening
and Synchrony. LNCS 5967, pages 50–65. Springer-
Verlag, Berlin Heidelberg.
Prepin, K. and Revel, A. (2007). Human-machine interac-
tion as a model of machine-machine interaction: how
to make machines interact as humans do. Advanced
Robotics, 21(15):1709–1723.
Scherer, K. and Delplanque, S. (2009). Emotions, signal
processing, and behaviour. In Chemosensory Percep-
tion Symposium, Geneva. Firmenich.
Tronick, E., Als, H., Adamson, L., Wise, S., and Brazel-
ton, T. (1978). The infants’ response to entrapment
between contradictory messages in face-to-face inter-
actions. Journal of the American Academy of Child
Psychiatry (Psychiatrics)., 17:1–13.
Yngve, V. H. (1970). On getting a word in edgewise. In So-
ciety, C. L., editor, Papers from the 6th regional meet-
ing, pages 567–578.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
34
