
QUORUM SENSING FOR COLLECTIVE ACTION
AND DECISION-MAKING IN MOBILE AUTONOMOUS TEAMS
Donald A. Sofge
Naval Research Laboratory, 4555 Overlook Avenue SW, Washington, DC, U.S.A.
William F. Lawless
Paine College, 1235 15th Street, Augusta, GA, U.S.A.
Keywords: Autonomous, Multi-agent team, Ensemble, Quorum sensing, Collective, Bio-inspired control, Swarm.
Abstract: Design of controllers for teams of mobile autonomous systems presents many challenges that have been
addressed in biological systems, such as behavior-based control paradigms that are decentralized,
distributed, scalable, and robust. Quorum sensing is a distributed, decentralized decision-making process
used by bacteria and by social insects to coordinate group behaviors and perform complex tasks. It is used
by bacteria to control the colony behavior for a variety of functions, such as biofilm construction or
initiating pathogenicity inside a host. It is used by social insects including the ant Temnothorax albipennis
to collectively evaluate and select from amongst potentially many new nesting sites.Honeybees (Apis
mellifera) use quorum sensing to collectively choose a new nesting site when the swarm grows too large
and needs to split. It is shown that the quorum sensing paradigm may be used to provide robust
decentralized team coordination and collective decision-making in mobile autonomous teams performing
complex tasks. In this effort quorum sensing-inspired techniques are developed and applied to the design of
a decentralized controller for a team of mobile autonomous agents surveying a field containing buried
landmines.
1 INTRODUCTION
Today’s military is increasingly reliant on the use of
unmanned systems to perform a variety of missions
including surveillance, precision target designation,
mine detection, signals intelligence, and chemical-
biological-radiological-nuclear (CBRN)
reconnaissance, as described in the Office of the
Secretary of Defense FY2009–2034 Unmanned
Systems Integrated Roadmap (OSD, 2009). Many of
the programs, systems and technologies described in
OSD’s 25-year roadmap for unmanned systems
require the development of capabilities for
autonomous operations for teams of these systems
working together to execute missions. But
developing capabilities for controlling teams of
autonomous systems, and effectively utilizing these
teams to achieve mission objectives, presents many
technical challenges.
Fortunately, some of these challenges have been
addressed in biological systems such as colonies of
bacteria and social insects. In this paper we examine
quorum sensing in biology and propose its use as a
paradigm for implementing behavior-based control
that is decentralized, distributed, scalable, and robust
for teams of mobile autonomous systems.
Additionally, we propose that quorum sensing may
be used for ensemble decision-making tasks such as
collective classification in distributed autonomous
sensor platforms.
The increasing availability of autonomous and
unmanned vehicle platforms to military commanders
creates opportunities for the use of autonomous
vehicle teams to enhance situational awareness,
decrease response times, and gain tactical advantage
without increased risk to human life. Teams
composed of fully autonomous systems offer
potential to extend operational capabilities in critical
battlespace domains including the littoral zone,
undersea, space, on the battleground, and in other
challenging and hazardous environments. However,
coordinated command and control (C2) for teams of
195
Sofge D. and Lawless W..
QUORUM SENSING FOR COLLECTIVE ACTION AND DECISION-MAKING IN MOBILE AUTONOMOUS TEAMS .
DOI: 10.5220/0003122501950204
In Proceedings of the 3rd International Conference on Agents and Artificial Intelligence (ICAART-2011), pages 195-204
ISBN: 978-989-8425-40-9
Copyright
c
2011 SCITEPRESS (Science and Technology Publications, Lda.)

autonomous systems operating in complex, dynamic,
partially unknown and potentially hostile
environments offers both technological hurdles as
well as opportunities unique to each battlespace
domain.
In this technical effort quorum sensing is applied
to the development of behavior-based control for a
team of autonomous ground robots (agents) tasked
with searching a field for buried landmines. Each
robot is equipped with one or more sensors for
detecting mines, such as a metal detector,
magnetometer, or ground-penetrating radar. We
assume that the robots have different sensor suites
mounted on them to perform landmine detection,
and thereby may be considered heterogeneous from
a sensing and platform perspective. The goal is to
implement a decentralized control strategy such the
robots must collaborate in order to identify the
mines, while implicitly divvying up the labor
amongst available agents to provide efficient parallel
search.
2 BACKGROUND
AND RELATED WORK
Quorum sensing (QS) can be classified as a
decentralized decision-making process used to
coordinate behavior. The key characteristics of QS
are that each individual (1) senses either directly
(e.g. through molecular concentration) or indirectly
(e.g. by counting the number of interactions it has
with others of its kind) the number or density of its
own kind present, and (2) commences a
predetermined response, such as adopting a specific
behavior, once the quorum decision signal is
triggered. QS may also be part of a collective quality
assessment process, as practiced in ants and
honeybees in selection of new nesting sites. In such
cases the individuals make individual quality
assessments and then share these assessments with
the group.
2.1 QS in Bacteria
Bacteria achieve QS by detecting the density of
other bacteria in the area, and then using this signal
to regulate genes that in turn express behaviors (e.g.
swimming, biofilm construction, pathogenicity). QS
has been observed in many species of bacteria, but
has been studied extensively in only a few including
Vibrio fischeri, responsible for light production
(bioluminescence) in the Hawaiian bobtail squid; in
Escherichia coli (E. coli), which resides in the lower
intestinal tract and is often credited with causing
food poisoning in humans; and most extensively in
Pseudomonas aeruginosa, where QS has been found
to be employed in biofilm formation, swimming, and
cell aggregation.
Bacteria use signaling molecules called
autoinducers to regulate QS. These molecules are
continuously secreted and detected by the bacteria,
forming a kind of communication network within
the colony. Once a specific density threshold of
autoinducer molecules is crossed, behavior changes
are induced through changes in gene expression.
Bacteria also communicate between species,
using a different molecule to communicate than the
one used within their own species (Ng, 2009). It is
estimated that there are 10 times as many bacteria
present in the human body as there are cells within
the body. These bacteria, many species of which
have not yet been identified, play an integral role in
the proper functioning of the human body, while a
few can cause serious and even fatal diseases.
Identifying the chemical signaling mechanisms for
various species of bacteria, both for signaling within
species and between species, is an active and on-
going focus of bacteriology research (Mehta, 2009).
2.2 QS in Ants
While QS has been observed in a variety of social
insects, it has been studied most extensively in
Temnothorax albipennis and Leptothorax albipennis
ants (Pratt, 2002). Ant colonies nest in small
crevices between rocks, or inside small spaces inside
sticks. When the nest is broken, scout ants fan out in
search of a new nesting site. When a promising nest
site is found, the scout ant assesses the quality of the
new site, and returns to the old nest. She waits a
period of time inversely proportional to the quality
of the new site before recruiting nestmates to follow
her to the new nest site, a process called tandem
running.
Ants perform tandem running visiting many
candidate sites, recruiting other ants to visit the site
they have chosen to nominate. While these site
visits, recruiting, and tandem running are taking
place, the ants are sensing the number of encounters
they have with other ants. Once the number of
encounters reaches a threshold a quorum decision is
triggered and all of the ants return to the old nest and
begin carrying the brood, queen, and fellow ants to
the new nest site.
This process represents a more aggressive form
of QS than that employed by bacteria in that the
individuals compete to directly influence the
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
196

outcome of the collective decision, selecting a new
nesting site. The combination of individual site
quality assessment, recruitment, and voting (by their
presence) comprises an ensemble decision process
that provides a means for the colony to quickly and
efficiently find and relocate to a new nesting site.
2.3 QS in Bees
Honeybees (Apis mellifera) are social insects that,
like TA ants, utilize QS to collectively evaluate and
select new nest sites (Seeley, 2004). When a colony
of bees becomes too large, the queen will leave the
hive with a group of workers in order to start a new
hive elsewhere. Once outside the nest, the workers
form a swarm that may attach itself to a log, tree
branch, or other convenient location where it can
rest for a few days. A few of the scouts set off in
search of a nest site to house the new hive.
When a potential site has been found, the scout
assesses the quality in terms of whether or not it is
infested with ants, how protected it is from the
weather, how much sunlight it receives, etc., then
returns to the swarm and performs a waggle dance to
recruit other bees to the site. The number of
repetitions of the dance is proportional to the quality
of the site. Other scouts will fly to the potential new
nesting site and perform their own quality
assessments and recruiting. Once a quorum number
of bees has been reached at the new site they all
return to the swarm and begin a new behavior called
piping, causing the swarm to take off and relocate to
the new nest site.
Bees utilize a similar process to search for new
food sources, including random search, assessment,
waggle dance and recruitment. A search algorithm
called the Bees Algorithm inspired by this process
has been applied to a variety of combinatorial
optimization problems including server allocation
and job shop scheduling (Pham, 2005).
2.4 QS in Computational Intelligence
Quorum sensing clearly has potential for use in
applications of computational intelligence, but it has
surprisingly received little attention per se from the
artificial intelligence community. This may be due
in part to the fact that although QS was discovered
and studied in Vibrio fischeri in the late 1960s, for
many years it was thought to be limited to marine
bacteria such as Vibrio fischeri and Vibrio harveyi.
The extent to which bacteria utilize signaling to
achieve decentralized coordinated action was not
appreciated until recently (Ng, 2009).
A vibrant and expanding area of computational
intelligence research is based on modeling the
behavioral paradigms of social insects and applying
them to groups or teams of autonomous man-made
systems. Ant Colony Optimization (ACO) was
inspired by the movement of ants in locating food
sources, and the optimal paths they establish to
move the food back to the colony. ACO was
proposed by Dorigo (1992) as a search heuristic for
finding an optimal path in a graph, and has spawned
a class of heuristic algorithms for performing
optimization tasks. ACO algorithms may be
considered a subclass of stigmurgic methods
(Bonabeau, 1998) in which agents utilize
communication through the environment. Key
features of ACO algorithms include the use of
pheromones to create paths along which the ants (or
agents) move, and the processes for strengthening
and weakening such paths. ACO algorithms have
been applied to a variety of challenging optimization
tasks including the traveling salesman problem
(Dorigo, 1996), job shop scheduling (Merkle, 2002),
and distributed clustering (Bonabeau, 1998).
QS may be considered a stigmurgic method, but
it is not an ACO algorithm since it doesn’t use
pheromones, it doesn’t adapt agent paths to
gradually improve its solution(s), and the focus of
QS is emergent collaboration to achieve collective
decisions. As such, it would be more appropriate to
categorize QS as a method for distributed multiagent
collaboration rather than as an optimization
technique.
Sahin and Franks (2002) researched the
measurement of spaces by animals, including
Leptothorax albipennis ants, for potential use in
developing behaviors for autonomous mobile robots.
While the ants they studied were utilizing QS for
nest assessment they focused instead on the
mechanism for nest quality assessment, specifically
how they measured the size of the potential new
nesting sites. In their “Future Lines of Research”
section they discuss collective decision-making and
quorum sensing, and suggest exploring the use of
social behavior in complex measurements and
decision-making.
Wokoma (2003) proposed the use of a QS-based
protocol to provide self-organized clustering to
optimize communications routing in distributed
sensor networks. They conclude that the QS-based
protocol is more scalable than a centralized
approach, and can adjust to changes in the
environmental signal and network topology because
there is no dependence on any particular node.
Peysakhov and Regli (2005) proposed a server
QUORUM SENSING FOR COLLECTIVE ACTION AND DECISION-MAKING IN MOBILE AUTONOMOUS TEAMS
197

population management scheme for wireless mobile
ad hoc networks based upon QS, specifically
Leptothorax albipennis ants. They implement a QS
based protocol that automatically rebalances service
availability on server hardware configured as a
wireless server network. They conclude that the
solution exhibits properties of emergent stability,
decentralized control, and resilience to disturbances.
QS can be viewed as a simple form of voting, but
it differs from voting as practiced in ensemble
decision systems and human organizations in that in
QS no overall tally (counting) of votes is required,
the agents involved are necessarily mobile, and the
quorum decision is triggered based upon a density
threshold being exceeded. Related work in voting in
ensemble decision systems is discussed in the next
section.
2.4.1 Ensemble Decision-making
Recent advances in computational intelligence have
produced techniques and algorithms for combining
predictions, estimates, and decisions from multiple
sources, such as expert systems or neural network
models, such that the ensemble decision is at least as
good (and often significantly better) than that of any
one expert or model (Polikar, 2006). In human social
affairs we routinely practice ensemble decision-
making in numerous fora including elections, jury-
trials, product reviews and rankings, medical
treatment decisions (e.g., asking for a second or third
opinion before surgery), talent contests, and
scientific peer review. In the application of both
computational intelligence and human intelligence,
the use of ensemble decision-making allows the
individual to benefit from the knowledge and
experience of the group, and to thereby reduce the
risk of making poor decisions.
Ensemble decision systems (Polikar, 2006) have
been developed that use a population of decision
models to perform collective decision-making. The
strength of this approach is that if the model errors
are uncorrelated, then the overall ensemble decision
will be more accurate. Such systems often apply
voting schemes in which each classifier in the
ensemble is given a set of inputs and “votes” on the
classification. The votes are tallied, and a
combination rule is applied, such as majority or
consensus.
Biological systems such as ant colonies and other
social insect groups routinely demonstrate the ability
to coordinate information and collaborate in large
numbers to solve extremely challenging problems
collectively, such as building a new nest with
hundreds of complex interconnected chambers and
passages, or carrying objects many times the size
and weight of a single individual, despite the lack of
any form of centralized or coordinated planning or
control.
The study of such biological systems has
recently given rise to the field of Swarm Intelligence
(Garnier, 2007), which focuses specifically on the
emergence of intelligence through the interactions of
a large number of individuals, with each acting
according to its own behavioral plan. Swarm-
inspired behavior-based approaches to control of
teams of autonomous systems offer several
advantages over more traditional approaches (e.g.,
linearized optimal control (Robinett, 2010),
including robustness in dynamic environments,
decentralized and fully distributed controls, low
computational complexity (each individual is
executing a simple set of rules or behaviors), and
scalability since only local interactions are
considered (hence there is also no single point-of-
failure for the entire system).
In related efforts for controlling teams of
autonomous ground vehicles and teams of
unmanned air vehicles we utilize a physics-inspired
approach called physicomimetics (artificial physics)
(Spears, 2004; Wiegand, 2006) where vehicles are
modeled as particles, interactions between them are
governed by force laws, and observation goals are
represented by attractors. These techniques will
allow human operators to employ teams of
autonomous vehicles to perform missions and
provide information to enhance situational
awareness without increasing manning requirements
for planning and control of the platforms.
2.4.2 Behavior-based Autonomous Team
Control
In a related effort (Sofge, 2009) we are investigating
planning and navigation for teams of underwater
gliders to improve the accuracy of assimilative
ocean prediction models for undersea warfare. The
ocean environment presents numerous challenges for
unmanned systems such as difficulty communicating
with teammates underwater (increasing the need for
autonomy), difficulty localizing the vehicle
underwater and maintaining accurate positioning
(e.g., inertial navigation systems are highly sensitive
to drift due to currents and other ocean dynamics
and the resultant accumulation of error), and
difficulty controlling highly underactuated systems
such as undersea gliders. The undersea environment
also offers significant advantages for unmanned and
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
198

autonomous systems such as the low likelihood of
colliding with other objects (other than the bottom or
one another); stealth provided by ocean cover;
extended stay times for passive monitoring due to
the low energy need (since gliders use buoyancy
control to move forward, no propellers are required);
emerging technologies for harvesting energy from
the ocean; and long-range propagation of acoustic
signatures for identification.
In other efforts we are developing an information
theoretic approach to optimizing underwater
distributed sensor networks (DSNs), and algorithms
for merging bathymetric datasets (e.g., ocean floor
profiles) that have been collected at various times by
a variety of means including sonar arrays towed by
survey ships, side-scan sonar collected by undersea
vehicles, surveillance aircraft, and even space-based
observing platforms (satellites).
Autonomous sensor networks are under
development or have already been put into operation
for many purposes including weather forecasting
and prediction (Bell, 2010); volcanic gas emissions
monitoring (Galle, 2010); tsunami early-warning
systems (PTWC, 2010); monitoring bridges, tunnels,
pipelines, and other critical structures (Chebrolu,
2008); and for monitoring networking and
communications channels in order to detect possible
activity by terrorists (Lawless, 2010). A key aspect
of all of these networked systems, as well as the
teams of autonomous systems described previously,
is the need to coordinate information flows amongst
the individual members of the team (or within the
network); and to reconcile, fuse or merge, and
integrate the various bits of information streaming in
from disparate sources into a coherent picture for
use by human operators.
3 METHODOLOGY
The goal is to demonstrate that the quorum sensing
paradigm may provide robust decentralized
coordination and collective decision-making for
mobile autonomous teams performing complex
tasks. Quorum sensing is applied to the design of a
decentralized planner for a team of mobile
autonomous agents surveying a field containing
buried landmines. The key features of this approach
are (1) each agent only interacts with its local
environment, thus minimizing communication
requirements and avoiding complexity (and
bandwidth) scaling problems as the number of
agents increases, (2) collaboration between agents is
necessary to accomplish the task, both for collective
decision-making and division of labor, but it is an
emergent property (not explicit), (3) the approach is
robust to variations in the size (and topology) of the
field, number of targets (mines), number of agents,
sensor performance, and quorum size.
While QS is inspired by the behavior of social
insects such as ants, it relies on different
mechanisms than those employed by other artificial
ant algorithms such as ACO (described previously),
and QS is presented as a method to achieve
distributed collaboration and decision-making for a
team of agents, not as an optimization technique.
Therefore no direct comparison of ACO and QS
methods in performing this task was performed. An
ACO-based solution utilizing pheromone trails may
exist, but that is beyond the scope of this study.
Experiments instead focused on validating the QS
approach.
3.1 Operationalizing QS
Our approach to applying QS to a target domain,
such as a search or optimization problem involving
multiple agents, is to first decompose the problem
into two or more distinct phases. Each phase is
characterized by parallel execution of agent
behaviors, with no centralized control of the team.
The first phase is fundamentally a parallel search
by the agents. Each agent must be capable of
performing a quality assessment or recognition of
whatever is being sought.
Next, each agent must have a mechanism for
communicating or expressing its assessment or
recognition. This could be communicated through
the environment with autoinducers in bacteria, or
communicated directly from one agent to another by
ants and bees. Recognition functions as a voting
mechanism in bacteria, while assessment is part of
the recruitment process in social insects. This
communication of assessment is the key to collective
decision-making.
Each agent must also have the ability to trigger
the quorum decision (since we require a distributed,
completely decentralized approach). The quorum
decision must be accepted by each agent. Once the
quorum decision state is accepted, the agent may go
back into another state such as random-walk, or
search, depending upon the task.
3.2 Area Coverage
Using a team of autonomous vehicles to search a
field at first glance appears to be a classic area
coverage problem. Such problems may often be
QUORUM SENSING FOR COLLECTIVE ACTION AND DECISION-MAKING IN MOBILE AUTONOMOUS TEAMS
199

solved efficiently by dividing the space to be
searched amongst the available agents, and having
each agent assume responsibility for covering a
specific area.
In this application, however, this approach will
not work since each agent requires the assistance of
other agents carrying different sensor packages to
confirm the identification of buried mines. A
Brownian-motion type random walk (with a single
random step taken at each time step) would not
make sense either, since the agents would spend an
inordinate amount of time retracing their steps and
revisiting the same places they had just visited.
While many strategies may be devised to address
this problem, we chose to start with a modified
random walk, with “walk-length” determined by the
size of the field and the number of agents. The walk-
length for the agents is determined by dividing the
field length by the number of agents and then
multiplying by three. For example, if the field is
50x50, and there are 10 agents, then the walk-length
will be 15. This gives each agent good field
coverage, but no attempt was made to optimize
walk-length with respect to overall team
performance. Each agent chooses a random direction
to move from its starting position on the grid by
selecting a direction toward one of its 8 neighbors
(standing still is not allowed). For each time step
that passes it will continue in that direction until the
full walk-length has been covered (e.g., 15 steps).
The agents then select another direction at random.
3.3 The Field, Agents and Mines
The field is implemented as a square cellular
toroidal grid (for simplicity) such that each agent
and each mine is located at a specific Cartesian grid
coordinate at each point in time. Both the mines and
the agents are randomly placed on the grid at the
beginning of each run. The agents will move while
the mines will remain in fixed locations throughout
the run.
Agents appear on the grid as small blue circles.
The mines initially appear as small red stars. Each
time an agent “recognizes” a mine, its star grows a
bit larger on the field until the quorum decision
threshold is crossed, at which point it is changed into
a green square (Figure 1).
3.4 Mine Detection
and Quorum Decisions
The QS paradigm requires that each agent must (1)
sense the number (or density) of its own kind, and
(2) commence a predetermined response once a
quorum decision threshold has been crossed. Since it
would be extremely inefficient to have all (or many)
of the agents congregate at each mine, we decided
that only a minimum requisite number (a quorum, by
definition) must visit each mine and mark it as
“recognized”. In addition, a mine can only be
recognized by an agent once. Recognition is a
stochastic process based upon the maximum sensing
range (a length of 3 cells was used for the
experiments), the accuracy of each agent (also a
controlled parameter), and a normally distributed
random number generated for each possible
recognition.
When an agent successfully recognizes a mine,
the mine’s hit-count is incremented. If the hit-count
exceeds the quorum threshold, the mine is
announced as recognized and its icon is converted
from a red star to a green square. The threshold is
the same for all mines and agents, and the requisite
action upon recognition (that is, a mine exceeding
the threshold) is to announce the mine (in an actual
real-world situation the presence and location of the
mine would be broadcast for further investigation
and/or remediation of the mine), and continue
searching for other mines. Once all of the mines are
located the simulation is stopped and the time taken
to find all of the mines is recorded.
3.5 Team Performance and Robustness
The performance of each agent team is measured
based upon the number of simulation time steps
from initialization of landmine and agent positions
until all landmines are recognized by a quorum of
agents. Since the starting positions, random-walk
process, and recognition process are stochastic, each
experiment is repeated 100 times. The number of
time steps required for each run is plotted versus the
variable of interest, along with the median over all
100 runs.
We define robustness as the property that the
QS-inspired search strategy will continue to function
effectively in the presence of changes in the
parameters such as field size, # Agents, Quorum
Number, etc., and that team performance degrades
gracefully with increases in task complexity (e.g. by
increasing number of mines, or decreasing number
of agents). To avoid undue influence by pathological
starting conditions we calculate the 5% trimmed
mean over each 100 runs, shown as the red lines in
Figures 2-6.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
200

Figure 1: Screen shot from Matlab simulation of quorum
sensing-based controller showing agents (blue circles)
searching a 50x50 toroidal grid for landmines. There are
10 mines on the grid and 10 agents. Hidden mines are
shown as red stars, and recognized mines are shown as
green squares.
4 EXPERIMENTS
The focus of the experiments was validation of the
QS approach as a method to achieve distributed
collaboration and decision-making for a team of
agents. It is not presented as an optimization
technique, nor is it suggested that this is the only
distributed algorithm for accomplishing this task.
The efficiency of this algorithm compared with other
fully decentralized approaches is beyond the scope
of this paper. Instead we demonstrate the robustness
of QS with respect to variations in the problem
domain and resources as described.
4.1 Expectations and Hypotheses
Our expectations were that QS could be
operationalized for use in decentralized, distributed
mobile multiagent teams to address challenging
problems in computational intelligence such as
decentralized landmine detection using an
autonomous multi-agent team. We hypothesize that
the QS-based approach will be robust to variations
in many of the variables including:
field size
number of mines
number of agents
sensor performance
quorum size
4.2 Design of Experiments
The experiments were designed to demonstrate the
application of QS to the mine detection task, and to
test the hypotheses specified above. The measure of
performance for the team was the number of
simulation time steps until all of the mines were
recognized (i.e., quorum number reached for every
mine). Each experiment started by randomly
initializing the positions of the mines and the
positions of the agents.
Each experiment was repeated 100 times with a
different set of starting positions each time. The
parameters not being varied were set at the
following nominal values:
Field size: 50x50 # Mines: 10
# Agents: 10 Walk-length: 3*Field size/#Agents
Quorum Number: 3 Sensor Performance: 0.6
Experiment 1: Test robustness of team performance
with respect to variations in field size.
The field was defined as an mXm unit square
toroidal cellular grid. The value of m was varied
from 20 to 100 in steps of 5 units.
Experiment 2: Test robustness of team performance
with respect to variation in the number of mines.
The number of mines was varied from 5 to 25 in
steps of size 1.
Experiment 3: Test robustness of team performance
with respect to variations in the team size (number
of agents).
The number of agents was varied from 5 to 25 in
steps of size 1.
Experiment 4: Test robustness of team performance
with respect to variations in sensor accuracy.
It was assumed that different sensors have different
performance characteristics in recognizing the
mines. The detection of a mine is modeled as a
stochastic process in which sensor accuracy,
distance to the mine, and random chance determine
the outcome. For all experiments the maximum
range for detection was set at 3 units, with the
probability of detection decreasing with distance
according to a normal distribution with mean zero.
The variance of that distribution was determined by
sensor performance parameter psense. The nominal
value of psense for all experiments except for
Experiment 4 was 0.6.
To test the robustness of team performance with
respect to psense, the value of psense was varied
from 0.3 to 1.0 in steps of size 0.1
Experiment 5: Test robustness of team performance
QUORUM SENSING FOR COLLECTIVE ACTION AND DECISION-MAKING IN MOBILE AUTONOMOUS TEAMS
201
with respect to variations in the quorum size (the
number of hits required for a mine to be fully
recognized by the team).
The quorum size was varied from 2 to 5 in steps of
size 1.
5 RESULTS
Figures 2-6 show the results from the Experiments.
Each experiment was repeated 100 times. Each dot
shows time to completion for the team for a single
run; the line shows the 5% trimmed mean
completion times for the team versus the varied
parameter (shown on the x-axis) over 100 runs.
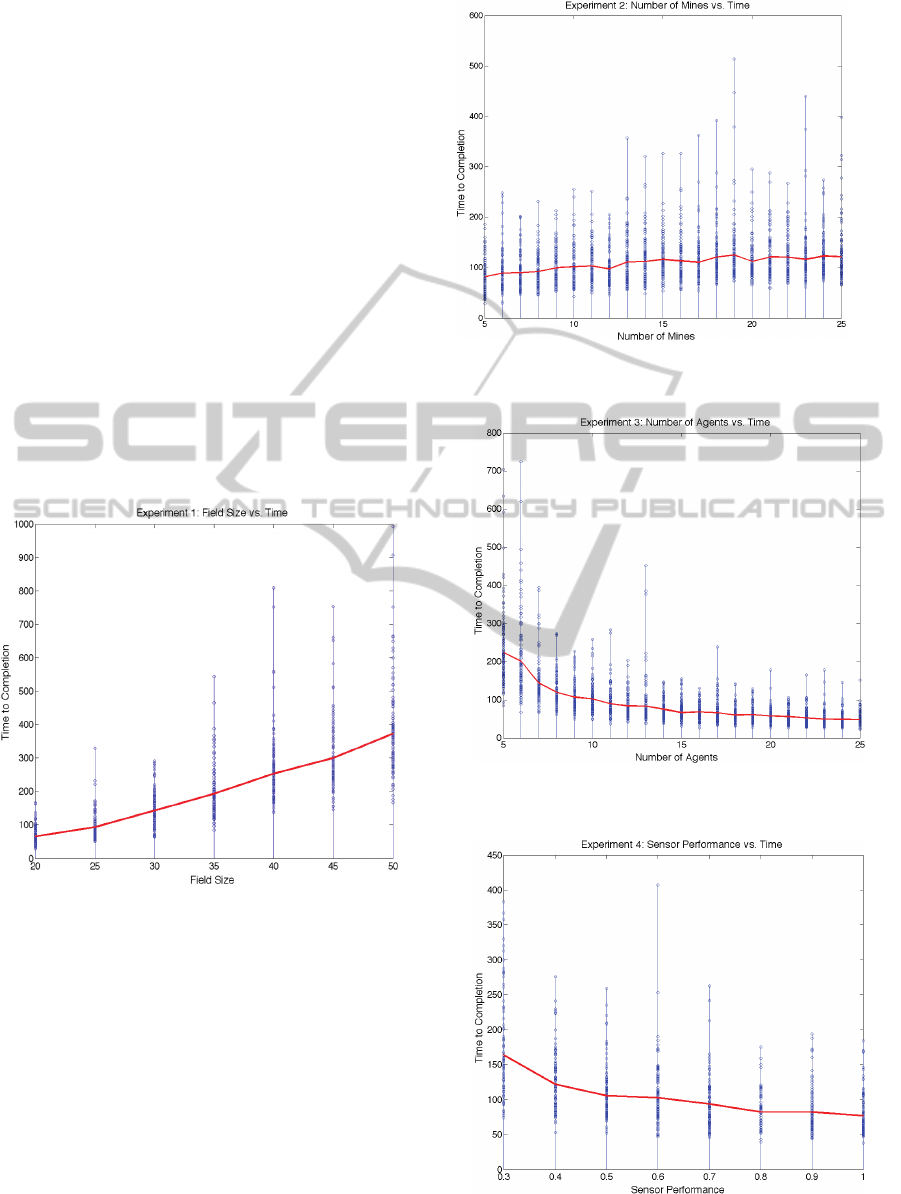
Figure 2 shows that as the field size increases
from 20X20 to 50X50, a 625% increase in area, the
task completion time increases linearly at
approximately the same rate as the increase in area.
This shows that the QS-inspired search technique is
robust to changes in field size.
Figure 2: Experiment 1: Task Completion Time (y-axis)
vs. Field Size (x-axis).
Figure 3 shows that at the number of mines increases
from 5 to 25, the trimmed mean task completion
time also increases at a gradual (roughly linear) rate,
indicating that the technique is robust to changes in
the number of targets.
Figure 4 shows that as the number of agents
increases from 5 to 25, the task completion time
decreases monotonically but non-linearly. This is as
expected, since the number of targets is fixed at 10,
adding additional agents after a certain point will not
substantially reduce the search time. This also shows
that the technique is robust to changes in team size.
Figure 3: Experiment 2: Task Completion Time (y-axis)
vs. Number of Mines (x-axis).
Figure 4: Experiment 3: Task Completion Time (y-axis)
vs. Number of Agents (x-axis).
Figure 5: Experiment 4: Task Completion Time (y-axis)
vs. Sensor Performance (x-axis).
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
202
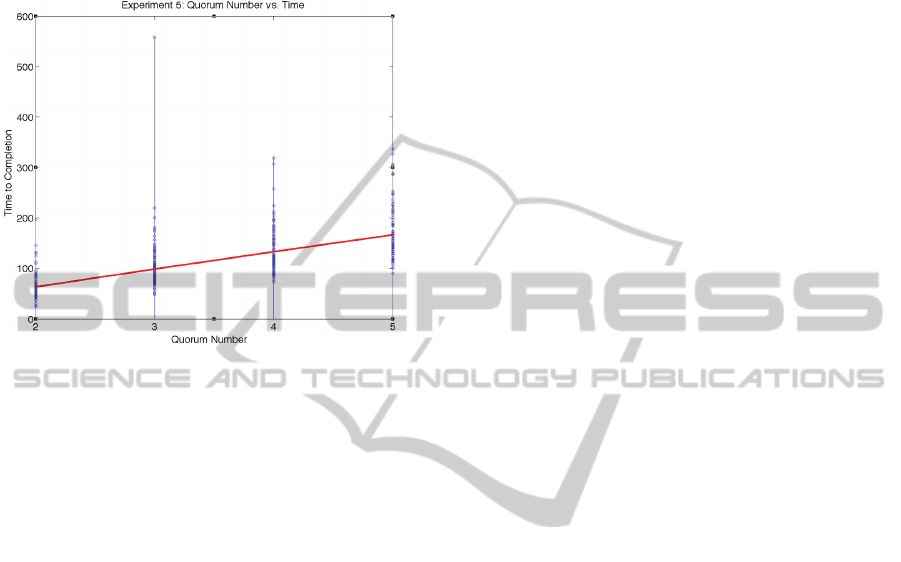
Figure 5 shows that as the sensor performance
increases from 0.3 to 1.0, the mean task completion
time decreases monotonically, indicating that the
technique is robust to changes in sensor
performance.
Figure 6: Experiment 5: Task Completion Time (y-axis)
vs. Quorum Number (x-axis).
Figure 6 shows that as the quorum number
increases from 2 to 5, the mean task completion time
increases linearly and monotonically, indicating that
the technique is robust to changes in quorum
number, the number of collaborators needed to
confirm a decision.
6 CONCLUSIONS
Quorum sensing, a decentralized decision-making
process used by bacteria and by social insects to
coordinate group behavior and to perform collective
decision-making, provides a robust decentralized
team coordination and collective decision-making
paradigm for use in mobile autonomous teams
performing complex tasks. In this effort a quorum
sensing paradigm was used to develop a behavior-
based control strategy for a team of autonomous
mobile robots given the task of surveying a field
containing buried landmines. The quorum sensing-
based search strategy was shown to be robust to
variations in field and team size, number of
landmines, sensor accuracy and quorum size.
7 FUTURE WORK
Quorum sensing offers tremendous potential for
design of robust decentralized control and decision-
making strategies for teams of autonomous systems
and distributed sensing arrays. Mobile autonomous
systems capable of collaboration may provide
significantly enhanced capabilities for recognizing
targets, area search, reconnaissance, and other
critical tasks. Future efforts will focus on refining
QS-inspired approaches to collaborative tasks for
multi-agent teams (such as area search and collective
recognition), implementing these methods on actual
autonomous system hardware, and testing
autonomous teams under real-world conditions. The
form of quorum sensing implemented and studied in
this effort thus far is passive, much like quorum
sensing employed by bacterial colonies, in that the
agents do not practice recruitment to confirm their
classifications. A more advanced form of QS,
Aggressive Quorum Sensing (AQS), akin to that
employed by ants and honeybees, incorporates
recruitment and more behavior states for the agents.
Once an agent makes a successful recognition of a
mine (but still below the quorum threshold), it
begins recruiting other agents to confirm the
recognition. This technique has the potential to
significantly enhance the accuracy of the team on
the mine-clearing task. We will develop AQS and
apply it to the landmine surveying task, comparing
the performance of the AQS-based approach with
that of the QS-based approach described herein.
ACKNOWLEDGEMENTS
This work was performed at the Naval Research
Laboratory and was funded by the US Department
of Defense, Office of Naval Research under the
project titled Heterogeneous Perceptual Sensor
Swarms for Landmine Detection. The views,
positions and conclusions expressed herein reflect
only the authors’ opinions and expressly do not
reflect those of the US Department of Defense,
Office of Naval Research, or the Naval Research
Laboratory.
REFERENCES
Bell, B., 2010. Mobile Meteorological Observation (M2O)
Network. Second AMS Conference on International
Cooperation in the Earth System Sciences and
Services, <http://ams.confex.com/ams/90annual/tech
program/programexpanded_603> {retrieved October
26, 2010}.
Bonabeau, E., Dorigo, M., Theraulaz, G., 1999. Swarm
Intelligence: From Natural to Artificial Systems.
QUORUM SENSING FOR COLLECTIVE ACTION AND DECISION-MAKING IN MOBILE AUTONOMOUS TEAMS
203

Oxford University Press.
Chebrolu, K., Raman, B., Mishra, N., Valiveti, P. K.,
Kumar, R., 2008. BriMon: A Sensor Network System
for Railway Bridge Monitoring. In Proceedings of the
Sixth International Conference on Mobile Systems,
Applications, and Services (MobiSys), Breckenridge,
Colorado.
Dorigo, M., 1992. Optimization, Learning and Natural
Algorithms. PhD thesis, Politecnico di Milano, Italie.
Dorigo, M., V. Maniezzo, V., Colorni, A., 1996. Ant
System: Optimization by a colony of cooperating
agents. In IEEE Transactions on Systems, Man, and
Cybernetics – Part B, 26:1:29–41, IEEE.
Galle, B., Johansson, M., Rivera, C., Zhang, Y., Kihlman,
M., Kern, C., Lehmann, T., Platt, U., Arellano, S.,
Hidalgo, S., 2010. Network for Observation of
Volcanic and Atmospheric Change (NOVAC)—A
global network for volcanic gas monitoring: Network
layout and instrument description. In J. Geophysical
Research 115, D05304.
Garnier, S., Gautrais, J., Theraulaz, G., 2007. The
Biological Principles of Swarm Intelligence. In Swarm
Intelligence, 1:3–31, Springer.
Lawless, W. F., Rifkin, S., Sofge, D., Hobbs, S.,
Angjellari-Dajci, F., Chaudron, L., Wood, J., 2010.
Conservation of Information (COI): Reverse
Engineering Dark Social Systems (DSS). In Structure
and Dynamics: eJournal of Anthropological and
Related Sciences, University of California
eScholarship Repository.
Mehta, P., Goyal, S., Long, T., Bassler, B., Wingreen, N.,
2009. Information processing and signal integration in
bacterial quorum sensing. In Molecular Systems
Biology, 5:325.
Merkle, D., Middendorf, M., Schmeck, H., 2002. Ant
colony optimization for resource-constrained project
scheduling. In IEEE Transactions on Evolutionary
Computation, 6:4:333–346, IEEE.
Ng, W., Bassler, B., 2009. Bacterial Quorum-Sensing
Network Architectures. In Annual Review of Genetics,
43:197–222.
OSD, 2009. 2009-2034 Unmanned Systems Integrated
Roadmap. U.S. Office of the Secretary of Defense.
Peysakhov, M., Regli, W., 2005. Ant inspired server
population management in a service based computing
environment. In Proceedings Swarm Intelligence
Symposium, pp. 357–364, IEEE.
Pham, D. T., Ghanbarzadeh, A., Koc, E., Otri, S., Rahim,
S., Zaidi, M., 2005. The Bees Algorithm. Technical
Note, Manufacturing Engineering Centre, Cardiff
University, UK.
Polikar, R., 2006. Ensemble based systems in decision
making. In IEEE Circuits and Systems Magazine,
6:21–45, IEEE.
Pratt, S., Mallon, E., Sumpter, D., Franks, N., 2002.
Quorum Sensing, Recruitment, and Collective
Decision-Making During Colony Emigration by the
Ant Leptothorax Albipennis. In Behavioral Ecology
Sociobiology, 52:117–131, Springer-Verlag.
PTWC (The Pacific Tsunami Warning Center), The
Tsunami Warning System <http://www.geophys.wash
ington.edu/tsunami/general/warning/warning.html#ov
erview> {retrieved October 26, 2010}.
Robinett, R. III, Wilson, D., 2010. Hamiltonian surface
shaping with information theory and exergy/entropy
control for collective plume tracing. In International
Journal of Systems, Control and Communications,
2:1–3:144–169, InderScience Publishing.
Sahin, E., Franks, N., 2002. Measurement of space: From
ants to robots. In Proceedings of WGW 2002:
EPSRC/BBSRC International Workshop Biologically-
Inspired Robotics: The Legacy of W. Grey Walter, pp.
241–247, Bristol, UK.
Seeley, T., P. Visscher, 2004. Quorum Sensing During
Nest-Site Selection by Honeybee Swarm. In
Behavioral Ecology Sociobiology, 56:594–601,
Springer-Verlag.
Sofge, D., Harper, M., 2009. Autonomous Route Planning
and Navigation for UxV Teams. ONRG Workshop on
Machine Intelligence for Autonomous Operations,
Lerici, Italy.
Spears, W., Spears, D., Hamann, J., Heil, R., 2004.
Distributed, Physics-Based Control of Swarms of
Vehicles. In Autonomous Robots, 17:2–3:137–162,
Springer Netherlands.
Wiegand, R., Potter, M., Sofge, D., Spears, W., 2006. A
Generalized Graph-Based Method for Engineering
Swarm Solutions to Multiagent Problems. In Parallel
Problem Solving from Nature - PPSN IX, Lecture
Notes in Computer Science, pp. 741–750, Springer-
Berlin.
Wokoma, I., Sacks, L., Marshall, I., 2003. Clustering in
Sensor Networks using Quorum Sensing. In London
Communications Symposium, University College
London.
ICAART 2011 - 3rd International Conference on Agents and Artificial Intelligence
204
