
COOPERATIVE TELEOPERATION TASK IN VIRTUAL
ENVIRONMENT
Influence of Visual Aids and Oral Communication
Sehat Ullah, Samir Otmane and Malik Mallem
IBISC Laboratory, University of Evry, 40 rue de Pelvoux, Evry, France
Paul Richard
LISA Laboratory, University of Angers, 62 av Notre Dame du Lac, France
Keywords:
CVEs, Cooperative teleoperation, Parallel robots, SPIDAR, Human performance, Multimodal feedback.
Abstract:
Cooperative virtual environments, where users simultaneously manipulate objects, is one of the subfields of
Collaborative virtual environments (CVEs). In this paper we simulate the use of two string based parallel
robots in cooperative teleoperation task, Two users setting on separate machines connected through local net-
work operate each robot. In addition, the article presents the use of sensory feedback (i.e shadow, arrows and
oral communication) and investigates their effects on cooperation, presence and users performance. Ten vol-
unteers subject had to cooperatively perform a peg-in-hole task. Results revealed that shadow has a significant
effect on task execution while arrows and oral communication not only increase users performance but also
enhance the sense of presence and awareness. Our investigations will help in the development of teleoperation
systems for cooperative assembly, surgical training and rehabilitation systems.
1 INTRODUCTION
A CVE is a computer generated world that enables
people in local/remote locations to interact with syn-
thetic objects and representations of other participants
within it. The applications of such environments are
in military training, telepresence, collaborative de-
sign and engineering and entertainment. Interaction
in CVE may take one of the following form (Otto
et al., 2006): Asynchronous: It is the sequential ma-
nipulation of distinct or same attributes of an object,
for example a person changes an object position, then
another person paints it. Another example is, if a per-
son moves an object to a place, then another person
moves it further.
Synchronous: It is the concurrent manipulation of dis-
tinct or the same attributes of an object, for example
a person is holding an object while another person is
painting it, or when two or many people lift or dis-
place a heavy object together.
In order to carry out a cooperative task efficiently,
the participants need to feel the presence and actions
of others and have means of communication with each
other. The communication may be verbal or non ver-
bal such as pointing to, looking at or even through
gestures or facial expressions. We implement the VE
designed for cooperative work in replicated architec-
ture and seek solution to network load/latency and
consistency in unique way. Similarly to make cooper-
ative work easier and intuitive we augment the envi-
ronment with audio and visual aids. Moreover we in-
vestigate the effect of these sensory feedback on user
performance in a peg-in-hole task.
This section is followed by the related work, Sec-
tion 3 describes the proposed system. Section 4 dis-
cusses the experiment and results analysis. Section 5
is dedicated to conclusion future work.
2 RELATED WORK
A lot of work has already been done in the field
of CVE, for example MASSIVE provides a collabo-
rative environment for teleconferencing (Greenhalgh
and Benford, 1995). Most of this collaborative work
is pertinent to the general software sketch and the un-
derlying network architecture (Chastine et al., 2005;
Shirmohammadi and Georganas, 2001). Basdogan
et al. have investigated the role of force feedback
in cooperative task. They connected two monitors
374
Ullah S., Otmane S., Mallem M. and Richard P.
COOPERATIVE TELEOPERATION TASK IN VIRTUAL ENVIRONMENT - Influence of Visual Aids and Oral Communication.
DOI: 10.5220/0002166703740377
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics (ICINCO 2009), page
ISBN: 978-989-674-000-9
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved

and haptic devices to a single machine (Basdogan
et al., 2001). Similarly, Eva-lotta et al. have reported
the effect of force feedback over presence, awareness
and task performance in a CVE. They connected two
monitors and haptic devices to a single host (Sall-
nas et al., 2000). Other important works that support
the cooperative manipulation of objects in a VE in-
clude (Jordan et al., 2002; Alhalabi and Horiguchi,
2001) but all theses systems require heavy data ex-
change between two nodes to keep them consistent.
Visual and auditory substitution has already been
used both in single user VR and teleoperation systems
to provide pseudohaptic feedback. The sensory sub-
stitution may be used as a redundant cue, due to lack
of appropriate haptic device or to avoid the possible
instabilities in case of real force feedback (Richard
et al., 1996).
3 DESCRIPTION OF THE
SYSTEM
We present our system that enables two remote users(
connected via LAN), to cooperatively manipulate
virtual objects using string based parallel robots in
the VE. In addition we present the use of visual
(shadow and arrows) aids and oral communication to
facilitate the cooperative manipulation.
Figure 1: Illustration of the virtual environment.
The VE for cooperative manipulation has a simple
cubic structure, consisting of three walls, floor and
ceiling. Furthermore the VE contains four cylinders
each with a distinct color and standing lengthwise in
a line. In front of each cylinder at some distance there
is a torus with same color. We have modeled two SP-
IDAR (3DOF) to be used as robots (Richard et al.,
2006)(see figure 1). At each corners of the cube a
motor for one of the SPIDAR has been placed. The
end effectors of the SPIDARs have been represented
by two spheres of distinct color. Each end effector
Figure 2: Illustration of the appearance of arrow.
uses 4 wires (same in color) for connection with its
corresponding motors.
We use two spheres which are identic in size but
different in colors (one is red and the other is blue)
to represent the two users. Each pointer controls the
movements of an end effector. Once a pointer col-
lides with its corresponding end effector, the later will
follow the movements of the former. In order to lift
and/or transport a cylinder the red end effector will
always rest on right and blue on left of the cylinder.
3.1 Use of Visual Aid and Oral
Communication in Cooperative
Work
Cooperative work is really a challenging research
area, for example the co-presence and awareness
about collaborator’s actions is essential. Similarly the
cooperating persons should also have some feedback
to know, when they can start together, or if there is
some interruption during task. For this purpose we
exploit visual(arrow and shadow) feedback and oral
communication.
If any user moves to touch a cylinder on its proper
side, an arrow appears pointing in the opposite direc-
tion of the force applied by the end effector. The
arrow indicates the collision between an end effec-
tor and cylinder. Similarly during the transportation,
if any user looses control of the cylinder, his/her ar-
row will disappear and the cylinder will stop moving.
Here the second user will just wait for the first one to
come back in contact with the cylinder. It means that
the two users will be aware of each other’s status via
arrows during task accomplishment.(see figure 2)
In order to have the knowledge of perspective po-
sitions of various objects in the VE, we make use of
shadow (see figure 1) for all objects in the environ-
ment. The shadows not only give information about
the two end effector’s contact with cylinder but also
provide feedback about the cylinder’s position with
COOPERATIVE TELEOPERATION TASK IN VIRTUAL ENVIRONMENT - Influence of Visual Aids and Oral
Communication
375
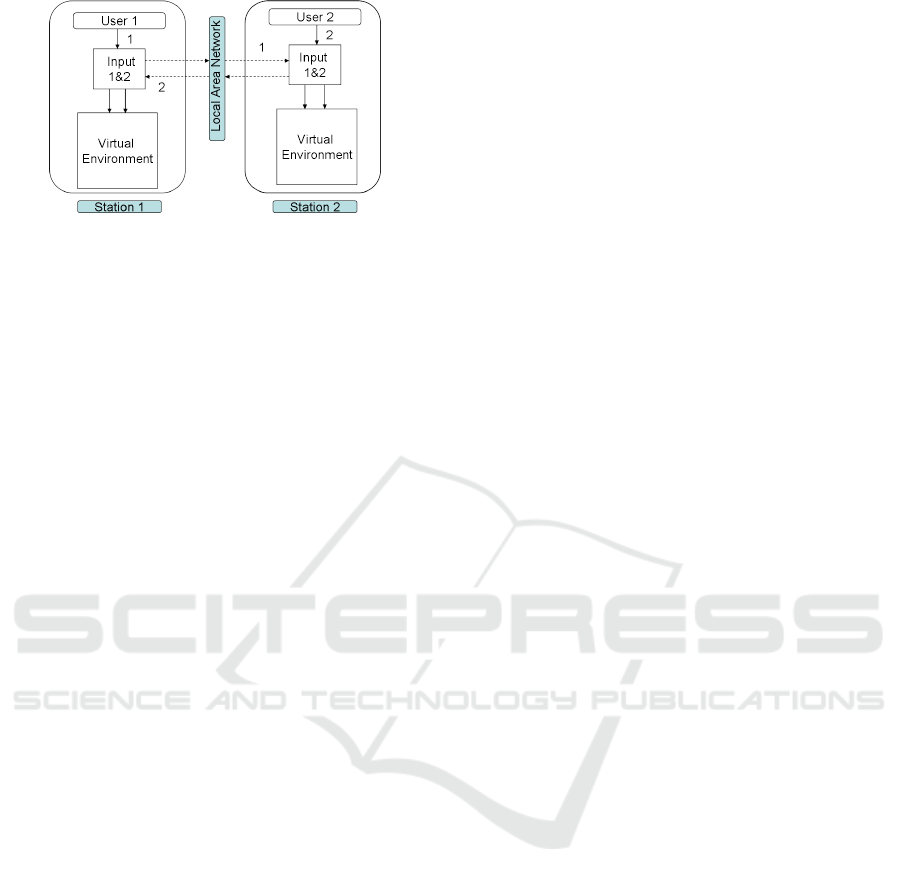
Figure 3: Illustration of the framework of cooperative vir-
tual environment.
respect to its corresponding torus during transporta-
tion.
Normally human beings frequently make use of
oral communication while performing a collaborative
or/and cooperative task. In order to accomplish the
cooperative work in a more natural manner, we in-
clude a module for oral communication in our system.
For this purpose we use TeamSpeak software that al-
lows the two users to communicate over the network
using a headphone equipped with microphone (tea, ).
3.2 Framework for Cooperative VE
The framework plays a very important role in the suc-
cess of collaborative and/or cooperative VEs. We use
a complete replicated approach and install the same
copy of the VE on two different machines. As the fig-
ure 3 depicts each VR station has a module which ac-
quires the input from the local user. This input is not
only applied to the local copy of the VE, but is also
sent to the remote station. It means that a single user
simultaneously controls the movement of two point-
ers (in our case a sphere) at two different stations, so
if this pointer triggers any event at one station, it is
also simultaneously applied at other station. In order
to have reliable and continuous bilateral streaming be-
tween the two stations, we use a peer-to-peer connec-
tion over TCP protocol. Here it is also worth mention-
ing that the frequently exchanged data between the
two stations is the position of the two pointers where
each is controlled by a user.
3.3 Experimental Setup
We installed the software on two pentium 4 type per-
sonal computers connected through Local network.
Each machine had processor of 3GHZ and 1GB mem-
ory. Each system is equipped with standard graphic
and sound cards. Both the systems used 24 inch plate
LCD tv screen for display. Similarly each VR system
is equipped with a patriot polhemus (pat, ) as input
device. The software was developed using C++ and
OpenGL Library.
4 EXPERIMENTATION
4.1 Procedure
Ten volunteers including five male and five female
participated in the experimentations. They were mas-
ter and PhD students. All the participants performed
the experiment with same person who was expert of
the domain and also of proposed system. They were
given a pre-trial in which they experienced all feed-
back. The users needed to start the application on
their respective machines. After the successful net-
work connection between the two computer the user
could see the two spheres (red and blue) as well as the
two end effector of SPIDARs on their screens. See-
ing the two spheres they were required to bring their
polhemus controlled spheres in contact with their re-
spective end effectors (i.e red+red and blue+blue ).
The red sphere was assigned to the expert while the
subjects were in charge of the blue one. In order to
pickup the cylinder the expert needs to touch it from
right while the subject should rest on its left. The
experiment was carried out under the following four
conditions. C1= only shadow, C2= shadow + arrows,
C3= shadow + arrows + oral communication, C4= No
aid All the ten groups performed the experiment us-
ing distinct counter balanced combinations of the four
conditions. We recorded the task completion time for
each cylinder. The time counter starts for a cylinder
once the two end effectors have an initial contact with
it, and stops when it is properly placed in the torus.
4.2 Task
The task was to cooperatively pick up a cylinder and
put it into the torus. The users were required to place
all the cylinder in their corresponding toruses in a sin-
gle trial. Each group performed exactly four trials un-
der each condition. The order of selection was also
the same for all groups i.e to start from the red, go on
sequentially and finish at yellow.
4.3 Task Completion Time
For task completion time the ANOVA (F(3,9)= 16.02,
p < 0.005) is significant. Comparing the task comple-
tion time of C1 and C2, We have 30.07 sec (std 6.17)
and 22.39 sec (std 3.10) respectively with a signifi-
cant ANOVA. This result shows that arrow has an in-
fluence on task performance. Similarly comparing C4
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
376
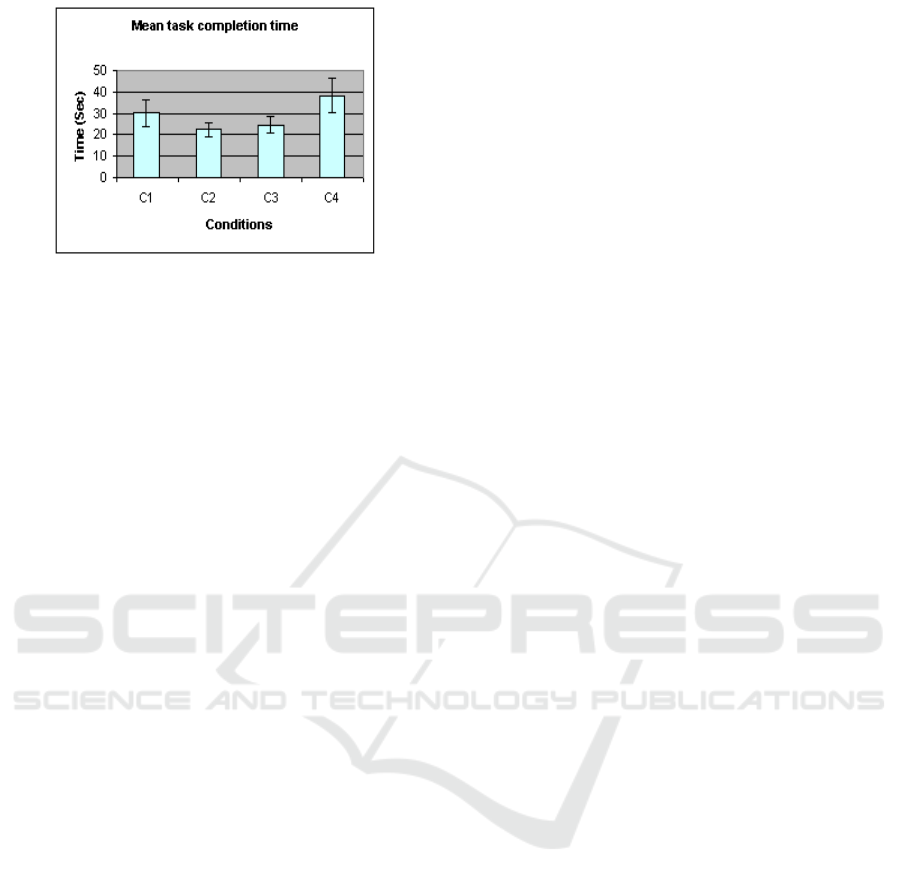
Figure 4: Task completion time under various conditions.
(mean 38.31 sec , std 7.94) with C1 also gives signif-
icant ANOVA. This indicates that only ”shadow” as
compare to ”No aid” also increases user performance.
Now we compare the mean 22.39 sec (std 3.10) of
C2 with that of C3 (24.48 sec std 3.93), the ANOVA
result is not significative. It shows that users had al-
most the same level of performance under C2 and C3.
On the other hand the comparison of C2, C3 with C4
(mean 38.31 sec , std 7.94) both have statistically sig-
nificant results (see figure 4).
5 CONCLUSIONS
In this paper we simulate the use of two string based
parallel robots in cooperative teleoperation task, two
users setting on two separate machines connected
through local network operated each robot. In addi-
tion the article proposed the use of sensory feedback
(i.e shadow, arrows and oral communication) and in-
vestigated their effects on cooperation, co-presence
and users performance. We observed that visual cues
(arrows and shadow) and oral communication greatly
helped users to cooperatively manipulate objects in
the VE. These aids,specially arrows and oral commu-
nication also enabled the users to perceive each others
actions. Our investigations will help in the develop-
ment of teleoperation systems for cooperative assem-
bly, surgical training and rehabilitation systems. Fu-
ture work may be carried out to integrate the modality
of force feedback.
REFERENCES
www.polhemus.com.
www.teamspeak.com/.
Alhalabi, M. O. and Horiguchi, S. (2001). Tele-handshake:
A cooperative shared haptic virtual environment. in
Proceedings of EuroHaptics, pages 60–64.
Basdogan, C., Ho, C.-H., Srinivasan, M. A., and Slater, M.
(2001). Virtual training for a manual assembly task.
In Haptics-e, volume 2.
Chastine, J. W., Brooks, J. C., Zhu, Y., Owen, G. S., Har-
rison, R. W., and Weber, I. T. (2005). Ammp-vis: a
collaborative virtual environment for molecular mod-
eling. In VRST ’05: Proceedings of the ACM sympo-
sium on Virtual reality software and technology, pages
8–15, New York, NY, USA. ACM.
Greenhalgh, C. and Benford, S. (1995). Massive: a col-
laborative virtual environment for teleconferencing.
ACM Transactions on Computer Human Interaction,
2(3):239–261.
Jordan, J., Mortensen, J., Oliveira, M., Slater, M., Tay,
B. K., Kim, J., and Srinivasan, M. A. (2002). Col-
laboration in a mediated haptic environment. The 5th
Annual International Workshop on Presence.
Otto, O., Roberts, D., and Wolff, R. (2006). A review on ef-
fective closely-coupled collaboration using immersive
cve’s. In VRCIA ’06: Proceedings of the 2006 ACM
international conference on Virtual reality continuum
and its applications, pages 145–154. ACM.
Richard, P., Birebent, G., Coiffet, P., Burdea, G., Gomez,
D., and Langrana, N. (1996). Effect of frame rate
and force feedback on virtual object manipulation.
PRESENCE : Massachusetts Institute of Technology,
5(1):95–108.
Richard, P., Chamaret, D., Inglese, F.-X., Lucidarme, P.,
and Ferrier, J.-L. (2006). Human-scale virtual envi-
ronment for product design: Effect of sensory sub-
stitution. International Journal of Virtual Reality,
5(2):3744.
Sallnas, E.-L., Rassmus-Grohn, K., and Sjostrom, C.
(2000). Supporting presence in collaborative environ-
ments by haptic force feedback. ACM Trans. Comput.-
Hum. Interact., 7(4):461–476.
Shirmohammadi, S. and Georganas, N. D. (2001). An end-
to-end communication architecture for collaborative
virtual environments. Comput. Netw., 35(2-3):351–
367.
COOPERATIVE TELEOPERATION TASK IN VIRTUAL ENVIRONMENT - Influence of Visual Aids and Oral
Communication
377
