
A TARGET TRACKING ALGORITHM BASED ON ADAPTIVE
MULTIPLE FEATURE FUSION
Hongpeng Yin, Yi Chai
College of Automation, Chongqing University, Chongqing City, 400030, China
Simon X. Yang
School of Engineering, University of Guelph, Guelph, Ontario, N1G 2W1, Canada
David K. Y. Chiu
Dept. of Computing and Information Science, Univ. of Guelph, Guelph, ON, N1G 2W1, Canada
Keywords:
Target tracking, Feature fusion, Template update, Kernel-based tracking.
Abstract:
This paper presents an online adaptive multiple feature fusion and template update mechanism for kernel-based
target tracking. According to the discrimination between the object and background, measured by two-class
variance ratio, the multiple features are combined by linear weighting to realize kernel-based tracking. An
adaptive model-updating mechanism based on the likelihood of the features between successive frames is
addressed to alleviate the mode drifts. In this paper, RGB colour features, Prewitt edge feature and local
binary pattern (LBP) texture feature are employed to implement the scheme. Experiments on several video
sequences show the effectiveness of the proposed method.
1 INTRODUCTION
Visual tracking is a common task in computer vi-
sion and play key roles in many scientific and en-
gineering fields. Various applications ranging from
video surveillance, human computer interaction, traf-
fic monitoring to video analysis and understanding,
all require the ability to track objects in a complex
scene. Many powerful algorithms for target tracking
have yielded two decades of vision research. Frame
difference and adaptive background subtraction com-
bined with simple data association techniques can ef-
fectively track in real-time for stationary cameras tar-
get tracking (Collins et al., 2001; Shalom and Fort-
mann, 1988; Stauffer and Grimson, 1995). Opti-
cal flow methods using the pattern of apparent mo-
tion of objects, surfaces and edges in a visual scene
caused by the relative motion between the camera and
scene. These methods can achieve the target tracking
in the stationary cameras scene and the mobile cam-
eras scene (Barron and Fleet, 1994; Tal and Bruck-
stein, 2008). Modern appearance-based methods us-
ing the likelihood between the tracked target appear-
ance describe model and the reference target appear-
ance describe model can achieve the target tracking
without prior knowledge of scene structure or camera
motion. Modern appearance-based methods include
the use of flexible template models (Wang and Yaqi,
2008; Mattews et al., 2004) and kernel-based meth-
ods that track nonrigid objects used colour histograms
(Comaniciu and Meer, 2002; Comaniciu et al., 2003;
Li et al., 2008). Particle filter and Kalman filter are
using to achieve more robust tracking of manoeuvring
objects by introducing statistical models of object and
camera motion (Comaniciu et al., 2003; Pan et al.,
2008; Chang et al., 2008; Maggio et al., 2007).
The major difficulty in target tracking based on
computer vision is the variation of the target appear-
ance and its background. By using a stationary cam-
era, the background in a long image sequence is dy-
namic. However, the performance of a tracker can
be improved by using an adaptive tracking scheme
and multiple features. The basic ideal is online adap-
tive selection of appropriate features for tracking. Re-
cently, several adaptive tracking algorithms (Collins
et al., 2005; Wang and Yaqi, 2008; Wei and Xiaolin,
5
Yin H., Chai Y., Yang S. and Chiu D. (2009).
A TARGET TRACKING ALGORITHM BASED ON ADAPTIVE MULTIPLE FEATURE FUSION.
In Proceedings of the 6th International Conference on Informatics in Control, Automation and Robotics - Intelligent Control Systems and Optimization,
pages 5-12
DOI: 10.5220/0002154300050012
Copyright
c
SciTePress

2007; Dawei and Qingming, 2007; Zhaozhen et al.,
2008)were proposed. Collins et al. proposed to on-
line select discriminative tracking features from lin-
ear combination of RGB values (Collins et al., 2005).
The two-class variance ratio is used to rank each fea-
ture by how well it separates the sample distributions
of object and background. Top N features that have
the greatest discrimination are selected to embed in
a mean-shift tracking system. This approach,however
only considers the RGB colour features. Actually,this
approach is one feature-based tracking. Furthermore,
it lacks an effective model update method to copy
with the model drifts. Liang et al. extend the work of
Collins et al. by introducing adaptive feature selection
and scale adaptation (Dawei and Qingming, 2007). A
new feature selection method based on Bayes error
rate is proposed. But how to deal with the model drifts
is not addressed in this paper. He et al. used a cluster-
ing method to segment the object tracking according
to different colours, and generate a Gaussian model
for each segment respectively to extract the colour
feature (Wei and Xiaolin, 2007). Then an appropri-
ate model was selected by judging the discrimination
of the features. The Gaussian model however, not al-
ways fit each segment in practise. Recently, Wang
and Yagi extended the standard mean-shift tracking
algorithm to an adaptive tracker by selecting reliable
features from RGB, HSV, normalized RG colour cues
and shape-texture cues, according to their descriptive
ability (Wang and Yaqi, 2008). But only two best dis-
criminate features are used to represent the target. It
dose not use fully all the features information it has
computed and has a high time complexity.
A key issue addressed in this work is an online,
adaptive multiple-feature fusion and template-update
mechanism for target tracking. Based on the theory
of biologically visual recognition system, the main vi-
sual information comes from the colour feature, edge
feature and the texture feature (Thomas and Gabriel,
2007; Jhuang et al., 2007; Bar and Kassam, 2006). In
this paper, RGB colour features, Prewitt edge feature
and local binary pattern (LBP) texture feature are em-
ployed to implement the scheme. Target tracking is
considered as a local discrimination problem with two
classes: foreground and background. Many works
have point the features that best discriminate between
object and background are also best for tracking per-
formance (Collins et al., 2005; Thomas and Gabriel,
2007; Jhuang et al., 2007). In this paper the tracked
target is represented by a fused feature. According
to the discriminate between object and background
measured by two-class variance ratio, the multiple
features are combined by linear weighting to realize
kernel-based tracking. As model drafts, better perfor-
mance could be achieved by using a novel up-dating
strategy that takes into account the similarity between
the initial and current appearance of the target. Each
feature’s similarity is computed. The high similarity
features are given a big weight and the low similar-
ity features are given a small weight. A good feature
for tracking is a steady feature across the consecu-
tive frames. The target update model is updated by
re-weighting the multiple features based on the sim-
ilarity between the initial and current appearance of
the target. The proposed approach is shown as Figure
1.
The paper is organized as follows. Section 2
presents a brief introduction the feature extraction.
Section 3 presents our proposed approach for target
tracking. Computer simulation and results compared
with related work are presented in Section 4. Con-
cluding remarks are given in Section 5.
2 FEATURE EXTRACTION
It is important to decide what kinds of features are
used before constructing the feature fusion mecha-
nism. In Collins et al. (2005), the set of candi-
date features is composed of linear combination of
RGB pixel. In Wang and Yaqi (2008), colour cue
and shape-texture cues are employed to describe the
model of the target. In this paper based on the theory
of biologically visual recognition system (Thomas
and Gabriel, 2007; Jhuang et al., 2007; Bar and Kas-
sam, 2006), RGB colour features, Prewitt edge fea-
ture and local binary pattern (LBP) texture feature are
employed to implement the scheme.
2.1 RGB Colour Feature
Colour information is an important visual feature.
That is robust to the target rotary, non-rigid trans-
formation and target shelter, widely used in the ap-
pearance model-based visual application. In this pa-
per, colour distributions are represented by colour his-
tograms, and RGB colour space as a very common
colour space is used in this paper. The R, G and
B channels are quantized into 256 bins, respectively.
The colour histogram, calculated using Epanechnikov
kernel, is applied (Comaniciu and Meer, 2002)(Co-
maniciu et al., 2003).
2.2 Prewitt Edge Feature
The edge information is the most fundamental char-
acteristic of images. It is also included useful infor-
mation for target tracking. There are many methods
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
6
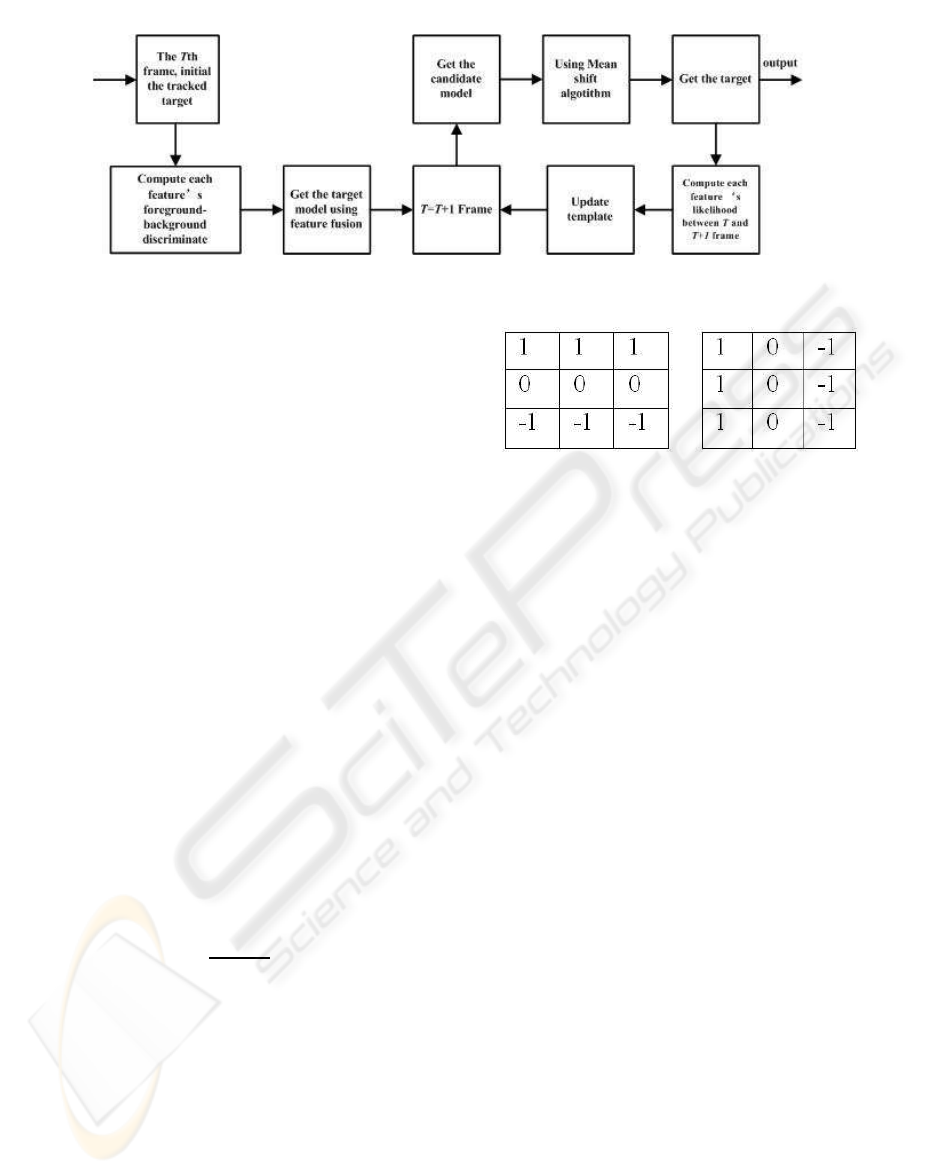
Figure 1: The Flow chart of the purposed approach.
for edge detection, but most of them can be grouped
into two categories: search-based and zero-crossing
based. The search-based methods detect edges by first
computing a measure of edge strength, usually a first-
order derivative expression, such as the gradient mag-
nitude; and then searching for local directional max-
ima of the gradient magnitude using a computed esti-
mate of the local orientation of the edge, usually the
gradient direction (Yong and Croitoru, 2006; Shar-
ifi et al., 2002). The zero-crossing based methods
search for zero crossings in a second-order derivative
expression computed from the image, in order to find
edges, usually the zero-crossings of the Laplacian or
the zero-crossings of a non-linear differential expres-
sion (Sharifi et al., 2002).
In this paper, Prewitt operator is employed to get
the edge feature. For its low computational complex-
ity and high performance. Prewitt operator has two
convolution kernels as shown in Figure 2. Images
of each point are used for the convolution kernel, the
first kernel usually corresponding to the largest verti-
cal edge, and the second corresponding to the largest
horizontal edge. The maximum values of each point
convoluted with the two kernels are accepted. Con-
volution is admitted as output value; results of oper-
ations are edge images. The Prewitt operator can be
defined as
S
p
=
q
d
2
x
+ d
2
y
, (1)
d
x
=[ f(x−1,y−1) + f(x,y−1) + f(x+ 1,y−1)]−
[ f(x−1,y+ 1) + f(x,y+ 1) + f(x+ 1,y+ 1)],
(2)
d
y
=[ f(x+ 1,y−1) + f(x+ 1, y) + f(x+ 1,y+ 1)]−
[ f(x−1,y−1) + f(x−1, y) + f(x−1,y+ 1)].
(3)
The histogram is used to represent the edge fea-
ture. Prewitt edge is also quantized into 256 bins
Epanechnikov kernel like colour feature.
Figure 2: The two convolution kernel of Prewitt.
2.3 LBP Texture Feature
Local Binary Patterns (LBP) is basically a fine-scale
descriptor that captures small texture details. It is
also very resistant to lighting changes. LBP is a
good choice for coding fine details of facial appear-
ance and texture (T and T, 2007)(Aroussi and Mo-
hamed, 2008)(Ojala et al., 1996). The Local Binary
Patterns operator is introduced as a means of sum-
marizing local gray-level structure by Ojiala in 1996
(Ojala et al., 1996). The operator takes a local neigh-
bourhood around each pixel, thresholds the pixels of
the neighbourhood at the value of the central pixel,
and uses the resulting binary-valued image patch as a
local image descriptor. It was originally defined for
3*3 neighbourhoods, given 8 bit codes based on the
8 pixels around the central one. Formally, the LBP
operator takes the form
LBP(x
k
,y
k
) =
7
∑
n=0
2
n
S(i
n
−i
k
), (4)
S(u) =
(
1, u ≥ 0,
0, u < 0,
(5)
where in this case n runs over the 8 neighbours of the
central pixel k, i
k
and i
n
are the gray-level values at
k and n, and S(u) is 1 if u ≥ 0 and 0 otherwise. The
LBP encoding process is illustrated in Figure 3.
In methods that turn LBPs into histograms, the
number of bins can be reduced significantly by as-
signing all non-uniform patterns to a single bin, often
without losing too much information. In this paper, it
is quantized into 256 bins with Epanechnikov kernel.
A TARGET TRACKING ALGORITHM BASED ON ADAPTIVE MULTIPLE FEATURE FUSION
7
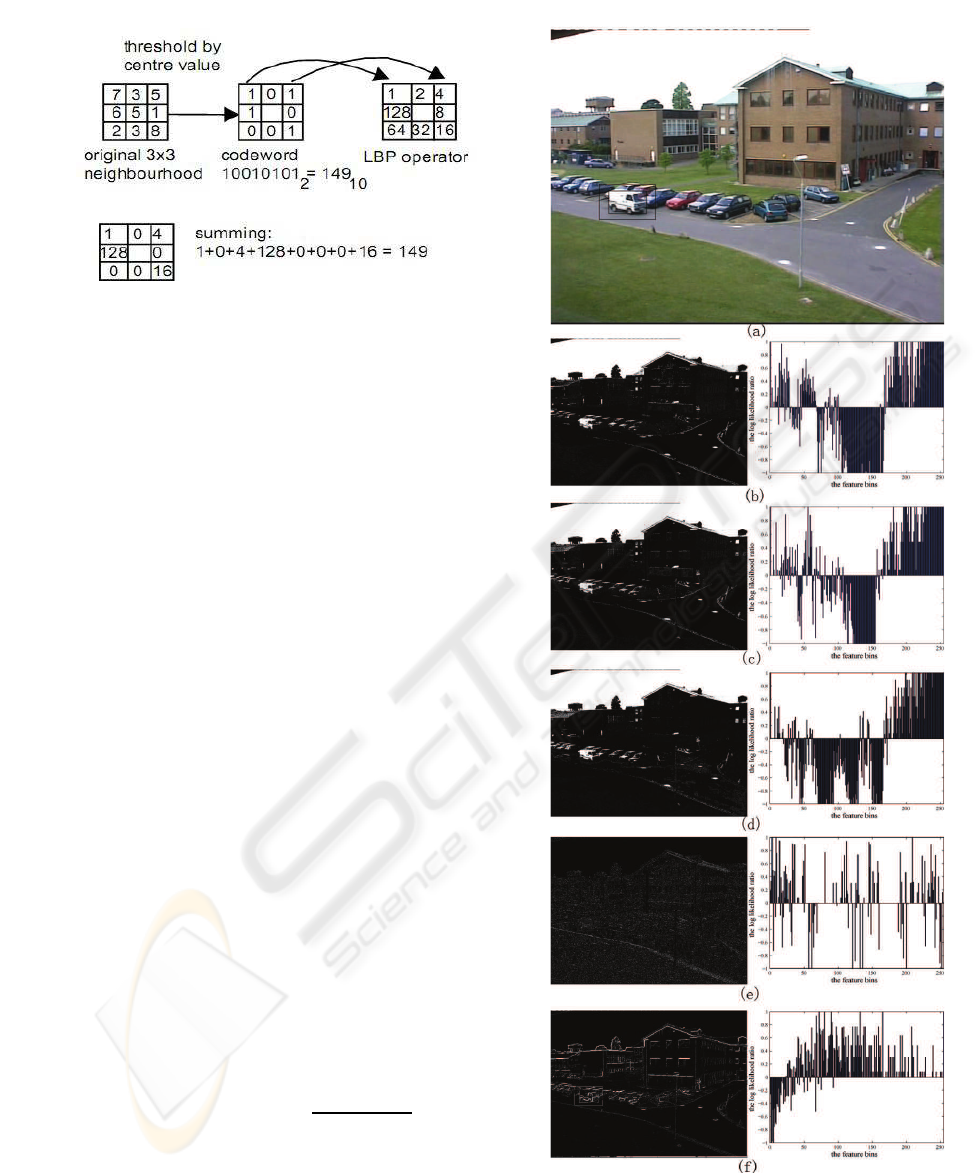
Figure 3: Illustration of the basic LBP operator.
3 ONLINE, ADAPTIVE
FEATURES FUSION METHOD
FOR TRACKING
There are two main components in this approach: the
online adaptive features fusion based on discrimina-
tion criterion function, and the kernel-based tracking,
which is used to track targets, based on the fused fea-
ture.
3.1 Features Fusion Method
In this paper, the target is represented by a rectangular
set of pixels covering the target, while the background
is represented by a larger surrounding ring of pixels.
Given a feature f, let H
fg
(i) be a histogram of target
and H
bg
(i) be a histogram for the background. The
empirical discrete probability distribution p(i) for the
object and q(i) for the background, can be calculated
as p(i) = H
fg
(i)/n
fg
andq(i) = H
bg
(i)/n
bg
, where
n
fg
is the pixel number of the target region and n
bg
the pixel number of the background. The weight his-
tograms represent the features only. It does not re-
flect the descriptive ability of the features directly. A
log-likelihood ratio image is employed to solve this
problem [14, 15]. The likelihood ratio nonlinear log
likelihood ratio maps feature values associated with
the target to positive values and those associated with
the background to negative values. The likelihood ra-
tio of a feature is given by
L(i) = max(−1,min(1,log(
max(p(i),ε)
max(q(i),ε)
))), (6)
where ε is a very small number( set in 0.001 in this
work), that prevents dividing by zero or taking the log
of zero. Likelihood ratio images are the foundation
for evaluating the discriminativeability of the features
in the candidate features set. Figure 4 shows the like-
lihood ratio images of different features.
Figure 4: Different feature images after likelihood ratio pro-
cess. (a) The input frame; (b) feature R and likelihood ratio;
(c) feature G and likelihood ratio; (d) feature B and likeli-
hood ratio; (e) LBP texture feature and likelihood ratio; (f)
Prewitt edge feature and likelihood ratio.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
8
In the practise, the whole weighted images
weighted by log likelihood are not needed to be cal-
culated for the computational complexity. The cor-
responding variance is employed to measure the sep-
arately between target and background classes. Us-
ing the method in Collins et al. (2005) and Wang
and Yaqi (2008). based on the equality var(x) =
E[x
2
] −(E[x])
2
, the variance of the log likelihood is
computed as
var(L : p) = E[L(i)
2
] −(E[L(i)])
2
. (7)
The discriminativeability of each feature is calculated
by the variance ratio. The hypothesis in this paper is
that the features that best discriminate between target
and background are also best for tracking the target.
So, as the target’s features describe model, a highest
weight is given to the best discriminate feature, and
the less discriminate feature has a smaller contribu-
tion. Based on the discrimination criterion function
, the target features describe model can be calculated
as
p
t
(i) =
n
∑
k=1
λ
k
p
k
(i), (8)
λ
k
=
var
k
(L : p)
∑
n
k=1
var
k
(L : p)
, (9)
where p
k
(i) is the feature K
′
s probability distribution
model, λ
k
is the weight and
∑
n
k=1
λ
k
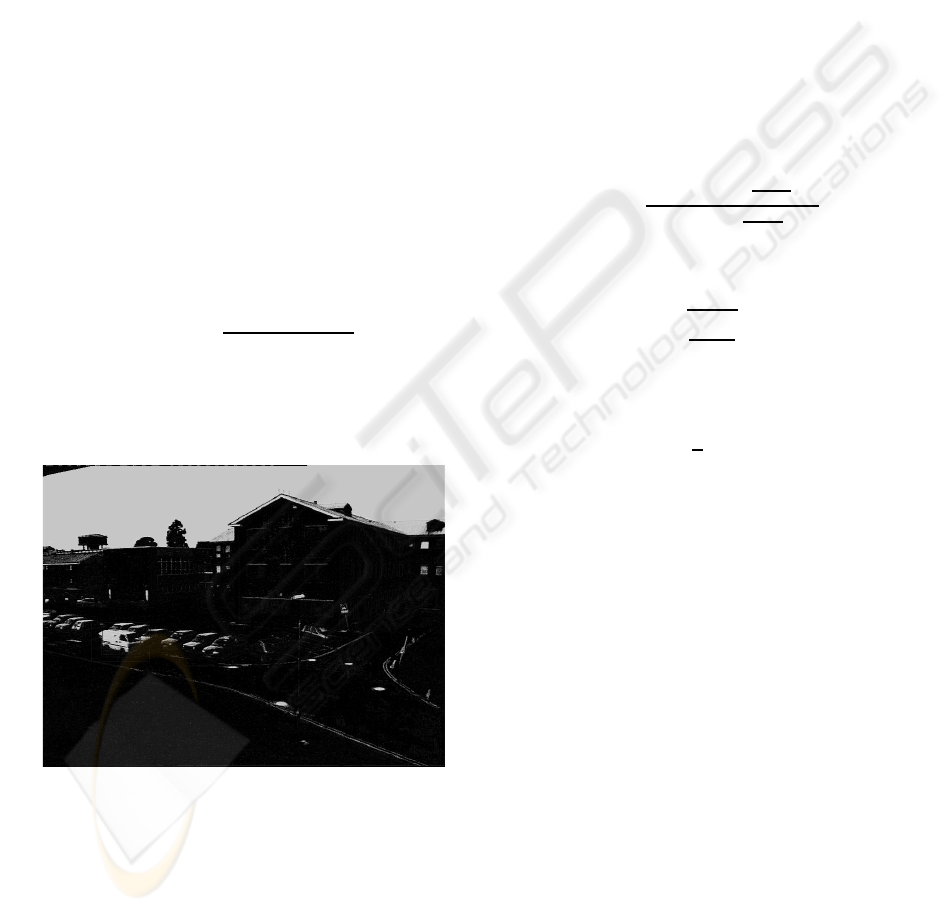
= 1 . Figure 5
shows the fusion of the five features image.
Figure 5: The image after fusion.
3.2 Kernel-based Tracking
Mean shift is a nonparametric kernel density estima-
tor, which, based on the colour kernel density esti-
mation, has recently gained more attention due to its
low computational complexity and robustness to ap-
pearance change, however, the basic mean shift track-
ing algorithm assumes that the target representation is
discriminative enough against the background. This
assumption is not always true, especially when track-
ing is carried out in a dynamic background (Comani-
ciu et al., 2003)(Li et al., 2008). An online, adaptive
features fusion mechanism is embedded in the kernel-
based mean shift algorithm for effectivetracking. Due
to the continuous nature of video, the distribution of
target and background features in the current frame
should remain similar to the previous frame and the
fused feature model should still be valid. The initial
position of the target is given by y0 which is deter-
mined in the previous frame. The target model is
P = p
t,
t=1...m
,
∑
m
t=1
p
t
= 1 , and the candidate target
model is P(y
0
) = p
t
(y
0
)
t=1...m
,
∑
m
t=1
p
t
= 1, where p
t
is the fused feature model. The Epanechnikov pro-
file [8, 9] is employed in this paper. The target’s shift
vector form y
0
in the current frame is computed as
y
1
=
∑
n
h
i=1
X
i
ω
i
g(k
y
0
−X
i
h
k
2
)
∑
n
h
i=1
ω
i
g(k
y
0
−X
i
h
k
2
)
, (10)
where g(x) = −k
′
(x) ,k(x) is Epanechnikov profile, h
is bandwidth and ω
i
can compute as
ω
i
=
m
∑
t=1
s
P
P(y
0
)
δ[b(x
i
) −t]. (11)
The tracker assigns a new position of the target by
using
y
1
=
1
2
(y
0
+ y
1
). (12)
If ky
0
−y
1
k , the iteration computation stops and y
1
is taken as the position of the target in the current
fame. Otherwise let y
0
= y
1
, then using Eq. (10) get
the shift vector and do position assignment using Eq.
(12). From Eq. (8) and Eq. (10), the pixels’ weight is
assigned by two parts. One is the kernel profile, which
gives high weight to the pixel nearly to the centre. The
other one is the discriminative ability of each feature.
Higher weight is given to the higher discriminative
ability feature.
3.3 Template Update Mechanism
It is necessary to update the target model, because
the variation of the target appearance and its back-
ground. When the target appearance or the back-
ground changes, the fixed target model can not accu-
rate describe the target, so it can not obtain the right
position of target. But using an inaccurately track-
ing result to update the target model may lead to the
wrong update of the target model. With the error ac-
cumulate, it finally results in track failure.
In order to alleviate the mode drifts, an adaptive
model update mechanism based on the likelihood of
A TARGET TRACKING ALGORITHM BASED ON ADAPTIVE MULTIPLE FEATURE FUSION
9

the features between successive frames is proposed in
this paper. During the initialization stage, the target
is obtained by a hand-draw rectangle and the target
model is computed by the fusion method introduced
in the previous subsection. The fused target model is
used for tracking in the next frame and is also kept
to use in subsequent model updates. Following the
method in (Wang and Yaqi, 2008), the updated target
model M can be computed as
M = (1−L
ic
)M
i
+ L
ic
M
c
, (13)
L
ic
=
m
∑
u=1
√
M
i
M
c
, (14)
where L
ic
is the likelihood between the initial model
and current model measured by Bhattacharyya coeffi-
cient (Comaniciu and Meer, 2002)(Comaniciu et al.,
2003); M
i
is the initial model; M
c
is the current target
model computed as
M
c
= (1 −L
pc
)M
p
+ L
pc
M
a
, (15)
where M
p
is the previous target model, M
a
is the cur-
rent target fused-feature introduced in section 3, and
L
pc
is computed the likelihood between the M
a
and
M
p
. The proposed updating method considers tem-
poral coherence by weighing the initial target model,
previous target model and current candidate. It can be
more robust for the target appearance and the back-
ground change.
4 EXPERIMENTS
To illustrate the benefits of the proposed approach,
experiments on various test video sequences using
the proposed approach and other algorithms are con-
ducted. The experiment was done using Pentium core
1.8G, Win XP, MATLAB 7.0. The Epanechnikovpro-
file was used for histogram computations. The RGB
colour feature, LBP texture feature and Prewitt edge
feature were taken as feature space and it was quan-
tized into 256 bins. The public dataset with ground
truth is used to test the proposed method (Collins
et al., 2005). The tracking results are compared with
the basic mean-shift (Comaniciu and Meer, 2002),
fore/background ratio, variance ratio, peak difference
(Comaniciu et al., 2003), and multiple feature (Wang
and Yaqi, 2008) trackers. The initialization of the
tracking is given by a hand-draw rectangle. The same
initializations are given to all the trackers. In this ex-
periment, sequences EgTest01, EgTest02, EgTest03,
EgTest04 and EgTest05 in the database are chosen.
This challenging tracking sequences is made by vari-
ous factors, such as different viewpoints, illumination
changes, reflectance variations of the targets, similar
objects nearby, and partial occlusions.
The tracking success rate is the most important
criterion for target tracking, which is the number of
successful tracked frames divided by the total num-
ber of frames. The bounding box that overlaps the
ground truth can be considered as a successful track.
To demonstrate the accuracy of tracking, the aver-
age overlap between bounding boxes (Avg overlap
BB) and average overlap between bitmaps within the
overlapping bounding box area (Avg overlap BM) are
employed. Avg overlap BB is the percentage of the
overlap between the tracking bounding box and the
bounding box identified by ground truth files. Avg
overlap BM is computed in the area of the intersection
between the user bounding box and the ground truth
bounding box. The comparison results are shown in
Table 1.
From the comparison results that show the suc-
cessful tracking ratio, the proposed tracker gives the
best results in five of the test sequences. The basic
mean-shift tracker dose not have a good performance
in EgTest01, EgTest02 and EgTest05, because the ba-
sic mean-shift tracker dose not use the multi-features
information and lacks adaptive strategy. Although an
adaptive strategy is employed in Collins’s approach,
it dose not have good performance in EgTest01,
EgTest02 and EgTest03. The peak difference algo-
rithm has a better performance in the first sequences.
The others sequences, however, do not demonstrate a
good performance either. The multi-features methods
that Integrate Colour and Shape-Texture features have
a higher performance in all the sequences. Although
the proposed approach has the best performance than
the other trackers. But in EgTest03, EgTest04 and
EgTest05the successful tracking ratio is only 25.30%,
12.03% and 24.31%. The failed tracking examples
are show as Figure 6.The main reason leading to
tracking failure includes the similar feature distribu-
tion nearby as (a) in Fig. 6, the lower discrimination
between foreground and background as (b) in Fig. 6
and long time occlusions as (c) in Fig. 6.
For accuracy of tracking, the proposed tracking
algorithm is not the best in some of the sequences.
There is not obvious correlation between the track-
ing accuracy criterion and the tracking successful ra-
tio.The proposed approach does not have the highest
accuracy, because in most frame-sequences,the back-
ground and the target are not always separated accu-
rately.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
10
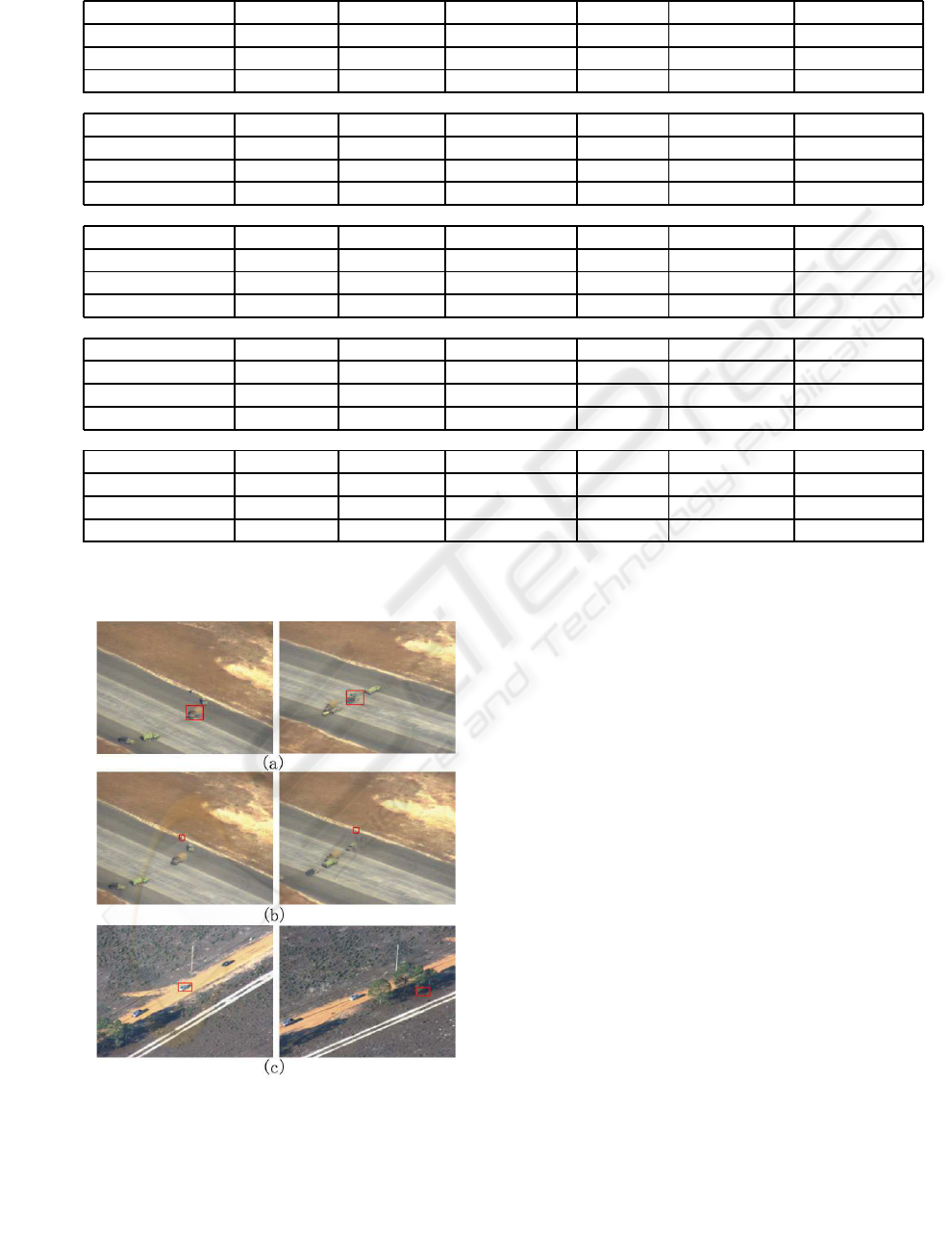
Table 1: Tracking performance of different algorithms. (a) EgTest01; (b) EgTest02; (c) EgTest03; (d) EgTest04; (e) EgTest05.
Criterion MeanShift FgBgRatio VarianceRatio PeakDiff Multi-feature The Proposed
Successful ratio 17.58% 100% 29.12% 100% 100% 100%
Avg overlap BB 65.50% 62.87% 76.87% 61.76% 61.62% 74.28%
Avg overlap BM 66.26% 49.15% 61.30% 57.76% 68.38% 76.56%
(a)
Criterion MeanShift FgBgRatio VarianceRatio PeakDiff Multi-feature The Proposed
Successful ratio 39.23% 39.23% 27.69% 30.77% 100% 100%
Avg overlap BB 91.09% 89.13% 85.19% 90.54% 93.32% 94.21%
Avg overlap BM 74.69% 66.98% 73.32% 65.91% 72.70% 73.53%
(b)
Criterion MeanShift FgBgRatio VarianceRatio PeakDiff Multi-feature The Proposed
Successful ratio 20.62% 17.90% 12.06% 12.06% 20.23% 25.30%
Avg overlap BB 86.96% 87.01% 93.74% 92.27% 88.66% 90.11%
Avg overlap BM 66.65% 54.04% 70.79% 67.20% 69.37% 71.23%
(c)
Criterion MeanShift FgBgRatio VarianceRatio PeakDiff Multi-feature The Proposed
Successful ratio 9.84% 8.74% 9.84% 3.83% 9.84% 12.03%
Avg overlap BB 66.78% 67.92% 66.03% 63.60% 69.52% 71.00%
Avg overlap BM 59.70% 52.75% 66.74% 66.42% 56.34% 68.43%
(d)
Criterion MeanShift FgBgRatio VarianceRatio PeakDiff Multi-feature The Proposed
Successful ratio 13.64% 13.64% 13.64% 13.64% 21.22% 24.31%
Avg overlap BB 94.58% 88.75% 86.46% 86.98% 72.65% 75.41%
Avg overlap BM 84.02% 71.12% 85.12% 69.90% 64.45% 70.03%
(e)
Figure 6: The failure tracking examples of the proposed
approach. (a) and (b) the failure frame in EgTest03; (c) the
failure result in EgTest04.
5 CONCLUSIONS
An online, adaptive multiple-feature fusion and tem-
plate update mechanism for kernel-based target track-
ing is presented in this paper. Based on the theory
of biological visual recognition system, RGB colour
features, Prewitt edge feature and local binary pattern
(LBP) texture feature are utilized to implement the
proposed scheme. Experiment results show that the
proposed approach is effective in target tracking. The
comparison studies with other algorithms show that
the proposed approach performs better in tracking of
moving targets.
ACKNOWLEDGEMENTS
This work is partially supported by China Scholarship
Council.
REFERENCES
Aroussi, E. and Mohamed (2008). Combining dct and lbp
feature sets for efficient face recognition. In 3rd Inter-
A TARGET TRACKING ALGORITHM BASED ON ADAPTIVE MULTIPLE FEATURE FUSION
11

national Conference on Information and Communica-
tion Technologies: From Theory to Applications, 3rd
International Conference on Information and Commu-
nication Technologies: From Theory to Applications,
pages 1–6.
Bar, M. and Kassam, K. (2006). Top-down facilitation of
visual recognition. In Proceedings of the National
Academy of Sciences, volume 103 of Proceedings of
the National Academy of Sciences, pages 449–454.
Barron, J. and Fleet, D. (1994). Performance of optical flow
techniques. International Journal of Computer Vision,
12(1):43–77.
Chang, W., Chen, C., and Jian, Y. (2008). Visual tracking in
high-dimensional state space by appearance- guided
particle filtering. IEEE Transactions on Image Pro-
cessing, 17(7):1154–1167.
Collins, R., Lipton, A., Fujiyoshi, H., and Kanade, T.
(2001). Algorithms for cooperative multi-sensor
surveillance. In Proceedings of the IEEE, volume 89
of Proceedings of the IEEE, pages 1456–1477.
Collins, R., Liu, Y., and Leordeanu, M. (2005). Online
selection of discriminative tracking features. IEEE
Transactions on Pattern Analysis and Machine Intel-
ligence, 27(10):1631–1643.
Comaniciu, D. and Meer, P. (2002). Mean shift: A robust
approach toward feature space analysis. IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
24(5):603–619.
Comaniciu, D., Ramesh, V., and Meer, P. (2003). Kernel-
based object tracking. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 25(5):564–577.
Dawei, L. and Qingming, H. (2007). Mean-shift blob track-
ing with adaptive feature selection and scale adap-
tation. In IEEE Conference on Image Processing,
volume 3 of IEEE Conference on Image Processing,
pages 369–372.
Jhuang, H., Serre, T., Wolf, L., and Poggio, T. (2007). A
biologically inspired system for action recognition. In
IEEE 11th international conference on Computer Vi-
sion, volume 14 of IEEE 11th international confer-
ence on Computer Vision, pages 1–8.
Li, Z., Tang, L., and Sanq, N. (2008). Improved mean shift
algorithm for occlusion pedetrian tracking. Electron-
ics Letters, 44:622–623.
Maggio, E., Smerladi, F., and Cavallaro, A. (2007). Adap-
tive multifeature tracking in a particle filtering frame-
work. IEEE transactions on Circuits and Systems for
Video Technology, 12(10):1348–1359.
Mattews, I., Iashikawa, T., and Baker, S. (2004). The tem-
plate update problem. IEEE Transactions on Pattern
Analysis and Machine Intelligence, 26(8):810–815.
Ojala, T., Pietikainen, M., and Harwood, D. (1996). A com-
parative study of texture measures with classifcation
based on feature distributions. Pattern Recognition,
29(1):51–59.
Pan, J., Ho, B., and Zhang, J. Q. (2008). Robust and accu-
rate object tracking under various types of occlusion.
IEEE Transactions on Circuits and Systems for Video
Technology, 12(2):223–236.
Shalom, Y. and Fortmann, T. (1988). Tracking and Data
Association. Academic Press, Boston.
Sharifi, M., Fathy, M., and Mahmoudi, M. (2002). A clas-
sified and comparative study of edge detection algo-
rithms. In International Conference on Information
Technology: Coding and Computing, International
Conference on Information Technology: Coding and
Computing, pages 117–120.
Stauffer, C. and Grimson, W. (1995). Learning patterns
of activity using real-time tracking. IEEE Transac-
tions on Pattern Analysis and Machine Intelligence,
17(8):814–820.
T, X. and T, B. (2007). Fusing Gabor and LBP Feature Set
for Kernel-Based Face Recognition, volume 4778 of
Lecture Notes in Computer Science. Springer Berlin,
Heidelberg.
Tal, N. and Bruckstein, A. (2008). Over-parameterized vari-
ational optical flow. International Journal of Com-
puter Vision, 76(2):205–216.
Thomas, S. and Gabriel, K. (2007). A quantitative theory
of immediate visiual recognition. Program on Brain
Research, 167:33–56.
Wang, J. and Yaqi, Y. (2008). Integrating color and shape-
texture features for adaptive real-time object tracking.
IEEE Transactions on Image Processing, 17(2):235–
240.
Wei, H. and Xiaolin, Z. (2007). Online feature extraction
and selection for object tracking. In IEEE Conference
on Mechatronics and Automation, IEEE Conference
on Mechatronics and Automation, pages 3497–3502.
Yong, Y. and Croitoru, M. (2006). Nonlinear multiscale
wavelet diffusion for speckle suppression and edge en-
hancement in ultrasound images. IEEE transactions
on Medical Imaging, 25(3):297–311.
Zhaozhen, Y., Poriki, F., and Collins, R. (2008). Likeli-
hood map fusion for visual object tracking. In IEEE
workshop on Applications of Computer Vision, IEEE
workshop on Applications of Computer Vision, pages
1–7.
ICINCO 2009 - 6th International Conference on Informatics in Control, Automation and Robotics
12
