
PYRAMIDAL MULTI-VIEW PBR
A Point-based Algorithm for Multi-view Multi-resolution Rendering of Large Data
Sets from Range Images
Sajid Farooq and J. Paul Siebert
Computer Vision and Graphics Lab, Dept of Computer Science, University of Glasgow, Glasgow, U.K.
Keywords: Multi-view integration, Point-based Rendering, Display Algorithms, Viewing Algorithms, Stereo-
photogrammetry, Stereo-capture.
Abstract: This paper describes a new Point-Based-Rendering technique that is parsimonious with the typically large
data-sets captured by stereo-based, multi-view, 3D imaging devices for clinical purposes. Our approach is
based on image pyramids and exploits the implicit topology relations found in range images, but not in
unstructured 3D point-could representations. An overview of our proposed PBR-based system for
visualisation, manipulation, integration and analysis of sets of range images at native resolution is presented
along with initial multi-view rendering results.
1 INTRODUCTION
3D images have the potential to provide clinicians
with an objective basis for assessing and measuring
3D surface anatomy, such as the face, foot or breast.
Clinicians often resort to subjective measures that
rely on naked eye observations, and carry out
surgical decisions based upon that data. Today, 3D
scanned images of patients can provide objective
metric measurements of body surfaces to sub-
millimetre resolution. Commercially available
stereo-photogrammetry capture systems such as
C3D (Siebert & Marshall, 2000) are capable of
capturing 3D scans up to 16 megapixels in
resolution. Although stereo-photogrammetry
systems are desirable for many reasons, they present
their own challenges. Large sets of data are difficult
to manage, process, and visualize. In addition, stereo
systems capture data from multiple ‘pods’ (each pod
consisting of a pair of cameras) around the object,
resulting in several 2.5D captures, each with a
partial view of the object. Hence, multi-view
integration techniques are usually required to join
these partial views into a single 3D representation.
The goal of this paper is to present progress towards
a multi-view, multi-resolution method that permits
clinicians to visualise, manipulate, measure and
analyse large 3D datasets at native imaging
resolution depicting 3D surface anatomy.
Traditionally, the most popular data
representation method for displaying 3D data has
been the 3D polygon. Large data sets, such as
captured by stereo imaging devices, however, are so
dense that polygon numbers must be reduced by
means of mesh decimation, increasing the size of the
remaining polygons and thereby losing resolution. In
order to achieve 3D visualisation at native imaging
resolution, it is more efficient to treat each 3D
(2.5D) measurement as a Point rendering primitive
(Levoy and Whitted, 1985) than attempt to render
polygons. Large data sets converted to polygons also
claim more memory than storing each individual
point (as regular range images for example).
Polygons are a notoriously difficult representation
when it comes to multi-view integration. Marching-
cubes (Lorenson and Cline, 1987) is a popular
algorithm, however, it rarely works seamlessly with
very high-resolution models. The standard
techniques, Marching-cubes (Lorenson and Cline,
1987), Zippered Polygon Meshes (Turk, Levoy,
1994), all suffer a loss of resolution at the seams,
and provide unpredictable results when polygonal
resolution approaches pixel size. In light of the
problems with polygon rendering methods, point-
based rendering (PBR) techniques have steadily
been gaining interest.
211
Farooq S. and Siebert J.
PYRAMIDAL MULTI-VIEW PBR - A Point-based Algorithm for Multi-view Multi-resolution Rendering of Large Data Sets from Range Images.
DOI: 10.5220/0001823602110216
In Proceedings of the Fourth International Conference on Computer Graphics Theory and Applications (VISIGRAPP 2009), page
ISBN: 978-989-8111-67-8
Copyright
c
2009 by SCITEPRESS – Science and Technology Publications, Lda. All rights reserved
2 PREVIOUS WORK
The idea of using Points as a rendering primitive
was reported by Levoy and Whitted as far back as
1985 (Levoy and Whitted, 1985). The most common
Point-Based Rendering implementation currently in
use is Surface Splatting (Zwicker et al. 2001), where
a 3D object is represented as a collection of surface
samples. These sample points are reconstructed,
low-pass filtered and projected onto the screen plane
(Räsänen, 2002). Many extensions have been
proposed for Surface Splatting since their
introduction. Among others, Splatting has been
extended to handle multiple views (Hübner et al.
2006).
Rusinkiewicz and Levoy describe QSplat, a
system for representing and progressively displaying
meshes that combines a multi-resolution hierarchy
based on bounding spheres with a rendering system
based on points. A single data structure is used for
view-frustum culling, back-face culling, level-of-
detail selection, and rendering (Rusinkiewicz and
Levoy, 2000).
Both QSplat and Splatting techniques, however,
have their limitations. QSplat, while efficient, relies
on triangulated mesh data as input rather than native
Point data, and lacks anti-aliasing features. Splatting,
on the other hand, discards connectivity information
that is vital in a clinical context for measurement and
analysis of the underlying data.
Several multi-view integration approaches have
been proposed. Hubner et al (2006) introduce a new
method for multi-view Splatting based on deferred
blending. Hilton et al (2006), on the other hand, take
the traditional 'polygonization' approach by
proposing a continuous surface function that merges
the connectivity information inherent in the
individual sampled range images and constructs a
single triangulated model. Problems with both
Splatting techniques, and polygon approaches have
been mentioned earlier, making either multi-view
technique less than ideal for clinical purposes.
Image pyramids were introduced by Burt and
Adelson (1983a) as an efficient and simple multi-
resolution scale-space mage representation. Image
pyramids, in addition to providing a multi-resolution
algorithmic framework, have found use in down-
sampling images smoothly across scale-space.
Image pyramids, although 2D in nature, were
extended by Gortler et al (1996) in the landmark
Lumigraph paper where they discuss the ‘pull-push’
algorithm. The latest use of the image pyramid in
PBR techniques, and one that is closest to our work,
is that of Marroqium et al (2008). They implement
the image pyramid on the GPU to provide an
accelerated, multi-resolution, Point Based Rendering
algorithm based on scattered one-pixel projections,
rather than Splats as proposed by Zwicker et al
(2001).
Existing techniques, despite making use of range
images, and/or image pyramids, have not made the
combined use of the connectivity information
provided by the former, and the multi-resolution
capabilities provided by the latter, to provide a
multi-resolution, multi-view PBR algorithm that
could be used in a clinical setting for measurement
and analysis. We propose a method that takes range
images as its input, uses an image pyramid for
down-sampling, and smoothly joining multiple
views in image space via a multi-resolution Spline
as proposed by Burt et al (1983b), and finally,
projects the image using 3x3 pixel Gaussian kernels
for sub-pixel accurate, anti-aliased rendering.
Texture
Image
Conversion to
Laplacian Image
Pyramid
Gauss
ian
Level
n-1
Level
n-2
Level
1
Level
n
Transform from
Range to World
Space
Apply viewing
transformations
Project
Orthographically
onto screen
Rendered
Gaussian
Image
Rendered
Laplacian Level
n-1
Rendered
Laplacian Level
n-2
Rendered
Laplacian Level
1
Reconstruct
Pyramid
Range
Image
Conversion to
Gaussian Image
Pyramid
Level n Level n-1 Level n-2
Level
1
Gaussian
LUT
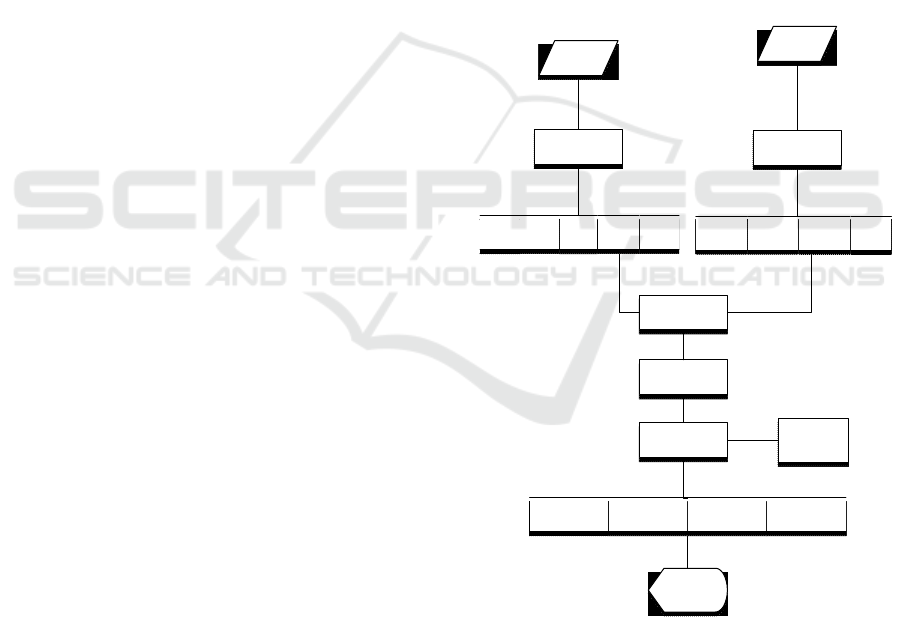
Figure 1: Overview of the rendering process for a single
view.
The advantage of using range images, coupled
with a PBR approach, is that our method renders
data at its native resolution, retains connectivity
information for measurement purposes, and provides
a matrix-like data-structure that is compact and ideal
for GPU acceleration.
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
212
3 THE PROPOSED METHOD
The proposed method uses image pyramids, range
images and the Gaussian kernels to provide anti-
aliased, hole-free, multi-resolution 3D images. A
high-level overview of the algorithm, for a single
view, is as follows.
The input range image, provided in our case by a
stereo-photogrammetry capture system, is first
converted into a Gaussian Pyramid to provide
several range images, at subsequently smaller
resolutions. Since the range images together
comprise 3D data, this effectively provides anati-
aliased models at several resolutions. The
corresponding texture image is converted into a
Laplacian Pyramid, providing a texture image for
each of the corresponding models to be derived from
the range images. Starting from the apex, i.e the
lowest resolution image in the pyramid, each pixel
from the range image is transformed from range
space to World Coordinates. The colour for this
point is derived from the corresponding Texture
image pyramid. Once in World Coordinates, the
point goes through any pending viewing
transformations. Finally, the pixel is projected onto
the screen as a 3x3 Guassian kernel. This results in a
series of images, of varying sizes, depending upon
the level of the Pyramid they are generated from.
The images form an image pyramid, in screen-space,
with a Gaussian Image at the apex, followed by
Laplacian Images containing successively higher-
frequency detail.
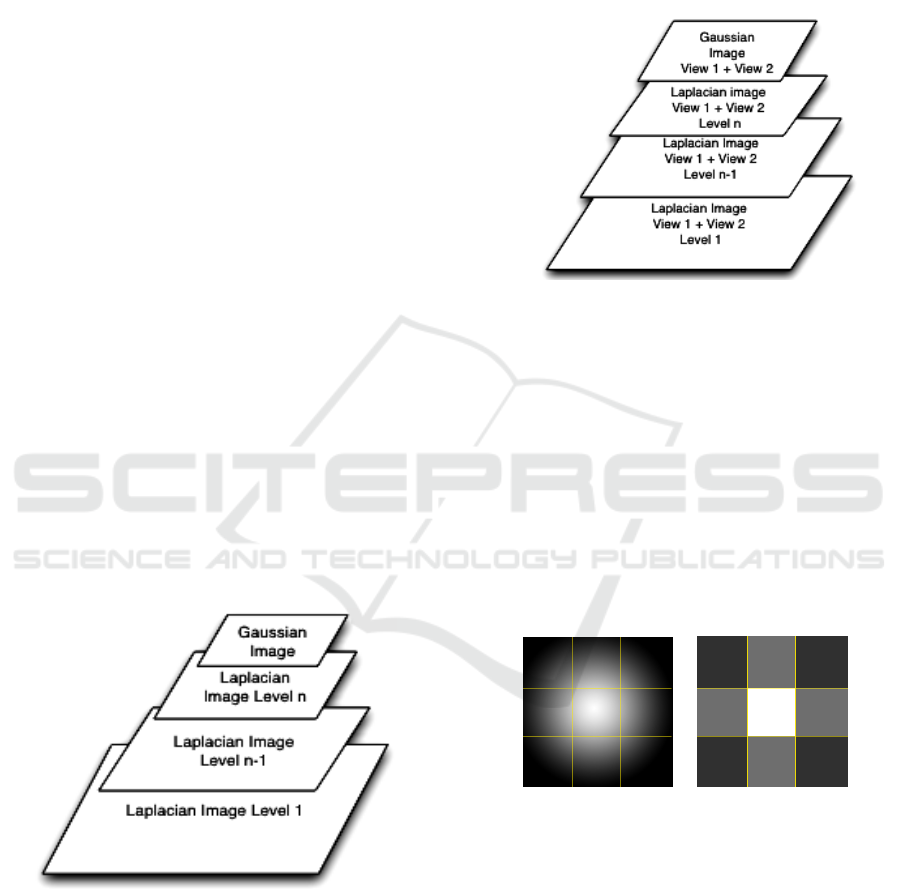
Figure 2: Single-view Output Pyramid.
The resultant images can now be recombined to
form a Pyramid in viewport-space again. Though the
method outlined above renders a single view, it is
extendable to multiple views without any additional
effort. A multi-view image can be obtained by
repeating the process with another view (another
input range image and texture image), and projecting
each corresponding level into the same output space.
The resulting images represent an image pyramid as
before. The result of the reconstruction of this
pyramid, however, is a blending of the two views
together via a multi-resolution spline as proposed by
Burt and Adelson (1983b).
Figure 3: Multi-view Output Pyramid.
3.1 Details of the Rendering Algorithm
The proposed method makes extensive use of image
pyramids as defined by Burt (1983a) for seamless
splining of the two views, and of Gaussian kernels
for sub-pixel anti-aliased display of the points. An
explanation of the multi-resolution spline can be
found in (Burt and Adelson, 1983b). An explanation
of how the Gaussian kernel is used for rendering
follows.
3.2 The Gaussian Kernel
Figure 4: A continuous Gaussian function (left) and its
approximation by a 3x3 pixel kernel (right). Shifted
versions in x,y allow sub-pixel Gaussian splat placement.
A single point can be approximated by a continuous
Gaussian function. For display, it needs to be
transformed into discrete values. For every fractional
pixel value, a new Gaussian is generated, offset from
the centre. In order to speed up the process, a Look-
Up Table was generated for 10,000 kernels thereby
providing 0.01pixel shift resolution in x,y.
If the image is rendered using the Gaussian
kernels as-is, several bright patches appear on the
final image where the Gaussian kernels overlap. The
PYRAMIDAL MULTI-VIEW PBR - A Point-based Algorithm for Multi-view Multi-resolution Rendering of Large Data
Sets from Range Images
213
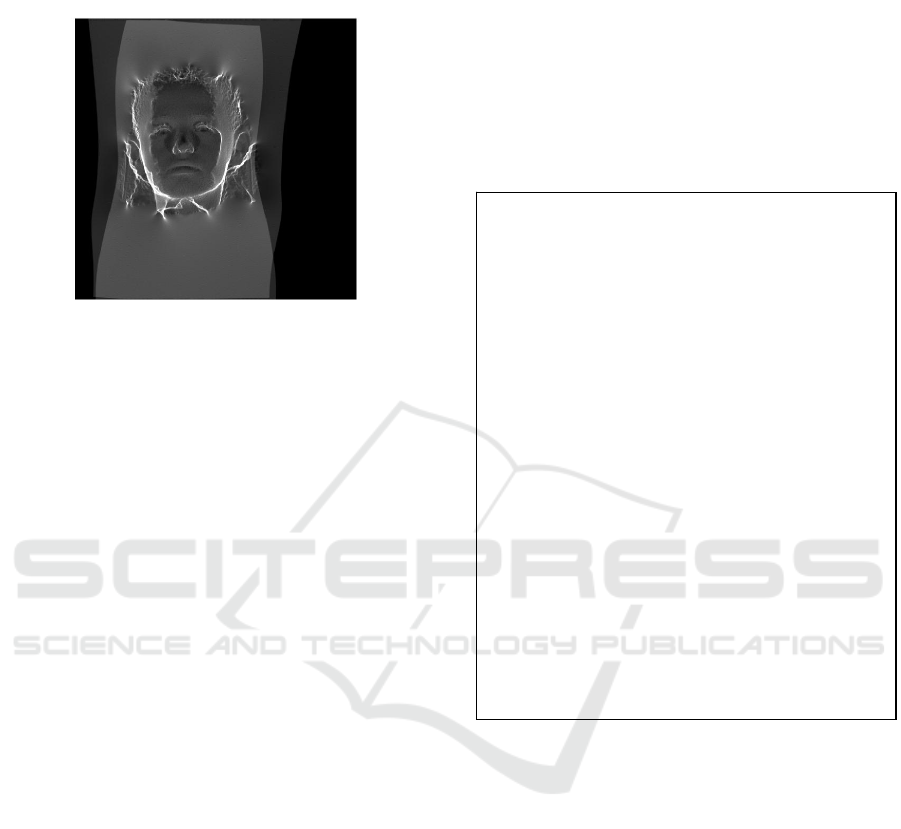
image is therefore normalized by dividing it by a
Splat map.
Figure 5: The Splat map combining the two overlapping
input range map views.
The Splat map is generated by first rendering
the Gaussian kernels without colour from the texture
map into a separate buffer to keep a count of the
contribution from each Gaussian kernels that falls
into each pixel. This defines each pixels weight. The
un-normalized image is then divided pixel-wise by
this Splat map to obtain the final, normalized, image.
4 ONGOING WORK
From the current results, it is obvious that Hidden-
Surface Removal is required. Hidden-surface
Removal may be implemented by treating a group of
three connected points as an implicit polygon, and
performing Back-Face Culling, and ordering the
points using any of the well-known polygon-
ordering techniques such as the Z-Buffer.
The existing method combines two views in
image space via a multi-resolution spline, however,
for the purposes of measurement, it is necessary to
employ a multi-view algorithm that merges the
underlying data. Ju et al (2004) describes view-
integration based on polygons. We propose to
extend their algorithm to work with range images
and image pyramids, and make improvements to the
basic algorithm in the process. The algorithm
proposed by Ju et al begins with a blue-screen stereo
capture of an object. The blue-screen permits
masking of the background, selectively isolating the
object. The range images are then decomposed into
subset patches, categorising elements into visible,
invisible, overlapping, and unprocessed patches
when compared with a second range image. To
resolve ambiguities in a range image, a confidence
competition is conducted, whereby overlapping
patches are culled, and the remaining winning
patches are merged into a single mesh. It should be
noted that this process needs to be carried out only
once, as a pre-processing step.
Since our data representation uses groups of
points (as opposed to polygons), it will work on
individual pixels rather than breaking down the
range image into patches. The following algorithm
summarizes the process:
Since multi-view stereo-photogrammetry relies
on range images being generated from cameras in
close vicinity, there will be considerable overlap
between various range images that are produced
from multiple views, especially those that are close.
Before we integrate the models, it is necessary to
take care of this redundant data. As proposed by Ju
et al, it is necessary to carry out a 'competition' in
which the best data from each range image is
selected.
First, it is necessary to find precisely the
redundant data, i.e., where range images overlap.
Hence, we traverse through each range image, and
scan every other range image from this point-of-
view (by projecting them into range image space) to
find the overlapping pixels.
N
= Num of Range Images
Masks of All range Images = 0
loop from 1 to N
Compare every Range image i
With every other Range Image j
if i != j
{
project range-map j onto i
find overlapping pixels
for each overlapping pixel
{
For both views j and j:
use confidence,
normal_map, chroma_map to
find competition_weight_i
and competition_weight_j
for current pixel
if comptetion_weight_i -
competition weight of j <
threshold:
mask[currentpixel] = 1.0
}
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
214
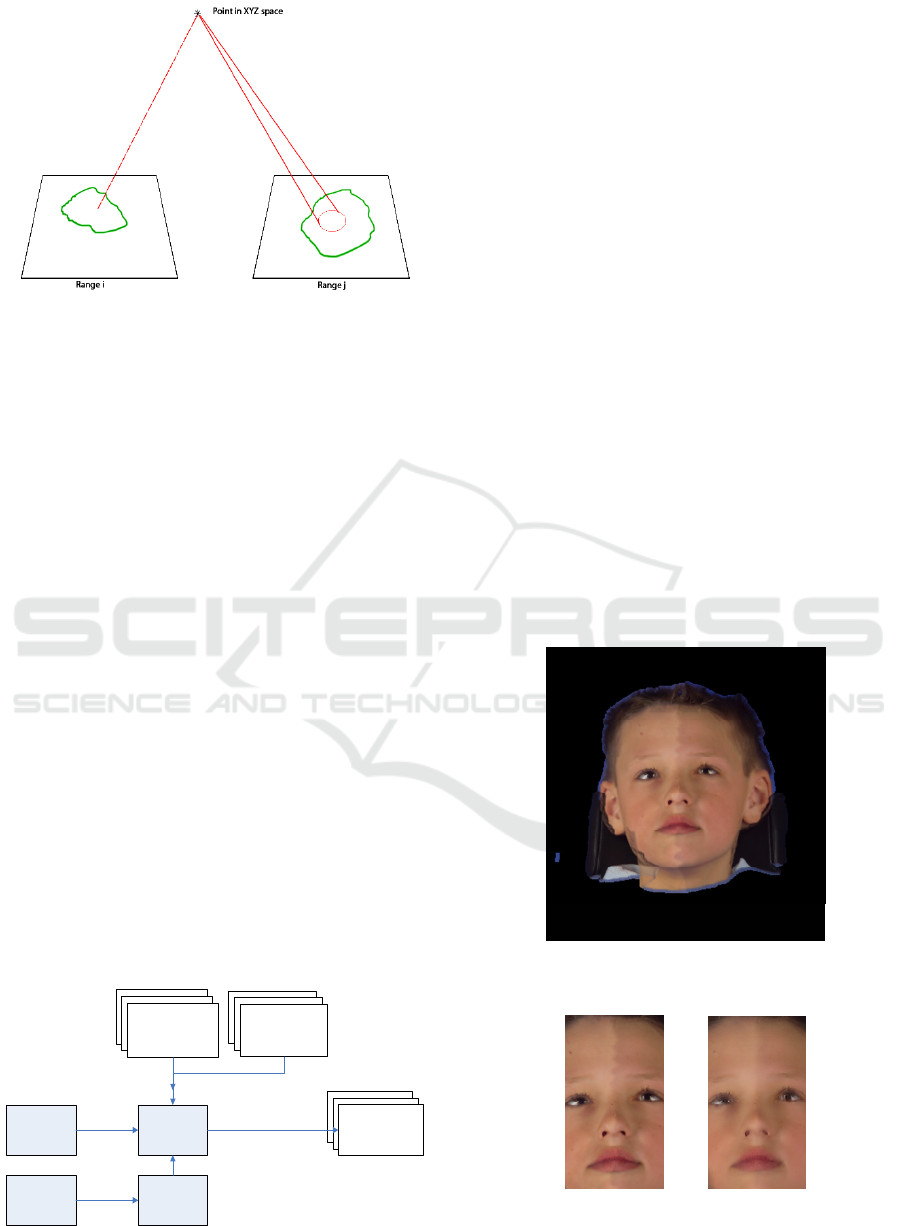
Figure 6: Scanning range image j from the point-of-view
of range image i.
For each overlapping pixel from both views
(view j and View i), we can isolate relevant data
from the background with the help of a blue-
screen/chroma mask we call S. If the pixel is
deemed to be part of the model (and not the
background), we can proceed to calculate the
confidence that a pixel is visible from this view with
the help of a “normal map” as well as a “confidence
map” of the same view, depicting how confident the
3D scanner was about the regeneration of each
individual point in 3D. We call the Confidence value
C. In addition, for both views, for every overlapping
pixel (in range space), we can consider how visible a
point is to a particular view by checking how closely
the normal points towards the view. We can
represent this as V (for Viewing-Angle). The three
maps together, then provide a selection mask with
values [0..1], with 1 being completely visible, 0
being completely invisible, and a value in-between
depicting a semi-visible pixel. This can be written
as:
Competition Weight = S C V (1)
The entire process is summarized in Figure 7 as
follows:
Range i
Range j
Overlapping Pixels
Range Image j
in Range-Image
space of i
Range Image I
+
New Mask
RANGE IMAGE J
Chroma Mask
Confidence
Map
Normals
RANGE IMAGE I
Chroma Mask
Confidence
Map
Normal s
Figure 7: Confidence Competition overview.
At this stage, we can determine which of the two
views won the competition for this particular pixel.
If it was view j, then we mask the current pixel in
view i to that during projection, we will not choose
this pixel from view i again.
A peculiar case arises when for a certain point,
two views tie in the competition, i.e, when there is a
'draw'. In such a case, there are several paths that can
be taken. An assortment of fusion/blending
techniques is available. Which one of these
techniques is most effective is a question that must
be further investigated.
Once data-integration has been accomplished,
measurement operations can be carried out natively
over the range images. Traversing over the range
images is decidedly straightforward due to the range
image’s matrix-like nature.
5 RESULTS AND CONCLUSIONS
Though the work is still ongoing, initial results of
our system can be seen in the images that follow. An
initial test result, based on a shallow blend, reveals
the sources of the two input views, Figure 8. By
creating a 6 layer deep pyramid, the blend better
conceals the join between views, Figure 9.
Figure 8: Result of the proposed method with a Pyramid 3
levels deep.
Figure 9: (Left) The result of the proposed method with a
Pyramid 3 levels deep (Right) The result with a pyramid 6
levels deep.
PYRAMIDAL MULTI-VIEW PBR - A Point-based Algorithm for Multi-view Multi-resolution Rendering of Large Data
Sets from Range Images
215

Without hidden point removal, self occluded
regions of the model blend together in areas such as
the chin and the ear towards the left of the image.
While, the rendering is currently not carried out in
real-time, the proposed method lends itself to GPU
optimization. The above issues will be addressed in
during our ongoing research work to implement the
complete system for clinical visualisation,
manipulation, measurement and analysis of multi-
view range images of surface anatomy.
REFERENCES
A. Hilton, A.J. Toddart, J. Illingworth, and T. Windeatt.
1996. Reliable surface reconstruction from multiple
range images. In Fourth European Conference on
Com- (a) (b) (e) (f) (g) (c) (d)
Burt, P. J. and Adelson, E. H., April 1983a. The Laplacian
Pyramid as a Compact Image Code, IEEE Trans. on
Communications, pp. 532--540.
Burt, P. J. and Adelson, E. H. 1983b. A multiresolution
spline with application to image mosaics. ACM Trans.
Graph. 2, 4 (Oct. 1983), 217-236.
Dimensional Imaging, www.DI3D.com (28 Oct 2008)
Gortler, S. J., Grzeszczuk, R., Szeliski, R., and Cohen, M.
F. 1996. The lumigraph. In Proceedings of the 23rd
Annual Conference on Computer Graphics and
interactive Techniques SIGGRAPH '96. ACM, New
York, NY, 43-54.
Hübner, T., Zhang, Y., and Pajarola, R. 2006. Multi-view
point splatting. In Proceedings of the 4th international
Conference on Computer Graphics and interactive
Techniques in Australasia and Southeast Asia (Kuala
Lumpur, Malaysia, November 29 - December 02,
2006). GRAPHITE '06. ACM, New York, 285-294.
Ju, X., Boyling, T., Siebert, J. P., McFarlane, N., Wu, J.,
and Tillett, R. 2004. Integration of range images in a
Multi-View Stereo System. In Proceedings of the
Pattern Recognition, 17th international Conference on
(Icpr'04) Volume 4 - Volume 04 (August 23 - 26,
2004). ICPR. IEEE Computer Society, Washington,
DC, 280-283.
Levoy, Whitted, January, 1985. Technical Report 85-022.
The Use of Points as a Display Primitive, Computer
Science Department, University of North Carolina at
Chapel Hill.
Lorenson, Cline, 1987. Marching Cubes: A High
Resolution 3D Surface Construction Algorithm. In
SIGGRAPH '87 Proc., vol. 21, pp. 163-169.
Marroquim, R., Kraus, M., and Cavalcanti, P. R. 2008.
Special Section: Point-Based Graphics: Efficient
image reconstruction for point-based and line-based
rendering. Comput. Graph. 32, 2 (Apr. 2008), 189-203.
Räsänen, J. 2002. Surface Splatting: Theory, Extensions
and Implementation. Master's thesis, Helsinki
University of Technology.
Rusinkiewicz, S. and Levoy, M. 2000. QSplat: a
multiresolution point rendering system for large
meshes. In Proceedings of the 27th Annual Conference
on Computer Graphics and interactive Techniques
International Conference on Computer Graphics and
Interactive Techniques. ACM Press/Addison-Wesley
Publishing Co., New York, NY, 343-352.
Siebert,J.P. Marshall,S.J. 2000. Human Body 3D imaging
by speckle texture projection photogrammetry Sensor
Review. Volume 20, No 3 pp 218-226.
Turk, Levoy, 1994. Zippered polygon meshes from range
images. In Proceedings of the 21st Annual Conference
on Computer Graphics and interactive Techniques
SIGGRAPH '94. ACM, New York, NY, 311-318.
Zwicker, M., Pfister., H., Baar, J. V., and Gross, M. 2001
Surface Splatting. In Computer Graphics, SIGGRAPH
2001 Proceedings, pages 371--378. Los Angeles, CA.
GRAPP 2009 - International Conference on Computer Graphics Theory and Applications
216
