
STEREO VISION USING HETEROGENEOUS SENSORS FOR
COMPLEX SCENE MONITORING
Sanjeev Kumar and Claudio Piciarelli
Department of Mathematics and Computer Science, University of Udine
Via Della Sceinze 206, Udine- 33100, Italy
Keywords:
Disparity, Epipolar Geometry, Focal Ratio, PTZ Camera, SIFT Matching, Stereo Vision, Zero Padding.
Abstract:
The intelligent monitoring of complex scenes usually requires the adoption of different sensors depending
on the type of application (i.e. radar, sonar, chemical, etc.). From the past few years, monitoring is mainly
represented by visual-surveillance. In this field, the research has proposed great innovation improving the
surveillance from the standard CCTV to modern systems now able to infer behaviors in limited contexts.
Though, when environments allow the creation of complex scenes (i.e. crowds, clutter, etc.) robust solutions
are still far to be available. In particular, one of the major problems is represented by the occlusions that often
limit the performance of the algorithms. As matter of fact, the majority of the proposed visual surveillance
solutions processes the data flow generated by a single camera. These methods fail to correctly localize an
occluded object in the real environment. Stereo vision can be introduced to solve such a limit but the number
of needed sensors would double. Thus, to obtain the benefits of the stereo vision discharging some of its
drawbacks, a novel framework in stereo vision is proposed by adopting the sensors available in common
visual-surveillance networks. In particular, we will focus on the analysis of a stereo vision system which
is build from a pairs of heterogeneous sensors, i.e., static and PTZ cameras with a task to locate objects
accurately.
1 INTRODUCTION
The problems of understanding complex scenes and
detecting different moving objects (Foresti et al.,
2005) are hard to solve without an accurate localiza-
tion of the objects moving in the scene. Such a pro-
cess requires that any point in the image is associated
to a point in the real environment. This is possible
only by imposing some constraints (i.e. ground hy-
pothesis) that are not maintained in case of occluded
objects. To solve such a limit, stereo vision can be
performed better than a single camera processing.
Stereo vision is used to recover 3-D shape infor-
mation of a real world scene from two or more images
taken from different viewpoints (Faugeras, 1993). In
the existing literature, there are two research cate-
gories related to stereo vision. The first category re-
lies on the use of a monocular camera with known
scene information, and the second is the traditional
stereo vision using dual cameras systems. The best
example of latter one is human eyes system and a
lot of researches have been done on this category
(Forsyth and Ponce, 2003). The present work also
belongs to the second category.
In general, researchers use static and ideal cam-
eras (or homogeneous sensors) in the stereo vision for
their low cost and relative simpleness in modeling.
The problem of matching and rectification becomes
simple using homogeneous cameras (Brown et al.,
2003). As PTZ cameras are able to obtain more de-
grees of freedom and cover large field of view, a com-
bination of static and PTZ cameras is able to develop
more significant results when compared to results ob-
tained from a traditional stereo vision (Wan and Zhou,
2008). Apart from this fact, the precession of depth
can be increased by improving the image resolution,
since PTZ camera posses multi-resolution properties.
However, there are many difficulties in the implemen-
tation of a vision system which contains a combina-
tion of heterogeneous sensors for stereo vision task,
such as the variation in the internal and external pa-
rameters of PTZ camera in utility, variation in inten-
sities in two images for the corresponding pixels and
the most importantly the difference in resolution of
two images due to the different zoom setting of both
cameras. Therefore, the use of heterogeneous sensors
is more challenging than the traditional homogenous
approach, even though it can lead to better results.
551
Kumar S. and Piciarelli C. (2009).
STEREO VISION USING HETEROGENEOUS SENSORS FOR COMPLEX SCENE MONITORING.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 551-556
DOI: 10.5220/0001821105510556
Copyright
c
SciTePress

In this paper, a novel method for the stereo vision
is presented using pairs of heterogeneous images. To
achieve such a result, the focal ratio between the focal
lengths of the two images is computed for resizing the
narrower image. The resized image has homogeneous
focal information with respect to the wider image and
to make it homogenous in terms of image resolution,
zero padding is performed around the resized image.
Once the images are made homogeneous by these two
steps, then rectification process is run. Scale invari-
ant features (Lowe, 2004) and (Micheloni and Foresti,
2003) are detected from both images to obtain pairs of
matching points . Rectifying transformations are ob-
tained by solving a nonlinear constrained minimiza-
tion problem (Fusiello and Irsara, 2006), (Isgro and
Trucco, 1999). The gray-level values are normalized
in stereo images based on the intensities information
of matching pairs. Disparity values have been com-
puted to build range images from the given pairs of
stereo images (Scharstein and Szeliski, 2002). In the
disparity estimation, SSD criterion (Tao et al., 2001)
is used to find the best candidate for matching.
The rest of the paper is organized as follows: Sec-
tion 2 is devoted to the detailed description of trans-
forming process from heterogeneous to homogeneous
pair of images. In section 3, SIFT matching is ex-
plained. Section 4 contains the stereo matching pro-
cess. In section 5, experimental results using our
methodology are given and finally in section 6, the
concluding remarks are given.
2 TRANSFORMING PAIR INTO
HOMOGENEOUS IMAGES
The images captured by a pair of heterogenous cam-
eras have different imaging parameters. These make
the acquired images heterogeneous due to camera po-
sitions, orientations, zoom and illumination. If we di-
rectly perform the further operations like SIFT, recti-
fication and stereo matching on these images, the re-
sults would be affected by major performance degra-
dation. To overcome this difficulty, the pair of images
is made homogeneous before performing further op-
erations. The process to make the heterogeneous pair
of images as homogeneous is shown in Figure 1.
Let f
s
and f
d
be the focal lengths of the static and
the PTZ cameras respectively when images are cap-
tured. The focal ratio is R =
f
s
f
d
is computed and the
image captured by the PTZ camera is shrunk by a fac-
tor of R. The shrunk image is then made homoge-
neous with respect to the static image by performing
zero padding. Pairs of corresponding points (m
i
, m
′
i
)
are then extracted by exploiting a SIFT matching al-
gorithm. Such points are therefore used to compute
the rectification transformations H and H
′
by mini-
mizing
∑
i
(m
′
i
T
H
′T
F
∞
Hm
i
)
where F
∞
is the fundamental matrix for rectified
pair. To perform this minimization we choose the
Levenberg-Marquardt algorithm because of its effec-
tiveness and popularity. However, rectification pro-
cess is performed to simplify a stereo matching pro-
cedure, and if the first row of H and H
′
is not chosen
carefully in minimization, it may lead to a larger er-
ror and so failure in matching. Therefore, it is nec-
essary to introduce some constraints in minimization
process. Here, we have used the constraint that the
distance between corresponding epipolar lines along
vertical axis should be zero or very close to zero.
3 SIFT MATCHING
The process to obtain the matching points from the
pair of stereo images is divided into two steps. First,
we detect the scale invariant features in each image
separately. In the next step, matching process of these
features is performed between stereo pair of images.
The process of identifying locations in image
scale space that are invariant with respect to image
translation, scaling and rotation is based on the local-
ization of a key. This task can be performed in fol-
lowing steps:
1. Perform the convolution operation on input image
I with the Gaussian function with variance σ =
√
2. Let this operation gives an image I
1
.
2. Repeat the step 1 on image I
1
to get a new image
I
2
.
3. Subtract image I
2
from image I
1
to obtain the dif-
ference of Gaussian function as
√
2.
4. Resample the image I
2
using bilinear interpolation
with a pixel spacing of 1.5 in each direction. A
1.5 spacing means that each new sample will be a
constant linear combination of 4-adjacent pixels.
From this we generate a new pyramid level.
5. Determine the maxima and minima of this scale-
space function by comparing each pixel in the
pyramid to its neighbors.
6. Select key locations at maxima and minima of a
difference of Gaussian function applied in scale
space.
The scale invariant features can be detected from the
locations of these keys. These features are detected
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
552
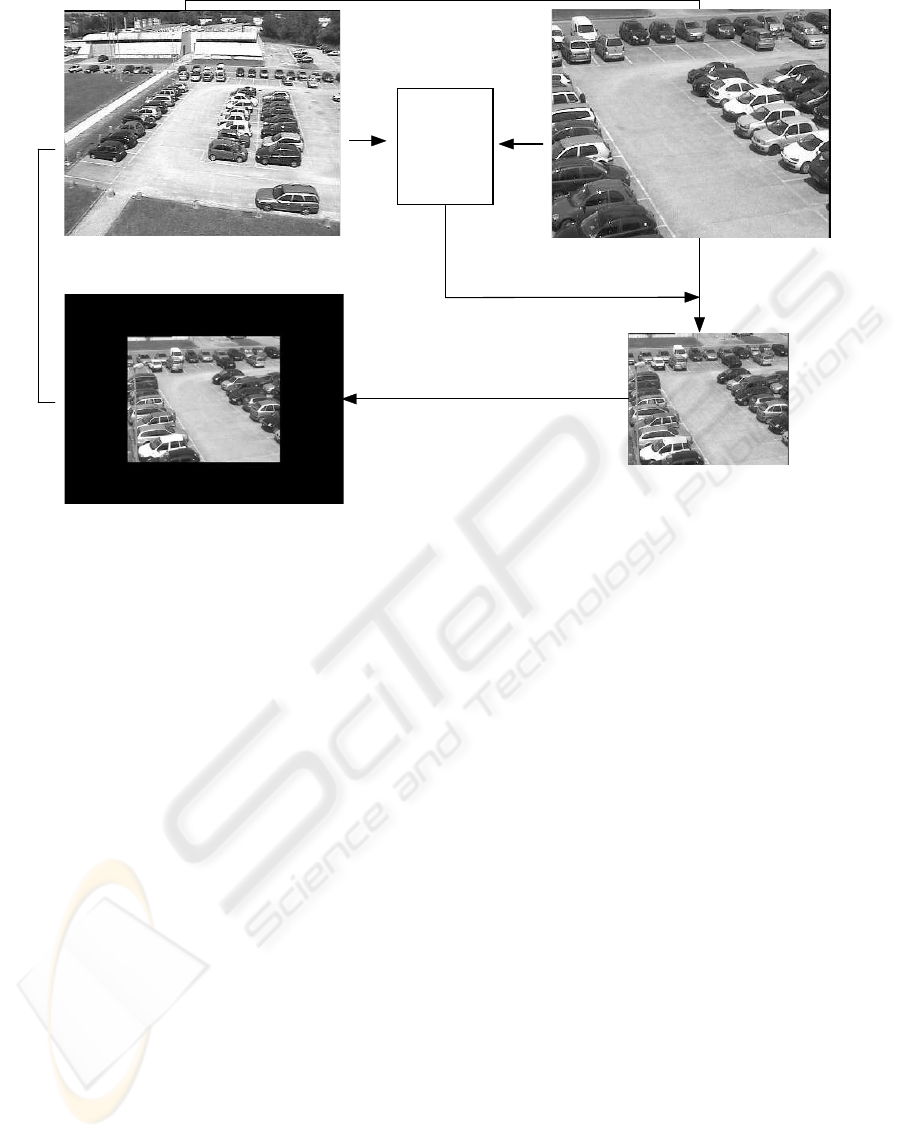
Calculate R
R=f
s
/f
d
Perform Zero Padding
w
s
x h
s
Resize based
on focal ratio
n
s
x p
s
Non-Homogeneousl Pair
Homogeneous Pair
w
d
x h
d
w'
d
x h'
d
w
s
x h
s
R * w
d
x h
d
=
Figure 1: Overall process to obtain the pair of homogeneous images.
on the exact key locations as well as locations around
it so that reliable matching between different views
of an object or scene can be performed. These fea-
tures are invariant to not only image orientation but
also image scale, and provide robust matching across
a substantial range of affine distortion, change in 3-D
viewpoint, addition of noise, and change in illumina-
tion. For stereo image matching, SIFT features are
extracted from left image and stored in a database.
The right image features are matched by individually
comparing each feature to this database and finding
candidate matching features based on Euclidean dis-
tance of their feature vectors. We have performed fea-
tures matching between stereo pair using the process
given in (Lowe, 2004). The process of rectification is
performed based on these pairs of matching points.
The RANSAC is used to remove the outliers from
the pairs of matching points obtained from SIFT.
More generally speaking, the basic assumption is that
the data consist of inliers,i.e., data points which can be
explained by some set of model parameters, and out-
liers which are data points that do not fit the model. In
addition, the data points are subject to noise. An ad-
vantage of RANSAC is its ability to robustly estimate
the model parameters. It finds reasonable estimates
of the parameters even if a high percentage of outliers
are present in the data set.
4 STEREO MATCHING
Once the pair of stereo images is rectified, the next
step is to compute disparity between the matching
pair. There are two approaches to obtain stereo
matching, i.e., feature based and pixel (region) based
methods. Due to the difference in intensities of stereo
images captured from heterogeneous sensors, these
methods can not be applied directly to obtain the
stereo matching. To avoid this problem, here we per-
form this process in two steps, i.e., a combination of
feature based and pixel based methods.
The first step is related to normalize the intensi-
ties in two images for the matching pairs. In order to
perform this task we detect the matching pixels using
SIFT matching from the pair of images. Then im-
age can be normalized by a simple algorithm, which
computes the parameters α, β of the gray level global
transformation
S
r
(x, y) = α S
l
(x, y) + β
by fitting a straight line between the intensities of all
matching pixels which are obtained using SIFT. Once
the values of α and β are computed then the left image
can be normalized in the range of right image.
For each pixel in the left image (reference im-
age I
l
), similarity scores are computed by compar-
ing a fixed, small window of size 5 ×5 centered on
STEREO VISION USING HETEROGENEOUS SENSORS FOR COMPLEX SCENE MONITORING
553

the pixel to a window in the right image (I
r
), shifting
along the corresponding horizontal scan line. Win-
dows are compared through the normalized SSD mea-
sure, which quantifies the difference between the in-
tensity patterns:
C =
∑
(ξ,η)
[I
l
(x+ ξ, y+ η) −I
r
(x+ d + ξ, y + η)]
q
∑
(ξ,η)
I
l
(x+ ξ, y+ η)
2
∑
(ξ,η)
I
r
(x+ ξ, y+ η)
2
where ξ ∈[−n, n] and η ∈[−m, m]. The disparity esti-
mate for pixel (x, y) is the one that minimizes the SSD
error:
d
0
(x, y) = arg min C(x, y, d)
However we can observe that squared differences
need to be computed only once for each disparity,
and the sum over the window need not be recomputed
from scratch when the window moves by one pixel.
5 RESULTS AND DISCUSSIONS
To evaluate the performance of the proposed frame-
work, several experiments have been conducted on
the images captured by a fixed and a PTZ cameras.
For each experiment, the left image of the stereo pair
does not change as it is captured by the static camera,
while the right image is different as it is captured by
the PTZ camera with four different zoom levels. The
focal length information has been acquired online for
these images and so the focal ratio. The SIFT match-
ing is performed to obtain the pairs of corresponding
points from the left and right images. The rectifica-
tion error has been computed in the rectified pair of
images using the criterion of the mean of the error in-
dex r
i
= |(Hm
i
)
y
−(H
′
m
′
i
)
y
|, i.e., the vertical distance
between corresponding epipolar line.
The given results aim to show the improved per-
formance of the proposed solution (using homoge-
neous images) over a method in which stereo pro-
cess is applied directly on heterogeneous images. The
first set of experiments consists in computing the er-
ror in rectification when the pair of images has been
obtained using identical focal lengths. Since the im-
age size of the two images is the same that implies the
two images are homogenous. In this context, Figure 2
presents the results for a pair of images having focal
ratio 1. The mean pixel error for rectified pair of im-
ages is 0.0696 when 10 pairs of matching points are
used.
Since the main goal of the proposed algorithm is
to perform stereo process on heterogeneous images,
we run a set of experiments by progressively reduc-
ing the focal ratio. In Figures 3, 4 and 5 , the results
(a) (b)
(c) (d)
(e)
Figure 2: Results for a pair of stereo images having focal
ratio 1.0. Left stereo image (a); right stereo image (b); rec-
tified stereo images (c & d); range image (e).
are shown for a pair of stereo images having focal ra-
tio 0.97, 0.94 and 0.90, respectively. As it can be seen
from these figures and from the results in table 1, the
proposed solution much better than standard stereo
matching on heterogeneous images.
The error in the rectified pairs is shown in table 1
for both the cases, i.e., when the rectification process
has been performed on heterogeneous and homoge-
neous pairs of stereo images. The error has been esti-
mated for different pairs which have different values
of focal ratio. It is clear from the table that the error
is high when the rectification process has been per-
formed directly using heterogeneous pairs of images
while the error is very small when the pairs of images
are made homogeneous before performing the rectifi-
cation process. Apart from this comparison, one more
thing is noticed about the difference between the qual-
ity of range images obtained from heterogeneous and
homogeneous pairs of images. In the range images
obtained from pairs of homogeneous images, the den-
sity is regularly decreasing as the distance of the ob-
ject is increasing along the optical axis, i.e., objects
near to camera have brighter intensity compared to
the far ones. This phenomenon is not so regular in
the range images which are obtained from the pairs of
heterogeneous images.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
554
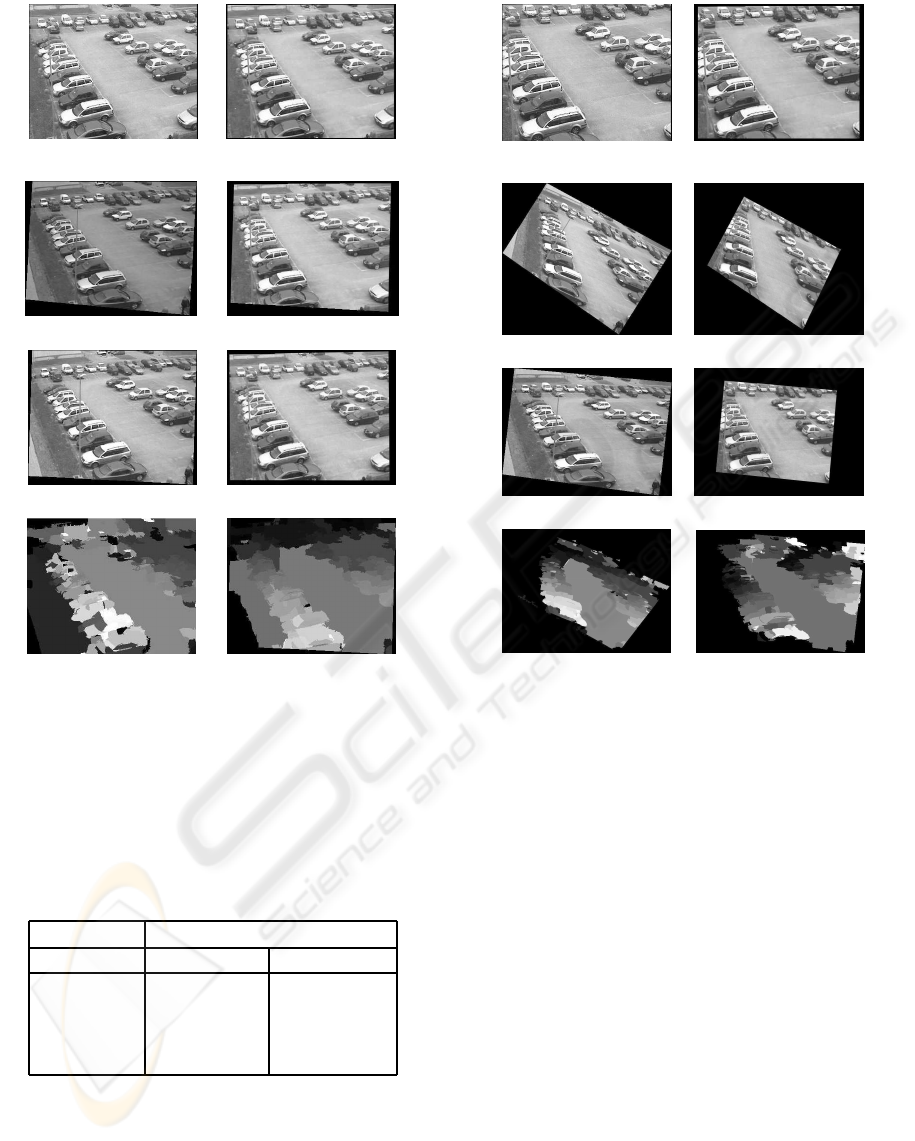
(a) (b)
(c) (d)
(e) (f)
(g) (h)
Figure 3: Results for a pair of stereo images having focal
ratio 0.97. Heterogeneous right image (a); homogeneous
right image (b); heterogeneous pair of rectified images (c
& d); homogeneous pair of rectified images (e & f); range
image using heterogeneous rect. pair of images (g); range
image using homogeneous rect. pair of images (h). Left
image of input stereo pair is same as in Figure 1(a).
Table 1: Mean Pixel-Error between corresponding epipolar
lines between the rectified pairs of images.
Focal Ratio Mean Error
Homo. Case Hetero. Case
1.00 0.0696 0.0696
0.97 0.0714 0.0698
0.94 0.2891 0.0743
0.90 0.3367 0.0984
6 CONCLUSIONS
We have presented a framework for stereo vision
using heterogeneous sensors to monitor a complex
scene. The pair of images has been made homoge-
(a) (b)
(c) (d)
(e) (f)
(g) (h)
Figure 4: Results for a pair of stereo images having focal
ratio 0.94. Heterogeneous right image (a); homogeneous
right image (b); heterogeneous pair of rectified images (c
& d); homogeneous pair of rectified images (e & f); range
image using heterogeneous rect. pair of images (g); range
image using homogeneous rect. pair of images (h). Left
image of input stereo pair is same as in Figure 1(a).
neous based on a focal ratio information and then by
performing zero padding on the shrunk image. The
pairs of corresponding points have been obtained us-
ing SIFT matching in stereo pair of images. The rec-
tification transformations have been obtained by solv-
ing a nonlinear optimization problem. Experimental
results show that the combination of static and PTZ
cameras gives good results only if the captured im-
ages are made homogenous. This approach thus leads
to better results if compared to a traditional stereo vi-
sion system in terms of depth accuracy when moni-
toring a complex scene.
STEREO VISION USING HETEROGENEOUS SENSORS FOR COMPLEX SCENE MONITORING
555

(a) (b)
(c) (d)
(e) (f)
(g) (h)
Figure 5: Results for a pair of stereo images having focal
ratio 0.90. Heterogeneous right image (a); homogeneous
right image (b); heterogeneous pair of rectified images (c
& d); homogeneous pair of rectified images (e & f); range
image using heterogeneous rect. pair of images (g); range
image using homogeneous rect. pair of images (h). Left
image of input stereo pair is same as in Figure 1(a).
ACKNOWLEDGEMENTS
This work was partially supported by the Italian Min-
istry of University and Scientific Research within the
framework of the project entitled Ambient Intelli-
gence: event analysis, sensor reconfiguration and
multimodal interfaces (2006-2008). Sanjeev Kumar
is also thankful to Department of Mathematics and
Computer Science, University of Udine for the finan-
cial support during this work under the grant MIUR
n. 179 dd. 29/01/2007 provided by Italian Ministry
of University and Scientific Research.
REFERENCES
Foresti,G.L., Micheloni, C. and Piciarelli, C. (2005). De-
tecting Moving People in Video Streams, Pattern
Recognition Letters, 26(15), 2232–2243.
Faugeras, O. (1993). Three-Dimensional Computer Vision,
MIT Press, Cambridge, MA, USA.
Forsyth, D.A. and Ponce, J. (2003). Computer Vision: A
Modern Approach, Prentice Hall.
Brown, M.J., Burschka, D. and Hager, G.D. (2003). Ad-
vances in computational stereo, IEEE trans. of Pattern
Analysis and Machine Intelligence, 25(8), 993–1008.
Fusiello, A., Irsara, L. (2006). Quasi-euclidean uncalibrated
epipolar rectification, Research Report RR 43/2006,
Department of Computer Scince, Univ. of Verona.
Isgro, F., Trucco, E. (1999). On robust rectification for un-
calibrated images, in proc. of IEEE International Con-
ference on Image Analysis and Processing.
Lowe, D.G. (2004). Distinctive image features from scale-
invariant keypoints, International Journal of Com-
puter Vision 60(2), 91–110.
Micheloni, C. and Foresti, G.L. (2003). Fast Good Features
Selection for Wide Area Monitoring, in proc. of IEEE
International Conference on Advanced Video and Sig-
nal Based Surveillance, Miami (FL), USA.
Scharstein, D. and Szeliski, R. (2002). A taxonomy and
evaluation of dense two-frame stereo correspondence
algorithms, Int. Journal of Computer Vision, 47(1-3),
7–42.
Tao, H., Sawhney, H.S. and Kumar, R. (2001), A global
matching framework for stereo computation, in proc.
of IEEE Int. Conferece on Computer Vision, 532–539.
Wan, D. and Zhou, J. (2008). Stereo vision using PTZ cam-
eras, Computer vision and Image Understanding, arti-
cle in press.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
556
