
SCALE ROBUST ADAPTIVE FEATURE DENSITY
APPROXIMATION FOR VISUAL OBJECT
REPRESENTATION AND TRACKING
C. Y. Liu, N. H. C. Yung
Laboratory for Intelligent Transportation Systems Research, Department of Electrical & Electronic Engineering
The University of Hong Kong, Pokfulam Road, Hong Kong SAR, China
R. G. Fang
Information Science & Engineering College, Zhejinang University, No.8 Zheda Road, Hangzhou, Zhejiang, China
Keywords: Tracking, Feature Scale Selection, Density Approximation, Bayesian Adaptation, MAP, EM.
Abstract: Feature density approximation (FDA) based visual object appearance representation is emerging as an
effective method for object tracking, but its challenges come from object’s complex motion (e.g. scaling,
rotation) and the consequent object’s appearance variation. The traditional adaptive FDA methods extract
features in fixed scales ignoring the object’s scale variation, and update FDA by sequential Maximum
Likelihood estimation, which lacks robustness for sparse data. In this paper, to solve the above challenges, a
robust multi-scale adaptive FDA object representation method is proposed for tracking, and its robust FDA
updating method is provided. This FDA achieve robustness by extracting features in the selected scale and
estimating feature density using a new likelihood function defined both by feature set and the feature’s
effectiveness probability. In FDA updating, robustness is achieved updating FDA in a Bayesian way by
MAP-EM algorithm using density prior knowledge extracted from historical density. Object complex
motion (e.g. scaling and rotation) is solved by correlating object appearance with its spatial alignment.
Experimental results show that this method is efficient for complex motion, and robust in adapting the
object appearance variation caused by changing scale, illumination, pose and viewing angel.
1 INTRODUCTION
Visual object tracking is widely demanded in traffic
management, pedestrian monitoring, and security
inspection. The challenge of visual object tracking is
that the changing illumination, changing object’s
pose, changing viewing angel and partial occlusion
will all change the object’s scale, size and visible
parts. Thus the low-level image features can not be
constantly detected across frames without variations,
as the feature probability density function (pdf) of
the object does not rely on every exact local feature
the methods representing an object’s as its pdf
approximations by feature density approximations
(FDA) have emerged as a effective object
representation for tracking. Those can be divided
into the two groups: parametric approximation and
non-parametric approximation. The parametric
approximation methods (e.g. Raja, Yu, Jepson et al)
used a Gaussian Mixture Model (GMM) to
approximate the object’s feature density and
Expectation-Maximization (Dempster et al) (EM) to
estimate the GMM parameters. To adapt to object’s
changing appearance, Raja et al update estimate
Maximum likelihood (ML) GMM parameter online
recursively. However, it is not able to cope with
complex motion (e.g. rotation and scaling) because
there’s no spatial information in their model. Yu &
Wu attempted to resolve this issue by extending
feature vector by pixel coordinates and track object
in an ML estimation process by EM algorithm.
Jepson et al developed a three components mixture
model to represent object appearance. They used
online ML estimation to update the model
parameters, but it’s not robust when observed data
are sparse (object moving in decreasing scale or
resolution). For non-parametric FDA methods,
Comaniciu et al used spatially weighted kernel
functions to represent target object and use mean-
shift to determine the kernels. Han et al proposal to
535
Liu C., Yung N. and G. Fang R. (2009).
SCALE ROBUST ADAPTIVE FEATURE DENSITY APPROXIMATION FOR VISUAL OBJECT REPRESENTATION AND TRACKING.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 535-540
DOI: 10.5220/0001802805350540
Copyright
c
SciTePress
use On-line learning to update kernel density to
adapt to object’s appearance variation. However, as
pointed by Carreira-Perpinan, the kernel density
derived by meanshift developed by Comaniciu et al
in the above methods is the ML estimation; it is not
capable in providing a robust estimate with sparse
data.
In this paper, to solve the above limitations, we
propose a robust multi-scale adaptive feature density
approximation (FDA) object representation method
for tracking, and provide its robust Bayesian
updating method using density’s prior knowledge
from historical frames. We also solve object
complex motion by correlating object appearance
with its spatial alignment. Experiment result shows
the effectiveness of this method.
This paper is organized as follow: in Section 2
we introduce the object representation for tracking,
and robust representation updating method; in
Section 3 the experiment and results are presented
and discussed; and the paper is concluded in Section
4.
2 ROBUST FDA FOR OBJECT
REPRESENTAION AND MAP
FDA UPDATING
In the proposed object representation method, scale
robustness is achieved in both feature extraction and
density estimation. The image features are extracted
from image patches in the selected scale and size
according to local image pattern. and the effective
probability for the features from each patch is
defined by the size of the patch. Using a new
likelihood function defined by the feature sets and
their effective probability, the Feature density is
estimated robustly to object changing scale. Based
on this representation, we also proposal how to
measure the compatibility between feature set and its
density representation for object tracking. To adapt
to an object’s changing appearance, we provide the
MAP-EM updating FDA updating method using the
density’s conjugate priors to transfer priori
knowledge in historical frames to current estimation
in a Bayesian way. To cope with object complex
motion (e.g. rotation and scaling) we correlate object
appearance with the appearance’s spatial alignment
by extend feature with spatial coordinates in the
coordinate system of the object itself. The following
gives the detail description for our method.
2.1 Scale Robust Reature Extraction
In our method, scale robust FDA is achieved in both
the stages of feature extraction and feature density
estimation. As image feature appears in its own scale
and size, the robust features should be extracted
accordingly. As in our previously works by Liu &
Yung, the method partition a frame into multi-scale
patches w.r.t. the scale and size of local feature, and
extract features on these patches. The process for
feature extraction is depicted in Fig. 1, a result is
demonstrated in Fig. 2.
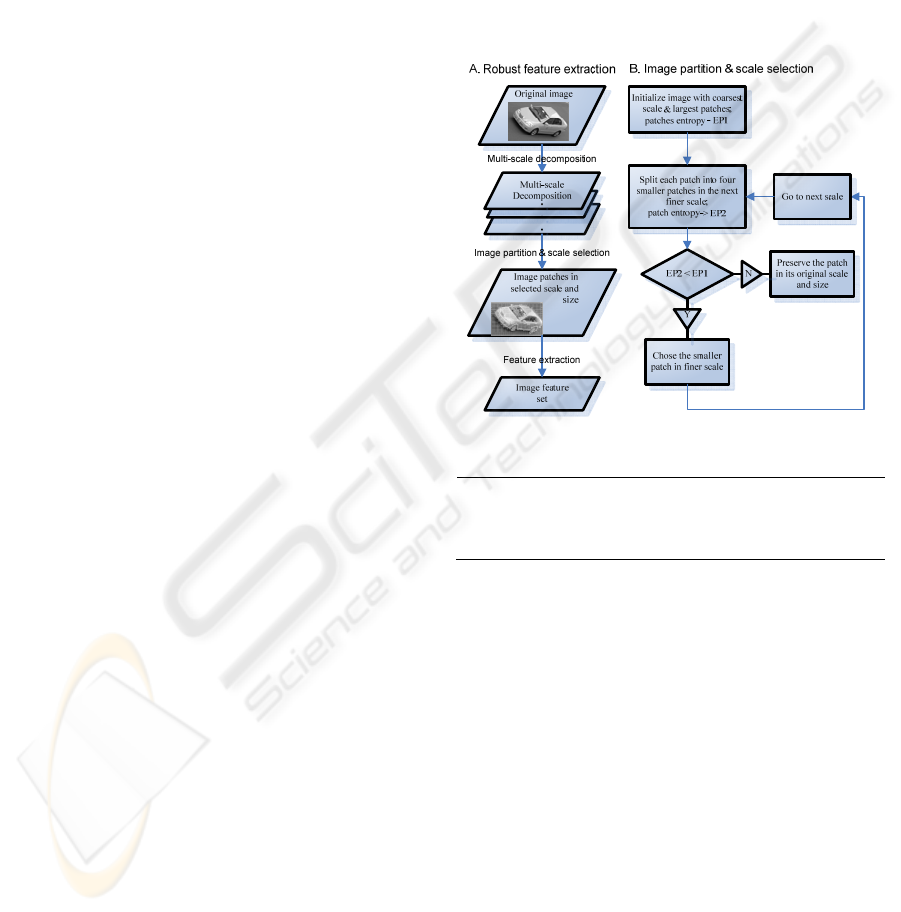
Figure 1: Robust feature extraction.
This figure depicts the process of scale-robust feature extraction.
Diagram A describes the data flow in this process; diagram describes
how a frame is partitioned into multi-scale patches. Here Lindeberg’s
multi-scale decomposition is used; as suggest by Timor et al, patches’
scale and size are select by comparing entropy across scale.
After frame partition, an effective
probability
creb
i
P
for each patch is defined on the
number of pixels in the patch, to control the
contribution of each patch’s feature in FDA.
creb
i
P
is
defined as:
max
/
creb
ii
P
Size Size=
(1)
To solve complex motion (e.g. rotation, scaling), the
model should acknowledge the object’s pose. This is
achieved through correlating the object appearance
feature with its spatial alignment by extending the
features’ dimension with the coordinate of patches’
geometry centre in the coordinate system of the
object itself (As depicted in Fig. 3) The
transformation between the coordinate system of the
object
11
(,)
x
y
and the coordinate system of original
frame
(, )
x
y
is:
11
cos sin
(, )( , )[ ]
sin cos
xy
xy xmym
θ
θ
θ
θ
=− −
−
,
(2)
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
536
where
(,)
xy
mm
is the center of the object,
θ
is the
rotation angel of object.
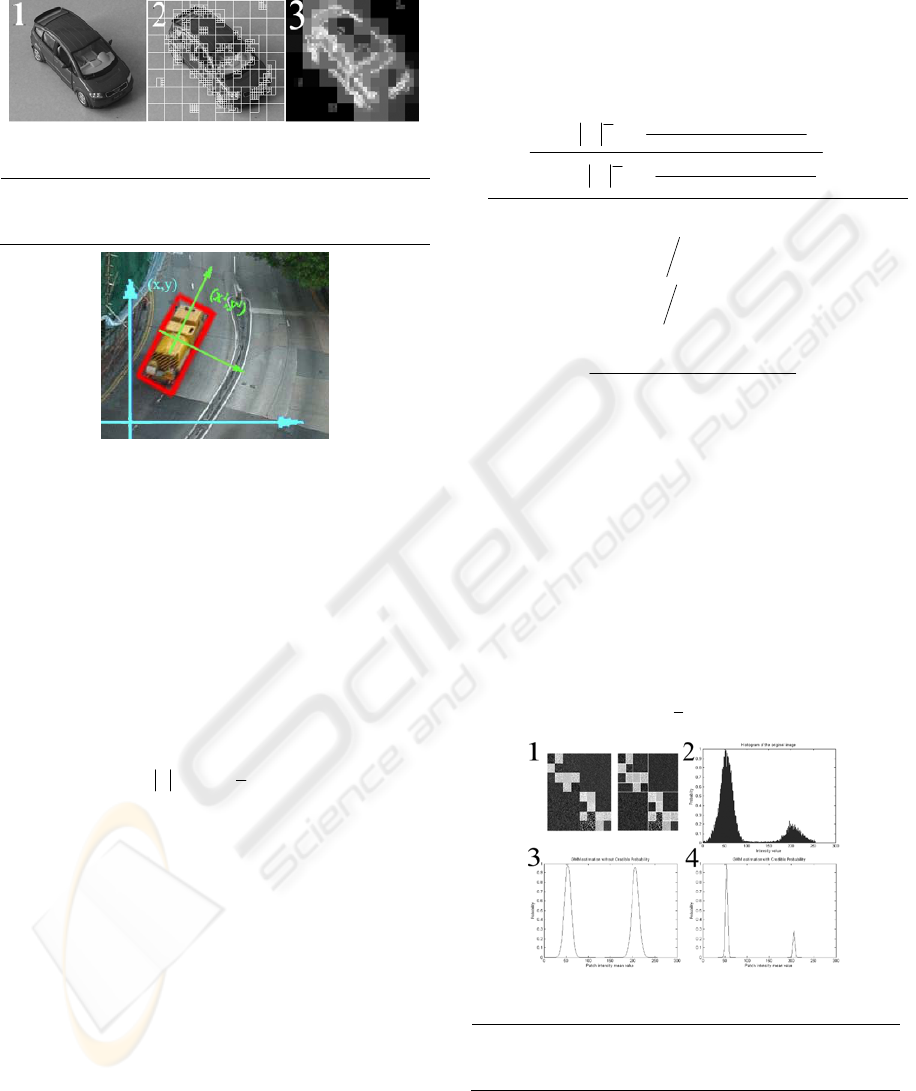
Figure 2: Multi-scale patches after image partition.
Image 1 is the original image; image 2 is the partition result. It should
be noted that the singularity regions are split into small patches in the
fine scale. In the homogeneous regions, large patches in a coarse scale
are retained. Image 3 is the final entropy map of each patch.
Figure 3: Coordinate system of the frame (blue) and.
coordinate system the object (green).
2.2 Robust Feature Density
Approximation
In this paper we approximate the object’s feature
density by a Gaussian Mixture Model:
1
( | ) ( | ; ); { ; }; { , },
M
ijijjjjjjj
j
Pp
θ
=
Ω= Ω= =
∑
x ω x ωθωθμΣ
(3)
where
j
ω
is its mixing coefficient,
1/2
1/2 1
1
(|;)(2) exp{()()}
2
T
ijj j j j
p
θπ
−
−−
=∑−−∑−x ω x μ x μ
is a
Gaussian component.
The robust FDA should be robust to both
object’s scale variation and the consequent variation
in image partition. As the features of large patches
correspond to the statistics of more pixels, they will
contribute more in FDA than the feature from
smaller patches. Therefore, a new likelihood
function defined by both the feature observations
and their effective probability, is used in GMM
estimation. The likelihood function is defined as:
1
11
11
(;) log (,;)
log [ ( | 1; ) ( 1) ]
[log ( | 1; ) log ( )],
creb
i
ij
N
P
ii
i
NM
z
creb
iij ij i
ij
NM
creb
ij i i ij j
ij
lP
Pz Pz P
zP P z P
ω
=
==
==
Ω=
===
==+
∏
∏∏
∑∑
Xxzθ
x θ
x θ
(4)
where
ij
z
is hidden variable indicating
i
x
is generated
by which one of the GMM components. Using
()l
Ω
in eq. (4), the Maximum Likelihood estimated
for GMM can be computed by EM algorithm:
,
}
2
)()(
exp{)(
}
2
)()(
exp{)(
],|[
:
1
,1
2
1
,1
2
1
∑
=
−
−
−
−
−∑−−
∑
−∑−−
∑
=
=
−
M
l
k
ji
k
j
Tk
ji
k
jj
k
ji
k
j
Tk
ji
k
jj
k
iijij
p
p
xzEh
s
tep
E
μxμx
ω
μxμx
ω
θ
(5)
11
1
11
11
1
1
1
:
()
()()
,
NN
creb creb
jiji i
ii
NN
kcrebcreb
jijii iji
ii
N
kkTcreb
ijij ij i
k
i
j
N
creb
ij i
i
Mstep
phPP
hP hP
hP
hP
==
+
==
++
+
=
=
−
=
=
−−
∑=
∑∑
∑∑
∑
∑
ω
μ x
x μ x μ
(6)
Fig. 4 compares effectiveness of the new
likelihood for FDA with conventional method which
doesn’t consider the relationship between the size of
the patch and the contribution of its feature in the
FDA. Our method solves the problem in
conventional method.
Based on this FDA object representation, our
method provides measure for tracking by measuring
the compatibility of an image region’s feature set to
a GMM by:
1
1
(|) { }
1
where exp{ ( ) ( )}
2
ij
ij
K
creb
jj i
jX
creb T
ji ijjij
X
PX P
P
ωφ
φ
=∈
−
∈
Ω=
=−−−
∑∑
∑
x
x
x μΣx μ
i
,
(7)
Figure 4: Comparison of FDA in simulation image.
In Figure 4, image 1 is the original image, image 2 is the image
histogram, and image 3 is the histogram estimated by conventional
method; whereas image 4 is the estimation by the proposed method. The
proposed method produces an accurate estimation.
SCALE ROBUST ADAPTIVE FEATURE DENSITY APPROXIMATION FOR VISUAL OBJECT REPRESENTATION
AND TRACKING
537
2.3 MAP-EM Updating
As object appearance change with changing
illumination, scale, pose, and viewing angel, its
GMM appearance representation thus should be
updated to adapt its changing appearance. As
compared by Gauvain et al and Goldberger et al,
MAP estimation can be more robust the ML for
sparse data (i.e. the feature set) because it utilize the
prior knowledge of the model parameter.
We improve the robustness of model updating
for sparse date by using the model prior knowledge
in GMM conjugate priors (ref. Gamerman) and
update GMM by its MAP estimate in a Bayesian
way. To achieve scale robustness we also use the
new likelihood function in e.q.(4). We derived the
updating methods using MAP-EM algorithm. MAP
estimation estimate the by maximizing the a
posteriori probability
() (;)()
MAP
pΩ= Ω ΩX
,
thus
Ω
is estimated by:
argmax{ ( ; ) ( )}p
Ω
Ω= Ω ΩX
,
(8)
The conjugate prior for the GMM is:
1
1
/2
1
/2
1/2 1 1 1
0 0
1
() ( ) ( , )
(2 )
(, ) | | exp[ ( ) ( ) ( )]
2
k
k
M
jj
j
M
Kd
j
j
M
j
d
T
jjj j j j j j j jj
j
pD g
ctr
α
α
π
η
αη
=
−
−
=
−
−−−
=
=
⎧⎫
⎪⎪
=×
⎨⎬
⎪⎪
⎩⎭
⎧⎫
⎪⎪
−− −−
⎨⎬
⎪⎪
⎩⎭
∏
∏
∏
θω| αμΣ
ω
ΣΣ μm Σμm ΣΣ
(9)
where
()D ω
|
α
is the Dirichlet density distribution
for mixing coefficients, and
1
K
α
>
is its parameter.
For the mean vector and the precision matrix (the
inverse of covariance matrix) in each GMM
Gaussian component, their conjugate priors are the
normal distribution and the Wishart distribution. As
suggested in Goldberger et al, give the
parameters
(,, ), 1...
jj j
jM
ω
=
μΣ
of the GMM of last
time step, the parameters of the GMM conjugate
prior at the current time step can be extracted as:
0
constant,
,,
,1,
jjjjjj
jj j j
ad
η
η
ηω η
ηαηω
=
===
=+ = +
m
μ
ΣΣ
(10)
Based on the conjugate prior and the new likelihood
function, the auxiliary function for MAP estimation
becomes:
'
11
'''
1
(|)log [(| 1;)( 1)]
log ( ) log ( , )
creb
iij
NM
P
z
iij ij
ij
M
jj
j
QPzPz
Dg
×
==
=
===
++
∏∏
∏
θθ x θ
ω | αμΣ
,
(11)
Therefore we obtained the MAP-EM GMM
updating method as:
'
1
:
(, )
[|,] ,
(, )
k
jjj
ij ij i
M
jjj
l
Estep
G
hEzx
G
ω
ω
=
−
==
∑
μΣ
θ
μΣ
(12)
'
1
1
'
1
1
'
1
1
,
()()()()
,
jj
N
creb
ij i j
i
j
N
creb
ij i
i
N
creb
ij i i j j
i
j
N
creb
ij i j
i
N
creb T T
iji ijij jjjjj jj
i
j
N
creb
ij i j
i
MStep
zP
zP
zP
zP
zP
zP
ηηω
ηω
ω
η
η
η
ηη
η
=
=
=
=
=
=
−
=
+
=
+
+
=
+
−−+− −+
∑=
+
∑
∑
∑
∑
∑
∑
x μ
μ
x
μ
x
μμ
m
μ
m Σ
(13)
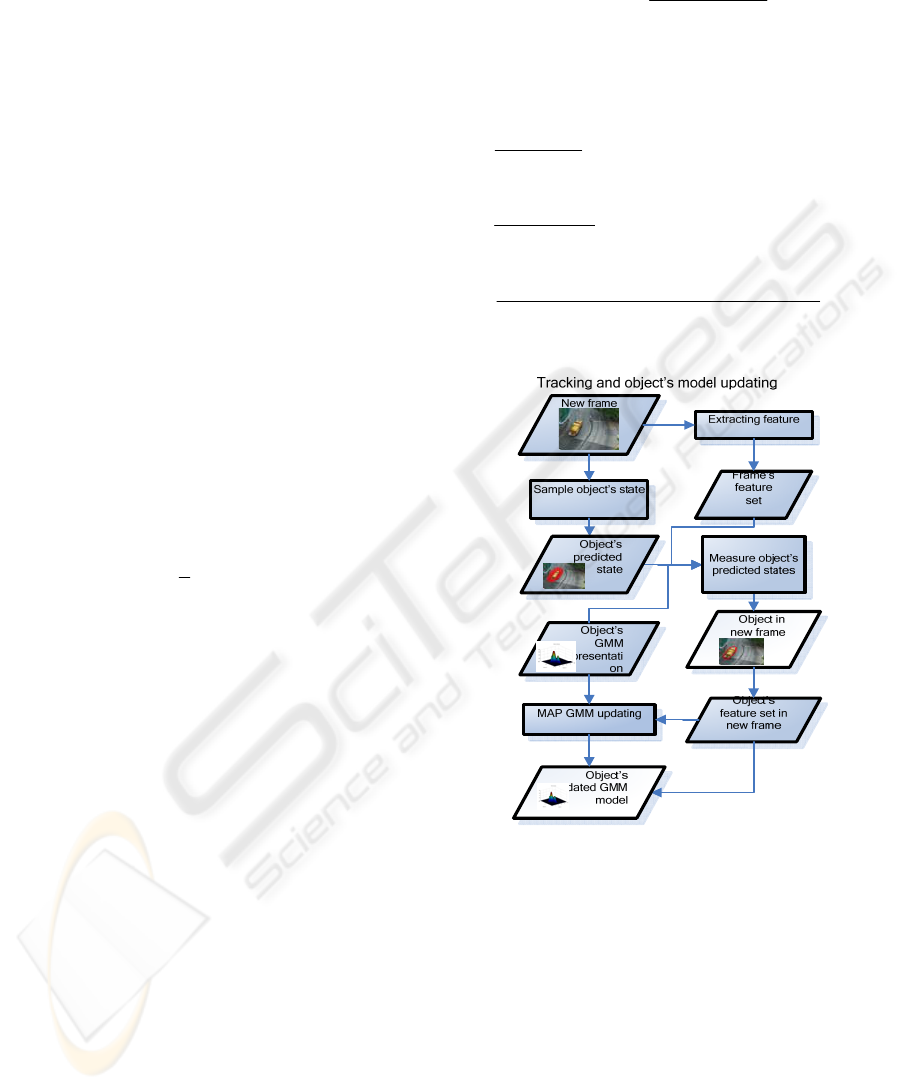
Figure 5: Object tracking and FDA model updating.
3 EXPERIMENTAL RESULTS
In the experiment, patches’ average value in Lab
colour space and centre coordinate are used as the
image feature vector; besides small patches, the
effectiveness of the non-homogeneous patches’
features are also tuned down according to entropy.
The state of the object is denoted as:
12
(, ,,)TT
φ
α
=
s
where
12
,,,,TT
φ
α
are the x, y
translation, rotation, and scaling of the object. The
object appearance is initialized using eq.(5), eq.(6);
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
538

Figure 6: Tracking with complex motion and scale variation.
Figure 7: Tracking with complex motion, scale/pose/illumination/appearance variation.
Figure 8: Tracking with appearance variation caused by changing illumination, changing pose, and changing scale.
then visual object is tracked by estimate the optimal
object state using the measurement form the
proposed FDA appearance representation in a
particle filter (Arulampalam et al) framework.
Specifically, the posterior probability of
s
is
approximated by a set of weighted discrete
particles
() () ()
1
1
{, }, 1
N
jjN j
iij i
j
ww
=
=
=
∑
t
, and its MAP estimate
is obtained by choosing the particle with the largest
weight. The posterior probability are recursively
updated by predict new particles and measure their
weights by eq.(7) with GMM and the feature set in
image region corresponding to each particle. I.e., the
predicted particle is sampled from:
()
1: 1 1 1
1
(| ) (| )
N
j
j
ii ii i
j
p
Gw
−−−
=
=
∑
sy st
, and their weights measured
by:
()
1:
1
(| ) ( |)
( | ) { }
ij
j
iiiii
K
creb
jj i
jX
wp p
PX P
ωφ
=∈
==
=Ω=
∑∑
x
ty yt
i
,
(14)
where and
i
y
is feature set in the image region of
particle
i
t . In model updating the GMM prior
knowledge is extracted form the last frame by
eq.(10), and the MAP-EM method in eq.(12),
eq.(13) is used for GMM updating.
Three experiments are given in Fig. 6~Fig.8. In
Fig. 6, the vehicle moves in decreasing scale and
change its pose by steering anti-clock wise. The
proposed method accurately tracks it with correct
scaling and rotation estimate, and capture its pose
SCALE ROBUST ADAPTIVE FEATURE DENSITY APPROXIMATION FOR VISUAL OBJECT REPRESENTATION
AND TRACKING
539

precisely even part of the object has moved out of
the image. In Fig. 7 & Fig. 8, tracking with
significant object appearance variation is tested. In
the two experiments, vehicles’ visible parts change
with its changing steering angel and view point; and
the shadow in Fig. 7 and highlight in Fig. 8 were
cast onto the vehicles when they move into the upper
part, they all bring significant appearance variations
to vehicles. The feature set for GMM updating
becomes sparse as the number of patches decreases
with vehicle’s decreasing scale. But in both
experiments the proposed method tracks the vehicle
accurately with correct pose (scaling & rotation)
estimate.
4 CONCLUSIONS
In this paper, to solve the above limitations in FDA
based object representation method in tracking, we
propose a robust multi-scale FDA object
representation method for tracking, and provide the
robust FDA updating method. Scale robustness is
achieved by both robust feature extraction and
robust density estimation. The Bayesian model
updating method is proposed using model prior
knowledge extracted from historical model.
Experiment shows the effectiveness of the method.
Our future directions could include explorations to
different features and tracking by multiple feature
fusion. Finally the aim is to develop it to a multiple
interacting objects tracking method.
REFERENCES
Arulampalam M. S., Maskell S., Gordon N., Clapp T.,
2002. “A tutorial on particle filters for online
nonlinear/non-Gaussian Bayesian tracking”. IEEE
Transactions on Signal Processing, Vol. 50(2),
pp.174-188.
Carreira-Perpinan M.A., 2007. “Gaussian Mean-Shift Is an
EM Algorithm”. IEEE Transactions on Pattern
Analysis and Machine Intelligence, Vol. 29(5), pp.767
– 776.
Comaniciu D., Meer P., 2002. “Mean Shift: A Robust
Approach toward Feature Space Analysis”, IEEE
Transactions on Pattern Analysis and Machine
Intelligence, Vol. 24(5), pp. 603-619.
Comaniciu D., Ramesh V., Meer P., 2003. “Kernel based
object tracking”. IEEE Transactions on Pattern
Analysis and Machine Intelligence, Vol. 25(5), pp. 564
– 577.
Dempster A. P., Laird N. M., Rubin D. B., 1977.
"Maximum Likelihood from Incomplete Data via the
EM Algorithm". Journal of the Royal Statistical
Society, Series B, Vol. 39, No. 1, pp.1-38.
Gamerman D., 1997. “Markov chain Monte Carlo:
stochastic simulation for Bayesian inference”.
CHAPMAN & HALL/CRC.
Gauvain J. L., Lee C.H., 1994. “Maximum a Posteriori
Estimation for Multivariate Gaussian Mixture
Observations of Markov Chains”. IEEE Transactions
on Speech and Audio Processing, 2(2):291-298.
Goldberger J., Greenspan H., 2006. “Context-based
segmentation of image sequences”. IEEE Transactions
on Pattern Analysis and Machine Intelligence, Vol.
28(3), pp. 463 – 468.
Han B., Comaniciu D., Zhu Y., Davis L., 2008.
“Sequential Kernel Density Approximation and Its
Application to Real-Time Visual Tracking”. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, Vol. 30(7), pp. 1186 – 1197.
Jepson A. D., D. Fleet J., El-Maraghi T. F., 2003. “Robust
online appearance models for visual tracking”. IEEE
Transactions on Pattern Analysis and Machine
Intelligence, Vol. 25(10), pp.1296- 1311.
Lindeberg T., 1994. “Scale-Space Theory in Computer
Vision”. Kluwer Academic Publishers, Dordrecht, the
Netherlands.
Liu C.Y., Yung N.H.C., 2008. “Multi-scale feature density
approximation for object representation and tracking”.
IASTED Signal Processing, Pattern Recognition and
Applications.
Raja Y., Mckenna S. J., Gong S., 1999. “Tracking color
objects using adaptive mixture models”. Image and
Vision Computing, Vol. 17(3-4), pp.225–231.
Timor K., Michael B.
,2001. “Saliency, Scale and Image
Description”, International Journal of Computer
Vision, 45(2), 83-105.
Yu T., Wu Y., 2006. “Differential Tracking based on
Spatial-Appearance Model (SAM)”, Proceedings of
the IEEE CVPR2006, Vol.1(17-22), pp.720-727, New
York City, NY.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
540
