
IMAGE SIGNAL PROCESSING FOR VISUAL DOOR PASSING
WITH AN OMNIDIRECTIONAL CAMERA
Luis-Felipe Posada, Thomas Nierobisch, Frank Hoffmann and Torsten Bertram
Chair of Control System Engineering, Technische Universit¨at Dortmund, Dortmund, Germany
Keywords:
Omnidirectional vision, Door passing, Robotic behaviour, Visual navigation, Door detection, Visual servoing.
Abstract:
This paper proposes a novel framework for vision based door traversal that contributes to the ultimate goal
of purely vision based mobile robot navigation. The door detection, door tracking and door traversal is ac-
complished by processing omnidirectional images. In door detection candidate line segments detected in the
image are grouped and matched with prototypical door patterns. In door localisation and tracking a Kalman
filter aggregates the visual information with the robots odometry. Door traversal is accomplished by a 2D
visual servoing approach. The feasibility and robustness of the scheme are confirmed and validated in several
robotic experiments in an office environment.
1 INTRODUCTION
Vision plays an increasingly prominent role in au-
tonomous navigation of mobile robots (DeSouza and
Kak, 2002). This development is on the one hand
driven by the exponential increase in performance of
modern cameras and computers at increasingly eco-
nomic costs. On the other hand robotic researchers
learn to harvest the broad spectrum of robust and ef-
fective low-, mid- and high-level vision algorithms
developed by the computer vision community over
the past two decades for the purpose of robot localisa-
tion, map building and navigation. In that context this
paper contributes to the development of vision based
robot navigation.
Door traversal is a vital skill for autonomous mo-
bile robots operating in indoor environments. Robust
and reliable door passing is feasible with laser range
scanners as their angular resolution provides suffi-
cient information to distinguish among open doors
and other objects such as tables and shelves. How-
ever 2D laser range scanner are not suitable for the
detection of closed or partially opened doors (Jens-
felt, 2001). Equipment of mobile robots with a laser
range scanner contributes significantly to the overall
cost of the mobile platform.
Door passing that relies on sonar sensors is fea-
sible in some scenarios but is in general not robust
and reliable enough to be applicable in all office envi-
ronments (Budenske and Gini, 1994). In the context
of door detection and door passing vision provides
an economic albeit reliable alternative to proximity
sensors such as sonar or laser range scanner. How-
ever, the robust visual detection and localization of
doors remains a challenging task despite a number of
successful implementations in the past (Eberst et al.,
2000; Shi and Samarabandu, 2006; Stoeter et al.,
2000; Patel et al., 2002; Murillo et al., 2008).
The authors in (Stoeter et al., 2000) detect doors
by means of a monocular camera in conjunction with
sonar. The visual door detection is restricted to large
views and rests on the assumption of a priori knowl-
edge of the door and corridor dimensions. The final
door detection at close range relies on sonar informa-
tion only.
In (Monasterio et al., 2002) the authors employ a
Sobel edge detector combined with dilatation and a
filtering operation to detect doors in monocular im-
ages. The final door identification employs an arti-
ficial neural network to classify the presence or ab-
sence of a door based on the sonar data. Initially
the robot approaches the door based on the pose es-
timated from visual information. The final approach
and door traversal relies on sonar data. The approach
rests on the assumption that the robot initially already
faces the door, which excludes more realistic scenar-
ios in which the robot travels along a corridor with
parallel orientation to the doors.
The door traversal approach by (Eberst et al.,
2000) is robust with respect to individual pose er-
rors, scene complexity and lighting conditions as door
hypothesis are filtered and verified for consistency
472
Felipe Posada L., Nierobisch T., Hoffmann F. and Bertram T. (2009).
IMAGE SIGNAL PROCESSING FOR VISUAL DOOR PASSING WITH AN OMNIDIRECTIONAL CAMERA.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 473-480
DOI: 10.5220/0001791404730480
Copyright
c
SciTePress
across multiple views. The door detection relies on
a binocular pan-tilt camera system whereas our ap-
proach uses an omnidirectional camera. An omni-
directional view offers the advantage that an initial
scan of the environment for doors executed by ro-
tating the robot base becomes obsolete. In addition
the omniview guarantees that the door remains visi-
ble throughout the entire door traversal whereas with
a conventionalperspective camera the door eventually
leaves the field of the view such that the final stage of
door traversal is performed open loop. The omniview
also offers an advantage in scenarios with semi open
doors in which the robot still detects the door in the
rear view after it has passed the door leaf.
Omnidirectional vision for door traversing has
also been investigated by (Patel et al., 2002). How-
ever the suggested solution is based on depth infor-
mation obtained from a laser sensor to guide a mobile
platform through a doorway.
To our best knowledge there is still no proposed
solution that handles the three problems of door de-
tection, localisation and door traversal in a coherent
purely vision based framework. The majority of pro-
posed solutions rely on range sensors in one way or
another. Even though the underlying methods for im-
age processing and door frame recognition are stan-
dard, our approach is novel as it provides a robust
and coherent solution to the entire door detection and
navigation problem relying in omnidirectional vision
only.
Images contain a large amount of information
which necessitates the filtering, extraction and inter-
pretation of those image features that are relevant to
the task. Similar to other approaches in the past our
door detection scheme relies on a door frame model
composed of two vertical door posts in conjunction
with a horizontal top segment. The image process-
ing of edges involves edge detection, thinning, gap
bridging, pruning and edge linking. Individual edge
segments are aggregated into lines by means of line
approximation, line segmentation, horizontal and ver-
tical line selection and line merging. Finally the lines
extracted from the omnidirectional image are com-
pared with the door frame model which upon success-
fully matching constitute door hypotheses. These hy-
potheses are tracked over multiple frames and even-
tually confirmed. The position of the door relative to
robot frame is estimated by a Kalman filter that aggre-
gates the robot motion with the door perception. The
vision based door recognition and traversal problem
is structured into the three steps: 1) door detection 2)
door localisation and tracking and 3) door traversal
which are discussed in the three following sections
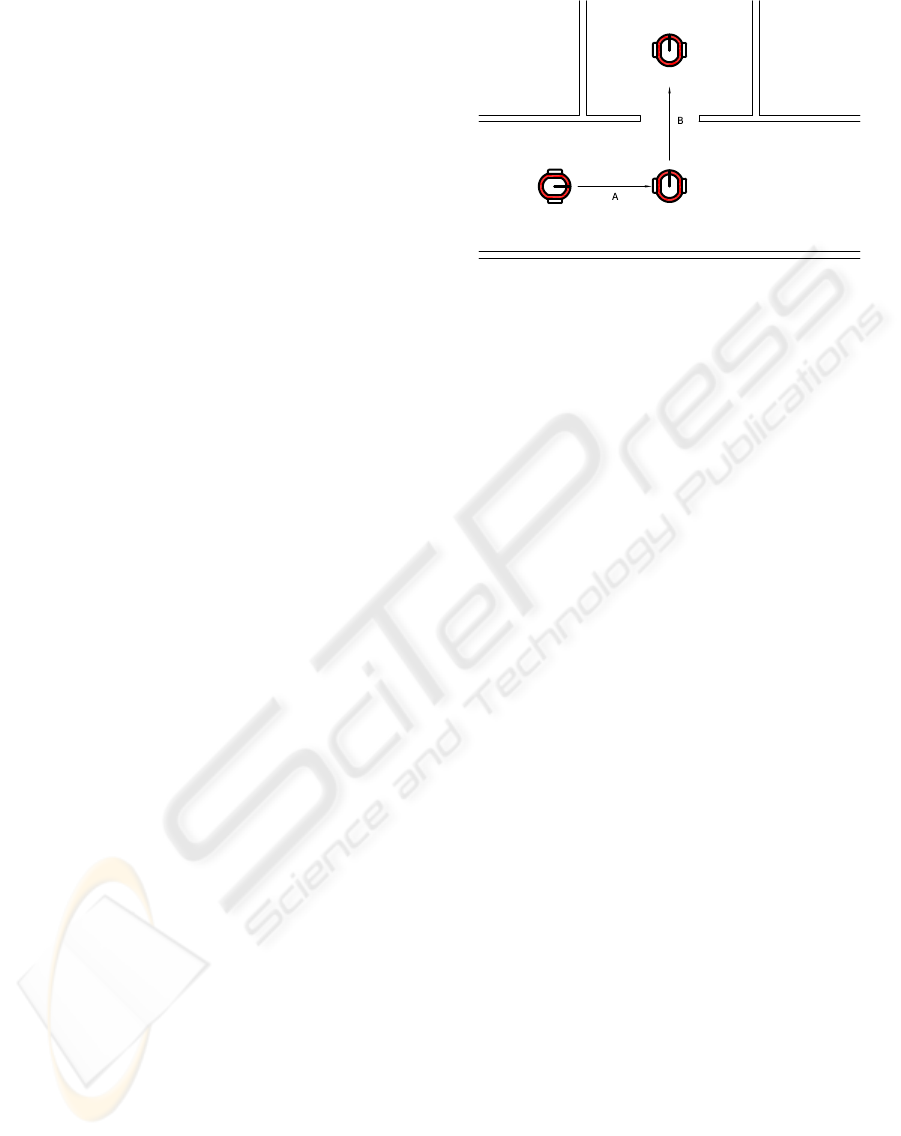
and are illustrated in figure 1. Section 4 reports ex-
Figure 1: A) Vision based door detection, door localisation
and tracking B) Door traversal by visual servoing.
perimental results of the door traversal in our office
environment. The paper concludes with a summary
and outlook in section 5.
2 DOOR DETECTION
The mobile robot Pioneer 3DX is equipped with an
omnidirectional camera which provides a 360
◦
view
of the scene. Catadioptric cameras employ a com-
bination of lenses and mirrors. Our camera obeys
the single viewpoint property, which is a requirement
for the generation of pure perspective images from
the sensed images. A formal treatment of catadiop-
tric systems is provided by (Baker and Nayar, 1998;
Geyer and Daniilidis, 2001).
The robot navigates through the environment by
means of a topological map. The door detection al-
gorithm is designated to detect doors from arbitrary
robot view points, including lateral and rear views.
The door detection relies on door frame recogni-
tion and thus rests on the reasonable assumption that
the door frame contrasts with the surrounding back-
ground. The map provides no prior information on
door locations, however in conjunction with a mis-
sion plan it enables the robot to either traverse the left
or right of two opposite doors in a corridor.
The door detection is composed into three subse-
quent fundamental steps: image processing, line pro-
cessing and door frame recognition. The image pro-
cessing is executed in the image space; hence, the pro-
cessed entities are pixels. The line processing is per-
formed in Cartesian coordinates and the entities han-
dled are lines. Finally, the detected lines and their spa-
tial relationship are interpreted to recognize the door.
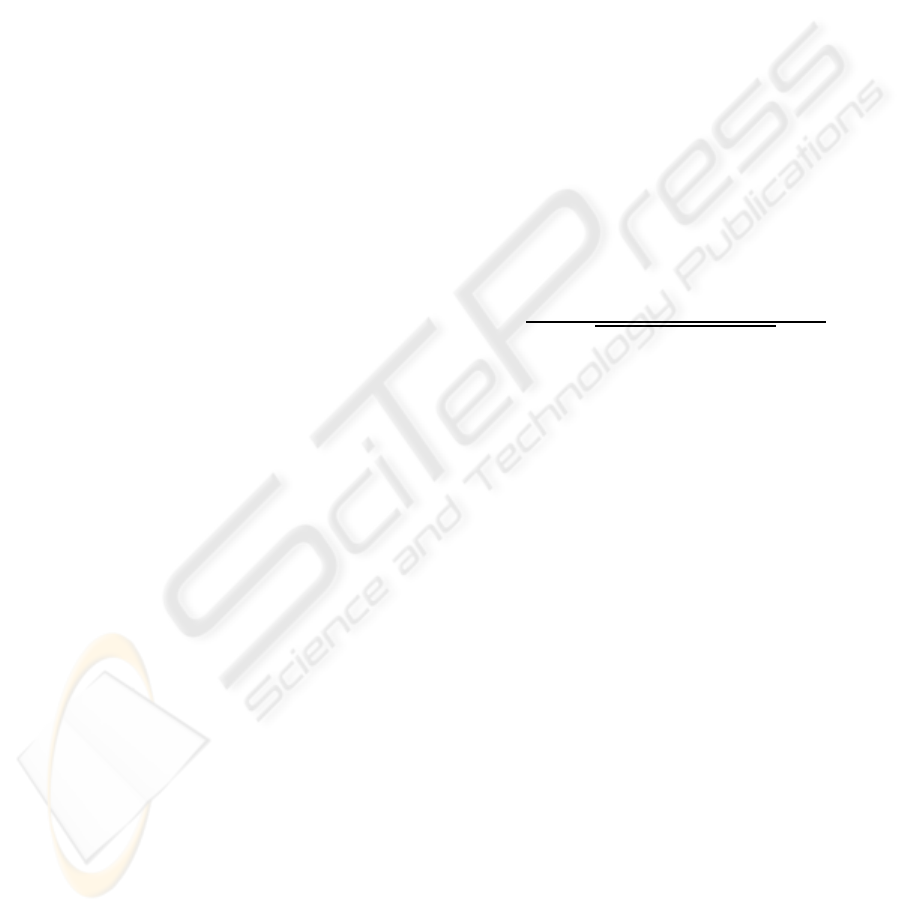
Figure 2 illustrates the visual door detection with piv-
otal processing steps.
IMAGE SIGNAL PROCESSING FOR VISUAL DOOR PASSING WITH AN OMNIDIRECTIONAL CAMERA
473
2.1 Image Processing
Histogram equalization is applied to the original im-
age I
O
with the objective of obtaining full dynamic
range of gray levels. Edges define regions in the
image at which the intensity level changes abruptly.
Our scheme employs the well known Canny edge
detection algorithm (Canny, 1986) not only because
it is still the most common edge detector in the vi-
sion community, but because is maximizes the signal-
to-noise ratio and generates a single response per
edge. The Canny edge detector consists of a Gaus-
sian smoothing filter with a kernel of nine pixels
and σ = 1.85, non-maximum suppression and edge
thresholding with lower and upper thresholds of 15
and 30.
Morphological image processing is a useful tech-
nique for noise removal, image enhancement and im-
age segmentation. The image obtained from mor-
phological processing, edge detection and contrast
stretching is shown in figure 2b. The following mor-
phological operations are applied to the binary edge
image.
• Thinning is a so called hit-or-miss transforma-
tion that is similar to erosion and dilation. The
structuring element is applied to all pixels, in case
the image pixels match the structuring element
the correspondingimage pixel is set to foreground
(1), otherwise it is set to background (0).
• Gap Bridging bridges disconnected groups of
pixels. Gap bridging is also defined in terms of
hit-or-miss transformations and is applied itera-
tively until it produces no further changes to the
image.
• Pruning is an operation to complement thinning
as it is intended to remove spurs that remain after
thinning.
• Isolated Pixel Removal eliminates all isolated
foreground pixels that are surrounded by back-
ground pixels.
The edge detection and morphological processes
characterizes individual pixels as edge pixels, but do
not consider their connectivity. The edge linking
groups these pixels into sets of connected pixels bet-
ter suited for subsequent processing. We applied edge
linking by contour following described in (Kovesi,
2000) as shown in figure 2c.
2.2 Line Processing
The previous operations are performed on pixel level,
whereas line processing decomposes a curved con-
tour into a sequence of straight lines. The generated
straight line segments are classified into horizontal,
vertical and randomly oriented lines, of which the first
two are relevant for door detection.
Several techniques are reported in the literature for
edge linking and boundary detection such as global
processing via Hough transform (Duda and Hart,
1972), RANSAC fitting or local processing by linking
pixels analyzing relations in a small neighborhood.
Our experience in experiments reveals that the Hough
transform fails to detect many meaningful line struc-
tures required for door detection.
We employ a split approach to partition the linked
contours into straight line segments. A straight line
through two points (x
1
,y
1
) and (x
2
,y
2
) is represented
by:
x(y
1
− y
2
) + y(x
2
− x
1
) + y
2
x
1
− y
1
x
2
= 0 (1)
Contours are represented by ordered lists of con-
nected pixels. In the first step the contour is globally
approximated by a straight line connecting the first
and final pixel. The pixel (x,y) of maximum orthogo-
nal distance
d =
x(y
1
− y
2
) + y(x
2
− x
1
) + y
2
x
1
− y
1
x
2
)
p
(x
1
− x
2
)
2
+ (y
1
− y
2
)
2
(2)
to the line is identified. The original line is split
into two straight line segments, in which the max-
imum distance pixel becomes the end point of the
first segment and the starting point of the second seg-
ment. This segmentation is recursively repeated until
all pixels are located with a distance of less than 2 pix-
els with respect to their associated straight line. The
straight line segmentation results are shown in figure
2d.
The resulting lines are classified into vertical lines,
that are potential candidates for door posts, horizontal
lines as candidates for the horizontal door case and
others not part of door frames.
The lines are classified according to the angle be-
tween the line itself and the radial line going through
the central principal point. Lines with an angle of 15
◦
are considered vertical and with an angle of 45
◦
hori-
zontal. All other lines are discarded. These thresholds
are obtained in several tests with different omnidirec-
tional images containing doors of different position
and size. The result of the segmentation is shown in
figure 2e.
The upper horizontal part of the door case are ex-
pected to emerge in the central region of the omnidi-
rectional image corresponding to higher elevation. In
addition the segment is supposed to be of a minimal
length. The horizontal candidate lines are selected if
their length is between 5 % and 20 % of the image
radius and the distance to the center is between 17 %
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
474
(a) Original image (b) Morphological processing,
edge detection and contrast
stretching
(c) Edge linking
(d) Line approximation of (c) (e) Vertical/Horizontal line seg-
mentation of (d)
(f) Deletion of incorrect lines in (e)
(g) Merging collinear lines in (f) (h) Double/Single lines segmenta-
tion of (g) and deletion of incorrect
vertical lines
(i) Detected door frames in (h)
Figure 2: Overview of image processing steps in door detection.
and 28 % of the image radius. The results of the door
frame line selection are shown in figure 2f.
Since the vertical door posts are substantially
longer, it is fairly likely that the corresponding line
segments are disconnected due to noise, non-uniform
illumination and other effects. Therefore it is neces-
sary to merge disconnected vertical lines prior to the
detection of vertical door posts. Lines are merged if
they are collinear and the gap between the segments
is small compared to their overall length. The results
of vertical line merging are shown in figure 2g.
Door frames often generate two parallel edges in
the image corresponding to the inner and outer edge
of the door case. Prior to door detection parallel,
nearby edges of similar length are grouped into so
called double vertical and horizontal lines. For the
purpose of door pose estimation the double line is ge-
ometrically represented by the center of both lines.
IMAGE SIGNAL PROCESSING FOR VISUAL DOOR PASSING WITH AN OMNIDIRECTIONAL CAMERA
475
The presence of double lines is a strong indicator for
a door. Eventually all lines are either double vertical
lines, single vertical lines, double horizontal lines and
single horizontal lines as shown in figure 2h.
2.3 Door Frame Recognition
The final step in the door detection comprehends the
matching between plausible combinations of verti-
cal and horizontal lines with multiple potential door
frame patterns. In general a door frame is described
by two vertical and one horizontal line which end-
points coincide. In practice part of the door frame
might be occluded such that two line configurations
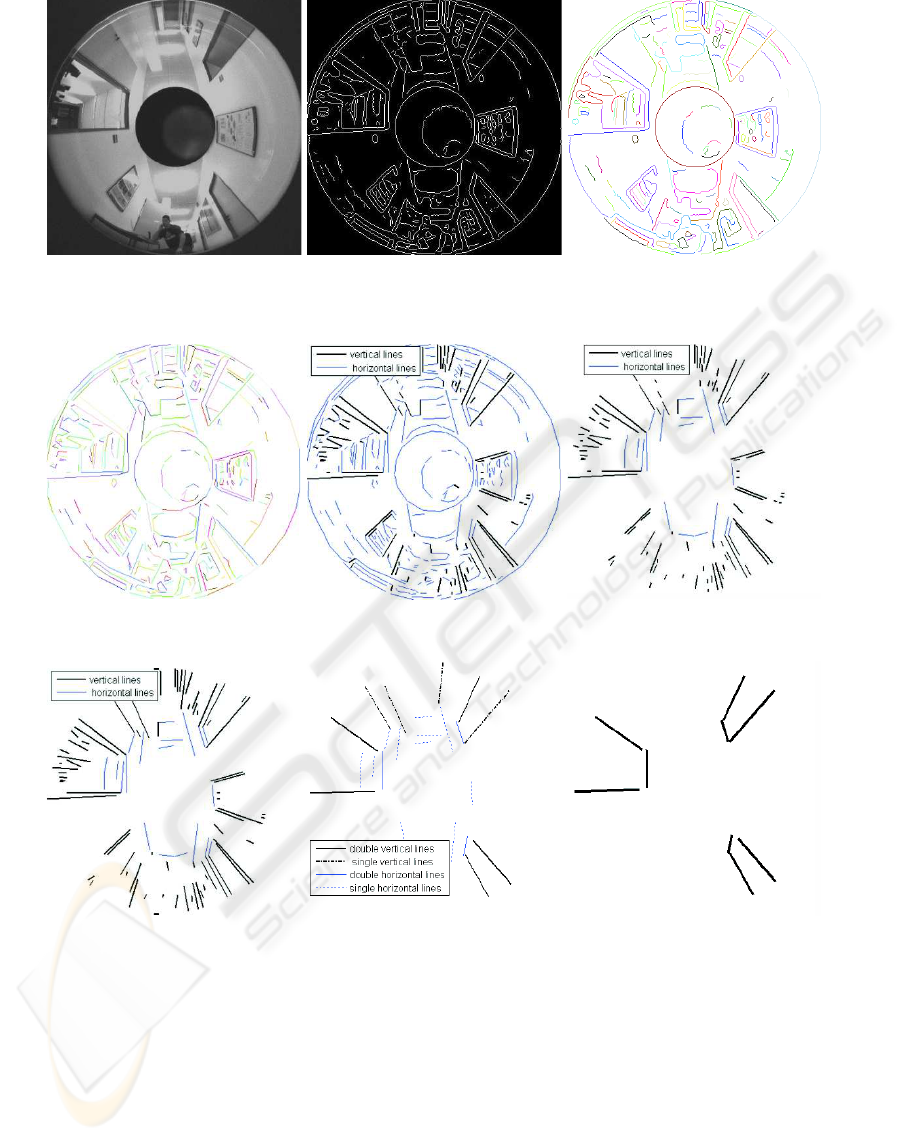
are also considered. Figure 3 shows the possible com-
binations of single and double lines that are matched
with the lines detected in the image. These door
patterns are inspired by the work of (Munoz-Salinas
et al., 2004), which defines simple and double door
frames. The patterns containing double lines are
more meaningful and are therefore matched first. The
matching proceeds from the most distinctive pattern
a) to less discriminative structure j). In our final im-
plementation only the patterns a) to h) are eventually
associated with doors as the remaining patterns i) and
j) are ambiguous and tend to produce too many false
positives. The results after the door pattern matching
are shown in figure 2i.
Figure 3: Possible door frame patterns sorted by priority.
3 DOOR LOCALISATION,
TRACKING AND TRAVERSAL
3.1 Door Localisation and Tracking
Door localisation estimates the robots current pose
(x,y,θ) with respect to the door. In case of monoc-
ular cameras the robot pose is usually recovered by
triangulation of features from multiple captures taken
from different viewpoints. In the literature this local-
ization scheme is known as bearing only localization.
The built-in odometer estimates the relative robot mo-
tion between consecutive viewpoints. Since both the
measurement and the motion are subject to noise and
errors, the robot position with respect to the door is
estimated with an extended Kalman filter (EKF). The
state prediction of the EKF relies on the odometry
motion model, which describes the relative robot mo-
tion between two consecutive poses by three basic
motions: an initial rotation δ
rot1
followed by a straight
motion δ
trans
and a final rotation δ
rot2
. The odometry
model predicts the relative robot motion between con-
secutive states (Thrun et al., 2005):
x
−
t
=
x
−
t
y
−
t
θ
−
t
=
x
+
t−1
y
+
t−1
θ
+
t−1
+
δ
trans
cos(θ
t−1
+ δ
rot1
)
δ
trans
sin(θ
t−1
+ δ
rot1
)
δ
rot1
+ δ
rot2
(3)
in which the superscript (-) denotes the a priori esti-
mate of the process model and the superscript(+) in-
dicates the a posteriori estimate after the correction
step.
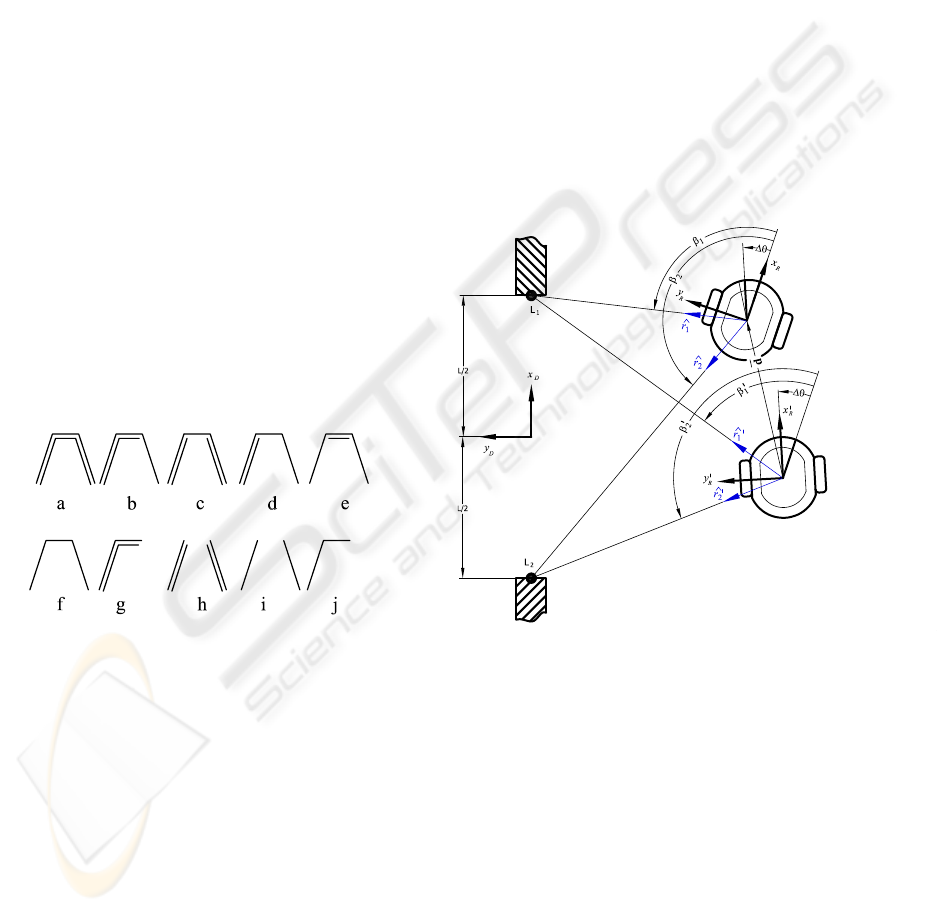
Figure 4: Robot position from bearing.
Figure 4 shows the door coordinate frame <
x
D
,y
D
> located at the center of the door and the
two robot coordinate frame at two consecutive poses
< x
′
R
,y
′
R
> and < x
R
,y
R
>.
The location of the door posts L
1
,L
2
in robocentric
coordinates are represented by
r
1,2
= k
1,2
cos(β
1,2
)
sin(β
1,2
)
(4)
The door post L
1
,L
2
with respect to the current
robot coordinate frame are recovered by triangulation
from the two robot poses according to
r
1,2
= k
1,2
ˆ
r
1,2
= k
′
1,2
ˆ
r
′
1,2
− d (5)
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
476

in which d denotes the relative motion between both
poses.
Solving equations 4 and 5 for k
1,2
, the door pose
with respect to the current robot coordinate frame is
given by:
x
d
y
d
θ
d
=
(k
1
cos(β
1
) + k
2
cos(β
2
))/2
(k
1
sin(β
1
) + k
2
sin(β
2
))/2
arctan
k
1
sin(β
1
)−k
2
sin(β
2
)
k
1
cos(β
1
)−k
2
sin(β2)
(6)
The robot pose with respect to the door frame pre-
dicted from the bearing angles is computed as:
z
t
=
−x
d
cos(θ
d
) − y
d
sin(θ
d
)
x
d
sin(θ
d
) − y
d
cos(θ
d
)
−θ
d
(7)
In the correction step of the Kalman filter the pos-
teriori state estimate is obtained by:
x
+
t
= x
−
t
+ K
t
(z
t
− x
−
t
) (8)
in which the Kalman gain K
t
depends on the ratio
of measurement and process covariance. The mea-
surement error covariance is determined by a prior
off-line analysis of door post triangulation accuracy
to σ
2
x
= 1 , σ
2
y
= 1 and σ
2
θ
= 0.5. The Kalman filter
is initialized based on the first two consecutive mea-
surements of door post bearings.
3.2 Door Traversal
Typically the door is detected in the image for the first
time at a separation between robot and door of about
two to three meters. The door is tracked continuously
by means of the Kalman filter while the robot con-
tinues its motion parallel to the corridor. The robot
stops once it is located laterally with respect to the
door center. At this instance it executes a 90 ° turn
towards the door while continuously tracking its rela-
tive orientation.
Before initiating the traversal the open door state
is verified from a single image and a sonar scan as
a failsafe. The region between the door posts is an-
alyzed in terms of its texture. A homogeneous tex-
ture indicates a closed door, whereas random texture
implies an open door. The sonar scan is merely a fail-
safe confirmation of the visual classification, no sonar
range data is needed for controlling the subsequent
traversal. The robot traverses the door at constant ve-
locity by centering itself with respect to the continu-
ously tracked door posts. The visual servoing controls
the robots turn rate such both door posts remain equi-
lateral in the omnidirectional view. The Kalman filter
is no longer applied as the depth information becomes
unreliable at close range and is not needed for guiding
the robot through the door.
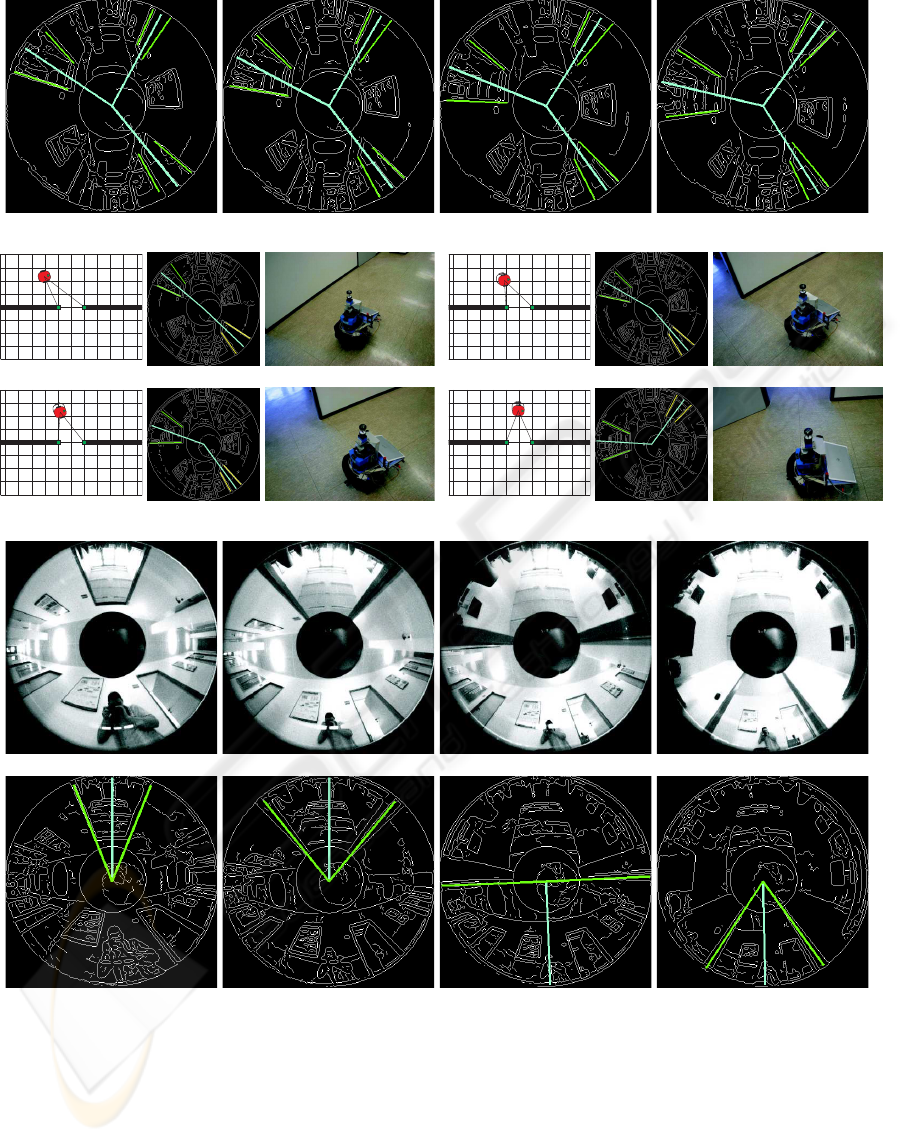
4 EXPERIMENTAL RESULTS
A typical scenario is depicted in Figure 5 consisting
of door detection (A), door localisation and tracking
(B) and door traversal (C). Similar traversal scenar-
ios with different doors, illumination and directions
of approach have been repeated successfully and con-
sistently about hundred times. The door detection al-
gorithm runs at a frame rate of 20 Hz on a standard
2.4 GHz processor and an image size of 388x388 pix-
els. False positives and false negatives in the door
detection mainly occur due to noise, occlusion, illu-
mination effects and confusion with door like objects
such as shelves. To render the detection algorithm
even more robust, the door frames are tracked over
consecutive images during the motion. Initial false
positives are eventually rejected in subsequent cap-
tures. This validation step is of particular importance
for the Kalman filter localization.
The algorithm is tested on 1000 manually labeled
images taken from video sequences capturedin the of-
fice environment of our department. The enviroment
is cluttered with objects such as pillars, cabinets or
frames that could be confused with doors. The data
set contains views taken from the corridor but also
from the inside of offices. We assume that our vision
based, topological localisation and navigation scheme
guides the robot to the vicinity of the door. Thus there
is need for our scheme to detect remote or occluded
doors.
The initial door detection is shown in row (A).
False positives in single images for doors amount to
3%, false negatives occur 5% of the time.
Row (B) of figure 5 depicts the state estimate and
measurements of the Kalman in terms of robot pose
relative to the door (left), the tracked door frames
in the omnidirectional view (center) and an external
view of the scene (right). During the tracking and ap-
proach phase the third door is occluded by a person
standing in front of the door. The robot proceeds from
its initial position about 1.5m along the corridor away
from the door (top left) until is longitudinally aligned
with the door center (bottom left) and completion of
the 90 ° turn (bottom right).
The door traversal stage is depicted in row (C)
starting initially heading towards the door (left), ap-
proaching the door (center left), passing the door
(center right) and after the traversal (right). Notice,
that at all times, the detected door posts form an equi-
lateral triangle with the image center indicating accu-
rate alignment of the robot with the door.
IMAGE SIGNAL PROCESSING FOR VISUAL DOOR PASSING WITH AN OMNIDIRECTIONAL CAMERA
477
A) Vision based door detection
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
m
m
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
m
m
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
m
m
−2.5 −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 2.5
−2
−1.5
−1
−0.5
0
0.5
1
1.5
2
m
m
B) Vision based door location and tracking
C) Visual servoing for door traversal
Figure 5: Experimental evaluation of the visual door passing behavior.
5 CONCLUSIONS
This paper introduced a novel framework for vision
based door traversal of a mobile robot. The door
detection, door tracking and door traversal rely on
omnidirectional images only. The door detection is
based on the matching of detected line segments with
prototypical door patterns. The door localisation and
tracking aggregates the visual measurements with the
robots odometry information in a Kalman filter. The
door traversal follows a 2D visual servoing approach
with extracted door posts as image features. The prac-
tical usefulness and robustness of the approach are
confirmed in several experiments in an office environ-
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
478

ment. The proposed scheme contributes to our overall
objective of achieving purely vision based robot navi-
gation and localisation in indoor environments. It has
been successfully integrated and tested with other vi-
sual behaviors such as goal point reaching and obsta-
cle avoidance.
REFERENCES
Baker, S. and Nayar, S. (1998). A Theory of Catadioptric
Image Formation. In IEEE Int. Conference on Com-
puter Vision (ICCV), pages 35–42.
Budenske, J. and Gini, M. (1994). Why is it so difficult
for a robot to pass through a doorway using ultrasonic
sensors? In IEEE Int. Conference on Robotics and
Automation, volume 4, pages 3124 – 3129.
Canny, J. (1986). A computational approach to edge de-
tection. IEEE Trans. Pattern Anal. Mach. Intell.,
8(6):679–698.
DeSouza, G. and Kak, A. (2002). Vision for mobile robot
navigation: A survey. IEEE Trans. on Pattern Analysis
and Machine Intelligence, 24(2):237–267.
Duda, R. O. and Hart, P. E. (1972). Use of the hough trans-
formation to detect lines and curves in pictures. Com-
mun. ACM, 15(1):11–15.
Eberst, C., Andersson, M., and Christensen, H. (2000).
Vision-based door-traversal for autonomous mobile
robots. In IEEE/RSJ International Conference on In-
telligent Robots and Systems,IROS 2000, volume 1,
pages 620 – 625.
Geyer, C. and Daniilidis, K. (2001). Catadioptric projective
geometry. Int. J. of Computer Vision, 4(3):223–243.
Jensfelt, P. (2001). Approaches to Mobile Robot Localiza-
tion in Indoor Environments. PhD thesis, KTH.
Kovesi, P. D. (2000). MATLAB and Octave functions
for computer vision and image processing. The
University of Western Australia. Available from:
<http://www.csse.uwa.edu.au/∼pk/research/matlabfns/>.
Monasterio, I., Lazkano, E., Rano, I., and Sierra, B. (2002).
Learning to traverse doors using visual information.
Trans. of Mathematics and Computers in Simulation,
vol.60.
Munoz-Salinas, R., Aguirre, E., M., G.-S., and Gonzlez,
A. (2004). Door-detection using computer vision
and fuzzy logic. WSEAS Transactions on Systems,
10(3):3047–3052.
Murillo, A. C., Kosecka, J., Guerrero, J. J., and Sagues, C.
(2008). Visual door detection integrating appearance
and shape cues. Robotics and Autonomous Systems,
56(6):512–521.
Patel, S., Jung, S. H., Ostrowski, J. P., Rao, R., and Tay-
lor, C. J. (2002). Sensor based door navigation for
a nonholonomic vehicle. In IEEE Int. Conference
on Robotics and Automation, Washington,DC, pages
3081–3086.
Shi, W. and Samarabandu, J. (2006). Investigating the per-
formance of corridor and door detection algorithms in
different environments. In Int.Conference on Informa-
tion and Automation, ICIA 2006, pages 206–211.
Stoeter, S., Le Mauff, F., and Papanikolopoulos, N. (2000).
Real-time door detection in cluttered environments.
In Proc. IEEE Int. Symposium on Intelligent Control,
pages 187 – 192.
Thrun, S., Burgard, W., and Fox, D. (2005). Probabilis-
tic Robotics (Intelligent Robotics and Autonomous
Agents). The MIT Press.
IMAGE SIGNAL PROCESSING FOR VISUAL DOOR PASSING WITH AN OMNIDIRECTIONAL CAMERA
479
