
HIERARCHICAL ONLINE IMAGE REPRESENTATION
BASED ON 3D CAMERA GEOMETRY
Sang Min Yoon and Holger Graf
GRIS, TU Darmstadt, Rundeturmstrasse 10, Darmstadt, Germany
ZGDV, Computer Graphics Center, Rundeturmstrasse 10, Darmstadt, Germany
Keywords:
Hierarchical image clustering.
Abstract:
Within this paper, we present a hierarchical online image representation method with 3D camera position
to efficiently summarize and classify the images on the web. The framework of our proposed hierarchical
online image representation methodology is composed of multiple layers: at the lowest layer in the hierarchi-
cal structure, relationship between multiple images is represented by their recovered 3D camera parameters
by automatic feature detection and matching. At the upper layers, images are classified using constrained
agglomerative hierarchical image clustering techniques, in which the feature space established at the lowest
layer consists of the camera’s 3D position. Constrained agglomerative hierarchical online image clustering
method is efficient to balance the hierarchical layers whether images in the cluster are many or not. Our
proposed hierarchical online image representation method can be used to classify online images within large
image repositories by their camera view position and orientation. It provides a convenient way to image brows-
ing, navigating and categorizing of the online images that have various view points, illumination, and partial
occlusion.
1 INTRODUCTION
As the use of digital cameras, cell phones, or PDAs
with embedded cameras is increasing, managing,
browsing, querying and summarizing photos from
personal image libraries or on the web is becoming
more critical. Online image retrieval and browsing
applications (Dent et al, 2001, Jhanwar et al, 2002,
Krishnamachari et al, 1999 , Qian et al, 2000) were
developed encouraging people to freely explore any
place in the world and discover interesting locations
and photographs.
In various web applications, geographical online map
services such as Google Earth or Virtual Earth have
become very popular with web-users. These applica-
tions allow the users to view and navigate their way
through high resolution satellite images from within
their home environment resp. their desk. It also offers
local information and photographs of specific places,
as well as the ability to view different geographic lev-
els of detail. If a specific place is very popular and
interesting, many photographs are uploaded and geo-
tagged (Jaffe et al, 2006) with this location by many
users.
Nevertheless, online images which are uploaded by
numerous users are so various that they have illumi-
nation variation, view changes, resolution, partial oc-
clusion, and noise. That is one of the bottlenecks
in extracting and matching features from online im-
ages. The locations of images uploaded by anony-
mous users to an online satellite map like Google
Earth are not exact and many photographs that con-
tain no tags or titles which represent their location, or
are incorrectly geo-tagged (Jaffe et al, 2006). To col-
lect the exact 3D position of the online images, we
need to recover the camera’s extrinsic parameters of
previously uploaded images. Without an appropriate
clustering of images, we are distracted in navigation
and view of the map.
Our objective of this paper is on how to select the
representative images of an interesting site and how
to summarize the online images hierarchically taking
into account the difference level of the map’s zoom
in/out. For this, the camera geometric information
based image classification is used. Retrieving the rep-
resentative images of a specific site with its camera’s
orientation and translation information needs robust
feature detection, matching, and image classification
(Brown et al, 2005).
Figure 1 shows the structure of our proposed approach
54
Min Yoon S. and Graf H. (2009).
HIERARCHICAL ONLINE IMAGE REPRESENTATION BASED ON 3D CAMERA GEOMETRY.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 54-59
DOI: 10.5220/0001790600540059
Copyright
c
SciTePress

(a) The concept of our proposed hierarchical online image representation method (b) Left 7 images are the repre-
sentative images in each layer of the category
Figure 1: The concept of our proposed hierarchial representation method of online images and some representative images in
the layers which are used in our experiments.
and representative images of each category and clus-
ter. This hierarchical structure is composed with mul-
tiple layers: the highest layer is called ”Category”,
middle layers are defined as ”Cluster”, and the lowest
level shows the relative 3D camera position of the im-
ages. Our representative images of each category and
cluster is the closest image through clustering opti-
mization and by hierarchical online image clustering.
Figure 1 also shows each images in the lowest layer
and upper layers which are constructed by online im-
age clustering from a collection of online images.
2 PREVIOUS RESEARCH
Research about geographic location based image re-
trieval (Naaman et al, 2004) or browsing increase dur-
ing the last few years. The organization of image col-
lections has been accomplished by several classifica-
tion criteria such as detecting significant events, geo-
graphical characteristics within a specific location, or
tags in titles of a photographs (Cai et la, 2004, Gao
et al, 2005, Jaffe et al, 2006). However, current re-
search efforts (Ahern et al, 2007) for image retrieval
based on common context and visual features within
online image repositories try to summarize the collec-
tion of images. Hierarchical online image represen-
tation tasks are composed of various technologies of
Image Based Modelling for extracting the 3D camera
geometry out of multiple images, feature classifica-
tion for online image clustering, and image similarity
measures (Simon et al, 2007, Snavely et al, 2006).
There are also similar approaches about online image
representation methods, interactive browsing and ex-
ploration of a collection of photographs and online
image summarization to represent visual content of a
given set (Wang et al, 2006).
Clustering is the unsupervised classification of pat-
terns into groups. Geographical tagging or title of
photographs have been used for online image retrieval
or browsing applications (Choubassi et al, 2007).
Nevertheless, the goal of feature classification and
clustering in image processing and computer vision
is how to deal with images for classification, in or-
der to separate the images by low-level features such
as color, texture, shape, or by high level semantics,
or a combination of those (Cai et al, 2004, Chen et
al, 1999, Deng et al, 2001, Gao et al, 2005, Jhanwar
et al, 2002, Rege et al, 2007). A similarity measure
using these features between online images is one of
the critical issues because it is still weak in partial oc-
clusion, view translation, orientation and noise (Fer-
gus et al, 2005). Most classification approaches into
three main categories; partition, Division, and Aggre-
gation (Cormark et al, 1971). One of the most popu-
lar methods in partition methodology is the k-Means
method (Bradley et al, 1998), the division follows
kd-tree method. When we compare to previous re-
search related to online image summarization (Simon
et al, 2007) and browsing, our proposed agglomera-
tive clustering has the advantage in showing the rep-
resentative images according to a geographical zoom
in/out. As we zoom out of the geographical hotspot,
we only show the representative images of the site or
building. Otherwise, we zoom in the map, we browse
the online images according to the 3D camera’s pa-
rameters. Another advantage of our proposed algo-
rithm is to provide an efficient hierarchical structure
of the online image data set.
3 HIERARCHICAL STRUCTURE
OF ONLINE IMAGES
In the following sections, we will explain how we ex-
tract the 3D extrinsic camera parameters from mul-
tiple images, establish relationship between 3D posi-
tions from multiple images and adequate classifica-
HIERARCHICAL ONLINE IMAGE REPRESENTATION BASED ON 3D CAMERA GEOMETRY
55

(a) Epipolar geometry and matching points with
automatic feature detection and matching (b)
Recovered 3D camera position with SIFT and
RANSAC
Figure 2: Recovering the 3D camera parameters in the
world coordinate system by automatic feature detection and
matching.
tion methods of images at the upper layers based on
the similarity measure derived from the camera’s 3D
extrinsic parameters.
3.1 Recovery of 3D Camera Parameter
Given N images in the database, the extrinsic cam-
era parameters of each image, E
i
(r, t), (i = 1, ..., n),
where r is 3x3 rotation matrix, and t is 1x3 transla-
tion vectors, are recovered by adequate feature detec-
tion mechanism in each camera, feature matching be-
tween multiple images, the calculation of the epipolar
geometry, and the 3D position estimation within the
world coordinate system (Hartley et al, 2004). Fig-
ure 2 highlights the process of recovering the E
i
(r, t)
from multiple images (Chaman et al, 1993). Figure 2-
(a) shows the example images within a collection of
online images. We have no prior knowledge such as
image resolution or tags or title (Jaffe et al, 2006). It
also shows matching features after the Scale Invariant
Feature Transform (SIFT) (Lowe, 2004) and Random
Sample Consensus (RANSAC). Figure 2-(b) displays
the relative 3D position and rotation of the camera
within the world coordinate system.
From the epipolar geometry and matching points, we
extracted the rotation and orientation of the cameras.
By calculating the epipolar geometry and extracting
the extrinsic camera parameters of multiple images,
we can sketch the relationship of the images. With
SIFT and RANSAC, the epipolar geometry and 3D
camera position of a set of online images is estimated
as shown in Figure 3. In this figure, the recovered
3D camera position within the world coordinate sys-
tem with the online images of Casa Mila, Barcelona,
Spain. The lowest layer of our hierarchical structure
is constructed using extrinsic camera parameters of
the images. In a next step, we describe the clustering
of images based on the distance of each 3D camera
position within the world coordinate system.
3.2 Online Image Clustering
In online image applications, unsupervised image
clustering can be separated with non-hierarchical and
hierarchical clustering algorithms (Krishnamachari et
al, 1999). In numerous non-hierarchical clustering
methods (Goldberger et al, 2006) which are exten-
sively used in data classification or data mining in
various areas, k-Means clustering is an algorithm to
cluster n images based on attributes into k partitions,
where k is less than n, to form a k-block set parti-
tion of data and to find good local minimum and have
linear complexity O(k
min
) with respect to the num-
ber of instances. However, the algorithm is sensitive
to initial starting conditions and hence must be ran-
domly repeated many times (Davidson et al, 2005).
Conversely, hierarchical clustering algorithms are run
once and create a dendrogram which is a tree struc-
ture containing a k-block set partition for each value
of k between 1 and n, where n is the number of online
images at the lowest level to cluster allowing the user
to choose a particular clustering granularity.
Let
S = {E
1
, E
2
, ..., E
n−1
, E
n
} (1)
be the set of 3D extrinsic parameters, E
i
, to be clus-
tered. At the initial status, the number of clusters is
same to the number of images, n, and each cluster C
i
is represented as E
i
for every i. Then we progressively
join the closest clusters through the equation shown in
equation-(2) untilk= 1.
s(i,j) = D(C
i
, C
j
), ∀i, j; l, m = argmin
a,b
d(a, b), (2)
C
l
= Join(C
l
, C
m
);Remove(C
m
) (3)
where s(i,j) is the similarity measure between clus-
ter C
i
and C
j
. In this paper, the similarity measure
between clusters are calculated by the Euclidean dis-
tance, D, of the camera’s 3D extrinsic parameters.
The objective of our hierarchical clustering algorithm
is to extract a multi-level partitioning of images based
on 3D camera parameters, i.e. a partitioning which
groups images into a set of clusters and then, recur-
sively, partitions them into smaller sub-clusters, until
some stop criteria are satisfied. Agglomerative hier-
archical clustering algorithms start with several clus-
ters containing only one object, and iteratively two
clusters are chosen and merged to form one larger
cluster. This process is repeated until only one large
cluster is left, that contains all objects. Divisive algo-
rithms work in the symmetrical way. Figure 4 shows
the original agglomerative hierarchical online image
clustering. A Similarity measure between multiple
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
56
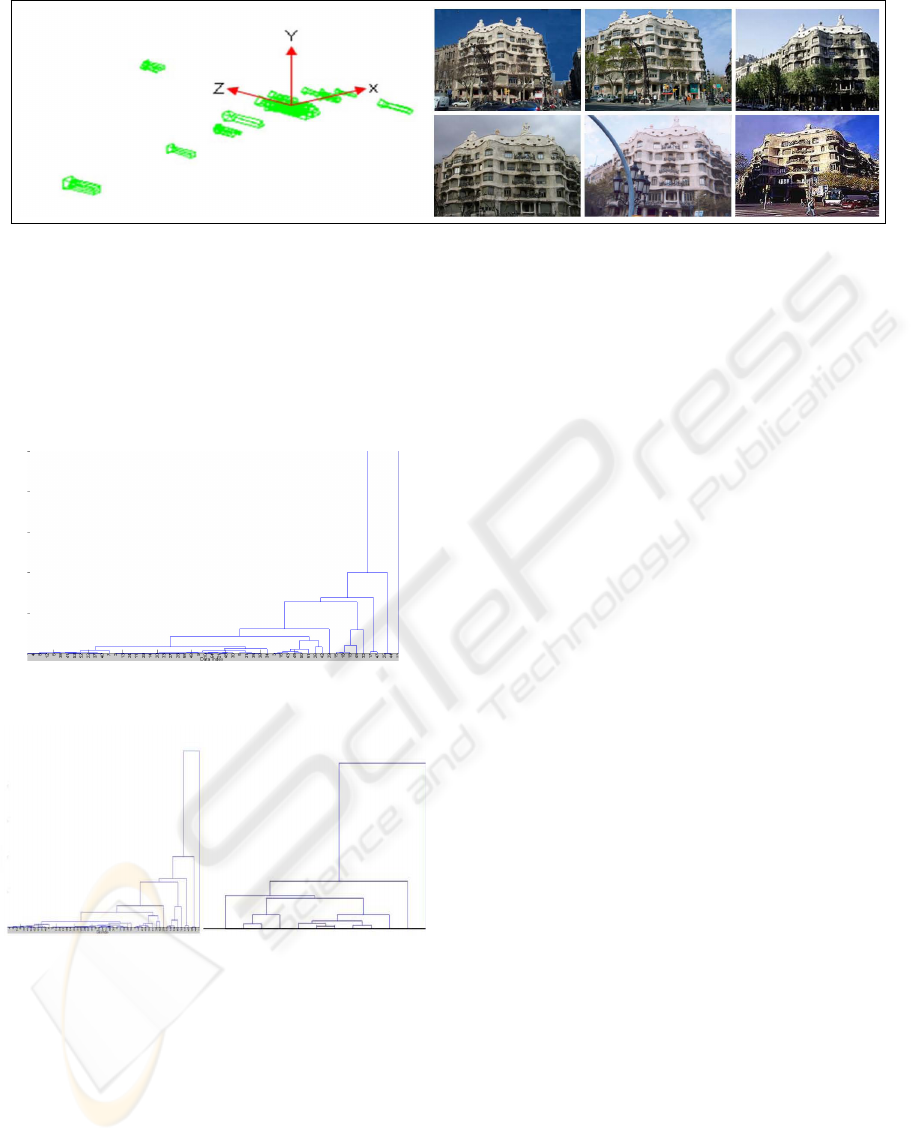
Figure 3: 3D Camera position and orientation of the multiple images which are extracted with SIFT and RANSAC within
category and some example images in the cluster.
images is computed by the Euclidean distance be-
tween 3D camera’s position. From multiple images
of the Casa Mila, layers are automatically clustered
into 12 layers. This number of layers is different from
site to site or change of view points.
Figure 4: Unconstrained agglomerative hierarchical online
image clustering with 3D extrinsic camera parameters.
Figure 5: Comparison of unconstrained and constrained ag-
glomerative hierarchical online image clustering methods
from recovered 3D camera parameters
The unconstrained version of agglomerative hierar-
chical online image clustering builds a dendrogram
for all values of k. If there are many online images
at a public site, the dendrogram will be high. How-
ever, there are many places that have only few up-
loaded online photographs in the internet. To bal-
ance the hierarchical layers of each sites, we impose
some constraints on the hierarchical clustering (Zho
et al, 2005). When building the Dendrogram, we
need the constraint of the numbers of dendrogram,
by W-constraint, and B-constraint algorithm. We can
prune the dendrogram by starting building clusters at
k
max
and stop building the tree after k
min
clusters are
reached. B-constraint is defined as the distance be-
tween any pair of images in two different clusters to
be at least B
min
, and W-constraint requires that for
each point x in C
i
, there must be another point y in C
i
such that the distance between x and y is at most W
max
(Davidson et al, 2005). At the initial of unconstrained
hierarchical clustering approach, the number of clus-
ters was equal to the number of images, n. However,
we construct an initial cluster by B-constraints and
W-constraints. This constrained agglomerative hier-
archical clustering algorithm procedure is shown be-
low:
k
max
, k
min
= calculateBound(W
max
, B
min
) (4)
s(C
i
, C
j
) ≥ B
min
∀i, j, s(x, y) ≥ W
max
∀x, y ∈ C
i
(5)
where eq-(5) is the distance bound for the distance be-
tween clusters and within cluster. Within this bound-
ary, we join the closed cluster until the dendrogram
is k
min
. Figure 5 shows the constrained agglomera-
tive hierarchical online image clustering method with
the constrained number of k, euclidean distance con-
straint based on the recovered 3D camera’s position.
4 EXPERIMENTS
We lead experiments with various online images
which are downloaded from internet. 90 images are
used for our experiments with multiple online images
of Casa Mila, Barcelona, on the web. Images in Casa
Mila are roughly separated with 3 categories and the
number of images in each category were 55 images,
21 images, and 14 images. We show the result of our
automatic hierarchical online image clustering from
the front and near view images. In the previous sec-
tion, we already represented the recovered camera’s
HIERARCHICAL ONLINE IMAGE REPRESENTATION BASED ON 3D CAMERA GEOMETRY
57
3D position and unconstrained and constrained online
image representation methodology.
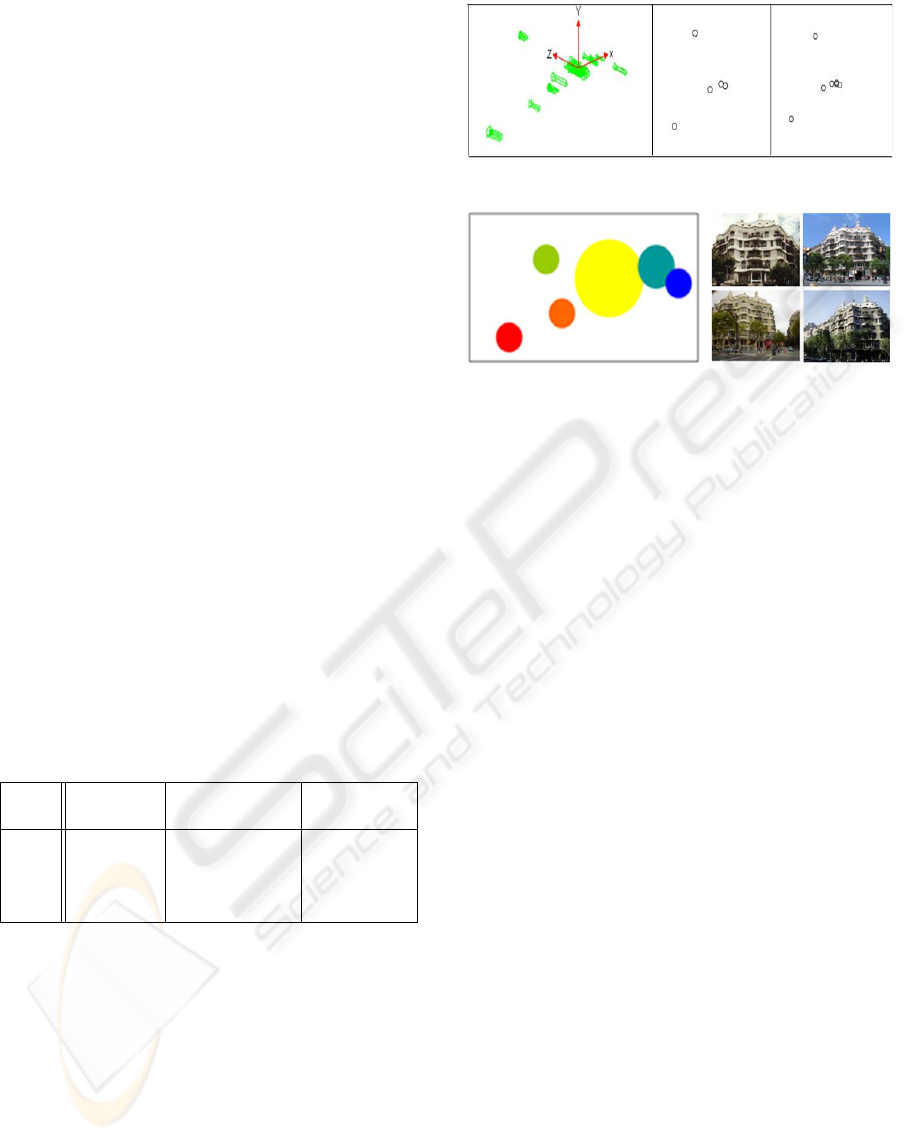
Our next experiment was comparison of the non-
hierarchical clustering algorithm such as k-Means (Si-
mon et al, 2007) and Mean-Shift clustering algo-
rithms [Comaniciu et al, 2002, Xu et al, 2005) to
check the efficiency in a hierarchical structure as
shown in Figure 6. Figure 67-(a) is the result of the
k-Means clustering when k is 5 and 7. Figure 6-(b)
shows the Mean-Shift cluster method, that automati-
cally separates 6 clusters. The representative image
in the cluster shown also in figure 6-(b) is the cen-
ter of gravity of the cluster. Constrained hierarchi-
cal online image clustering method is better than non-
hierarchical online image clustering in automatically
constructing a structure and balancing the hierarchy
of the areas that have many online photographs or not.
In the end of this paper, we also showed extracted 3D
camera position, unconstrained, and constrained hier-
archical online image clustering method in 28 images
of the Blue Mosque in Instanbul, Turkey in figure 7 .
Table 1 shows the number of hierarchical layers of
the category when we tested the unconstrained and
constrained hierarchical image clustering method. As
shown in table 1, we can see that the constrained hier-
archical image clustering method is efficient in bal-
ancing the hierarchical layers of the categories and
also useful in browsing the representative images of
the site.
Table 1: Comparison of the number of hierarchical layers
between unconstrained and constrained hierarchical cluster-
ing to show the balance of the hierarchical layers in various
sites.
Site Nr. of Unconstrained Constrained
Image Set Layer’s Nr. Layer’s Nr.
Site1 55 12 8
Site2 21 7 4
Site3 14 6 3
Site4 28 13 7
5 CONCLUSIONS AND FUTURE
WORKS
In this paper, we have presented the hierarchical on-
line image representation method for the efficient
browsing and navigation within a geographic online
map. We also presented a new approach in order to
estimate the relationship between a collection of on-
line images, how to select a representative image us-
ing the 3D camera position and orientation, and how
to construct a hierarchy of online images with a con-
strained agglomerative clustering methodology. The
(a) k-Means clustering of online images when k=5
and k=7
(b) Mean-Shift is separated with 6 clusters and its
size of the cluster is proportional to the number of
images in the cluster
Figure 6: Non-hierarchical online image clustering like k-
Means and Mean-Shift with camera’s 3D extrinsic parame-
ters
hierarchical tree which we presented in this paper can
be useful to many applications involving large collec-
tions of digital photographs. We are able to sort and
view the images that are geographically close to an
3D camera position that users want to watch. It gives
convenience and immersion related to applications in-
volving large data on web. Our future work improve
this system for industrial applications. The processing
time to estimate the 3D position of billion of images
is the critical problem in the works of online images.
We will focus on the advanced interaction with user
and our hierarchical structure is needed for immersive
navigation or viewing.
REFERENCES
Bradley, P., Fayyad, U., and Reina, C., 1998. Scaling Clus-
tering Algorithms to Large Databases. In Proceeding
of ACM 4th DKK Conference.
Brown, M., Lowe, D, G., 2005 Unsupervised 3D Ob-
ject Recognition and Reconstruction in Unordered
Datasets. 5th International Conference on 3D Imag-
ing and Modelling.
Cai, D., He, X., Li, Z., Ma, W. Y., and Wen, J. R., 2004 Hi-
erarchical Clustering of WWW Image Search Results
Using Visual Textual and Link Analysis. In Proceed-
ing of 12th ACM Multimedia
Chaman, L., and Sabharwal, 1993. Recovering 3D image
parameters from corresponding two 2 images. In Pro-
ceeding of SIGGRAPP Symposium on Applied Com-
puting.
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
58

Figure 7: (a) Some representative images in the hierarchical structure of online images and recovery of 3D camera’s extrinsic
parameters at Blue Mosque, Istanbul, Turkey (b)Unconstrained and constrained agglomerative hierarchical clustering method
Hierarchical online image representation method in Blue Mosque, Istanbul, Turkey.
Chen, Y., and Wong, E., 1999. Augmented Image His-
togram for Image and Video Similarity Search. In
Proceeding of SPIE Storage and Retrieval for Image
and Video Database.
Comaniciu, D., and Meer, P., 2002. Mean Shift: A robust
approach toward feature space analysis. IEEE Trans-
action on PAMI.
Cormark, R., 1971. A review of classification. Journal of
the Royal Statistical Society Series A 134.
Deng, Y., Manjunath, B. S., Kenney, C., Moore, M. S., and
Shin, H., 2001 An efficient color representation for
image retrieval. IEEE Transaction on Image Process-
ing.
Duda, R. D., Har, P. E., and Stork, D. G., 2001. Pattern
Classification. Wiley second edition
El Choubassi, M., Nefian, A. V., Kozintsev, I., Bouguet,
J.-Y, and YiWu., 2007. Web Image Clustering. In
Proceeding of IEEE ICASSP.
Fergus, R., Fei-Fei, L., Pernona, P., Zisserman,A., 2005.
Learning object categories from google’s image
search. In Proceeding of CVPR.
Gao,B., Lie, T., Qin, T., Zheng, X., Cheng, Q., and Ma, W.,
2005. Web image clustering by consistent utilization
of visual features and surrounding texts. In the Pro-
ceeding of ACM Multimedia.
Goldberger, J., Gordon, S., and Greenspan, H., 2006. Unsu-
pervised Image-Set Clustering Using an Information
Theoretic Framework. IEEE Transaction on Image
Processing.
Hartley, R., and Zisserman, A., 2004. Multiple View Ge-
ometry. Cambridge University Press.
Jaffe, A., Naaman,M., Tassa, T., and Davis, M., 2006. Gen-
erating summaries and visualization for large collec-
tion of geo-referenced photographs. In the proceed-
ing of ACM Workshop on Multimedia information Re-
trieval.
Jhanwar, N., Chaudhuri, S., Seetharaman, G., Zavidovique,
B., 2002. Content-based image retrieval using motif
cooccurence matrix. In Proceeding of Image Vision
Computing.
Krishnamachari, S., and Abdel-Mottaleb, M., 1999. Hierar-
chical Clustering Algorithm for fast Image Retrieval.
Naaman, M., Song, Y. J., Paepcke, A., and Garcia Molina,
H., 2004. Automatic organization for digital pho-
tographs with geographical coordinates. In the Pro-
ceeding of ACM/IEEE Joint Conference on Digital Li-
brary .
Lowe, D., 2004. Distinctive Image Features from Scale-
Invariant Keypoints. IJCV.
Rege, M., Dong, M., and Hua, J., 2007. Clustering web
image with multi-modal features. In Proceeding of
ACM Multimedia .
Qian, R., van Beek, L. P., and Ibrahim Sezan, M., 2000.
Image Retrieval Using Blob Histogram. In the Pro-
ceeding of ICME
Snavely, N., Seitz, S. M., and Syeliski, R., 2006. Photo
Tourism: Exploring collection in 3D. In the Proceed-
ing of SIGGRAPH.
Svoboda, T., Martinec, D., and Pajdla, T., 2005. A con-
venient multi-camera self-calibration for virtual envi-
ronments. PRESENCE: Teleoperators and Virtual En-
vironments.
Wang, J., Sun,J., Quan, L., Tang, X., and Shum, H. Y., 2006.
Picture Collage. In the Proceeding of CVPR.
Xu, D., Wang, Y. and An, J., 2005. Applying a New Spatial
Color Histogram in Mean Shift Based Tracking Algo-
rithm. In Proceeding of Image and Vision Computing.
Zeng, H. J., He, Q. C., Chen, Z., Ma, W. Y., and M, J. W.,
2004. Learing to cluster web search results. In Pro-
ceeding of 27th International ACM SIGIR Conference.
Zho, Y., and Karypis, G., 2005. Hierarchical Clustering
Algorithms for Document Datasets. In Proceeding of
Data Mining and Knowledge Discovery.
HIERARCHICAL ONLINE IMAGE REPRESENTATION BASED ON 3D CAMERA GEOMETRY
59
