
VARIATIONAL REGION GROWING
Rose Jean-Lo
¨
ıc, Revol-Muller Chantal, Odet Christophe
CREATIS-LRMN, CNRS UMR 5220, Inserm U 630, 69621 Villeurbanne, France
Reichert Christian
Institut Camille Jordan UMR 5208, 69621 Villeurbanne, France
Keywords:
Image segmentation, Region growing, Region-based criterion, Variational approach, Shape prior.
Abstract:
Region growing is one of the most popular image segmentation methods. The concept of region growing is
easily understandable but sometimes criticized for its lack of theorical background. In order to overcome this
weakness, we propose to describe region growing in a new framework which is the variational approach. A
variational approach is commonly used in image segmentation methods such as active contours or level sets,
but is quite original in the context of region growing. We call this method Variational Region Growing. First,
we define a region-based criterion. A discrete derivation is applied to this criterion in order to get an evolution
rule for the evolving region. The aim of this equation is to guide the evolving region towards a minimum of the
criterion. Then, we formalize the iterative process of region growing in the proposed framework. Furthermore,
we highlight the relevance of VRG for integrating shape prior. We apply VRG to synthetic and 3D-biomedical
images. Results illustrate the improvements of VRG compared to classical methods.
1 INTRODUCTION
Image segmentation is a fundamental topic in image
processing. The purpose of segmentation is to extract
regions of interest. Since its introduction by (Zucker,
1976), region growing has become a popular method
for 3D segmentation. In this approach, a homoge-
neous region is supposed to correspond to a semantic
object. Starting from a seed, manually or automati-
cally located, the iterative process of region growing
extracts a region of interest by merging all the neigh-
boring pixels. The merging of a pixel with the evolv-
ing region is governed by an aggregation criterion that
must be satisfied. At each step, a set of candidate
pixels neighboring the evolving region, or already be-
longing to it, are tested. Candidate pixels that meet
the aggregation criterion are added to the evolving re-
gion, thus resulting in a new region.
In classical region growing methods, aggregation
criterion can be categorized into two groups. In the
first group, the criterion governs the growth of a single
region. The criterion measures either a similarity be-
tween a candidate pixel and another pixel (Sekiguchi
et al., 1994) or the homogeneity of the resulting seg-
mented region (Revol-Muller et al., 2002). Such a
criterion requires the use of an arbitrary threshold to
fix the minimum value of homogeneity. This method
is attractive due to its simplicity, but the choice of
the threshold needs further knowledge about the grey-
level distribution to avoid trial and error adjustment.
In the second group, the criterion governs a compet-
itive growth of several regions. This kind of region
growing called seeded region growing was introduced
by (Adams and Bischof, 1994). At each iteration, the
pixel the most similar to a region is looked up in the
set of all candidate pixels and merged. This method
is thus free of tuning parameters.
Region growing method is appreciated for its sim-
plicity of use and its good segmentation results in var-
ious applications. The aggregation criterion usually
relies upon low level features of the image such as
grey levels of the pixels and the norm of intensity gra-
dient. However, region growing method presents sev-
eral drawbacks. First, region growing method lacks
theoretical framework, whether it be for the descrip-
tion of the iterative process or the definition of aggre-
gation criterion. Moreover, homogeneous regions are
not always related to meaningful objects. So, an ag-
gregation criterium only based on grey level measure-
ments is not sufficient to lead to an accurate segmen-
166
Jean-Loic R., Chantal R., Christophe O. and Reichert C. (2009).
VARIATIONAL REGION GROWING.
In Proceedings of the Fourth International Conference on Computer Vision Theory and Applications, pages 166-171
DOI: 10.5220/0001790001660171
Copyright
c
SciTePress

tation. Region growing can not thus distinguish con-
nected structures having similar intensities or statis-
tics. In order to face this problem, added information
must be taken into account during the growth such as
geometrical constraints or shape prior.
In this paper, we propose to formalize the iterative
process of region growing, and to set out a theoretical
framework for the definition of the aggregation crite-
rion. Our work is based on variational approach, so
it was called Variational Region Growing(VRG). The
main idea is to minimize a region-based energy by
means of a discrete derivation. The major relevance
of this framework is its ability to define various ag-
gregation criteria. In (Rose et al., 2007), a new aggre-
gation criterion integrating shape prior was presented.
The shape prior was given by a binary volumic model
of the target object. Here, we are going to incorpo-
rate that criterion into the variational region growing
framework. This implies to define a new energy ac-
cording to the former aggregation criterion. Then,
this energy is minimized in order to get the evolution
rule of the region growing. The tests were applied to
synthetic and 3D-biomedical images. Qualitative and
quantitative results show the ability of variational re-
gion growing to achieve good segmentation even in
case of highly corrupted images, without depending
on the pose parameters of the reference model.
2 VARIATIONAL REGION
GROWING
Region growing can be described as an iterative pro-
cess making a region evolve. The originality of VRG
is to recover an object of interest by means of a dis-
crete function that switches according to the mini-
mization of an energy also called criterion. This cri-
terion is designed so that its minimum corresponds to
the sought solution. In the literature, many region-
based energies were introduced into the variational
framework. The purpose of VRG is to make a region
evolve towards a meaningful partition of the image,
using the minimization of such a region-based crite-
rion.
2.1 Discrete Region Function
In our region growing formalism, the evolving region
at the iteration n is represented by a discrete binary
function φ
x
given by :
φ
n
x
= 0, for x ∈ Ω
in
φ
n
x
= 1, for x ∈ Ω
out
(1)
with Ω the image domain in R
d
. Ω
in
is a region in Ω.
Ω
out
is defined as Ω
out
= Ω\Ω
in
and x an element of
Ω.
2.2 Discrete Derivation of the
Region-based Criterion
In this section, we study the discrete derivation of a
region-based energy in order to get an aggregation
rule. This rule will be applied to candidate pixels
and will drive the evolving region near the solution.
Of many proposed region-based criteria, a general
region-based energy J (Ω
in
) was defined by (Jehan-
Besson, 2003) as:
J (Ω
in
) =
Z
Ω
in
k (x, Ω
in
)dx (2)
where k is the region descriptor of Ω
in
. For an iter-
ative process, it is assumed that J
Ω
n+1
in
the energy
of the evolving region at iteration n+1 is the sum of
J (Ω
n
in
) the energy of the region at previous iteration
and ∆J
Ω
n+1
in
the variation of energy due to aggre-
gation of one pixel. This is expressed in the following
equation:
J
Ω
n+1
in
= J (Ω
n
in
) + ∆J
Ω
n+1
in
(3)
Our objective is to determine the variation of energy
∆J
Ω
in
n+1
, also called evolution equation of the re-
gion. We distinguish two cases whether the region
descriptor depends or not on the evolving region. For
both cases, we propose a discrete expression of the
energy criterion, and we describe how to get the evo-
lution equation of the region. This equation will help
the region evolve towards a minimum of energy. De-
pending on the sign of ∆J
Ω
in
n+1
value, the consid-
ered pixel will be agregated or rejected.
2.2.1 Region-independent Energy Derivation
(Jehan-Besson, 2003) gives a general definition of
a region-based energy computed from a “region-
independent“ descriptor:
J (Ω
in
) =
Z
Ω
in
k (x)dx (4)
Since in region growing methods, the evolving re-
gion is represented by a set of pixels, we decide to
translate the previous definition into a discrete expres-
sion. We thus propose a new discrete energy com-
puted from φ
n
previously defined in (1):
J (φ
n
) =
∑
x∈Ω
k
x
· φ
n
x
(5)
VARIATIONAL REGION GROWING
167

Starting from this energy, we determine the varia-
tion of J (φ
n
) induced by the state switch of a candi-
date pixel. We define the state switch of a pixel v by
the following equation:
φ
n+1
v
= 1 − φ
n
v
, (6)
thus,
φ
n+1
x
= φ
n
x
i f x 6= v. (7)
Like equation (5), the energy at iteration n + 1 can be
expressed as a function of φ
n+1
:
J
φ
n+1
=
∑
x
k
x
· φ
n+1
x
(8)
Using equations (6) and (7), we can also write:
J
φ
n+1
= k
v
· φ
n+1
v
+
∑
x6=v
k
x
· φ
n
x
(9)
J
φ
n+1
= k
v
· (1 − φ
n
v
) − k
v
· φ
n
v
+ k
v
· φ
n
v
+
∑
x6=v
k
x
· φ
n
x
| {z }
J(φ
n
)
(10)
∆J
φ
n+1
is obtained by identification of equations
(10) and (3):
∆J
φ
n+1
v
= (1 − 2φ
n
v
) · k
v
(11)
Note that this variation of energy is defined whatever
the region-independent descriptor used.
2.2.2 Region-dependent Energy Derivation
This section deals with the minimization of a discrete
region-based energy when the descriptor is “region-
dependent“. We propose the following general ex-
pression for the energy:
J (φ
n
) =
∑
x∈Ω
k
x
(φ
n
x
) · φ
n
x
(12)
where k
x
(φ
n
x
) = k (x, φ
n
x
) is a region-dependent de-
scriptor. Such a descriptor changes as the segmen-
tation progresses, so we need to define the variation
of the descriptor between two iterations:
k
x
φ
n+1
x
= k
x
(φ
n
x
) + ∆k
x
φ
n+1
x
(13)
Moreover,
J
φ
n+1
=
∑
x
k
x
φ
n+1
x
· φ
n+1
x
(14)
The energy variation ∆J
φ
n+1
v
is obtained as in the
above subsection.
∆J
φ
n+1
v
= (1 − 2 · φ
n
v
) · k
v
+ ∆K
x
(15)
with,
∆K
x
= (1 − φ
n
v
) · ∆k
v
φ
n+1
v
+
∑
x6=v
∆k
x
φ
n+1
x
· φ
n
x
(16)
This last term ∆K
x
coming from the descriptor varia-
tion is most often negligible.
2.3 Implementation Issues
In this section, we focus on the VRG algorithm imple-
mentation. In a first step, we describe how to choose
the set of candidate pixels required by VRG algo-
rithm. Then, we detail the rules of aggregation ap-
plied to these pixels. These rules depend on the state
of the pixel and the sign of the energy variation. To
sum up, we give a synoptic view of the VRG algo-
rithm .
2.3.1 Candidate Pixels
The candidate pixels are the set of pixels tested at each
iteration by the predicate of aggregation. This set is
noted C
n
, and depends on the segmented region Ω
in
.
The pixels of C
n
can either be non segmented ones
i.e. belonging to Ω
out
or already segmented ones i.e.
belonging to Ω
in
, but in all cases in the vicinity of the
contour of Ω
in
.
We define C
n
as:
C
n
(Ω
in
, ε) =
{
m ∈ Ω
out
, n ∈ Ω
in
|d (m, n) ≤ ε
}
(17)
where ε > 0 is the maximum Euclidean distance be-
tween two pixels at each side of the contour of Ω
in
.
2.3.2 Variational Region Growing algorithm
In section 2.2, we studied the derivation of the region-
based criterion leading to the evolution equation. This
section considers the state switch of a candidate pixel
according to the variation of energy given in equa-
tion (11). The main difference between our approach
and other region growing methods lies in the strat-
egy of the aggregation. In VRG, our iterative process
tries to achieve a minimization of energy, whereas the
other methods merge pixels while the homogeneity
criterion is satisfied. This subsection provides the ag-
gregation rules that ensure VRG to reduce the energy
criterion at each iteration and converge to a minimum.
At iteration n, a pixel v undergoes a state switch
if it leads to a lower energy. Table 1 displays a sum-
mary of the possible state switches according to the
variation ∆J
φ
n+1
v
and the initial state of v :
The aggregation criterion ∆J
φ
n+1
v
governs the
state switch of v. If ∆J
φ
n+1
v
< 0, then v is added to
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
168
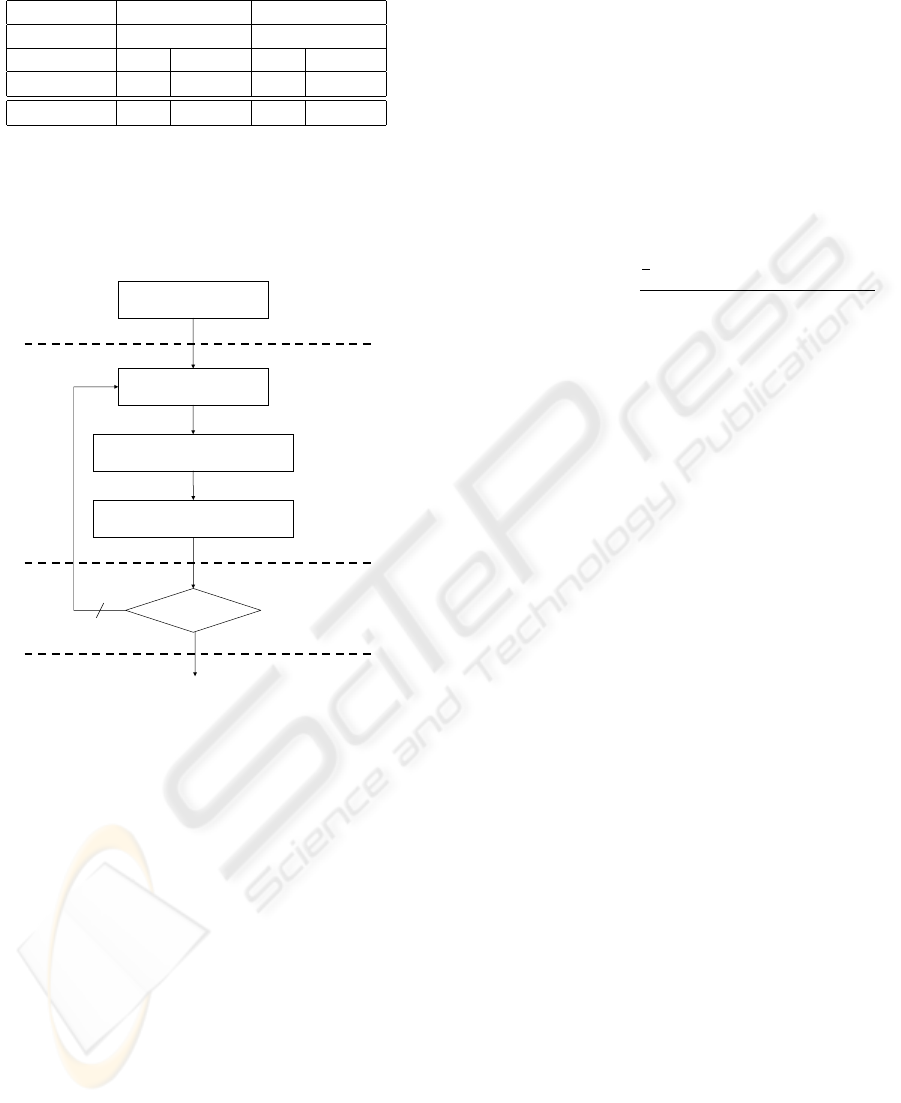
Table 1: State switch rules.
φ
n
v
Initial state: 0 Initial state: 1
(1 − 2 · φ
n
v
) -1 +1
k
v
< 0 > 0 < 0 > 0
∆J
φ
n+1
v
> 0 < 0 < 0 > 0
φ
n+1
v
0 1 0 1
(φ
n+1
v
= 1) or rejected from the evolving region (φ
n+1
v
= 0).
Figure 1 sums up the different steps of VRG algo-
rithm.
0
φ
Initialization
Deformation
Convergence
Segmented region
Update of candidate
pixels .
State switch for each pixel .
if .
. ?
f
φ
Initial seeds
Compute energy variation .
for each pixel .
n=n+1
n
C
0
n
=
(
)
1
n
J
φ
+
∆
v
n
C
∈v
(
)
1
0
n
J
φ
+
∆ <
v
n
C
∈v
1
n n
φ φ
+
=
Figure 1: Variational Region Growing algorithm.
We have laid out a general framework that may fit
many segmentation applications by only changing the
region descriptors. In the following sections, we give
guidance on how to integrate different energy criteria
in VRG. We will see, in particular, that it is quite easy
to integrate shape prior in VRG or to combine several
energy criteria.
3 INTEGRATION OF SHAPE
PRIOR IN VRG
The purpose of this section is to show the ability of
VRG to take into account shape prior. We start from a
previous work (Rose et al., 2007) which was focused
on the integration of shape prior in a 3D region grow-
ing and we propose to improve this work by trans-
lating the former shape prior criterion into a region-
based energy.
3.1 Shape Prior-based Criterion
Let us recall some definitions given in (Rose et al.,
2007):
d
x, Γ
re f
is the normalized signed distance from
x to the nearest pixel belonging to the reference con-
tour, negative inside the reference object, positive out-
side.
ϕ
shape
d
x, Γ
re f
∈ [0, 1] is a function encoding
shape prior which takes a value close to 1 (resp. 0)
when x is inside (resp. outside) the reference object:
ϕ
shape
d
x, Γ
re f
=
π
2
− tan
−1
λ · d
x, Γ
re f
3
π
(18)
where λ is a tuning parameter.
We rescale ϕ
shape
d
x, Γ
re f
to the range
[−1, 1], thus defining ϕ
new
d
x, Γ
re f
:
ϕ
new
d
x, Γ
re f
= 2×ϕ
shape
d
x, Γ
re f
−1 (19)
The new shape prior-based criterion J
P
is defined,
so that it supports (resp. penalizes) agreggation of
pixels when they are inside (resp. outside) the object
of reference :
J
P
(Ω
in
) =
∑
x∈Ω
in
−ϕ
new
d
x, Γ
re f
(20)
Note that ϕ
new
d
x, Γ
re f
depends on the affine
position of the reference object. This problem is eas-
ily settled by using a classical affine transformation
x
0
= T
a f f
· x.
Then, we express the criterion J
P
as a function of
φ
n
:
J
P
(φ
n
) =
∑
x
−ϕ
new
d
x
0
, Γ
re f
· φ
n
x
(21)
The shape prior-based criterion J
P
penalizes large
discrepancies between the evolving region and the
reference model.
3.2 Derivation of the Shape Prior-based
Criterion
We derive the shape prior-based criterion according to
our variational approach. By definition, the descriptor
in equation (21) is region-independent. Consequently,
the variation of the criterion for a pixel v is directly
determined from equation (11):
∆J
φ
n+1
v
= (1 − 2φ
n
v
) ·
−ϕ
new
d
v
0
, Γ
re f
(22)
VARIATIONAL REGION GROWING
169
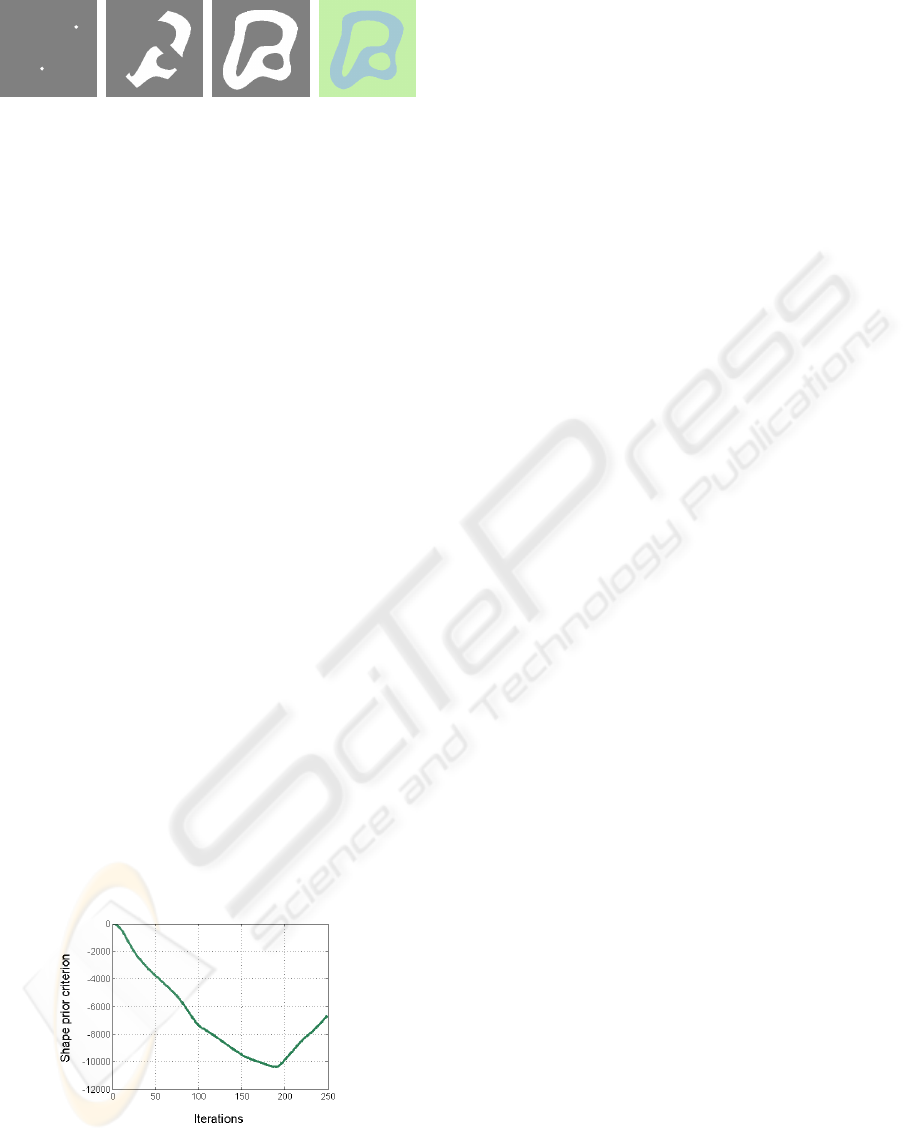
(a) n=1 (b) n=80 (c) n=189 (d)
Figure 2: Region evolution using only shape prior constrain
(λ = 15): (a) original image with two initial seeds , (b) in-
termediate step, (c) final result, and (d) reference shape
3.3 Experimental Result
We propose to illustrate and quantify the ability of the
shape prior criterion defined in equation (21) to make
the evolving region converge towards the shape refer-
ence, while enabling free changes of topology during
the growing.
In Figure 2, VRG is tested by only using the
shape prior-based criterion computed from the refer-
ence model given in Figure 2(d), i.e. without taking
into account any grey level information. Figure 2(a)
depicts the original constant image with two initial
seeds. Figure 2(b) displays the VRG segmentation
in progress with two disconnected components. Fig-
ure 2(c) shows the resulting segmented object with
only one connected component. This test highlights
two major properties of VRG: (i) how the shape prior-
based criterion forces the evolving region to look like
the reference model and (ii) how VRG allows free
changes of topology during the segmentation.
Figure 3 displays the evolution of the shape prior-
based criterion during the above described segmenta-
tion of VRG. The decrease of the energy clearly ap-
pears during the progression of the segmentation. At
iteration n = 189, the minimum of the shape prior-
based criterion is reached, VRG has converged to-
wards the sought object. After this iteration, random
pixels were added to the segmented region, thus lead-
ing to an increasement of the criterion.
Figure 3: Shape prior criterion minimization is obtained for
the iteration n = 189.
4 APPLICATION TO
BIOMEDICAL IMAGE
SEGMENTATION
Biomedical images are often difficult to segment due
to artifacts and low signal to noise ratio. Most of
region growing methods only based on homogeneity
criterion fail to recover object of interest. The purpose
of this section is to show that VRG provides a general
framework which can be adapted to the needs of the
targeted application. We do not present an extensive
experiment validating the accuracy of our segmenta-
tion, we just want to exemplify a possible use of VRG.
VRG can answer the problem raised before if its en-
ergy criterion integrates both grey level information
and shape prior.
So, we propose a new region-based criterion for
VRG, that mixes image data information and shape
prior. This new criterion expressed in equation (24)
is the sum of the shape prior-based criterion defined
in (21) and the well-known image data criterion intro-
duced by (Chan and Vese, 2001) as:
J
I
(φ
x
) =
∑
x
|
I
x
− µ
in
|
2
· φ
x
+
∑
x
|
I
x
− µ
out
|
2
· (1 − φ
x
)
(23)
where µ
in
(resp. µ
out
) is the average intensity in the
domain Ω
in
(resp. Ω
out
). I
x
is the intensity value of
the pixel x.
J
T
(φ
x
) = J
I
(φ
x
) + α ∗ J
P
(φ
x
) (24)
where α is an arbitrary hyper-parameter required to
balance the influence of shape prior and image data
criteria.
By minimizing J
T
(φ
x
), we obtain:
∆J
φ
n+1
v
= (1 − 2φ
n
v
)·
|
I
v
− µ
in
|
2
+
|
I
v
− µ
out
|
2
− α · ϕ
d
v
0
, Γ
re f
(25)
where µ
in
and µ
out
are updated at each iteration.
VRG was applied to three dimensional micro-CT
scans of mice kidney. The framework of the appli-
cation is the phenotyping of mice kidneys. The 3D
reference model was obtained by a previous segmen-
tation of a reference image. The method was tested on
a random input volume. Slices of x-plane and y-plane
are shown in Figures 4(a), and 4(d) .
We compare the results of VRG with and without
shape prior i.e using J
T
(φ
x
) or only J
I
(φ
x
) the clas-
sical region-based energy defined in equation (23).
Figure 4(b) and 4(e) show the resulting segmentation
without shape prior. The segmentation fails to seg-
ment the kidney due to strong inhomogeneities in the
VISAPP 2009 - International Conference on Computer Vision Theory and Applications
170

image. Moreover, the segmentation spreads through
the leaking points induced by an artifact. Figure 4(c)
and 4(f) illustrate VRG results with shape prior con-
strain. The parameter λ steping in J
P
(φ
x
) was set to
15 . This value was not chosen too high in order to
let flexibility with regard to the reference model (for
further details, see (Rose et al., 2007)). The hyper-
parametre α was fixed to 1000 and achieves a good
compromise between J
P
(φ
x
) and J
I
(φ
x
) since the kid-
ney surface was recovered more accurately and with-
out any leakage.
5 CONCLUSIONS
This work presents a new region growing approach.
We define a discrete function which evolves accord-
ing to the minimization of an energy functional in-
cluding region-based terms. Our approach is based on
a discrete derivation and allows to readily take into ac-
count both region-dependent and region-independent
descriptors. An evolution equation is determined and
enables to govern the state switch of the candidate
pixels during the progression of the segmentation.
In order to demonstrate the interest of Variational
Region Growing, we have integrated shape prior into
the region-based criterion governing the algorithm.
The shape prior-based criterion enables to constrain
the shape of the evolving region. Our tests have
pointed out the convergence of the criterion towards a
minimum during the segmentation and also the ability
of the criterion to constrain the segmentation.
Our method was tested and applied to small ani-
mal imaging in order to highlight the performance of
shape prior constrain. The results show the improve-
ment provided by VRG when its region-based crite-
rion takes into account both image data information
and shape prior.
ACKNOWLEDGEMENTS
This work was funded by the EUMORPHIA project
(QLG2-CT-2002-00930) supported by the European
Commission under FP5. It is in the scope of the sci-
entific topics of the PRC-GdR ISIS research group of
National Center for Scientific Research CNRS.
REFERENCES
Adams, R. and Bischof, L. (1994). Seeded region growing.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, 16(6):641–647.
(a) Initial image (b) α = 0 (c) α = 1000
(d) Initial image (e) α = 0 (f) α = 1000
Figure 4: 3D µ-CT image segmentation: (a,d) slices of the
input volume, (b,e) segmentation result without shape prior,
(c,f) segmentation result using our shape prior constrain.
Chan, T. and Vese, L. (2001). Active contours without
edges. Image Processing, IEEE Transactions on,
10(2):266–277.
Jehan-Besson, S. (2003). Mod
`
eles de contours actifs
bas
´
es r
´
egion pour la segmentation d’images et de
vid
´
eos. PhD thesis, Universit de Nice-Sophia Antipo-
lis, France.
Revol-Muller, C., Peyrin, F., Carrillon, Y., and Odet, C.
(2002). Automated 3d region growing algorithm
based on an assessment function. Pattern Recognition
Letters, 23(1-3):137–150.
Rose, J.-L., Revol-Muller, C., Almajdub, M., Chereul, E.,
and Odet, C. (2007). Shape prior integrated in an au-
tomated 3d region growing method. In IEEE ICIP,
volume 1, pages I – 53–I – 56.
Sekiguchi, H., Sano, K., and Yokoyama, T. (1994). Inter-
active 3-dimensional segmentation method based on
region growing method. Systems and Computers in
Japan, 25(1):88–97.
Zucker, S. W. (1976). Region growing: Childhood and ado-
lescence. Computer Graphics and Image Processing,
5(3):382–399.
VARIATIONAL REGION GROWING
171
