
AN EFFICIENT AND EFFECTIVE IMAGE SEGMENTATION
INTERACTIVE TOOL
Dorit S. Hochbaum
UC Berkeley Ca 94720, U.S.A.
Keywords:
Array-CGH, Comparative Genomics, Arabidopsis Ecotypes, Hidden Markov Model(HMM).
Abstract:
This paper describes a utilization of a very efficient polynomial time algorithm, discovered by Hochbaum
(2001), for segmentation tool through Markov Random Fields. The tool allows flexible choice of input param-
eters, controlling the output within an interactive tool with dynamic features and easily modified parameters.
1 INTRODUCTION
Image segmentation is one of the most fundamental
and challenging problems in computer vision with ap-
plications, such as pattern recognition, object detec-
tion, and medical imaging. The procedures engaged
for solving many of the segmentation problems with
large size data sets, apply heuristics and approxima-
tions techniques, which use approaches such as aggre-
gation, preprocessing with clustering, sampling, spec-
tral analysis or decomposition. These methods are
limited by the quality of the heuristics and are compu-
tationally too expensive to be used in many practical
images and certainly not in interactive settings.
In many image segmentation problems, a human
user can easily see the segments, patterns and fea-
tures. This human ability has occasionally been re-
cruited to aid segmentation. Here we are concerned
with images where a human user cannot differentiate
important and salient features. Instead, the segmen-
tation algorithm is used to bring forth these features
and very efficiently.
This paper presents an efficient segmentation
method and its interactive use in order to detect fea-
tures that are not visible to a human user in the noisy
input image. As such it is capable of identifying tu-
mors and other pathologies in noisy medical images,
or in images where an adversary is hiding certain ob-
jects. The tool presented is tested on brain images
(Collins et al., 1998). We show that lesions that are
difficult to detect in the input image can be identified
with the use of the methodology proposed here.
2 THE METHODOLOGY
A noisy or corrupted image is characterized by lack-
ing uniform color areas, which are assumed to charac-
terize a true image. To achieve higher degree of uni-
form color areas, it is reasonable to assign a penalty
to neighboringpixels that have differentcolors associ-
ated with them. On the other hand, the purpose of the
segmentation is to represent the “true” image. For that
purpose the given assignment of colors in the input
image is considered to be the “priors” on the colors of
the pixels, and as such, the best estimate available on
their true labels. Therefore, any change in those pri-
ors is assigned a penalty for deviating from the priors.
The Markov Random Fields optimization prob-
lem for the image segmentation problem is to assign
colors to each pixel so that the total penalty is min-
imized. The penalty consists of two terms. One is
the separation penalty term and the second is the de-
viation penalty term. For this reason we refer to this
penalty minimization problem also as the separation-
deviation problem (SD). This problem has been ex-
tensively studied over the past two decades, see e.g.
(Geiger and Girosi, 1991; Geman and Geman, 1984).
In the formulation of the MRF problem the input im-
age has each pixel in the pixel set P associated with
a color in a given set X = {1, . . . , k}. The neighbor-
hood of pixel i, which contains pixels adjacent to i, is
denoted by N(i). We wish to assign each pixel i ∈ P
an intensity x
i
∈ X so that the sum over all pixels of
the deviation cost G
i
(·) and the separation cost F
ij
(·)
is minimized:
(SD) minD
∑
j∈V
G
j
(r
j
− x
j
) + S
∑
(i, j)∈N(i)
F
ij
(x
i
− x
j
),
subject to x
i
∈ X for i ∈ V ,
459
Hochbaum D. (2009).
AN EFFICIENT AND EFFECTIVE IMAGE SEGMENTATION INTERACTIVE TOOL.
In Proceedings of the International Conference on Bio-inspired Systems and Signal Processing, pages 459-461
DOI: 10.5220/0001379304590461
Copyright
c
SciTePress
where the deviation function depends on the devia-
tion of the assigned color from the given intensity, r
i
and the separation is a function of the difference in as-
signed intensities between adjacent pixels (x
i
and x
j
).
D and S are constant integers multiplying the devia-
tion and separation terms respectively. If S = 0 then
the output is the same as the input, if the colors of
the input are in X, otherwise each pixel is assigned a
”nearest” color label in X. If D = 0 then the output is
a single color label assigned to all nodes. The values
of S and D, if positive, are not important. Only the
ratio of
S
D
is important in determining the degree of
color uniformity in the image. The larger this ratio,
the greater the color uniformity.
The complexity of the separation-deviation prob-
lem depends on the form of the penalty functions. A
full classification of the problem’s complexity is given
in (Hochbaum, 2001) showing that for convex penalty
functions the problem is polynomially solvable, and
for non-convex the problem is NP-hard. The cases
when the deviation penalty functions are convex and
the separation penalty functionsare linear, for positive
and negative deviations (e.g. F
ij
(x
i
− x
j
) = |x
i
− x
j
|),
was shown by Hochbaum (Hochbaum, 2001) to be
solvable using an algorithm which is the fastest pos-
sible. For the type of problems we are interested in
the choice of linear separation functions gives better
results than convex quadratic ones.
3 THE INTERACTIVE TOOL
AND SOME RESULTS
The empirical implementation of the separation-
deviation algorithm is using a parametric minimum
s, t-cut algorithm code. Our code is based on the
pseudoflow algorithm of (Hochbaum, 2008) for max-
imum flow and minimum cut. The code is accessi-
ble for download at (Chandran and Hochbaum, 2007).
Figure 1 shows the synthetic noisy image, which was
used as the input in this illustration and its corre-
sponding true brain image, (Collins et al., 1998).
Noisy Image
True Image
Figure 1: Brain image, Noisy and True.
The current algorithm’s interface tool supports the
following interactive functions:
Segment Image with a Fixed Number of Automat-
ically Selected Colors. For a selected number of
colors the tool uses a k-means algorithm to select the
colors. The number of colors is not necessarily equal
to the number of segments as each color set is not re-
stricted to be a connected component.
Segment for a Specific Selected Color Set X. The
user can add or remove colors from an existing color
set by clicking on any pixel in the image, or manually
insert the color code. As derived from the theory (out-
lined in an expanded version of this paper), the output
image can be generated by reading the existing output
and without additional computation.
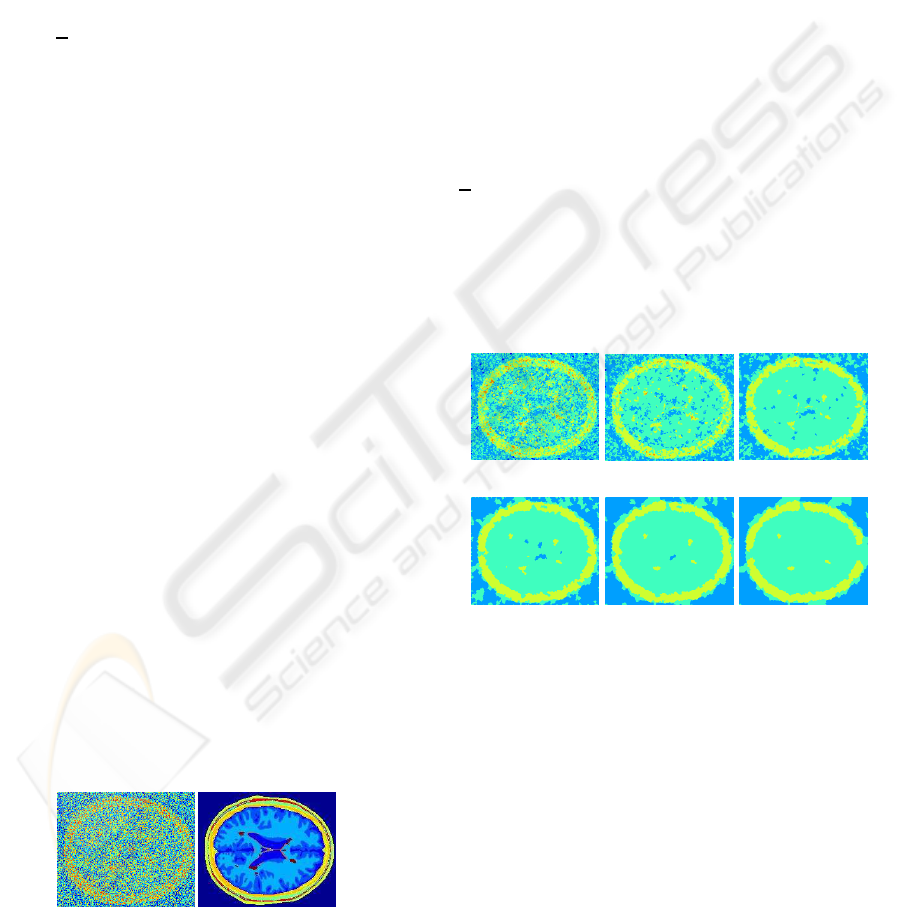
Uniform Increase/Decrease in Deviation and Sep-
aration Costs. The tools allows to modify the ratio
S
D
. The effect of modifying this ratio is illustrated in
Figure 2 for the brain images, shown in Figure 1. In
that image here are four small lesions. We then apply
the separation-deviation algorithm with D = 2 and for
increasing values of S. The lesions show very clearly
in the high separation images.
S = 30
S = 40
S = 50
S = 60
S = 70
S = 80
Figure 2: The output for increasing values of S when ap-
plied to noisy brain image.
Color Restricted Change in Deviation. When the
user suspects that a certain color area may indicate an
object of interest, it is possible to increase the devi-
ation functions associated with this color only. So
for selected color g the deviation function G
i
(x
i
, g)
is increased by the selected factor for all pixels with
input color g. This guarantees that any pixel with
input color equal to g is more likely to show in
the segmented output, even though it is small and
has unusual boundaries that otherwise would have
been “cleaned” by the separation penalty dominance.
When selecting, for example, in the brain image in
Figure 1, the color orange, it appears as the color of 3
out of the 4 lesions, as can be seen in Figure 3. When
the deviation for that color is increased the lesions
BIOSIGNALS 2009 - International Conference on Bio-inspired Systems and Signal Processing
460
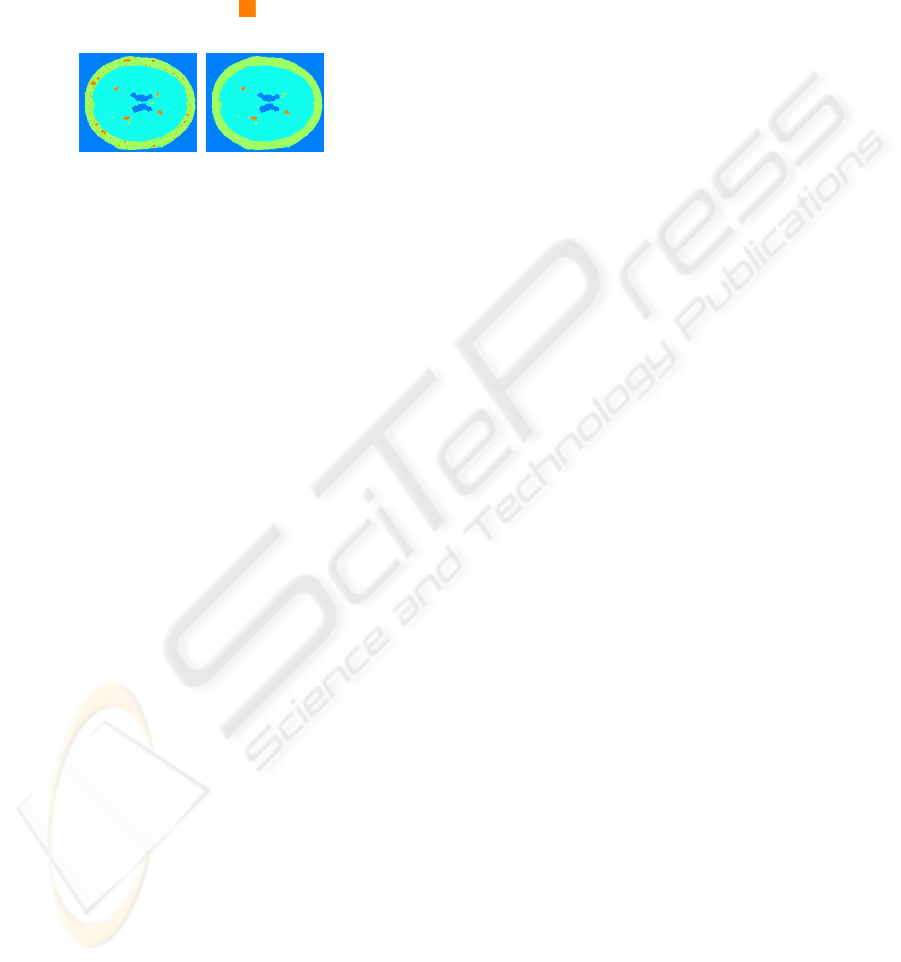
become better segmented and more prominent. Of
course, the color orange also appears in other areas of
the brain shell where it is of no clinical significance.
This issue will be addressed in the next prototype of
the interactive tool, where the deviation increase will
apply only in a user-defined window.
Effect of increasing Deviation penalty for selected
color (orange )
k = 5, D = 2, S = 70
Figure 3: Increased deviation penalty for a selected color in
brain image.
Choose Neighborhood Adjacency. Neighborhood
is commonly referred to 8-or a 4-neighbor adjacency.
The algorithm is independent of planarity or any other
graph properties. The neighborhood thus is not re-
stricted to the 4-neighbor setup that is the most com-
mon in other image segmentation algorithms. Any
other type of neighborhood can be used, but an inter-
face creating the corresponding graph is required.
4 CONCLUSIONS
We demonstrate here that the interactive tool seg-
ments successfully the salient features in true images,
and can identify hidden important features and han-
dle efficiently noisy images. As such the separation
deviation interactive tool and algorithm is a useful ad-
dition to a segmentation tool box which considerably
enhances current capabilities.
ACKNOWLEDGEMENTS
The author’s research has been supported in part by
CBET-0736232 and NSF award No. DMI-0620677.
REFERENCES
Chandran B. G. and Hochbaum. D. S. Pseud-
oflow solver, accessed January 2007.
http://riot.ieor.berkeley.edu/riot/Applications /Pseud-
oflow/maxflow.html.
D. L. Collins, A.P. Zijdenbos, V. Kollokian, J.G. Sled, N.J.
Kabani, C.J. Holmes, A.C. Evans. Design and Con-
struction of a Realistic Digital Brain Phantom. IEEE
Transactions on Medical Imaging 17:3, p.463–468,
June 1998.
Geiger D. and Girosi F. 1991. Parallel and deterministic
algorithms for MRFs: surface reconstruction. IEEE
Transactions on Pattern Analysis and Machine Interl-
ligence, PAMI-13 pp.401-412.
Geman S. and Geman D. 1984. Stochastic relaxation, gibbs
distributions and the bayesian restoration of images.
IEEE Transactions on Pattern Analysis and Machine
Intelligence, PAMI-6 pp 721–741.
D. S. Hochbaum. The Pseudoflow algorithm: A new al-
gorithm for the maximum flow problem. Operations
Research, 58(4):992–1009, 2008.
D. S. Hochbaum. An efficient algorithm for image segmen-
tation, Markov random fields and related problems.
Journal of the ACM, 48(4):686–701, 2001.
AN EFFICIENT AND EFFECTIVE IMAGE SEGMENTATION INTERACTIVE TOOL
461
