
MODELING OF REAL TIME VIDEO COMPRESSION SYSTEM
Three-dimensional Discrete Cosine Transform
Tomas Fryza
Department of Radio Electronics, Brno University of Technology, Purkynova 118, Brno, Czech Republic
Keywords:
Video signal compression, 3-D DCT, complexity, implementation, DSP TMS320C6711, C language, linear
assembler.
Abstract:
One of the methods used for the video signals’ compression is the Three Dimensional Discrete Cosine Trans-
form. The aim of this block-based method is to combine intraframe and interframe coding into a single
transform coding, therefore no motion compensation and motion prediction have to be implemented. The
paper deals with the practical ways of the 3-D DCT computing. It will be proof, the transform coding could
be used for encoding of video sequences in real time domain.
1 INTRODUCTION
A video compression method has two purposes: a) re-
duce spatial redundancy between adjacent picture el-
ements by intraframe coding and b) reduce temporal
redundancy between adjacent frames with help of in-
terframe coding. Individual compression algorithms
use different mechanisms to achieve these principles.
The 3-D DCT (Three Dimensional Discrete Cosine
Transform) is based on a consolidation of both coding
into a single transform coding where several frames
are being encoded simultaneously. The substance of
3-D DCT is similar to the JPEG standard (Wallace,
1992). Each group of N frames is divided into small
segments (so-called video cubes). From these video
cubes, the frequency coefficients and output binary
stream are being formed.
The contribution presents the fundamental prop-
erties of the 3-D DCT and mainly the conditions for
utilization such a method in real time processing do-
main. The paper is divided into three parts. In Sec-
tion 2 the mathematical background of different 3-
D DCT variations is presented. The Section 3 discuss
the minimal hardware demands for real time opera-
tion and final results are given in Section 4.
2 TRANSFORM CODING
As mentioned above in 3-D DCT compression
scheme the succession of input frames is divided into
groups of N frames. The value of N controls not only
the amount of allocated memory space for captured
samples or the number of repetition per second but
also the mathematical complexity of the encoder it-
self.
Entire encoding scheme could be split into a pre-
processing phase where the input samples could be
resampled or represented into different color space.
Next part of the encoder is the transform coding it-
self, and finally a postprocessing phase with a quan-
tizer and threshold processes. Last part compounds
of the entropy encoding and forming of the output bit
stream.
The analysis of the complexity proportion of indi-
vidual encoder parts proves the 3-D DCT transform
coding is the most consuming process of entire en-
coding stage. Thus, in the next text only the transform
coding is analyzed by reason of the estimation of real
time processing possibilities.
For video cube dimensions of N, the forward
3D DCT for a grey-scale video sequence is defined
in the following way (Rao and Yip, 1990)
D
u,v,w
= γ
u
γ
v
γ
w
·
N−1
∑
x=0
N−1
∑
y=0
N−1
∑
z=0
f
x,y,z
·cos
πu(2x + 1)
2N
·
·cos
πv(2y + 1)
2N
·cos
πw(2z + 1)
2N
(1)
where D
u,v,w
represents DCT (frequency) coefficient
of a picture element intensity f
x,y,z
while u, v, w =
0,1,..., N −1. The constants γ could be expressed
as follows
γ
u,v,w
= 1/
√
2 : u,v,w = 0
1 : u,v,w 6= 0.
208
Fryza T. (2008).
MODELING OF REAL TIME VIDEO COMPRESSION SYSTEM - Three-dimensional Discrete Cosine Transform.
In Proceedings of the International Conference on Signal Processing and Multimedia Applications, pages 208-211
DOI: 10.5220/0001938102080211
Copyright
c
SciTePress

The 3-D DCT definition from (1) implies high
number of arithmetical operations. Therefore, the 3-
D transform could be re-write in a form of successive
three 1-D transforms with obvious impact in reduct-
ing of mathematical operations. In the next text two
fast algorithms for evaluating of 1-D transform with
different value of N are outlined.
2.1 8-point Discrete Cosine Transform
Let N = 8, then one dimensional discrete cosine trans-
form for a single color palette is defined by (2), while
u = 0, 1,. .. ,7.
D
u
= γ
u
·
7
∑
x=0
f
x
·cos
πu(2x + 1)
16
(2)
In purpose of reducing the mathematical opera-
tions, the multiplying by constant γ
u
could be com-
pound into a quantizer block, i.e. into the last part
of video encoder (post processing part). In practice,
the evaluation of 1-D DCT is obtain with help of Dis-
crete Fourier Transform and through the set of modi-
fied equations (Gonzalez and Wintz, 1987):
ℜ{F
0
} = 2 ·( f
0
+ f
1
+ f
2
+ f
3
+ f
4
+ f
5
+ f
6
+ f
7
)
ℜ{F
1
} = f
0
− f
7
+C
0
·I
0
+C
1
·I
1
−C
2
·(I
1
−I
2
)
ℜ{F
2
} = f
0
− f
3
− f
4
+ f
7
+C
0
·I
3
(3)
ℜ{F
3
} = f
0
− f
7
−C
0
·I
0
−C
3
·I
2
−C
2
·(I
1
−I
2
)
ℜ{F
4
} = f
0
− f
1
− f
2
+ f
3
+ f
4
− f
5
− f
6
+ f
7
ℜ{F
5
} = f
0
− f
7
−C
0
·I
0
+C
3
·I
2
+C
2
·(I
1
−I
2
)
ℜ{F
6
} = f
0
− f
3
− f
4
+ f
7
−C
0
·I
3
ℜ{F
7
} = f
0
− f
7
+C
0
·I
0
−C
1
·I
1
+C
2
·(I
1
−I
2
)
where ℜ{F
u
} represents real part of Fourier coeffi-
cients and constants C
i
are defined as follows
C
0
= cos(4π/16) (4)
C
1
= cos(2π/16) + cos(6π/16)
C
2
= cos(2π/16)
C
3
= cos(2π/16) −cos(6π/16)
and combinations of input samples I
i
are given by
I
0
= f
1
+ f
2
− f
5
− f
6
(5)
I
1
= f
2
+ f
3
− f
4
− f
5
I
2
= f
0
+ f
1
− f
6
− f
7
I
3
= f
0
+ f
1
− f
2
− f
3
− f
4
− f
5
+ f
6
− f
7
.
According to the (3)-(5), 5 products operations
and 29 sums operations have to be performed in or-
der to evaluate eight 1-D coefficients. In every video
cube, this 1-D transform have to be repeated 192
times to obtain 512 frequency coefficients. Imaging
a test grayscale video sequence with dimensions of
720 ×576 picture elements and length of 24 frames.
Therefore the minimal number of arithmetical oper-
ations for encoding such a sequence is 18,662,400
products and 108,241,920 sums (Fryza and Hanus,
2003).
2.2 4-point Discrete Cosine Transform
According to (1), the one dimensional 4-point for-
ward discrete cosine transform could be express as
follows
D
u
=
3
∑
x=0
f
x
·cos
πu(2x + 1)
8
(6)
where u = 0, 1,. ..,3. Applying the similar proce-
dures mentioned in (Gonzalez and Wintz, 1987), the
set of modified equations for fast calculations of 4-
point 1-D DCT could be evaluated. Using the exten-
sion of 4 input samples in term of f
x
= f
7−x
and using
the Discrete Fourier Transform defined by (7), the 1-
D DCT could be expressed by (8).
F
u
=
7
∑
x=0
f
x
·exp(−2π ju ·x/8) (7)
3
∑
x=0
f
x
·cos
πu(2x + 1)
8
=
ℜ{F
u
}
2 ·cos(
πu
8
)
(8)
The left part of equation (8) is equal to the 1-D
DCT. Therefore, 1-D transform could be evaluated by
real parts of Fourier coefficients divided by the real
constant 2 ·cos(
πu
8
). Likewise the γ values, the con-
stant could be also incorporated in quantizer block of
the encoder. Hence, the only task is to enumerate the
real parts of F
u
. It could be done by the set of equa-
tions defined below
ℜ{F
0
} = 2 ·( f
0
+ f
1
+ f
2
+ f
3
) (9)
ℜ{F
1
} = f
0
− f
3
+ cos
2π
8
·( f
1
− f
3
− f
2
+ f
0
)
ℜ{F
2
} = f
0
− f
2
+ f
3
− f
1
)
ℜ{F
3
} = f
0
− f
3
−cos
2π
8
·( f
1
− f
3
− f
2
+ f
0
)
It can be seen the number of necessary arithmeti-
cal operation for 4-point 1-D DCT is 1 product and 9
sums. Nevertheless, according to the smaller blocks
of input samples encoded in one moment, the to-
tal number of operations for transforming the tested
video sequence from Subsection 2.1 (720 ×576 ×24)
is 7,464,960 products and 67,184,640 sums, i.e. lower
number.
MODELING OF REAL TIME VIDEO COMPRESSION SYSTEM - Three-dimensional Discrete Cosine Transform
209
3 COMPLEXITY VERIFICATION
In this section, the models of evaluated transform cod-
ing are being verified in order to verify the real time
processing possibilities. According to the simplifica-
tion applied in Section 2, the criterion for examina-
tion of real time processing is only the calculation of
3-D DCT.
The algorithms mentioned in Subsections 2.1
and 2.2 were programed for digital signal proces-
sor TMS320C6711 from Texas Instruments in C lan-
guage and in so-called linear assembler. The linear
assembler is an interstage between high level C lan-
guage and low level assember code. The floating-
point processor TMS320C6711 contains eight func-
tional units such as hardware multiplier unit or unit
for memory accessing, 32 32-bit registers and it is
controlled by the clock signal with a relatively low
frequency of 150MHz. The basic tool for evaluating
of the algorithm velocity is a total number of CPU
cycles. Every instruction of DSP has a specific num-
ber of needed cycles and the number depends on the
type of instruction. In general the most consuming
instructions are the accessing the memory and multi-
plication in double or even in extended floating-point
precisions.
The total number of needed CPU cycles for 8-
point and 4-point 1-D DCT is shown in Table 1 and in
Table 2 respectively. The estimated time for encod-
ing the grey scaled video sequence with dimensions
of 720 ×576 ×24 are shown as well. The parameters
-o0, -o1, -o2 and -o3 correspond to the level of source
code optimizing. Parameter -o0 enables the register
level optimizing, -o1 and -o2 starts function level op-
timizing and parameter -o3 corresponds to the opti-
mizing on file level. The optimizing could be done
by the Code Composer Studio development software
from Texas Instruments.
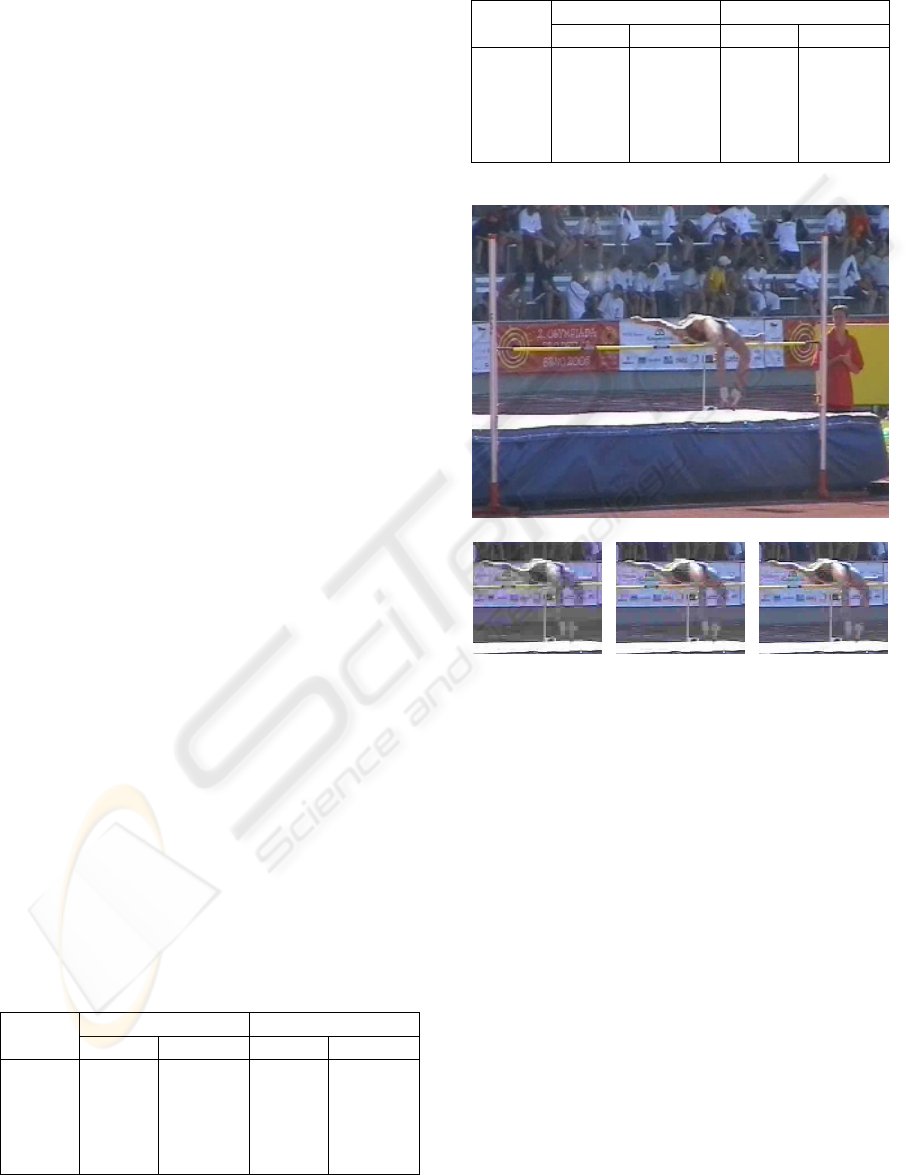
An example of using the 4-point version of DCT
encoder for real video sequence processing is shown
in Fig. 1, where one frame from original sequence
and three details with different quality levels are pre-
sented.
Table 1: CPU cycles for 8-point 1-D DCT and duration of
transforming a grayscale video sequence (720 ×576 ×24,
f
CPU
= 150MHz).
C code ASM code
Param. Cycles Time [s] Cycles Time [s]
no opt. 57,655 22.42 10,284 4.00
-o0 52,759 20.51 10,284 4.00
-o1 26,226 10.20 5,206 2.02
-o2 15,527 6.04 2,144 0.83
-o3 15,527 6.04 2,144 0.83
Table 2: CPU cycles for 4-point 1-D DCT and duration of
transforming a grayscale video sequence (720 ×576 ×24,
f
CPU
= 150MHz).
C code ASM code
Param. Cycles Time [s] Cycles Time [s]
no opt. 5,470 17.01 1,054 3.28
-o0 4,615 14.35 1,054 3.28
-o1 2,975 9.25 702 2.18
-o2 1,583 4.92 417 1.30
-o3 1,583 4.92 417 1.30
Figure 1: A frame of tested sequence ”high jump” encoded
by 4-point encoder version with different quality levels.
It can be seen the combination of lower level pro-
gramming languages and the optimizing tools are un-
avoidable to achieved the code effective applications.
Also it can be seen the only possibility for encod-
ing a grey scaled sequence with PAL resolutions on
DSP TMS320C6711 (controlled by f
CPU
= 150MHz)
is using the 8-point fast algorithm version with maxi-
mal level of optimizing.
4 CONCLUSIONS
The contribution was focused into the video compres-
sion domain, and mainly into the modeling of the real
time 3-D DCT encoding system. This 3-D system is
used to replace two ways of video compression, i.e.
intraframe and interframe coding. In the paper two
versions of fast 1-D algorithms were outlined, for 8-
point and 4-point DCT system. It was proved the total
SIGMAP 2008 - International Conference on Signal Processing and Multimedia Applications
210

number of needed mathematical operations and mem-
ory demands declines with the selected N-point ver-
sion. The better picture quality of encoded video se-
quences could be reached by low-point DCT version
as well (Fryza and Hanus, 2004). The practical veri-
fication of the 3-D DCT calculation on floating-point
digital signal processor TMS320C6711 was also de-
scribed. The criteria was the total number of CPU
cycles. Only the high capability of the Texas Instru-
ments optimizing tools cause the 3-D DCT transform
based on 8-point 1-D DCT could be usable in real
time processing domain.
ACKNOWLEDGEMENTS
The author would like to thank for the financial
support of the Czech Ministry of Education, Youth
and Sports under grants no. MSM 002 163 0513,
1880250/2008 and of the Czech grant agency of Sci-
ence Academy grant no. KJB 208 130 704.
REFERENCES
Fryza, T. and Hanus, S. (2003). Algorithms for fast com-
puting of the 3d dct transform. Radioengineering,
12(1):23–26.
Fryza, T. and Hanus, S. (2004). Dissimilarity detection in
video sequences using variation in time domain. In
Radioelektronika 2004 Conference Proceedings. FEI
STUBA.
Gonzalez, R. and Wintz, P. (1987). Digital Image Process-
ing. Addison Wesley Publishing Company, Boston,
2nd edition.
Rao, K. and Yip, P. (1990). Discrete Cosine Transform. Al-
gorithms, Advantages, Applications. Academic Press,
Inc., San Diego, 1nd edition.
Wallace, G. (1992). The jpeg still picture compression stan-
dard. IEEE Transactions on Consumer Electronics,
38(1):xviii–xxxiv.
MODELING OF REAL TIME VIDEO COMPRESSION SYSTEM - Three-dimensional Discrete Cosine Transform
211
