
SEPARATING PROGRAM SEMANTICS FROM DEPLOYMENT
Nurudeen Lameed and Peter Grogono
Department of Computer Science and Software Engineering, Concordia University
1455 de Maisonneuve Blvd. W, Montreal, Canada
Keywords:
Concurrency, mapping, communication, protocol, abstraction.
Abstract:
Designing software to adapt to changes in requirements and environment is a key step for preserving software
investment. As time passes, applications often require enhancements as requirements change or hardware en-
vironment changes. However, mainstream programming languages lack suitable abstractions that are capable
of providing the needed flexibility for the effective implementation, maintenance and refactoring of parallel
and distributed systems. Software must be modified to match today’s needs but must not place even greater
strain on software developers. Hence, software must be specially designed to accommodate future changes.
This paper proposes an approach that facilitates software development and maintenance. In particular, it ex-
plains how the semantics of a program can be separated from its deployment onto multiprocessor or distributed
systems. Through this approach, software investment may be preserved when new features are added or when
functionality does not change but the environment does.
1 INTRODUCTION
Advances in software development practices facili-
tated the programming of many hard problems. Many
interesting and crucial problems have been solved.
The success however, is generating an increasing de-
mand for ever more challenging computations. Con-
sequently, softwareis becoming increasingly complex
to design. To cope with this challenge, various tools,
languages and techniques have been proposed, imple-
mented and utilized. The transition from procedu-
ral to object-oriented programming helped to facili-
tate the construction of software that otherwise would
have been inconceivable. However, increase in soft-
ware complexity as a result of changes in environ-
ment and functionality has exposed some significant
limitations of object-oriented approach: current prac-
tice makes software enhancement and refactoring dif-
ficult.
Furthermore, the drive for continued performance
gains is causing major processor manufacturers to
produce microprocessors with multiple cores on a
chip. Multi-core architectures have potentials to boost
performance. However, existing applications are
largely sequential. To achieve true performance gains
software must be carefully written to exploit hardware
parallelism (Olukotun and Hammond, 2005; Sutter,
2005a). But concurrent programmingis hard. Experts
agree that concurrent programming is hard because
mainstream programming languages do not provide
suitable abstractions for expressing and controlling
concurrency. (Lee, 2006; Sutter, 2005b; Harris and
Fraser, 2003).
We have implemented our approach in a new
process-oriented language named Eramsus. Although
in this paper, we describe the approach within the
context of Erasmus; we believe due to the nature of
process-oriented design, the approach can be imple-
mented in any process-oriented language. The paper
is structured into the following sections: section 2 ex-
amines the object and the process-oriented models;
section 3 briefly describes the Erasmus programming
language; section 4 explains how software compo-
nents may be mapped onto processors; section 5 ex-
amines the implementation; section 6 discusses test-
ing and performance evaluation; section 7 discusses
the results; section 8 reviews some related work and
finally, section 9 concludes the paper.
2 THE OBJECT AND THE
PROCESS MODELS
This section reviews the object-oriented and the
process-oriented models.
63
Lameed N. and Grogono P. (2008).
SEPARATING PROGRAM SEMANTICS FROM DEPLOYMENT.
In Proceedings of the Third International Conference on Software and Data Technologies - PL/DPS/KE, pages 63-70
DOI: 10.5220/0001877300630070
Copyright
c
SciTePress

2.1 The Object-Oriented Model
Object-oriented programming has been very success-
ful for general purpose programming tasks for almost
two decades. It is hard to imagine another paradigm
replacing it. The idea behind OO programming is that
an object encapsulates data and provides controlled
access to the data via its methods; the behaviour of
an object is determined by its class and may be ex-
tended incrementally through inheritance. In practice
however, OO programming has become more com-
plex than this simple model suggests. For instance,
an object does not have control over the sequence in
its methods are called. Thus, it cannot ensure that an
initialization method is called before any other meth-
ods (Grogono et al., 2007). This makes it difficult to
design objects. The designer must handle all possible
calling sequences or trust clients to call methods in
the intended sequence. The compiler cannot enforce
correct call sequencing.
Object-oriented languages have extended levels of
visibility because the original levels of visibility —
private, public and protected — were inadequate. The
extensions such as package scope, static method, in-
terfaces, inner classes, anonymous inner classes, sim-
plify programming but make application maintenance
difficult.
2.2 The Process-Oriented Model
The process-oriented model represents an alternative
to the object-oriented model. A process is a program
module that defines a data structure and a sequence
of statements that operate on it. The idea of organiz-
ing programs into collections of processes is not new.
This idea was pioneered at MIT in the CTSS project
(Salzer, 1965).
The benefits of the process-oriented model are
well known. Processes are more general. They are
loosely coupled and have more autonomy as com-
pared to objects. This is because they only have ef-
fect on one another during rare and brief communi-
cation. In addition, unlike objects that do not have
control over the way in which its methods are called,
a process owns its thread of control and can choose
when to communicate or not communicate. Besides,
if a process operates only on its private data, it will be
completely independent of other processes. Dijkstra
declares:
We have stipulated that processes should be
connected loosely; by this we mean that apart
from the (rare) moments of explicit intercom-
munication, the individual processes them-
selves are to be regarded as completely inde-
pendent of each other. (Dijkstra, 1968)
Process-based code can be refactored into object-
based code but the converse is difficult, if not impossi-
ble. It is easier to map processes onto multiple address
spaces than objects. Furthermore, it is often easier to
model applications with processes than objects.
Processes have been utilized in operating sys-
tems and programming languages. Hoare (Hoare,
1978) proposed communicating sequential processes
as a method of structuring programs. Joyce
(Brinch Hansen, 1987), Erlang (Armstrong et al.,
2004), Occam-π (Barnes and Welch, 2003; Barnes
and Welch, 2004) are based on communicating pro-
cesses. The next section describes the Erasmus Pro-
gramming language.
3 THE LANGUAGE, ERASMUS
The programming language, Erasmus is being de-
veloped by Peter Grogono at Concordia University,
Canada and Brian Shearing at The Software Factory,
UK. Erasmus is based on communicating processes.
Concurrency in Erasmus is based on communicat-
ing processes. A closure is an autonomous process
with its own state and instructions. Closures may have
parameters and communicate over synchronous chan-
nels satisfying some well-defined protocols. A port
serves as an interface for a closure to communicate
with another closure.
The basic building block of an Erasmus program
are cells, closures and protocols. A cell is a collection
of one or more closures. Protocols define constraints
on messages that can be transferred with any port that
is associated with the protocol. Cells and processes
can be created dynamically. Erasmus cells, processes
and ports are first-class entities: they can be transmit-
ted from one process to another and may be sent over
a network. A program is a sequence of definitions fol-
lowed by the instantiation of a cell. An example of a
simple Erasmus program is
sayHello = {| sys.out := "Hello"; };
cell = ( sayHello() );
cell ();
The program prints the string “Hello” to the stan-
dard output device. It comprises of a process named
sayHello, followed by a cell definition and an instan-
tiation of the cell. When the cell is instantiated, it
instantiates sayHello, and sayHello starts to execute.
ICSOFT 2008 - International Conference on Software and Data Technologies
64
4 MAPPING OF CELLS TO
PROCESSORS
Erasmus separates program semantics from its de-
ployment: programmer defines cells and messages
that cells exchange; separately, the programmer spec-
ifies how cells are assigned to processors — a task
commonly referred to as mapping. This clear sepa-
ration of concerns makes it possible to use the same
syntax for communications regardless of the environ-
ment.
The explicit mapping of cells onto processors has
several other benefits. Cells that communicate fre-
quently may be mapped onto processors that are phys-
ically close to reduce communication time. Being fa-
miliar with the nature of the problem that is solved
by the program, programmer may map cells onto pro-
cessors considering the specific nature of the prob-
lem and the characteristics of the individual proces-
sors (Bal et al., 1989).
Erasmus program may be compiled to run on a
standalone system. The same program may be re-
compiled to run on a multicomputer — a network of
computers with independent memory. Furthermore,
the program code may be moved to a multiprocessor
system with shared memory. All this is possible with-
out changing the source program. However, compi-
lation of an Erasmus program for a multiprocessor
or distributed system requires a separate configura-
tion file that specifies specific detail about mapping
of cells onto the participating processors.
A typical configuration file is an XML file; it
contains specific properties about processors encap-
sulated within a pair of
<mapping>
and
</mapping>
tags. A record is defined for each processor within
<processor>
and
</processor>
. A processor
record specifies the name of the processor, the port
number of its communicating agent called broker
and, a list of cells mapped onto this processor. The
port number is enclosed within a pair of
<port>
and
</port>
tags. A cell is defined within
<cell>
and
</cell>
. A sample configuration file is shown be-
low.
<mapping>
<processor> alpha.encs.concordia.ca
<port> 5555 </port>
<cell> squareCell </cell>
</processor>
<processor> latvia.encs.concordia.ca
<port> 5556 </port>
<cell> clientCell </cell>
</processor>
</mapping>
The configuration file shown above maps
squareCell onto the processor identified by
alpha.encs.concordia.ca and clientCell onto
latvia.encs.concordia.ca. If the following pro-
gram is compiled without any configuration file, it
generates code for standalone systems. However,
the two cells: squareCell and clientCell may be
mapped onto different processors as shown in the
configuration file above.
sqProt = [*(query:Float; ˆreply:Text)];
square = { p: +sqProt |
loop
q: Float := p.query;
p.reply := text (q * q);
end };
squareCell = (prot: +sqProt |
square(prot) );
client = { p: -sqProt |
num : Float := 10;
p.query := num;
sys.out := text num + "ˆ2 = ";
sys.out := p.reply + "\n"; };
clientCell = ( prot: -sqProt |
client(prot) );
mainCell = ( chan: sqProt;
clientCell(chan);
squareCell(chan) );
mainCell();
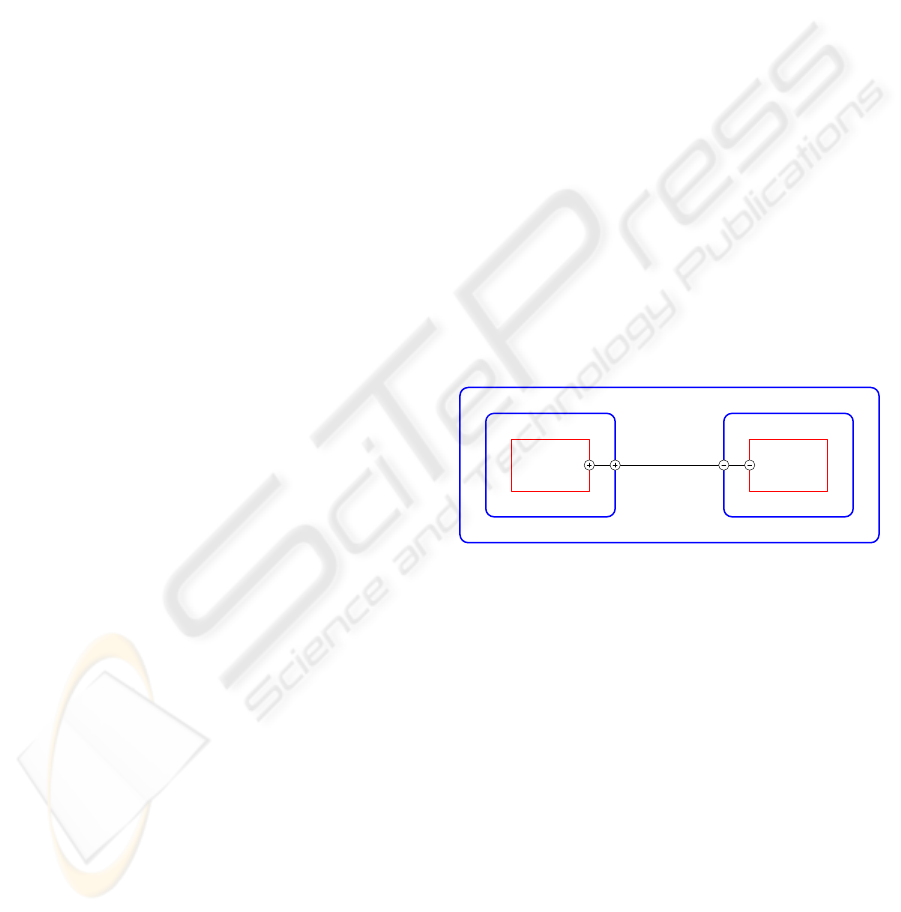
square
client
squareCell clientCell
mainCell
chan: sqProt
p p
Figure 1: A diagram corresponding to the program above.
In the program shown above, two cells, client-
Cell and squareCell are connected to a channel named
chan through their local ports. Figure 1 shows a di-
gram corresponding to the program. The ports use
the protocol defined by sqProt. The processes square
and client have ports that are connected to chan as
shown in Figure 1. A port that provides a service is
referred to as a server port and is declared using the
prefix
‘+’
before the name of the protocol associated
with the port. A port that needs a service is called a
client port and is declared using the symbol
‘-’
. A
port declaration with no sign creates a channel.
The port p of square is a server port (i.e. it pro-
vides a square service) while client has a client port
i.e it needs a square service. When mainCell is instan-
tiated, clientCell and squareCell are also instantiated.
This causes a concurrent execution of processes in the
two cells. The cell clientCell sends a number (10) to
SEPARATING PROGRAM SEMANTICS FROM DEPLOYMENT
65
the squareCell via its local port, prot. The squareCell
sends a reply (i.e. a string containing 100, the square
of 10) to the client.
4.1 Compilation Process
Compilation of an Erasmus program that comprises
of cells mapped onto some processors requires a con-
figuration file. The compiler reads the XML file, ex-
tracts the data and organizes the contents into a ta-
ble. The compiler generates a unique identification
for each cell. Later, it retrieves mapping information
for each cell. This is eventually written to a file —
hosts.txt — in an order determined by cell id; each
line of the file contains a record about a cell. If there
is no entry for a cell in the configuration file, ‘local-
host’ and port number 0 is written for the cell. This
indicates that any available processor may execute the
cell.
5 IMPLEMENTATION
5.1 Inter-process Communication
Various approaches for implementing communica-
tion and synchronization between isolated processes
have been proposed and implemented. Gregory An-
drews (Andrews, 2000) proposed a centralized mes-
sage passing implementation that uses a “clearing
house”. A clearinghouse process matches pairs of
communication requests. A template is a message
that describes a communication request. When a pro-
cess wants to communicate, it sends a template or a
set of templates, if several communications are pos-
sible. When the clearinghouse receives a template, it
checks if it has received before a “matching” template
otherwise, it stores the template. If it has a match-
ing template, it sends some synchronization messages
to the processes that sent the templates. These pro-
cesses then use the information received from the
clearinghouse to communicate. Subsequently, both
processes continue at their next statements after ex-
changing data.
A disadvantage of a centralized implementation
is the inherent potential for the clearinghouse to be-
come a bottleneck in the system. This is likely to be
exacerbated where large number of processes is in-
volved. Other implementations can be found in (Sil-
berschatz, 1979; Bernstein, 1980; Schneider, 1982;
Buckley and Silberschatz, 1983; Bagrodia, 1989).
The implementation described in this section uses a
distributed clearinghouse for inter-process communi-
cation. Since we require reliable communications and
TCP/IP guarantees that messages are delivered in the
order in which they have been sent, our implementa-
tion is based on TCP/IP.
5.2 The Broker Process
Each processor runs a special process named broker.
The broker is responsible for handling all commu-
nications by processes. The port address on which
the broker attached to a processor runs is specified as
a property of the processor in the configuration file.
During start-up, a broker loads a table with the data
from the file, hosts.txt created earlier during compila-
tion by the compiler. As described earlier, a record in
hosts.txt comprises of a host name and a port number.
A broker also maintains a table of valid connections
to cells and brokers running on other hosts. Brokers
are daemons that match communications.
A cell that wishes to communicate with another
cell sends the request to its local broker. Cells must
first establish connections to their local brokers before
executing any instructions. If a connection has been
established, the cell activates its processes. Mean-
while, the broker listens for requests from commu-
nicating agents (cells or brokers). When a broker re-
ceives such request, it stores it until it finds a matching
request from another cell. The message transferred in
a particular request depends on whether the request is
a read (receive) or write (send) operation.
The distributed nature of the broker reduces the
likelihood of a broker becoming a bottleneck in sys-
tem. Messages received by a broker are addressed to
cells running on the host.
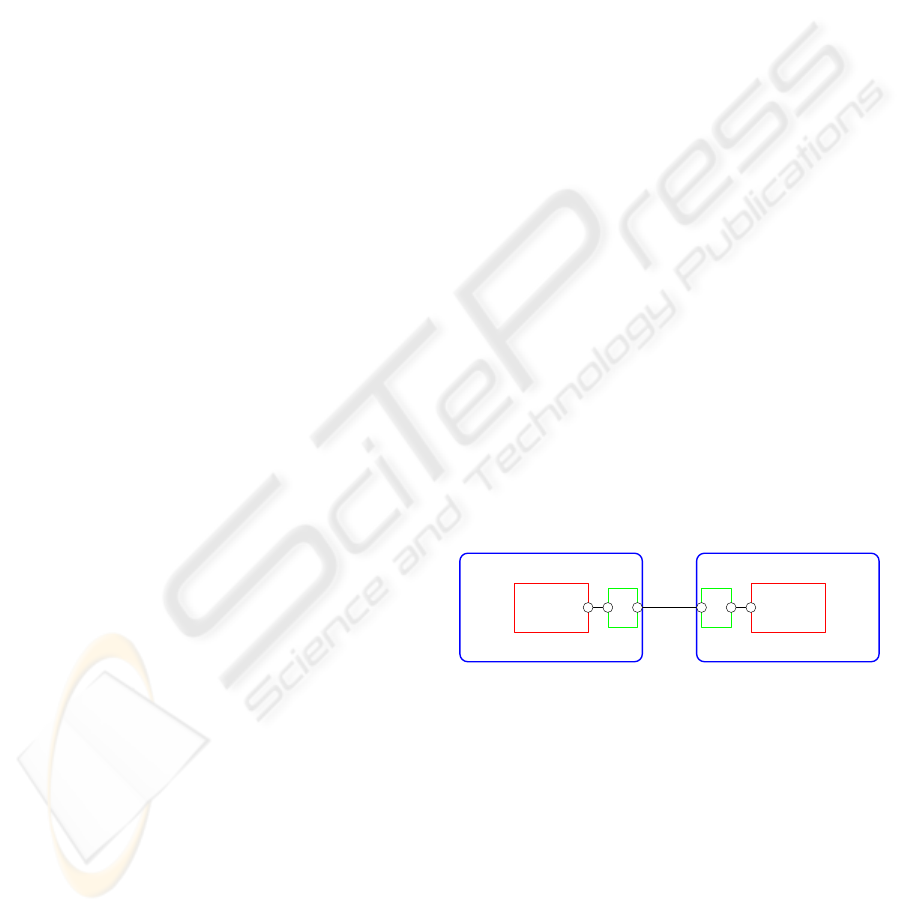
server
client
broker broker
hostA hostB
Figure 2: The broker process.
Every cell that communicates with another cell is
given a port to do so. A port is connected to a shared
channel. A channel connects two or more processes.
Ports are shown in the diagram as small circles. Com-
munication takes place when a port is referenced (i.e.
a qualified name refers to a field of the associated pro-
tocol). When a process in a cell sends a message to
another cell, it constructs a message containing some
useful headers and sends the message to the broker
running on the host. The broker inspects the mes-
sage and retrieves some of the headers to determine
the location of the communicating partner. A mes-
sage comprises of
ICSOFT 2008 - International Conference on Software and Data Technologies
66

1. a port direction (0 or 1) which indicates whether
the sending port is a server or a client;
2. the cell id of the server connected to the channel;
3. the cell id of the source of the message;
4. policy type; values include: 0 (
ordered
), 1
(
fair
) and 2 (
random
);
5. input/output direction; 0 for read and 1 for write;
6. the type of the data carried, if the request is a write
operation;
7. the id of the destination cell (client/server);
8. a tag for the beginning of the data;
9. the data to be sent, if it is a write operation; empty
if it is a read operation;
10. a tag for the end of the data; a message may carry
more than one request.
When a process sends a write request to a broker,
it sends along with the message, the data to be written
to the other process. If the broker receives a match-
ing request, the data is copied into the variable of the
other process and both the sender and the receiver can
proceed independently and concurrently. Considering
the program and the XML file shown in shown in Sec-
tion 4, when squareCell executes
q:Float := p.query;
assuming that squareCell and clientCell have been as-
signed unique ids, 1 and 2 respectively, the compiler
builds a message (used later by the runtime system to
send and receive data) of this form:
1 2 3 4 5 6 7 8 9 10
----------------------------------------
| 0 | 1 | 1 | 0 | 0 | 1 | 2 | $ | | $ |
----------------------------------------
items at the subscripts 1-7, corresponds to the items
1-7 of the list describing the contents of a message.
Items eight and ten (“$$”) are tags that demarcate re-
spectively, the beginning and the end of the data in a
message. This is a read request, hence item nine —
the data — is empty.
This message (“
0 1 1 0 0 1 2 $$
”) is then sent
to the broker. When the broker receives the message,
it retrieves the first two items in the message and per-
forms one of the following two actions:
1. if the port is a client port, it checks whether the
server that is connected to the channel is running
on this host or on a remote host. If the server is on
a remote host, it forwards the request to the broker
running at the host of the server and waits for a
reply from the broker. The reply is subsequently
forwarded to the client cell.
2. if the port is a server port, the broker queues the
message until (hopefully) a matching request is
received from the client.
Therefore in this case, the broker running on al-
pha.encs.concordia.ca forwards the message to the
broker running on latvia.encs.concordia.ca. This
message is matched by the receiving broker when it
receives a matching request i.e. a message of the form
1 1 2 0 1 1 1 $d$
from clientCell. The symbol d
denotes the data which can be of any size. This mes-
sage is generated when clientCell executes the state-
ment
p.query := num;
Typically, the communication broker marshals the
data carried in a message before sending the mes-
sage to a broker on another host. It unmarshals the
data when it receives a message from another bro-
ker. As an optimization, this process, i.e. mar-
shalling/unmarshalling may be avoided if both the
source and the destination hosts are known to have
the same architecture.
Matching occurs when a broker receives two mes-
sages: one from a client and another from a server.
The two input/output requests must be opposite. One
must be a read operation while the other must be a
write operation. The type of the data in the messages
must also match. The compiler checks the type and
direction of each message, ensuring that communi-
cation cannot fail at runtime. During matching, data
received is copied and sent to the process executing
a read command. The message may contain a set of
requests if the process is willing to communicate with
more than one process.
6 TESTING
The compiler has been used to compile the program
shown in Section 4 for a standalone computer. The
same program was also distributed on two computers:
the server cell running in one process on a computer
while the client runs in another process in a differ-
ent host. The broker processes on both hosts matched
communications between these cells. The program
works as a client-server system as specified by proto-
col sqProt. The client process sends a request to com-
pute the square of 10. The server responds by sending
the corresponding result (100) to the client. Although
the program (Section 4) solves a trivial problem, it
nevertheless shows how Erasmus facilitates distribu-
tion of programs to different architectures. In prac-
SEPARATING PROGRAM SEMANTICS FROM DEPLOYMENT
67

tice, this approach may help preserve software invest-
ment where software environment changes.
Tests conducted to evaluate impact of communi-
cations on the overall performance of programs writ-
ten in Erasmus are described next. The two com-
puters used for these tests, i.e. { latvia, lithuania }
.encs.concordia.ca have the same specification. The
specification is given below:
• Intel(R) Pentium(R) 4 CPU 3.00 GHz, 2.99 GHz,
1.00 GB of RAM; Operating System: Windows
XP Professional, version 2002; Service Pack 2.
The tests are grouped into two cases namely:
6.1 Case One
sp = [*(ask:Integer; ˆanswer:Integer)];
square = { p: +sp |
loop
in: Integer := p.ask;
x: Integer := in * in;
--- do more work
j: Integer := 0;
loop while j < 1000000 j += 1; end;
p.answer := x; end };
client = { p: -sp | x: Integer := 1;
loop
xs: Integer := x * x;
sys.out := text x + "ˆ2=" + text xs +"\n";
--- do more work
j: Integer := 0;
loop while j < 1000000 j += 1; end;
x := x + 1;
if x > 1500 then exit end end };
squareCell = ( p: +sp | square(p) );
clientCell = ( p: -sp | client(p) );
cell = (p: sp; clientCell(p);squareCell(p));
cell();
Considering the last program (above), it takes
145s
on latvia.encs.concordia.cafor clientCell to dis-
play the squares of the numbers from 1 to 1500. In
the program, clientCell essentially performs the re-
quired computation since no request whatsoever was
sent from clientCell to squareCell.
• Scenario One: if clientCell in the previous pro-
gram is replaced with the clientCell given below,
it takes
289s
to display the squares. In this case,
clientCell communicates frequently with square-
Cell by sending numbers whose squares are com-
puted by squareCell through the port p.
client = { p: -sp |x: Integer := 1;
loop
p.ask := x;
xs: Integer := p.answer;
sys.out := text x + "ˆ2=" + text xs +"\n";
--- do more work
j: Integer := 0;
loop while j < 1000000 j += 1; end;
x := x + 1;
if x > 1500 then exit end end };
Both clientCell and squareCell run in one mem-
ory space and therefore the compiler generates code
that is executable on a standalone computer. No con-
figuration file is required and none was used in this
scenario. The difference in the elapsed-times (145s
vs 289s) for clientCell to display all the computed re-
sults can be attributed to the communication overhead
in executing the program above.
• Scenario Two: if this program is compiled using
the configuration file shown below, it takes
236s
on latvia.encs.concordia.ca for clientCell running
in a separate address space to display the squares
of the numbers from 1 to 1500. It is interesting to
note that clientCell runs faster than in the previous
scenario. This suggests that the combined over-
head of the inter-process communication and the
runtime process scheduling overheads is higher in
scenario one than the communicationdelay in sce-
nario two.
<Mapping>
<Processor> latvia.encs.concordia.ca
<Port> 5555 </Port>
<Cell> squareCell </Cell>
<Cell> clientCell </Cell>
</Processor>
</Mapping>
• Scenario Three: if the same program is compiled
with the configuration file shown below, it takes
clientCell running on latvia.encs.concordia.ca
241s
to completely display the squares of all the
numbers from 1-1500 as specified in the program.
This is slightly longer than that in scenario two.
This means that in this case, clientCell runs slower
than in scenario two. Frequent network communi-
cations between the client process in one host and
the server process in another host cause delays,
which are likely to offset any performance gains
in faster execution of clientCell due to the host’s
processor having fewer processes to execute.
<Mapping>
<Processor> latvia.encs.concordia.ca
<Port> 5555 </Port>
<Cell> clientCell </Cell>
</Processor>
<Processor> lithuania.encs.concordia.ca
<Port> 5555 </Port>
<Cell> squareCell </Cell>
</Processor>
</Mapping>
In scenarios two and three, communication bro-
kers add to the communication delays. One broker
ICSOFT 2008 - International Conference on Software and Data Technologies
68
is involved in scenario two but two broker processes
(one on each host) are involved in scenario three.
6.2 Case Two: Infrequent Inter-process
Communications
The test described here is similar to the last three sce-
narios in case one. The only difference is that client-
Cell is replaced with the following code.
client = { p: -sp | x: Integer := 1;
loop
xs: Integer;
if x % 500 = 0 then
p.ask := x;
xs := p.answer;
else xs := x * x; end;
sys.out := text x + "ˆ2=" + text xs +"\n";
--- do more work
j: Integer := 0;
loop while j < 1000000 j += 1; end;
x := x + 1;
if x > 1500 then exit end end };
If the processes run in one memory space, client-
Cell takes
145s
to display all the squares. However, if
the last two configuration files are used for scenario 2
and scenario 3 respectively as in case 1 above, client-
Cell takes roughly
116s
to finish. Tables 1 and 2 give
a summary of the tests in case one and case two re-
spectively.
Table 1: Summary of tests in Case one (Frequent Commu-
nications).
Scenario Execution time
Scenario one 289s
Scenario two 236s
Scenario three 241s
Table 2: Summary of tests in Case two (Infrequent Com-
munications).
Scenario Execution time
Scenario one 145s
Scenario two 116s
Scenario three 116s
7 DISCUSSION
Communication granularity concerns the frequency
and the size of messages sent from one process to
another process within a system. In a system that
uses fine-grained communication, small messages are
sent by processes. This might be reasonable in envi-
ronments where the processors are physically close
to one another (closely coupled environments e.g.
multi-core architectures). In contrast to fine-grained
communication, in a system that uses coarse-grained
communication, few large messages are sent from
one process to another process. This is most useful
in a loosely coupled (processors are physically dis-
persed) distributed environment where processes per-
form large computations and send very few but large
messages.
The approach described in this paper favours com-
munication at any level of granularity. However, pro-
grammers are supposed to match granularity to hard-
ware. Time measurements show that true concurrency
improves performances.
8 RELATED WORK
Communicating Sequential Processes (CSP) is a for-
mal language for specifying concurrent systems. Pro-
cesses in CSP communicate over synchronous chan-
nels (Hoare, 2004). Channel simplifies synchro-
nization of interactions between communicating pro-
cesses. The π-calculus is a model of computation for
communicating systems that have changing structures
(Milner, 1980). This is especially useful for model-
ing systems that may be deployed on many different
platforms. Channels may be sent from one process to
another process to facilitate communication between
processes within a system. Our approach has been
influenced by CSP and π-calculus models.
Actor model (Hewitt, 1976; Hewitt and Baker,
1977) is an early attempt at formalizing concurrent
systems. Here, actor represents the basic construct
of computation. Actors interact by passing messages
over asynchronous channels. An actor include a con-
tinuation in its message if the receiver of the mes-
sage needs to send a reply. The receiver uses the
continuation to direct its reply. SALSA (Varela and
Agha, 2001) is actor-based language for program-
ming dynamically reconfigurable open distributed ap-
plications.
Clear separation of program semantics from its
distribution has never been the main goal of main-
stream languages. Recently, Erlang has become pop-
ular for programming concurrent applications. How-
ever, network transparency in Erlang requires pro-
grammers to address messages to process ids; sub-
stantial code would have to be re-written when hard-
ware environment changes. Mozart/Oz (Roy, 2004)
separates the functionality of a program from its
distribution thereby allowing the same programs to
be executed on different architectures. Following
Mozart/Oz, we believe the approach described thus
SEPARATING PROGRAM SEMANTICS FROM DEPLOYMENT
69

far will facilitate reconfiguration of systems when
hardware environment changes.
9 CONCLUSIONS AND FUTURE
WORK
It has been shown in this paper that a distributed en-
vironment may be more suitable for a system where
processes rarely communicate. Frequent communica-
tions between the participating nodes in a distributed
system may degrade the overall performance of the
entire system. Clear separation of semantics and de-
ployment of a program helps to adapt the program to
different architectures. In practice, this may help to
preserve software investment. As we have seen the
feasibility of our approach, we hope implement other
aspects of the project and conduct further tests on dif-
ferent architectures, including the multi-core architec-
tures.
ACKNOWLEDGEMENTS
We are grateful to the faculty of Engineering and
Computer Science, Concordia University for support-
ing in part the work described in this paper.
REFERENCES
Andrews, R. G. (2000). Foundations of Multithreaded, Par-
allel, and Distributed Programming. Addison-Wesley.
Armstrong, J., Virding, R., Wikstrom, C., and Williams, M.
(2004). Concurrent Programming in ERLANG. Pren-
tice Hall, second edition.
Bagrodia, R. (1989). Synchronization of Asynchronous
Processes in CSP. ACM Transaction on Programming
Languages and Systems, 11(4):585–597.
Bal, H. E., Steiner, J. G., and Tanenbaum, A. S. (1989).
Programming Languages for Distributed Computing
Systems. ACM Computing Surveys, 21(3):261–322.
Barnes, F. and Welch, P. (2003). Prioritized Dynamic Com-
municating and Mobile Processes. IEE Proceedings -
Software, 150(2):121–136.
Barnes, F. R. and Welch, P. H. (2004). Communicating mo-
bile processes. In East, I., Martin, J., Welch, P., Duce,
D., and Green, M., editors, Communicating Process
Architectures, pages 201–218. IOS Press.
Bernstein, A. J. (1980). Output Guards and Non-
determinisn in CSP. ACM Transaction on Program-
ming Languages and Systems, 2(2):234–238.
Brinch Hansen, P. (1987). Joyce - A Programming Lan-
guage for Distributed Systems. Software Practice &
Experience, 17(1):29–50.
Buckley, G. N. and Silberschatz, A. (1983). An Effective
Implememtation for The Generalized Input-Output
Construct of CSP. ACM Transaction on Programming
Languages and Systems, 5(2):223–235.
Dijkstra, E. W. (1968). Cooperating Sequential Pro-
cesses. In Genuys, F., editor, Programming Lan-
guages: NATO Advanced Study Institute, pages 43–
112. Academic Press.
Grogono, P., Lameed, N., and Shearing, B. (2007). Modu-
larity + Concurrency = Manageability. Technical Re-
port TR E–04, Department of Computer Science and
Software Engineering, Concordia University.
Harris, T. and Fraser, K. (2003). Language Support for
Lightweight Transactions. ACM SIGPLAN Notices,
38(11):388–402.
Hewitt, C. (1976). Viewing Control Structures as Pattern of
Passing Messages. Technical Report AIM-410, De-
partment of Artificial Intelligence, MIT.
Hewitt, C. and Baker, H. (1977). Actors and Continuous
Functionals. Technical Report MIT/LCS/TR-194, De-
partment of Artificial Intelligence, MIT.
Hoare, C. A. R. (1978). Communication Sequential Pro-
cesses. Communications of the ACM, 21(8):666–677.
Hoare, C. A. R. (2004). Communicating Sequential Pro-
cesses. Prentice Hall International, third edition.
Lee, E. A. (2006). The Problem With Threads. IEEE Com-
puter, 39(5):33–42.
Milner, R. (1980). A Calculus of Communicating Systems.
Springer.
Olukotun, K. and Hammond, L. (2005). The Future of Mi-
croprocessors. ACM Queue, 3(7):26–34.
Roy, P. V. (2004). General Overview of Mozart/Oz. Slides
for a talk given at the Second International Mozart/Oz
Conference (MOZ 2004).
Salzer, J. H. (1965). M. I. T. Project MAC. Technical
Report MAC-TR-16, Department of Artificial Intel-
ligence, MIT.
Schneider, F. B. (1982). Synchronisation in Distributed Pro-
grams. ACMTransaction on Programming Languages
and Systems, 4(2):125–148.
Silberschatz, A. (1979). Communication and Synchroniza-
tion in Distributed Programs. IEEE Transaction on
Software Engineering, 5(6):542–546.
Sutter, H. (2005a). The Free Lunch Is Over - A
Fundamental Turn Toward Concurrency in Soft-
ware. Dr. Dobb’s Journal, 30(3). Available on-
line at http://www.gotw.ca/publications/concurrency-
ddj.htm.
Sutter, H. (2005b). The Trouble With Locks. Dr. Dobb’s
Journal.
Varela, C. and Agha, G. (2001). Programming Dynamically
Reconfigurable Open Systems with SALSA. ACM
SIG PLAN Notices, 36(12):20–34.
ICSOFT 2008 - International Conference on Software and Data Technologies
70
