
USING A DATAWAREHOUSE TO EXTRACT KNOWLEDGE FROM
ROBOCUP TEAMS
Isabel Gonzalez, Pedro Abreu and Luis Paulo Reis
FEUP - Faculdade de Engenharia da Universidade do Porto
Rua Dr. Roberto Frias, 4200-465 Porto, Portugal
DEI - Departamento de Engenharia Informatica, Rua Dr. Roberto Frias
4200-465 Porto, Portugal
LIACC - Laborat
´
orio de Intelig
ˆ
encia Artificial e Ci
ˆ
encia de Computadores
Rua Dr. Roberto Frias, 4200-465 Porto, Portugal
Keywords:
Knowledge Extraction, DataWarehouse, Game Analysis, Robotic Soccer, RoboCup, Simulation.
Abstract:
RoboCup is a scientific and educational, international project that involves artificial intelligence, robotics
and sport sciences. In these competitions, teams of all around the world participated in distinct leagues. In
the begining of the Coach competition, one of RocoCup leagues,the goal of the researchers was to develop
an agent (Coach that provides advices to teammates about how to act and with improve team performance.
Using the resulting improved coach agent, with enhanced statistic calculation abilities, a huge amount of
statistical data was gathered from the games held at Bremen 2006. This data was then stored and treated
in a data warehouse system obtaining a good high level perspective/knowledge of the RoboCup simulated
soccer tournament. According to the results, the team that represented our country, has a much more goal
opportunities in comparison with the majority of the teams, but this team did not score many goals. In terms
of more occupied regions, the best four teams in the tournament did not occupy many times the left and right
wings, compared to others regions. In the future the our country team needs to develop new strategies that use
these two areas preferrentialy in order to achieve better results.
.
1 INTRODUCTION
RoboCup is a scientific and educational, international
project that involves artificial intelligence, robotics
and sport sciences. The main goal of RoboCup is to
develop a team of fully autonomous humanoid robots
that can defeat the human world champion team in
soccer by 2050.
Since the first official RoboCup games in 1997,
in which over 40 teams participated (real and sim-
ulation combined), there have been lots of other in-
ternational and regional competitions and scientific
conferences, related with it. In these competitions,
teams of all around the world participated in several
distinct leagues and researchers presented scientific
work about their approaches to several sub problems.
Nowadays there are many different leagues
divided into four main classes: RoboCup Soc-
cer, RoboCup Rescue, RoboCup@Home and
RoboCupJunior. In these classes, there are also
several sub leagues. For example in RoboCup
Soccer competitions there are many sub leagues like
Soccer Simulation leagues (2D, 3D and Coach) and
robotic leagues (small-size, middle-size legged and
humanoid). One of the competitions present in the
Soccer simulation leagues is the Coach competition
in which research groups have to develop a Coach
Agent capable of high-level action and intelligent
analysis of the simulated soccer game. In the begin-
ning of this competition, the goal of the researchers
in this league, was to develop an agent (Coach) that
provides advices to teammates about how to act and
with this improve team performance. The commu-
nication system between the coach agent and his
players was supported by a standard coach language
called CLang (Federation, 2007). This language
was developed based on COACH UNILANG (Reis
and Lau, 2002) language created by FC Portugal
in 2001 which enables high-level communication
between a coach agent (or human coach) and a soccer
robotics playing team. Clang started to be a very
simple language but evolved into a very complete
511
Gonzalez I., Abreu P. and Paulo Reis L. (2008).
USING A DATAWAREHOUSE TO EXTRACT KNOWLEDGE FROM ROBOCUP TEAMS.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - DISI, pages 511-514
DOI: 10.5220/0001715405110514
Copyright
c
SciTePress
language for coaching soccer teams, containing most
of the features introduced originally in COACH
UNILANG.
The main goal of the coach competition was
changed after its first four editions (2001-2004) trans-
forming the competition into a game analysis chal-
lenge (Kuhlmann et al., 2005). The league has been
used, since then, to extract usefull information about
the game. In the context of this league, in the past
years, many advances have been made in these re-
search topics: Development of team opponent mod-
els (players individual models and teams collective
models (Kuhlmann et al., 2006); Methodologies for
using Coaching to help teams to improve their per-
formance in the simulated robotic soccer domain (Ri-
ley et al., 2002); Adjustable autonomy in real-world
multi-agent environments (Scerri et al., 2001).
The main goal of this research is to extract the
highest knowledge about the way of playing of the
teams that participated in the 2D simulation league of
RoboCup World Championship 2006 held in Bremen,
Germany. Using the available coach program of FC
Portugal team (team, 2007) as a base, we have imple-
mented new algorithms for calculating several statis-
tics. Using the resulting improved coach agent, with
enhanced statistic calculation abilities, a huge amount
of statistical data was gathered from the games held at
Bremen 2006. This data was then stored and treated in
a data warehouse system obtaining a very good high-
level perspective/knowledge of the RoboCup simu-
lated soccer tournament.
2 PROJECT ARCHITECTURE
In order to achieve the best knowledge of the playing
style of all robotic soccer teams participating in the
last simulation league tournament of RoboCup, this
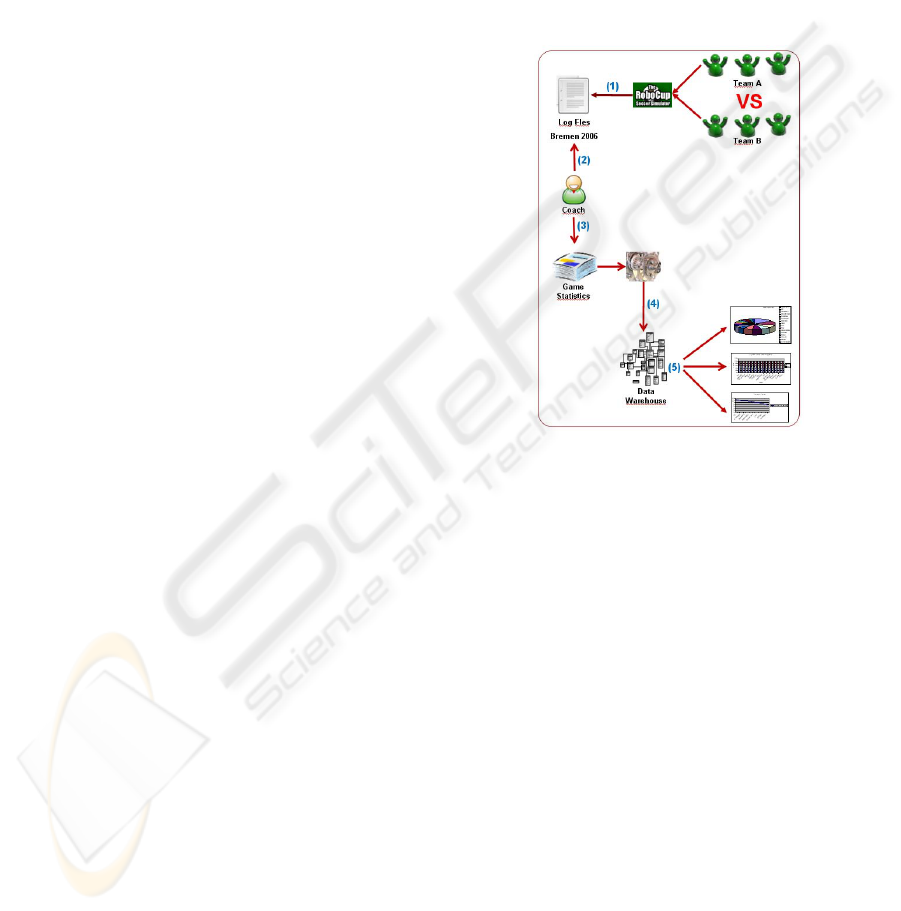
project used the architecture illustrated in figure 1.
In RoboCup 2006, as in others similar tourna-
ments, many teams compete together to achieve the
best result having as main goal, obviously, to win the
competition. In order to start the simulation the play-
ers (agents) need to connect to a server (soccerserver)
and after that the simulation could be started. At
the final of the game, the soccer server generates the
corresponding log file, which characterized the entire
game, including the players and ball positions and
velocities and other relevant information. The first
phase (1) of this project consisted in collecting all log
files from RoboCup 2006 tournament. In the next two
phases (2 and 3), the coach agent (introduced in the
previous section), using the log files then extracts the
maximum information about the game and calculates
different types of statistics e.g. number of successful
passes, number of goals etc. After that, in phase 4, the
Data Warehouse (DW) was created and the statistics,
that were previously calculated, were transformed in
order to be easier to store in the DW. The statistics
were then stored in an appropriate format in the Data
Warehouse. In the final project phase (5), after the
storage of all tournament data in the DW, using SQL
queries, we aimed at extracting all kinds of useful
high-level information about all robotic teams indi-
vidual and collective playing style.
Figure 1: Project’s Architecture.
3 GAME STATISTICS
According to the Coach Competition rules, the coach
has to analyze log files of a given team and discover
its playing pattern. The main challenge is to use the
low-level information contained in the log files (po-
sitions and velocities) to calculate and appropriately
use high-level information of the match. The games
statistics calculated included: passes (and its results),
ball losses and recoveries, game situation occurrences
(corners, free-kicks, among others), goals and scoring
opportunities.
3.1 Field Regions
With the purpose of extracting information about the
places where there is a higher occupation rate for both
teams in a game, we have separated the field in eight
regions: our middle, their middle, our penalty box,
their penalty box, our left wing, their left wing, right
wing and their right wing.
ICEIS 2008 - International Conference on Enterprise Information Systems
512
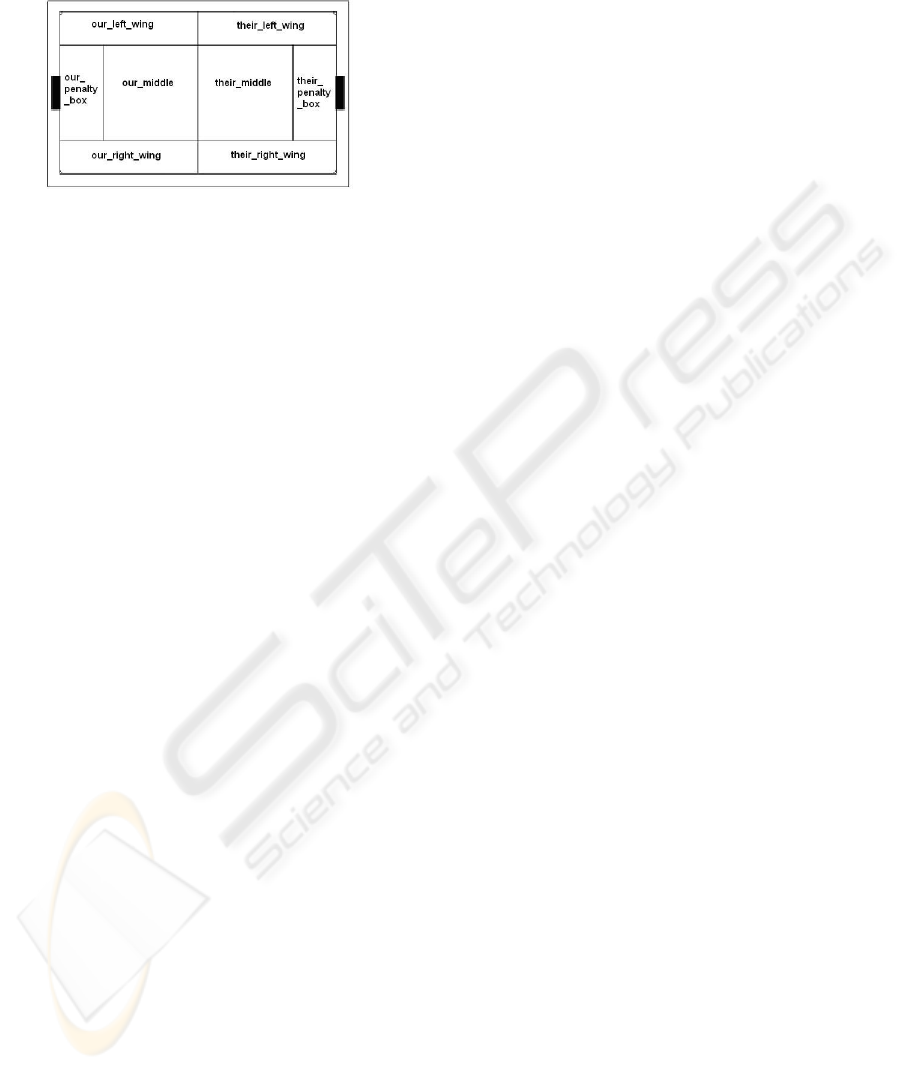
The region delimiters are the following 2 for left team,
and the opposite of right team.
Figure 2: Considered Field Regions.
These regions are built giving the points of a rectan-
gle that defines each region in the field. The results
depend on the team analyzed, the side that team starts
to play and if you are in the first half or the second
half of the game. All these statistics are saved in a
final game file that will be then analyzed.
3.2 Pass Information
A pass may be considered when a player kicks the
ball with enough force in a specific direction, aiming
to a teammate that is supposed to receive the ball.
Regarding passes, the statistics calculated are the
total of passes, the percentage of passes in each part of
the game, the percentage of passes of each team, the
same with each player (passes executed and received),
the percentage of successful passes in each part of the
game of each team. Pass statistical information is also
calculated by each field region.
3.3 Ball Recoveries and Losses
A ball recovery occurs when a player from the team
has the ball possession in a given cycle (e.g. may kick
the ball) and he losses the ball possession for a mem-
ber of the opponent team (a player from the opponent
team may kick the ball). This statistic is the opposite
of a ball recovery. When a team is able to do a ball
recovery, the other team looses the ball possession.
Regarding this statistic, the system calculates the
total of ball recoveries and losses, the percentage of
recoveries and losses in each part of the game, the
percentage of recoveries and losses of each team, the
same with each part of the game. Statistics are also
calculated by each field region.
3.4 Game Occurrences
This game parameter summarizes the occurrences
that happened in the game. These occurrences can
be free kicks (right or left), goals (right or left), off-
sides, corners, etc. In this situation we calculate the
total occurrences, the percentages of each occurrence
and the percentage of occurrences in each region.
3.5 Goal Scoring and Opportunities
A goal scoring opportunity occurs when an attacking
player has the ball possession in a dangerous area.
Dangerous area is a subjective concept that we esti-
mate as a region sufficiently near the opponents goal
that a shoot may be successful. In this statistic cal-
culation we estimated the total of goal opportunities,
the percentage of opportunities in each part of the
game, the percentage of opportunities of each team
and player and the same with the halfs of the game.
Besides this, it is also calculated the percentage that
each region is visited when there is an opportunity.
4 DATA WAREHOUSE
In order to get information about statistics, the final
game file was split into several different files, one for
each type of statistic. In each file the data was sep-
arated by tabs considering the future storage a data
warehouse. Although it could be a good choice, XML
is not being considered as a storage format because it
implies defining a schema and then validating each
file with this schema and, in the process of storage,
its use would decrease the performance of all process
comparing with the tabs separation method.
The reason for using a data warehouse instead of
a conventional database is mainly because, in this
project, the goal was to collect a higher number of
files at once and after that do some interrogations
in the data warehouse. The performance of the data
warehouse in terms of time delay is also critical so
the data warehouse seems the best option in this case.
In order to represent most of the interesting soccer re-
lated statistics the following data warehouse was been
defined.
In this structure three distinct dimensions were de-
fined: Participation, Game Summary and Classifica-
tion. The Participation is the dimension that had all
information about the participants of the game like
referee, trainer and player, filtered by data and league.
The Game Summary dimension is referred to all game
statistics calculated per team like the number of at-
tacks, number of assists, ball recovery among others.
Finally, the Classification dimension has information
about the final results that teams achieve in a spe-
cific competition. In this project only the game sum-
mary dimension have been used mainly to simplify
USING A DATAWAREHOUSE TO EXTRACT KNOWLEDGE FROM ROBOCUP TEAMS
513

the analysis that would be confusing using all kinds
of data for all dimensions, for all the teams.
5 RESULTS AND DISCUSSION
For a better understanding this section is divided in
three parts.
5.1 Goal Opportunities
Doing a comparison between the number of goals
scored and the percentage of goal opportunities the
Ri-one team was the team with the best performance.
This team achieved more than thirty-five goals with
only four percent of the total goal opportunities. In
the opposite side teams like FC Portugal needed seven
percent of goal opportunities to scored only four
goals. Analyzing the games it is easy to see that Ri-
One team had a simple attacking behavior, based on a
long pass to the team forwards that resulted in a sim-
ple goal against most of the teams.
5.2 Successful Passes
This statistic of the game must be improved for all
the teams in the near future. The values in it were
between eight to thirteen percent which is a very
low value compared, for example, with real football.
Teams use a very fast but not so safe playing style,
resulting in lots of ball losses when executing passes.
5.3 Regions Visited by the Best Teams
in the Tournament
The area of the field more occupied by these teams
were the two midfields area (our and their). Pecu-
liar is the behavior of the Ri-one team, which occu-
pied the penalties boxes areas rarely (compares with
other field area). Other interesting observation was
the behavior of the Wright Eagle (WE) team, which
occupied the opponent left wing area less than one
percentage of their total
6 CONCLUSIONS AND FUTURE
WORK
This paper describes an approach to the use of a
data warehouse to extract knowledge from RoboCup
teams playing style. The transformations and data ex-
traction were developed in a very easy way by us-
ing the data warehouse, enabling to use the results
achieved to get information about the teams and their
playing style. With these results we concluded that
teams like TokyoTech or FC Portugal needed many
opportunities to score a goal in contrast with Ri-one
that scored most of their opportunities. An interesting
observation is that FC Portugal team has much more
goal opportunities in comparison with other teams,
but this team did not score many goals. So, this seems
like a parameter to improve in a near future by the FC
Portugal team, for example, shooting more to the goal
or developing simple but effective moves in the oppo-
nents area, to score goals.
The next developments in this project shall focus
two distinct areas. In the future the data warehouse
will have data not only from RoboCup 2006 Compe-
tition but also from previous tournaments. This point
will improve the knowledge about all the participating
teams, which will also enable to raise the performance
of a given Team in a near future. This point could also
allow to store a higher amount of data throw the use
of the developed data warehouse.
The other area of work, regards the implementa-
tion of new types of statistics in order to better char-
acterize the game.
REFERENCES
Federation, R. (2007). Clang: The robocup
coach language. In Avaiable online at
http://www.cs.utexas.edu/ ywwong/wasp/robocup-
clang.html.
Kuhlmann, G., Knox, W., and Stone, P. (2006). Know
thine enemy: A champion robocup coach agent. pages
1463–1468.
Kuhlmann, G., Stone, P., and Lallinger, J. (2005). The ut
austin villa 2003 champion simulator coach: A ma-
chine learning approach. pages 636–644. Springer
Berlin / Heidelberg. ISBN 978-3-540-25046-3.
Reis, L. and Lau, N. (2002). Coach unilang a standard
language for coaching a (robo) soccer team. Lecture
Notes in Computer Science, Volume 2377, pages 183–
192. Springer-Verlag, Berlin. ISBN 3-540-43912-9.
Riley, P., Veloso, M., and Kaminka, G. (2002). An empirical
study of coaching. pages 215–224. Springer-Verlag.
Scerri, P., Pynadath, D., and Tambe, M. (2001). Adjustable
autonomy in real-world multi-agent environments. in
agents. pages 107–116. ISBN 978-1-57735-131-3.
team, F. P. (2007). Fc portugal team oficial site. In Avaiable
online at http://www.ieeta.pt/robocup/.
ICEIS 2008 - International Conference on Enterprise Information Systems
514
