
COMPARING COLOR AND TEXTURE-BASED ALGORITHMS FOR
HUMAN SKIN DETECTION
A. Conci, E. Nunes
Instituto de Computac¸˜ao, Universidade Federal Fluminense, Niter´oi, Brazil
J. J. Pantrigo, A. S´anchez
Departamento de Ciencias de la Computaci´on, Universidad Rey Juan Carlos, 28933 Madrid, Spain
Keywords:
Skin detection, segmentation, pixel classification, color spaces, texture.
Abstract:
Locating skin pixels in images or video sequences where people appear has many applications, specially those
related to Human-Computer Interaction. Most work on skin detection is based on modelling the skin on
different color spaces. This paper explores the use of texture as a descriptor for the extraction of skin pixels
in images. For this aim, we analyzed and compared a proposed color-based skin detection algorithm (using
RGB, HSV and YCbCr representation spaces) with a texture-based skin detection algorithm which uses a
measure called Spectral Variation Coefficient (SVC) to evaluate region features. We showed the usefulness of
each skin segmentation feature (color versus texture) under different experiments that compared the accuracy
of both approaches (i.e. color and texture) under the same set of hand segmented images.
1 INTRODUCTION
Skin segmentation has many important applications
related to finding and analyzing people behaviour on
images or video sequences. Some of these appli-
cations are visual tracking for surveillance, face de-
tection, hand gesture recognition, searching and fil-
tering image contents on the web, and many oth-
ers. In the case of Intelligent Human-Computer In-
teraction (IHCI), the capture and interpretation of the
user’s motions and emotions is an important element
to understand of his/her current cognitive state (Duric
et al., 2002). This way the interface can interactively
adapt to the user. To achieve this goal, the detection
of people in a video sequence through the skin color
usually becomes a crucial preprocessing for tracking
their movements, gestures and facial expressions.
This segmentation problem is stated as classify-
ing the pixels of an input image in two groups: skin
and non-skin pixels. An important requirement for
automatic (or semiautomatic) skin detection systems
is a trade off between correct classification rate and
response time. The common approach to skin de-
tection is using the skin color as feature. Different
color spaces and skin-color classifiers have been re-
ported in the literature (Phung et al., 2005). For mod-
elling the skin color, most authors mainly use three
types of color representationspaces (Kakumanu et al.,
2007): basic, perceptual and orthogonal spaces. The
first group corresponds to most common used for-
mat to represent and store digital image, and it in-
cludes spaces like RGB or normalized RGB. The sec-
ond group separates perceptual characteristics of the
colors (such as hue, saturation and intensity). These
characteristics are mixed in RGB, and this second
group includes spaces like HSV, TSL or HSI. The last
group reduces the redundancy in RGB channels by
representing the color with statistically independent
components, and it includes spaces like YCbCr or
YIQ. Among the skin classification techniques, some
representative works use thresholds and histogram-
based algorithms (Zarit et al., 1999), simple Gaussian
and Gaussian mixture models (Terrillon et al., 2000),
Bayes classifier (Jones and Rehg, 1999), fuzzy meth-
ods (Soria-Frisch et al., 2007), and so on. However,
skin color detection presents several important prob-
lems under uncontrolled conditions: it is affected by
the illumination, it can be confused in different color
spaces with the color of metal or wood surfaces and
also skin color can change from a person to another
(even with people of the same ethnicity).
Texture is another important feature on image seg-
166
Conci A., Nunes E., Pantrigo J. and Sánchez A. (2008).
COMPARING COLOR AND TEXTURE-BASED ALGORITHMS FOR HUMAN SKIN DETECTION.
In Proceedings of the Tenth International Conference on Enterprise Information Systems - HCI, pages 166-173
DOI: 10.5220/0001685401660173
Copyright
c
SciTePress

mentation which, different of color, has been rarely
used for skin classification. Texture-based segmenta-
tion takes into account the positional relations among
pixels in a region of the image. It considers not only
one pixel but its behaviour in a region that is named
as texel. Since the color skin segmentation can be
perturbed by the mentioned conditions, we have con-
sidered in this work comparing it with texture as a
complementary feature.
This paper aims to systematically analyze dif-
ferent color and texture-based skin-detection meth-
ods. The comparison is performed both visually and
quantitatively (using False Positive and False Nega-
tive classification error rates) for the same set of im-
ages. For the color-based skin detection approach, we
use three common spaces (one for each of the men-
tioned types of color representations): RGB, HSV
and YCbCr, respectively. We have used a simple
pixel rule-based for the RGB space, and have pro-
posed a new region-growing algorithm for skin de-
tection which can be similarly employed in the HSV
and YCbCr. For the texture-based skin detection
approach, the Spectral Variation Coefficient (SVC)
(Nunes and Conci, 2007) is applied to estimate skin
region features. Both approaches (color and texture-
based skin-detection) are computationally efficient
and suited for real time applications.
The rest of the paper is organized as follows. Sec-
tion 2 describes the elements involved in the color-
based skin detection methods, as well as a global
pseudo code of the approach. Section 3 describes a
similar presentation for the texture-based approach.
Experimental results for color and texture-based skin
detection methods are presented and compared in
Section 4. Main conclusions and future work are out-
lined in Section 5.
2 COLOR-BASED SKIN
SEGMENTATION
As the human skin seems to have a characteristic
range of color, many skin detection approaches are
based on classifying pixels using their color (Forsyth
and Ponce, 2003). A wide set of color spaces
have been considered to model the skin chrominance
(Vezhnevets et al., 2003)(Kakumanu et al., 2007).
However, according to (Albiol et al., 2001): “for all
color spaces their correspondingoptimum skin detec-
tors have the same performance since the separability
in skin or not skin classes is independent of the color
space chosen”. In other words, the quality of a skin
detection method is more dependent on the proposed
detection algorithm and less on the used color space.
In this section, in order to investigate this state-
ment, three color spaces are used to represent the hu-
man skin: RGB, HSV and YCbCr. For the case of
basic RGB space, we applied the following simple
explicit skin detection algorithm that can be found in
(Kovac et al., 2003) and works on all the image pixels
for uniform daylight illumination:
(R > 95) ∧ (G > 40) ∧ (B > 20)∧
(max(R, G, B) − min(R, G, B) > 15)∧
(|R− G| > 15) ∧ (R > G) ∧ (R > B)
(1)
where R, G and B represent the value of pixel in the
respective RGB color channel with values ranging
from 0 to 255. For HSV and YCbCr spaces, a sim-
ilar approach is followed. We retain luminance infor-
mation by converting the image to gray levels. Next,
we produce an initial oversegmentedimage of regions
by applying a morphological watershed method. For
each of the produced watershed regions their corre-
sponding color histograms for each of the three chan-
nels (in HSV or YCbCr spaces) are computed and
compared using the Battachariyya distance (Kailath,
1967) to those corresponding to previously trained
skin histograms. If these histograms are similar, the
region is considered as “skin region” and used as seed
for a region growing algorithm applied on neighbour
non-skin regions. Finally, the explicit skin detection
algorithm in Fig. 1 is applied to each pixel of de-
tected skin regions to discard False Positive (FP) skin
regions when the percentage of skin pixels in a region
is above an experimental threshold. The global pro-
posed color based skin detection method is outlined
by the pseudo code shown in Fig. 1. Some important
remarks on this algorithm are the following ones.
• To recognize the skin pixels in images, we per-
formed a training stage on the system. For this
task, we obtained different skins histograms using
a set of images where 2,314 skin fragments were
manually extracted (i.e. only skin pixels were
considered). A histogram was created for each
of the three channels in each considered color
space (RGB, HSV and YCbCr, respectively) and
its number of histogram bins was set to 10.
• The Battacharyya distance (Kailath, 1967) was
used to compare the three channel histograms
in a given color space of a test region with the
corresponding ones of trained skin regions his-
tograms to decide if a region can be considered
or not as skin region. This distance measures
the similarity of two discrete probability distribu-
tions. Given the probability distributions obtained
from the corresponding histogram vectors, p and
q respectively, over the same domain X, the Bat-
tachariyya coefficient BC is defined as:
COMPARING COLOR AND TEXTURE-BASED ALGORITHMS FOR HUMAN SKIN DETECTION
167
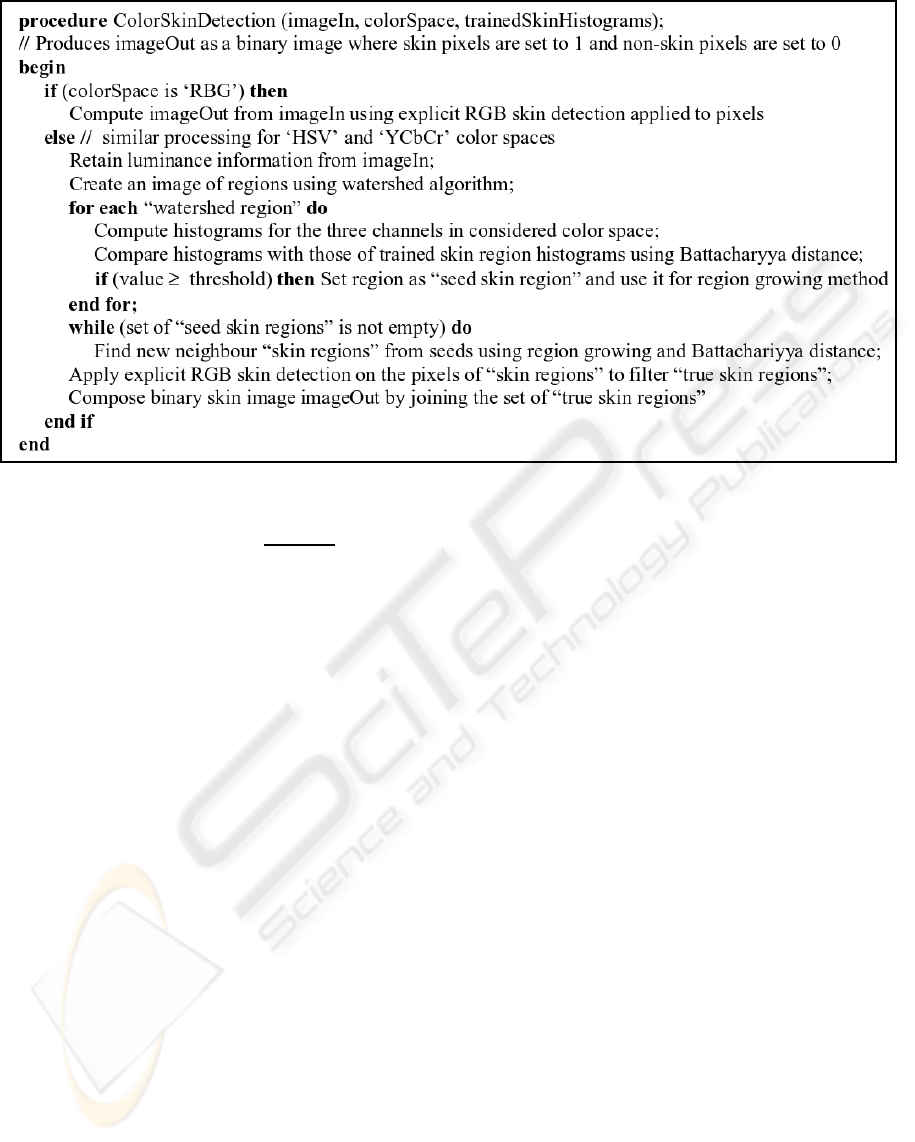
Figure 1: Pseudo code for the global proposed color based skin detection method.
BC(p, q)=
∑
x∈X
p(x)q(x) (2)
where this coefficient represents a value between
0 and 1, and the value BC=1 means the highest
degree of similarity between both histograms.
3 TEXTURE-BASED SKIN
SEGMENTATION
Many texture classification schemes have been used
for grey level images. Texture image segmentation is
common in analysis of medical images, remote sens-
ing scene interpretation, industrial quality control in-
spection, document segmentation, image recovery in
databases, visual recognition systems, etc.
In this paper, we use a segmentation method that
considers the RGB channels or other color spaces
combinations. It also permits the distinction among
different color and texture combinations in the same
image. It is based on the Spectral Variation Coeffi-
cient (Nunes and Conci, 2007) to evaluate region fea-
tures (it can be used for very small to very large re-
gions) and it permits to obtain correct real-time tex-
ture boundaries. It also allows distinguishing among
different textures with few changes on the same type
of patterns. The positional relation among the pix-
els on the texel (or texture element) are considered.
The channels of the color information for each pixel
are combined in a new way by considering their mean
and standard deviation. This scheme is computation-
ally very efficient and it is suitable for real-time ap-
plications that combine color and texture. It can be
used for all type of texture because the texture rules
of what will be identified are completely given by the
used seed and are adapted to each situation. Addition-
ally, the k-means clustering technique is used to seg-
ment the regions according the SVC value for each
texel band.
The first step in the calculation of the SVC for
each texel is combining the information of the three
original image color channels. The texel size is de-
fined by the user or by the application. In our im-
plementation it must have square shape, with M × M
pixels, ranging from M = 3 to 21 and using odd M
values (that is 3×3, 5×5,...,21×21). To show how
the channel combination is performed, let us use a nu-
merical example. Consider the 7×7 texel on Fig. 2.a,
represented by their intensity values for each pixel in
channels R, G and B (see Figs. 2.b, 2.c and 2.d, re-
spectively).
To achieve a better characterization of the texture
variations in the texel, considering also the channel
order, the value of the pixel intensity of each channel
(R, G or B) is substituted by a new value considering
the others two channels, as shown in Fig. 3 (i.e. for
the first position of the matrix). Considering the data
of Fig. 2.b, the value 175 of the intensity of the first
pixel in the channel R, will be changed by the result of
a computation (illustrated by Fig. 3) which considers
itself and the intensities of the other G and B channels
(168 and 143, respectively). The new computed value
ICEIS 2008 - International Conference on Enterprise Information Systems
168
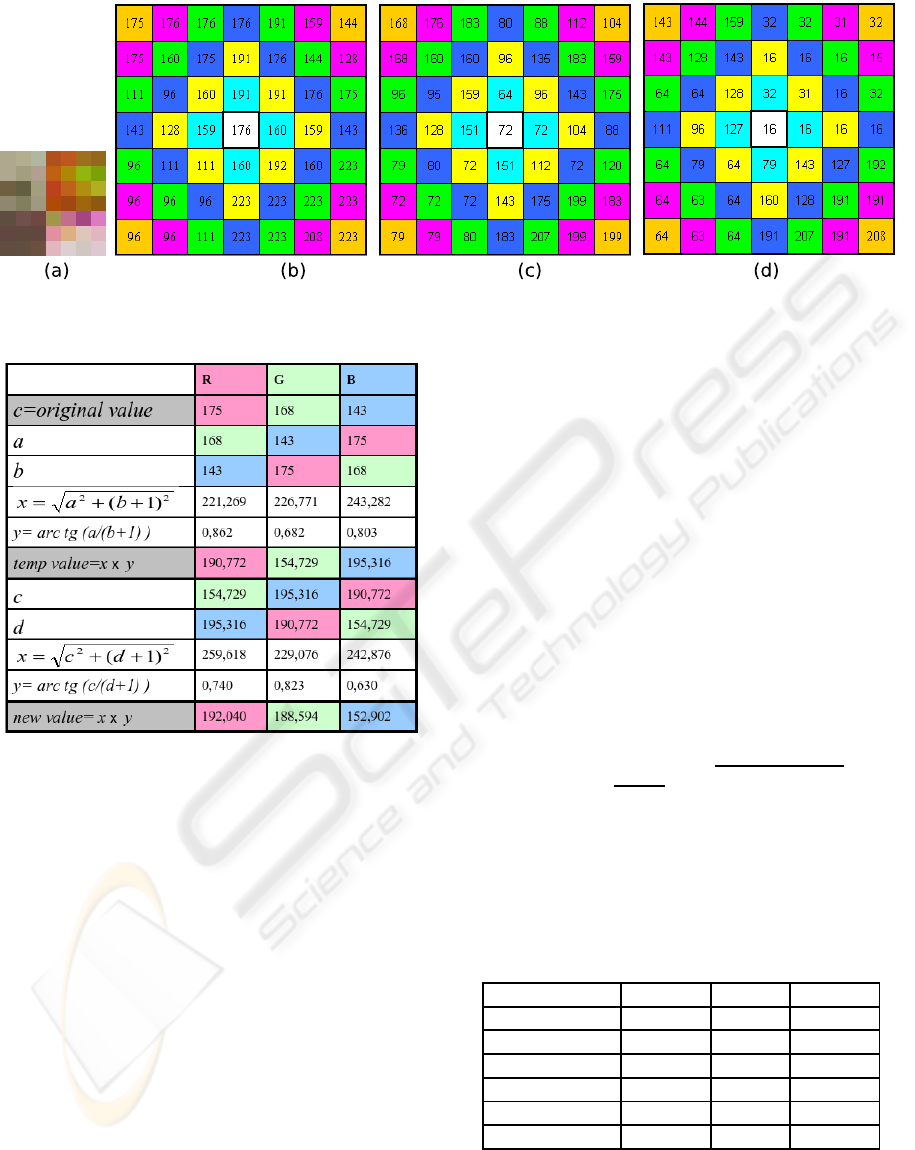
Figure 2: A 7×7 sample texel: (a) how it is originally seen by human eyes, (b) pixel intensities for Red, (c) Green and (d)
Blue channels, respectively.
Figure 3: Computed blended intensities in the R, G and B
channels for a sample pixel.
will be 192,040.
The same procedure will be carried out for all
pixels of the input image by substituting the original
pixel intensity for its new computed blended channel
value. This procedure was adopted, aiming distinc-
tion of the different combinations and order of each
RGB channel in the texture on analysis.
The second step in the calculation of the SVC is to
determine the average and the standard deviation val-
ues for each class of distances considering the used
metric in the texel on analysis using the blended val-
ues. In this example of SVC computation, we are us-
ing the D
4
metric, also known as Manhattan or city
block distance (Sonka et al., 1999), to classify each
pixel in the texel based on its distance to the central
position. However, any other metric can be used in the
implementation of the SVC procedure. Letting q(s, t)
and p(x, y) be pixels on the (s,t) and (x, y) positions
respectively, then D
4
(p, q) is defined as:
D
4
(p, q)=|x− s| + |y− t| (3)
To exemplify the calculation, consider the six im-
ages in Fig. 4 that illustrate the levels of intensity of
one of the 3 channels after blending (R for instance)
foratexelof7×7 pixels, where each classes at differ-
ent D
4
distance are represented in differentcolor (here
are represented values of distance from 1 to 6). The
number of D
4
distance classes under consideration is,
of course, related to the texel size.
Finally, the SVC combines information from the
spatial position of the pixels in the texture element
(using the Fig. 4 distance classes) for each channel
blended values through the mean md and the standard
deviation sd inside each class of distances, thus ob-
taining:
SVC = arctg(
md
sd + 1
) ×
md
2
+(sd + 1)
2
(4)
By continuing with the example and using the Fig-
ure 4 values, the SVC for each distance class associ-
ated with the R channel is computed and shown in
Table 1.
Table 1: SVC computation for each distance class by con-
sidering the values of Figure 4.
Distance class md sd+1 SVC
1 195,783 29,203 281,627
2 195,205 40,312 272,505
3 187,198 44,971 257,026
4 184,846 49,282 250,654
5 182,863 49,760 247,336
6 182,380 49,973 246,467
The value of SVC for the Red channel SVC
R
, cor-
responding to the sample pixel, is computed using the
values of Table 1 and eq. 4, and SVC
R
=393,575. The
SVC of the texel is also computed for the other G
COMPARING COLOR AND TEXTURE-BASED ALGORITHMS FOR HUMAN SKIN DETECTION
169
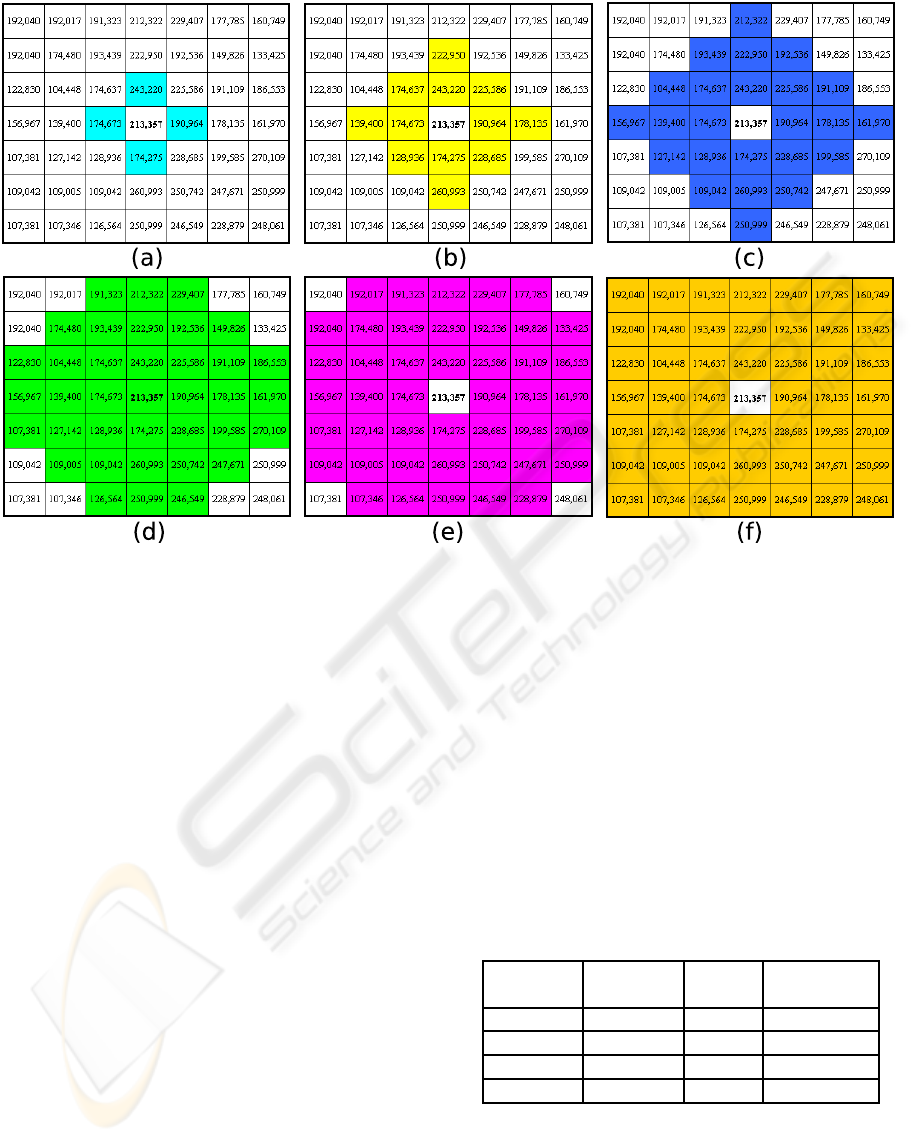
Figure 4: Six groups of pixels corresponding to the D4 metric distance classes on a 7×7 texel on analysis: a) D
4
≤ 1, b)
D
4
≤ 2, c) D
4
≤ 3, d) D
4
≤ 4, e) D
4
≤ 5 and f) D
4
≤ 6.
and B blended channels (in the same way as for the
R channel). This procedure can be adapted for other
types of multichannel (or multiband) images. The
value of the SVC in each channel of the color space
defines a coordinate in the Euclidean space for the
considered texel, characterizing a point in the three-
dimensional space. Then, the samples of the train-
ing set are grouped using the k-means clustering al-
gorithm. The representative element of each cluster is
its centroid, which has an average value for the SVC
considered in each channel or band, relative to all the
samples of the corresponding cluster. From an initial
estimation of the coordinates of the centroids, the al-
gorithm computes the distance of each sample of the
set of training skin centroids. This way, a region is
considered as “skin region” and used as seed for a
region growing algorithm applied on neighbour non-
skin regions if it is close to trained skin centroids. The
proposed SVC-based algorithm for skin detection in
the RGB color space for each texture region texelIn
is outlined by the pseudo code shown in Fig 5.
4 EXPERIMENTAL RESULTS
Initially, we tried to use the Compaq database (Jones
and Rehg, 1999) for experiments. However, we visu-
ally checked that in many images of this database the
manual skin segmentation was not correct. Therefore,
our proposed color and texture approaches have been
tested using other four color real images (shown by
Fig. 6) where the skin was hand segmented. For each
of these images, the corresponding number of pixels
and percentages of skin and non-skinpixels are shown
in Table 2. To compare the accuracy of proposedcolor
and texture segmentation method for skin segmenta-
tion, a comparison of the corresponding classification
errors, False Positives (FP) and False Negatives (FN),
is presented.
Table 2: Some properties of the test images.
Image Size % skin % non-skin
(# pixels) pixels pixels
Javi 540,870 28.71 71.29
photo 307,200 30.42 69.58
Beckham 155,000 6.67 93.33
CSainz 145,700 11.24 88.76
Some experiments were performed to compare
the color and texture-based skin classification ap-
proaches. First, we analyzed and compared the effect
of the tested color spaces (RGB, HSV and YCbCr, re-
spectively) in skin classification using the algorithm
presented in Section 2. This algorithm requires from
ICEIS 2008 - International Conference on Enterprise Information Systems
170
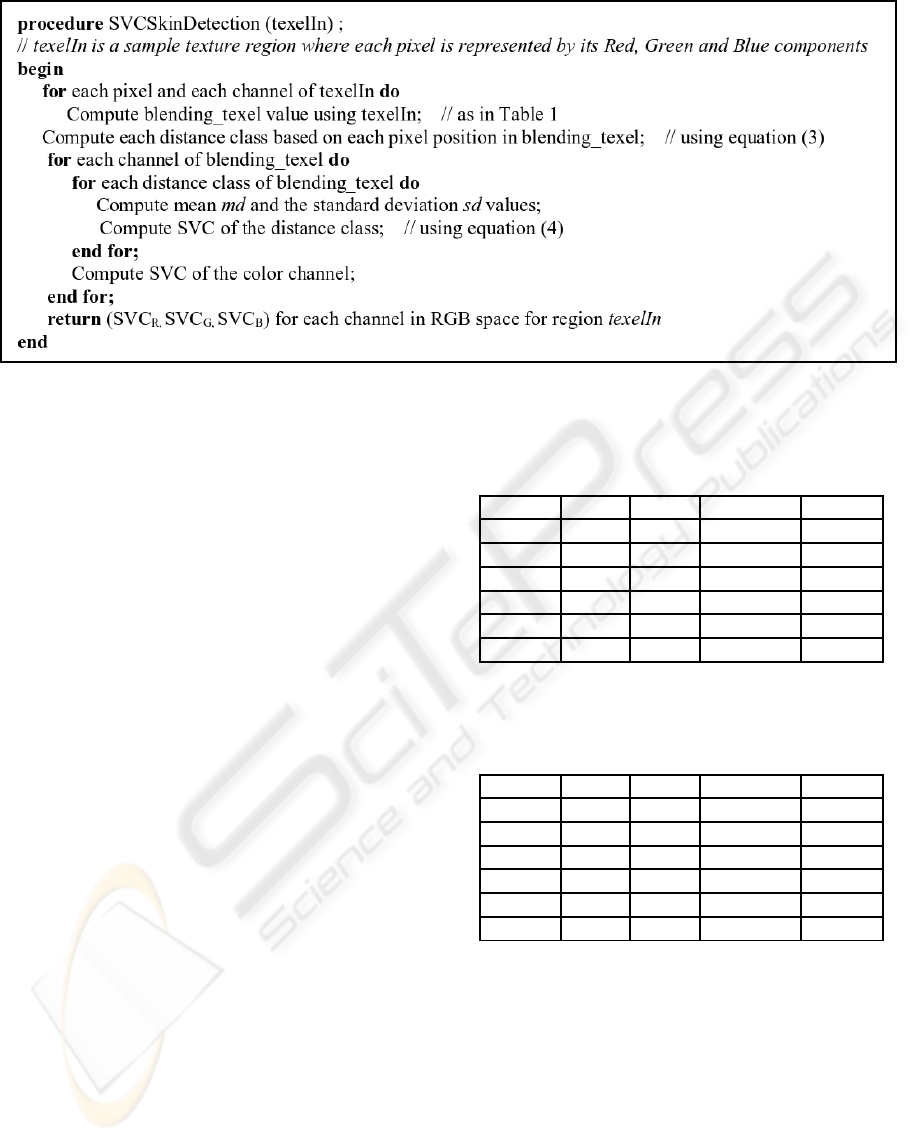
Figure 5: Pseudo code for the SVC-based skin detection method for each texture region texelIn.
three threshold parameters: thRegion that represents
the percentage of pixels for a region to be consid-
ered as “skin region” according to Battacharyya dis-
tance, thNeighbour is the percentage of pixels for a
neighbour of a “skin region” to be a new “skin re-
gion”, and thRGB that represents the percentage of
skin pixels using eq. 1 in a region to be finally la-
belled as “skin region”. After some experimenta-
tion, we concluded that good parameter values were:
[thRegion,thNeighbour,thRGB]=[0.4,0.1, 0.5]. Fig-
ure 7 visually compares the segmentation results ob-
tained by the color segmentation algorithm in the con-
sidered color spaces for these parameter values us-
ing ”CSainz” image. The result of the texture-based
algorithm for the same test image is also shown in
Figure 7. In general, the HSV color space produced
better detection results that the other two used color
spaces. Consequently, we have quantitatively com-
pared the FP and FP errors produced by our color
algorithm in the HSV space with the corresponding
ones produced by the texture segmentation method
for the four test images. The corresponding results
are presented in Tables 3 and 4, respectively. Table
3 corresponds to the results for the HSV color-based
skin detection algorithm and Table 4 is referred to the
results for the SVC texture-based skin segmentation
algorithm. Both tables show the percentages of cor-
rectly detected skin pixels (the sum of percentages of
TP and TN) and incorrectly detected skin pixels (the
sum of percentages of FP and FN) for each respective
algorithm and test image.
Some conclusions can be extracted from the ex-
periments:
• For the considered test images the skin detection
color-based methods reduce in average a 22.4 %
the False Positive (FP) error rate. This is mainly
Table 3: Results for the HSV skin detection
color-based algorithm (where parameter values are
[thRegion,thNeighbour,thRGB]=[0.4, 0.1, 0.5]).
Image Javi photo Beckham CSainz
%TP 27.92 29.61 3.57 6.72
%TN 70.16 68.38 93.12 84.78
%FP 1.13 1.20 0.21 3.98
%FN 0.79 0.81 3.10 4.52
% Suc. 98.08 97.99 96.69 91.50
% Err. 1.92 2.01 3.31 8.50
Table 4: Results for the skin detection SVC texture-based
algorithm (the number of classes in the application of the
k-means algorithm varies between 5 and 10 in the experi-
ments).
Image Javi photo Beckham CSainz
%TP 28.53 29.45 6.03 7.83
%TN 69.31 68.48 89.57 87.20
%FP 1.98 1.10 3.76 1.56
%FN 0.18 0.97 0.64 3.41
% Suc. 97.84 97.93 95.60 95.03
% Err. 2.16 2.07 4.40 4.97
due to the final non-skin regions elimination step,
which discards some formerly labelled skin re-
gions, using an explicit pixel-based RGB skin de-
tection method. In this way, initial skin regions
where the percentage of skin pixels is above an
experimental threshold are now labelled as “non-
skin” regions.
• For the considered test images the skin detection
texture-based methods reduce in average a 43.6%
the False Negative (FN) error rate. This, in fact,
is greatly dependent of the content of the image.
Skin textures are mainly smooth surfaces. If this
COMPARING COLOR AND TEXTURE-BASED ALGORITHMS FOR HUMAN SKIN DETECTION
171

Figure 6: Considered test images: (a) Javi, (b) photo, (c) Beckham, and (d) CSainz.
Figure 7: Visual results of detected skin for the three color space algorithms and the texture approach: (a) hand segmented
skin, (b) RGB, (c) HSV, (d) YcbCr and (e) SVC texture.
same kind of texture can be found on other sur-
face of the analyzed picture, the SVC-based al-
gorithm possibly classify this texture as skin (see
Fig. 7(e)).
• By considering both FP and FN error rates, the
skin detection texture-based approach reduces in
average a 13.6% the misclassified skin pixels with
respect to the color-based approach (a 3.93% in
of errors in the color-based approaches versus a
3.4% in the texture-based method).
• The contour of region boundaries are also more
properly identified using the texture-based algo-
rithm.
5 CONCLUSIONS
This paper presented and compared both a color-
based algorithm (using RGB, HSV and YCbCr repre-
sentation spaces) and a texture-based algorithm (us-
ing the Spectral Variation Coefficient) for skin detec-
tion on color images. Although, most work on skin
detection is based on modelling the skin on different
color spaces, we have proposed the use of texture as a
descriptor for the extraction of skin pixels in images.
The accuracy provided by each segmentation feature-
based algorithm (color versus texture) is shown under
different hand-segmented images. The skin detection
texture-based approach reduces in average a 13.6%
the misclassified skin pixels with respect to the color-
based approach for the considered test images.
Future work is necessary to validate the proposed
algorithms using a standard skin database like the
ECU dataset (Phung et al., 2005). This will permit
to compare our skin recognition results with those
presented by other authors for the same test images.
Another improvement will consist in adapting these
algorithms to detect skin in African or Asian people
images (not only white Caucasian).
ACKNOWLEDGEMENTS
The first author thanks to Project CNPq, No.
201542/2007/2 - ESN /CA-EM. This research was
also partially supported by the Spanish Ministry of
Education and Science Project no. TIN2005-08943-
C02-02 (2005-2008).
REFERENCES
Albiol, A., Torres, L., and Delp, E. (2001). Optimum color
spaces for skin detection. In IEEE Int. Conf. on Image
Processing, volume 1.
Duric, Z., Gray, W., Heishman, R., Li, F., Rosenfeld,
A., Schoelles, M., Schunn, C., and Wechsler, H.
(2002). Integrating perceptual and cognitive modeling
for adaptive and intelligent human-computer interac-
tion. In Proceedings of the IEEE, volume 90.
Forsyth, D. and Ponce, J. (2003). Computer Vision: A Mod-
ern Approach. Pearson, 1st edition.
Jones, M. and Rehg, J. (1999). Statistical color models with
application to skin detection. In Proc. CVPR99.
Kailath, T. (1967). The divergence and Bhattacharyya dis-
tance measures in signal selection. IEEE Trans. on
Comm. Tech., 15:52–60.
ICEIS 2008 - International Conference on Enterprise Information Systems
172

Kakumanu, P., Makrogiannis, S., and Bourbakis, N. (2007).
A survey of skin-color modeling and detection meth-
ods. Pattern Recognition, 40:1106–1122.
Kovac, P., Peer, P., and Solina, F. (2003). Human skin
colour clustering for face detection. In EUROCON
2003.
Nunes, E. and Conci, A. (2007). Segmentac¸˜ao por textura e
localizac¸˜ao do contorno de regi˜oes em imagens multi-
bandas (in Portuguese). IEEE Latin America Transac-
tions, 5(3):185–192.
Phung, S., Bouzerdoum, A., and Chai, D. (2005). Skin
segmentation using color pixel classification: Analy-
sis and comparison. IEEE Trans. on Pattern Analysis
and Machine Intelligence, 27(1):148–154.
Sonka, M., Hlavac, V., and Boyle, R. (1999). Image
Processing, Analysis, and Machine Vision. PWS Pub-
lishing, 2nd edition.
Soria-Frisch, A., Verschae, R., and Olano, A. (2007). Fuzzy
fusion for skin detection. Fuzzy Sets and Systems,
158:325–336.
Terrillon, J., Shirazi, M., Fukamachi, H., and Akamatsu,
S. (2000). Comparative performance of different skin
chrominance models and chrominance spaces for the
automatic detection of human faces in color images.
In Proceedings of the IEEE International Conference
on Automatic Face and Gesture Recognition.
Vezhnevets, V., Sazonov, V., and Andreeva, A. (2003). A
survey on pixel-based skin color detection techniques.
In Proc. GRAPHICON03.
Zarit, B., Super, J., and Quek, F. (1999). Comparison of
five color models in skin pixel classification. In Proc.
ICCV99.
COMPARING COLOR AND TEXTURE-BASED ALGORITHMS FOR HUMAN SKIN DETECTION
173
