
WHAT’S THE BEST ROLE FOR A ROBOT?
Cybernetic Models of Existing and Proposed Human-Robot Interaction Structures
Victoria Groom
Department of Communication, Stanford University, 450 Serra Mall, Stanford, U.S.A.
Keywords: Cybernetics, human-robot interaction, robot teams, social robotics.
Abstract: Robots intended for human-robot interaction are currently designed to fill simple roles, such as task
completer or tool. The design emphasis remains on the robot and not the interaction, as designers have
failed to recognize the influence of robots on human behavior. Cybernetic models are used to critique
existing models and provide revised models of interaction that delineate the paths of social feedback
generated by the robot. Proposed robot roles are modeled and evaluated. Features that need to be developed
for robots to succeed in these roles are identified and the challenges of developing these features are
discussed.
1 INTRODUCTION
Human-robot interaction (HRI) is the study of
humans’ interactions with robots. While the field of
robotics focuses primarily on the technological
development of robots, HRI focuses not just on the
robot, but on the broader experience of a single or
group of humans interacting with robots.
Researchers have long sought to deploy robots
alongside humans as human-like partners,
minimizing humans’ involvement in dangerous or
dull tasks. While robots have demonstrated some
promise as coordination partners, in practice they
contribute little to achieving humans’ goals, often
requiring more attention and maintenance and
eliciting more frustration than their contributions are
worth. Through these failures, it has become clear
that not only must robots’ technical abilities be
improved; so must their abilities to interact with
humans.
Humans prefer that all interaction partners that
exhibit social identity cues display role-specific,
socially-appropriate behavior (Nass & Brave, 2005;
Reeves & Nass, 1996). A robot must cater to this
human need to facilitate a successful interaction, but
designers of robots are rarely attuned to human
psychological processes.
Discounting human needs and expectations has
led HRI researchers to propose design goals for
robots that fail to fully consider the needs of
humans. Creating a “robot teammate” has become a
guiding goal of the HRI community, even though the
needs and expectations of humans intended to team
with robots have not been properly considered
(Groom & Nass, 2007). Because HRI has yet to
become a fully-established field, putting careful
thought into the goals of HRI now is essential for its
future success.
Cybernetics--the study of complex systems,
particularly those that feature self-regulation--places
a strong emphasis on the value of modelling
interactions and provides an established framework
for understanding and talking about systems,
something much needed in HRI. While HRI
researchers often model systems within a robot, little
attention has been paid to modelling the interaction
between a human and a robot.
Cybernetic models featuring a goal, comparator,
actuator, and sensor clearly delineate the relationship
between systems and their environments. The
system’s goal is to affect the environment in some
manner within some parameters. The system’s
comparator determines if the goal has been achieved
and transmits this information to the actuator, which
takes some action on the environment. A sensor then
detects some feature of the environment, and this
information is passed to the comparator. With
cybernetic models, systems continually influence
and are influenced by their environments and other
systems.
In this paper, I draw on cybernetics to represent
the models shaping the design of robots intended for
323
Groom V. (2008).
WHAT’S THE BEST ROLE FOR A ROBOT? - Cybernetic Models of Existing and Proposed Human-Robot Interaction Structures.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 323-328
DOI: 10.5220/0001507103230328
Copyright
c
SciTePress

close human interaction. I critique these models and
offer revised models that include the human, the
robot, and the interaction between them. I also
model the conversational abilities required of
teammates, identifying those features that must be
developed in robots for humans to accept them. The
difficulty of meeting these requirements raises
questions as to whether the field of HRI is pursuing
optimal goals.
2 HRI DESIGN TODAY
Today’s robots are not yet capable of serving in
roles like teammate that require sophisticated social
capabilities. While designers are working on
creating robots capable of filling these roles, the
majority of existing robots fill less demanding roles.
These roles have lower requirements for autonomy,
intentional action, and socially-appropriate behavior,
and are similar to those roles filled by other
advanced technologies such as computers.
2.1 Robot Roles
One role that robots are often designed to fill is task
completer. In this role, robots complete a task
designated by a human. Many military robots, such
as bomb-detecting and bomb-defusing robots, are
modelled in this role. In some cases the robot’s
system may be non-cybernetic and in others it may
be cybernetic. With non-cybernetic task-completer
robots, the human sets the goal of the robot and the
robot affects the environment in a manner intended
to achieve the goal. In the case of a bomb-detecting
robot, the robot may run tests on a potential bomb
and send data back to distantly-located humans. The
process terminates at this point, as the system lacks a
sensor, comparator, or both. The process used by the
human to select the goal is not modelled, nor is there
any indication that the robot’s behavior affects the
humans’ goals.
A cybernetic task completer is generally more
robust and capable of more complex tasks than a
non-cybernetic task completer. The Roomba is a
popular example of a cybernetic task-completer
robot. As with non-cybernetic task completers, the
goal of a cybernetic task completer is set by a
human. Unlike non-cybernetic task completers, the
Roomba features sensors and a comparator that
partly comprise a cybernetic system, which enables
the Roomba to navigate obstacles. As with the non-
cybernetic task-completer, the human is considered
only peripherally in the design process. In the case
of the Roomba, the human is modelled as having
little interaction with the robot. The human provides
the robot power, maintains and cleans it, and
initiates its activities by turning it on.
The tool is another model commonly used for
the design of robots. A tool extends humans’
influence on the environment or grants humans
power over the environment that they do not
normally possess. Because a robot tool is much like
an extension of the self, attention is paid to the
human operating the robot: the goals and processes
of the humans are often considered in the design of
the robot. The robot is designed to help a human
complete a task or range of tasks. As a tool, the
robot is outside the human system, acting within the
environment on the environment.
Search and rescue robots often take the form
of a tool. One reason robot tools are useful in search
and rescue situations is because they enable people
to examine and influence areas that are inaccessible
or too dangerous for humans to access (Casper &
Murphy, 2003). The model of the robot tool differs
from models of the robot task-completer in that the
influence of the robot on the human is
acknowledged. However, the influence of the robot
is indirect, as the human senses only the
environment which contains the robot. Additionally,
the influence of the robot on the human is limited to
the humans’ selection of the best means to
implement a task strategy. The design of the robot as
tool does not model the robot as influencing the
human directly nor directly affecting the human’s
higher level goals, such as selecting a task strategy.
2.2 Social Feedback
The existing models of robots as task completors
and tools fail to delineate the powerful direct
influence of the robot on the human. Most designers
of robots, even those within the HRI community, fail
to fully recognize the social feedback that robots
generate. The behaviors of humans that interact with
bomb-detecting and defusing robots, Roomba, or
search and rescue robots indicate that they are
receiving information from the robot beyond that
which is intentionally designed.
An ethnographic study of the use of the Roomba
in family homes found that half of all families
studied developed social relationships with it
(Forlizzi & DiSalvo, 2006). These families named
the robot, spoke to it, described social relationships
between it and pets, and even arranged “play dates”
for multiple Roombas to clean together. In addition,
the Roomba affected the cleaning strategies of
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
324
household members, with males assuming a greater
involvement in house-cleaning. Anecdotal evidence
suggests that soldiers who interact closely with
robots in high stakes situations, like bomb diffusion
and search and rescue, form close emotional bonds
with robots, giving them names and grieving when
the robots sustains serious injuries.
In these cases, humans are responding to social
information generated by the robot. Computers as
Social Actors theory (CASA) was developed by
Nass (Reeves & Nass, 1996). CASA posits that that
even when technologies lack explicit social cues,
people respond to them as social entities. Research
performed under this paradigm has shown that even
computer experts are polite to computers (Nass,
Moon, & Carney, 1999), apply gender stereotypes to
computers (Lee, Nass, & Brave, 2000), and are
motivated by feelings of moral obligation toward
computers (Fogg & Nass, 1997). Even unintentional
cues of social identity elicit powerful attitudinal and
behavioral responses from humans.
Research indicates that some of the reasons that
people respond to computers socially is because
computers exhibit key human characteristics (Nass,
Steuer, Henriksen, & Dryer, 1994), including using
natural language (Turkle, 1984) and interacting in
real time (Rafaeli, 1990). Robots generally
demonstrate even more human characteristics than
robots. Some robots, such as Asimo or Robosapien,
feature a humanoid form. Many robots, such as
Nursebot or Roomba, feature some form of
locomotion, an indicator of agency. In addition,
robots often exhibit at least some autonomous action
and appear to humans to sense their environments,
make judgments, and act on their environments. The
very nature of robots make them appear even more
like social entities than most other existing
technologies and elicit an even more powerful social
response. But only when one of the primary design
goals is to foster a social relationship, as with
entertainment robots like Aibo or Robosapien, is the
social influence on the robot considered.
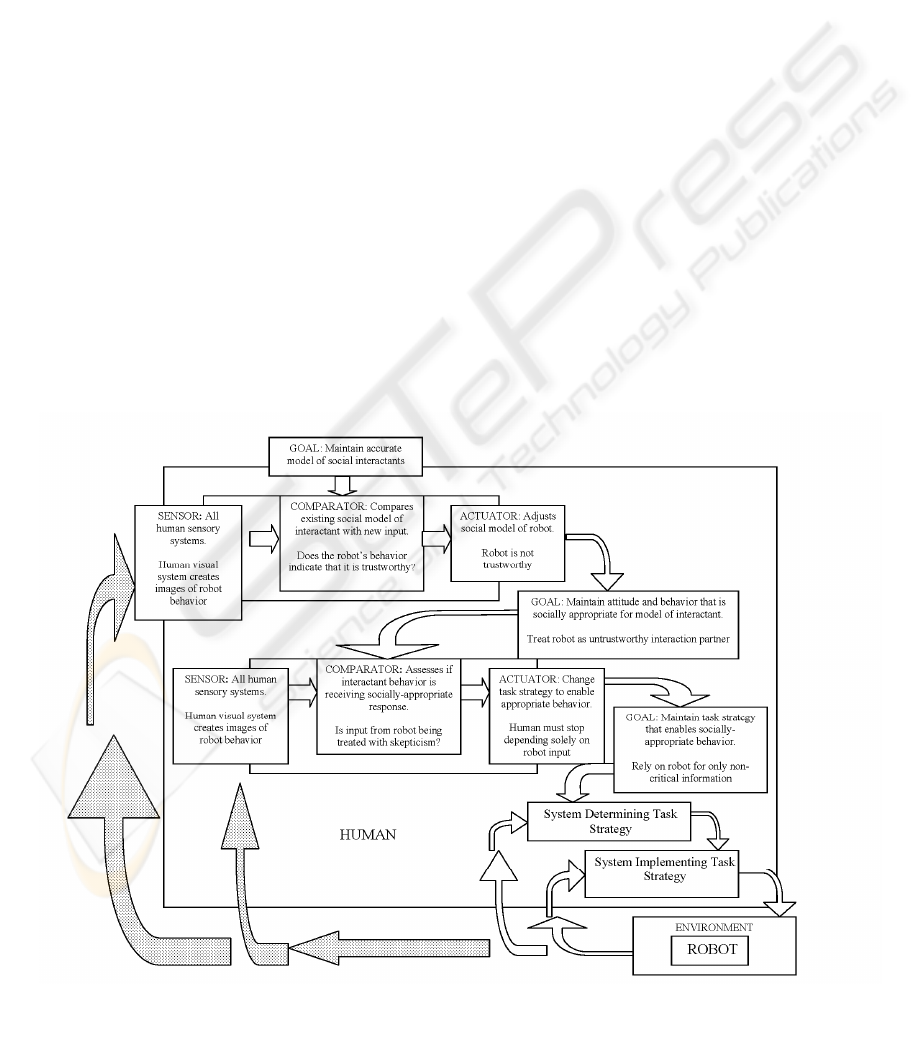
As indicated in Figure 1, the robot’s behavior has
a powerful influence on operators’ higher-level
goals. People have a high-level goal of recognizing
and evaluating social information transmitted by
others. Humans wish to respond to the behavior of
others in a socially-appropriate manner (Reeves &
Nass, 1996). While designers may have intended for
the robot to be an invisible tool, it is in fact sending
powerful cues indicating that it is a social entity. The
robots behavior may affect humans’ task strategies,
either through direct feedback or by influencing
humans’ higher level goals to act socially
appropriately.
Recognizing the influence of social feedback on
Figure 1: Model of a robot tool. Social feedback indicated with dotted arrows. Component boxes contain examples.
WHAT’S THE BEST ROLE FOR A ROBOT? - Cybernetic Models of Existing and Proposed Human-Robot Interaction
Structures
325

humans interacting with robots has important
implications for the design of robots. Designers are
more likely to consider which aspects of their design
are likely to generate a social response from humans.
Designers may be more inclined to create intentional
cues to foster a social relationship or to elicit the
desired social response. For example, it has been
demonstrated that humans apply gender stereotypes
to voices—even those that are obviously synthetic
(Nass & Brave, 2005). Awareness of this effect may
lead designers to choose robot voices not only based
on the clarity of the robot’s voice, but also based on
the desired social response.
Considering social feedback when designing
robots plays a key role in setting humans’
expectations of robots. The fewer and weaker the
cues of social identity, the lesser the likelihood is
that a robot will elicit a social response. Robotocist
Masahito Mori (1970) coined the term the “Uncanny
Valley” to describe humans’ responses of discomfort
when a robot’s visual or behavioral realism becomes
so great that humans’ expectations of human-like
behavior are set too high for the robot to meet. When
a robot is less realistic, humans have lower
expectations and are able to tolerate non-humanlike
behavior. As visual and behavioral indicators of
humanness increase and human-like behaviour
doesn’t, people become negative. Only when the
humanness of robots’ behaviors catch up to their
highly human-like appearance will robots emerge
from the valley of uncanniness. When designing
robots for interaction with humans, recognizing the
role of social information in setting user
expectations will enable designers to manage social
cues and set expectations that the robot is capable of
satisfying.
3 FUTURE OF HRI DESIGN
The roles that robots are successfully filling today,
such as task completer and tool, fail to take
advantage of robots’ full potential. Computers also
succeed in these roles, but robots have features that
computers do not. Robots have the potential to move
about their environments, sensing the world around
them, and either transmitting that information to
distantly-located humans or making decisions and
acting on the environment directly.
The ultimate goal for designers involved with
HRI is to create a robot capable of serving as a
member of a human team. Few researchers have
sought to define “team” or “team member” or
identify the requirements for creating a robot team
member. The robot team member has been generally
accepted as a lofty but worthy and attainable goal.
(For a summary and criticism of the “robot as
teammate” model, see Groom & Nass, 2007).
A well-established body of research is dedicated
to the study of teams. Successful teammates must
share a common goal (Cohen & Levesque, 1991),
share mental models (Bettenhausen, 1991),
subjugate individual needs for group needs (Klein,
Woods, Bradshaw, Hoffman, & Feltovich, 2004),
view interdependence as positive (Gully,
Incalcaterra, Joshi, & Beaubien, 2002), know and
fulfill their roles (Hackman, 1987), and trust each
other (Jones & George, 1998). If a human or robot
does not meet these requirements, they may never be
accepted into a team or may be rejected from the
team when problems arise (Jones & George, 1998).
One key requirement of teammates that underlies
all other requirements is the ability to engage in
conversation with other teammates. To be a
successful conversation partner, a robot teammate
must be able to both convey meaning in a way that
other teammates can understand and understand the
meaning intended in the communications of other
teammates. If a robot cannot do this, human
teammates can never be certain if the team shares a
common goal, which makes the human unable to
trust the robot in risky situations. Likewise, humans
would be uncertain if the robot was subjugating its
needs, viewing interdependence as positive and
knowing and fulfilling its role. Without
conversation, humans would feel certain that the
robot was incapable of sharing a mental model.
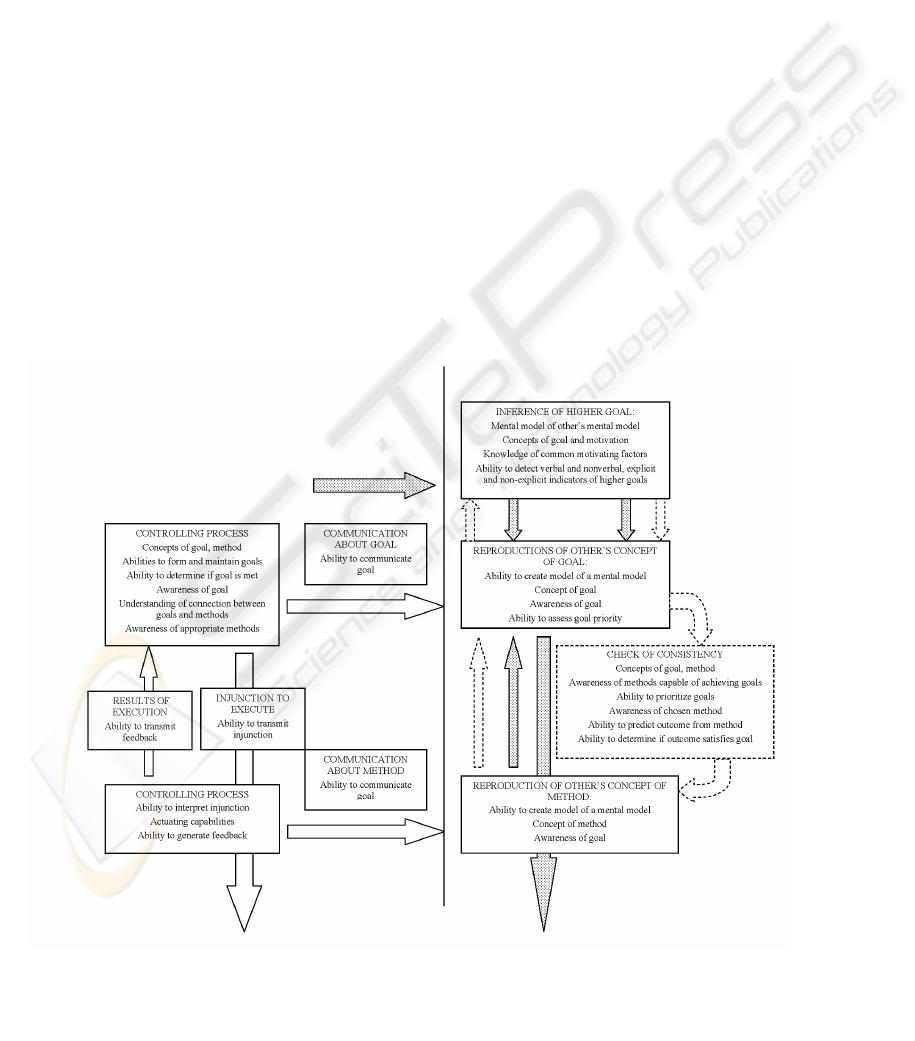
Figure 2 provides a model of conversation
between teammates that is derived from
cybernetician Gordon Pask’s (1975) Conversation
Theory (CT). One key element of this model of
conversation is the emphasis on both conversation
partners’ involvement in the communication.
Another related element is that both partners
construct the meaning of a message in their mind.
Meaning is not directly transmitted from one
conversation partner to the other, so each partner
must be capable of deriving meaning from a
message. A successful conversation requires that
each person not only ascribe their own meaning to
messages, but also infer the meaning of others and
compare the meaning of each partner to determine if
they are in agreement. While some robots are
capable of recognizing words or gestures and
responding appropriately, no robot has come close to
being able to fully engage in conversation.
Figure 2 highlights those features that must be
developed in robots for them to achieve the most
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
326
basic requirement of teammates: the ability to
engage in conversation. These requirements may be
broken down into three general categories: concepts,
knowledge, and systems. To communicate and
behave in a manner that allows humans to interpret
meaning, robots must demonstrate awareness of
basic concepts, including goals and motivation.
Robots lack humans’ complex hierarchy of goals.
Human teammates deployed in a high-stakes
situation like search and rescue maintain many goals
at once, including a goal to survive, a goal to protect
other teammates, and a goal to succeed at the task at
hand. Robots maintain a limited number of simple
goals that are always set at some point by a human.
One of the most important areas of knowledge
that robots lack is an understanding of common
human motivating factors and the relationship
between specific goals, motivations, and actions. In
order for robots to be useful in uncontrolled,
changing situations, they must posses a broad body
of knowledge. Robots’ lack of knowledge of
common goals, motivations, and actions also make
them difficult for humans to understand, eliciting
unintended negative responses from humans. While
a human’s motivation to avoid harm encourages
quick acts of self-protection, even a robot with a
goal of avoiding danger may, for example, enter and
remain in a dangerous environment, like a burning
void, and destroy itself. Human teammates are likely
to feel frustration, disappointment, and betrayal
when a robot acts in a manner that is self-destructive
and detrimental to the team.
In order for robots to be accepted by humans in
situations that rely on conversations and mutual
dependence, robots must exhibit behavior that
appears to humans to imply an underlying systems
much like the system used by humans to create and
use mental models. Human conversation partners
rely on their own mental models and their abilities to
create mental models of others’ mental models.
While it is possible that robots could successfully
fake mental models, they must rely on a system that
can serve a similar purpose to mental models and
appear to humans as a mental model. If robots are
unable to do this, humans will never feel certain they
share the same model of a goal.
Teams rely on a willingness of teammates to
subjugate their own personal goals for a team goal.
To do this, robots must demonstrate a sophisticated
goal hierarchy and effective communication skills.
Teams also depend on a high level of trust. Any
breakdowns in conversations may result in the
unraveling of the team. Maintaining trust requires
that teammates continually communicate about goals
and actions, and when trust is damaged, the
responsible party must acknowledge the violation
Figure 2: Model of a robot conversation partner. Robot must be capable to both communicate (left side) and interpret (right
side) meaning. Robot abilities that must be developed are indicated in each box. Dotted arrows indicate inferences. Dashe
d
arrows indicate checks of consistency.
WHAT’S THE BEST ROLE FOR A ROBOT? - Cybernetic Models of Existing and Proposed Human-Robot Interaction
Structures
327

and seek to repair the relationships (Jones & George,
1998). Even if a robot meets the basic requirements
of a conversation partner, its conversational abilities
will need to be further developed to meet the higher
expectations of teammates.
4 CONCLUSIONS
If designers wish to place robots in roles that have
previously been filled only by humans, they must
design robots that demonstrate the social behavior
and communication skills that humans expect of
people in these roles. To create robot teammates,
robots’ concepts of goals, motivations, actions, and
the relations between them must become further
developed and nuanced. Achieving this requires the
development of systems so complex that they
generate behaviors that enable humans to infer the
existence of shared mental models. Once researchers
recognize that creating a robot teammate takes far
more than improving a robot’s performance and
introducing it into a human team, the HRI
community can weigh the challenges of developing
a robot teammate to determine if creating a robot
teammate is indeed the best goal to guide the
direction of HRI research.
ACKNOWLEDGEMENTS
The author thanks Hugh Dubberly, Paul Pangaro,
and Clifford Nass for their feedback and support.
REFERENCES
Bettenhausen, K. L. (1991). Five years of groups research:
What we have learned and what needs to be addressed.
Journal of Management, 17(2), 345-381.
Casper, J., & Murphy, R. R. (2003). Human-robot
interactions during the robot-assisted urban search and
rescue response at the World Trade Center. Systems,
Man and Cybernetics, Part B, IEEE Transactions on,
33(3), 367-385.
Cohen, P. R., & Levesque, H. J. (1991). Teamwork. Nous,
25(4), 487-512.
Fogg, B. J., & Nass, C. (1997). Do users reciprocate to
computers? Paper presented at the ACM CHI.
Forlizzi, J., & DiSalvo, C. (2006). Service robots in the
domestic environment: a study of the roomba vacuum
in the home. ACM SIGCHI/SIGART Human-Robot
Interaction, 258-265.
Groom, V., & Nass, C. (2007). Can robots be teammates?
Benchmarks in human–robot teams. Psychological
Benchmarks of Human–Robot Interaction: Special
issue of Interaction Studies, 8(3), 483-500.
Gully, S. M., Incalcaterra, K. A., Joshi, A., & Beaubien, J.
M. (2002). A meta-analysis of team-efficacy, potency,
and performance: Interdependence and level of
analysis as moderators of observed relationships.
Journal of Applied Psychology, 87(5), 819-832.
Hackman, J. R. (1987). The design of work teams. In J. W.
Lorsch (Ed.), Handbook of organizational behavior.
Englewood Cliffs, NJ: Prentice Hall.
Jones, G. R., & George, J. M. (1998). The experience and
evolution of trust: implications for cooperation and
teamwork. The Academy of Management Review,
23(3), 531-546.
Klein, G., Woods, D. D., Bradshaw, J. M., Hoffman, R.
R., & Feltovich, P. J. (2004). Ten challenges for
making automation a "team player" in joint human-
agent activity. IEEE Intelligent Systems 19 (6 ), 91-95.
Lee, E.-J., Nass, C., & Brave, S. (2000). Can computer-
generated speech have gender? An experimental test
of gender stereotypes. Paper presented at the CHI
2000, The Hague, The Netherlands.
Mori, M. (1970). The uncanny valley. Energy, 7(4), 33-35.
Nass, C., & Brave, S. B. (2005). Wired for speech: How
voice activates and enhances the human-computer
relationship. Cambridge, MA: MIT Press.
Nass, C., Moon, Y., & Carney, P. (1999). Are people
polite to computers? Responses to computer-based
interviewing systems. Journal of Applied Social
Psychology, 29(5), 1093-1110.
Nass, C., Steuer, J., Henriksen, L., & Dryer, D. C. (1994).
Machines, social attributions, and ethopoeia:
Performance assessments of computers subsequent to
"self-" or "other-" evaluations. International Journal of
Human-Computer Studies, 40(3), 543-559.
Pask, G. (1975). An Approach to Machine Intelligence. In
N. Negroponte (Ed.), Soft Architecture Machines:
MIT Press.
Rafaeli, S. (1990). Interacting with media: Para-social
interaction and real interaction. In B. D. Rubin & L.
Lievrouw (Eds.), Mediation, Information, and
Communication: Information and Behavior (Vol. 3,
pp. 125-181). New Brunswick, NJ: Transaction.
Reeves, B., & Nass, C. (1996). The media equation: how
people treat computers, television, and new media like
real people and places: Cambridge University Press
New York, NY, USA.
Turkle, S. (1984). The second self: Computers and the
human spirit. New York: Simon & Schuster.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
328
