
A MARINE FAULTS TOLERANT CONTROL SYSTEM BASED
ON INTELLIGENT MULTI-AGENTS
Tianhao Tang and Gang Yao
Department of Electrical & Control Engineering, Shanghai Maritime University
1550 Pudong Road, Shanghai, 200135, P. R. China
Keywords: Multi-agent system, Faults tolerant control, Communication, Coalition, FIPA Agent Platform.
Abstract: This paper presents a hybrid intelligent multi-agent method for marine faults tolerant control (FTC). A new
FTC schema, implemented by different kinds of agent, is discussed as well as the structure and functions of
those agents, which have been encapsulated with intelligent algorithms to carry out different aspects in FTC.
These agents could, having a purpose of trying to earn payoff as much as possible in a mission,
communicate and form a coalition via negotiation when they find cooperation would bring them more
benefits. Simulation experiments and its results are shown at last to demonstrate the efficiency of the
proposed system.
1 INTRODUCTION
The development of modern marine vehicles is
evolving rapidly towards the direction of large scale
and complexity, as well as the trend of unmanned
intervention, to satisfy the increasing requirements
of international marine transportation trade. These
features, hereby, call for more and more safer
mechanism to guarantee the reliability of ship
manoeuvring. For this reason, that applying fault
tolerant control (FTC) theory, especially combined
with distributed artificial intelligece (DAI), into
marine control system attracted much attentions in
recent years by researchers and engineers.
FTC could diagnosis component failures in a
control system and maintain the system performance
at a possibly low but acceptable level. Accordingly,
it is possible to improve the system efficiency and to
guarantee the operation safety in the control process
(Edgar, 2000).
However, the control of marine vehicle, being a
typical large scale and complicated system, is a
nonlinear, undetermined, time-variable, and open
process. The complexity of the FD and FTC system
is growing with the increasing complexity of control
plants. To keep the FD and FTC system effective, it
is essential to encapsulate different tasks and to
define strict interfaces between plant components
and between components of the monitoring and
diagnosis system, although it is quite difficult. To
guarantee flexibility -- changing needs in case of an
industrial application, the monitoring and FTC
system has to be configurable and expandable
without the need of modifying any line of code
(Luder, 2001). The diagnostic knowledge about an
industrial process is available on different parties
(process specialists, component manufacturers, etc.).
A modern FD and FTC system should be able to
integrate the diagnostic knowledge from all
available sources, even if different diagnostic
mechanisms are applied. To achieve an overall
diagnosis of a control process, several diagnostic
tasks have to be performed in parallel. This requires
new strategies to handle diagnostic conflicts that
might occur between different diagnostic results.
Multi-agent system (MAS), about which rapid
progress has been made, is an important research
branch in DAI parallelized with distributed problem
solving (DPS). Possessing modularity, adaptability
and other attractive characteristics, MAS drew much
attention in recent years and is adopted by many
researches in control systems.
This paper presents a hybrid intelligent mutli-
agent method for mrine fault tolerant control. The
architecture of the MAS, as well as the structure of
an agent, and the control diagram are designed in
section 2. Then, the algorithms encapsulated in the
information processing mudule of agents are briefly
mentioned in section 3. In section 4, simulation
experiments, applying the proposed method in
357
Tang T. and Yao G. (2008).
A MARINE FAULTS TOLERANT CONTROL SYSTEM BASED ON INTELLIGENT MULTI-AGENTS.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - ICSO, pages 357-362
DOI: 10.5220/0001506203570362
Copyright
c
SciTePress
marine FTC system, is carried out. And the
conclusion of this paper is made in section 5.
2 SYSTEM ARCHITECTURE
2.1 MAS Perspective
The framework of hybrid intelligent multi-agent
method, with hierarchical and federal organized
intelligent agents that are responsible for different
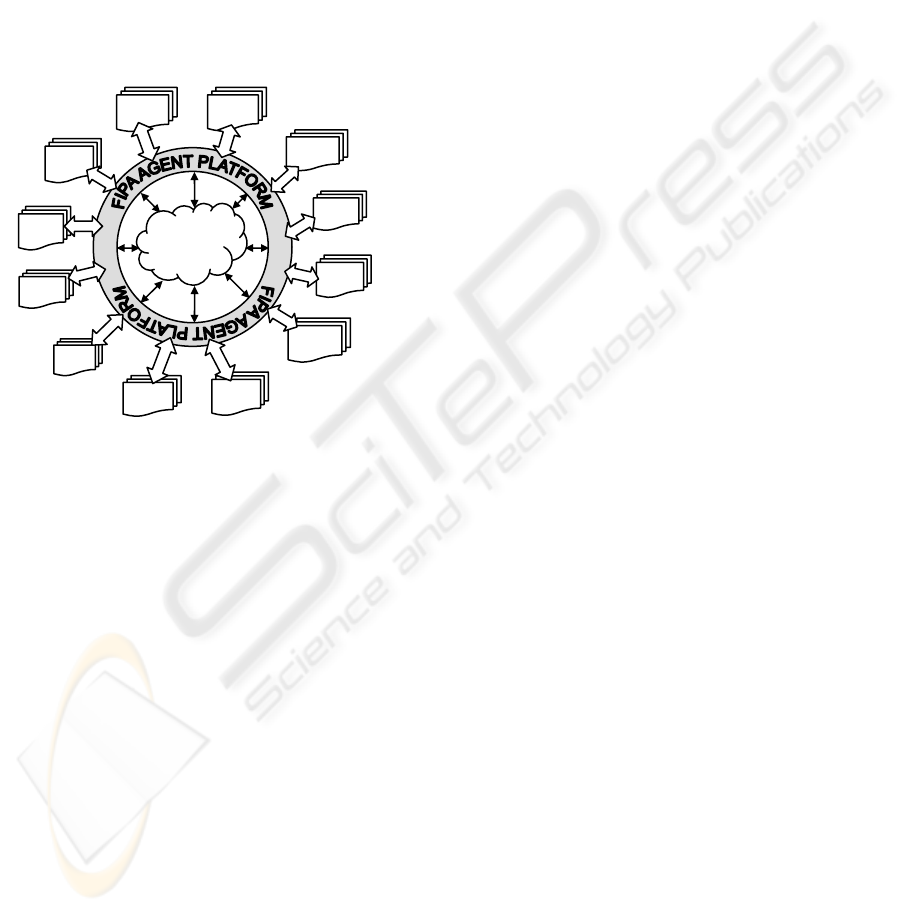
tasks, is presented in figure 1.
Figure 1: Architecture of MAS organization.
As shown in the figure, many agents with different
capabilities are connected together by accessing
FIPA Agent Platform and through communication
networks to form a MAS. In this system, each
individual has a special function that can work
autonomously and independently. Although being
fully autonomous, like human beings, on the other
hand, agents in the figure trend to seek cooperation
to fulfil more difficult task if they believe that better
payoff will gain by form a coalition or the job
assigned to some agents is impossible to achieve
with their own capability. To facilitate a coalition,
superadditive environment (Nicholas, 2007) is
assumed in this paper.
At agent level, all agents in proposed system
have the same hybrid architecture, where the agents
are capable of reactive and deliberative behaviours.
The proposed agent architecture is based on
horizontal layering where all layers are connected to
the perception and actuation of the agents with the
environment. In the reactive layer, an agent could
deal with urgent situations according to the rule in
its rules library while it will do some inference, in
normal case, in its information processing module
(IPM), which has been encapsulated with intelligent
algorithms and upon which different type of agents
are determined, according to the current mental state,
knowledge and goal in deliberation layer.
Details about the MAS and agent architecture
could refer to (Yao, 2007).
In figure 1, twelve species of agent, which are
determined by different algorithms in an agent’s
IPM, are involved: MAs are mainly used in FIPA
Platform to manage the life cycle of agents; FAs
provide yellow page services; DAAs are responsible
for interoperation with database; RGUIAs and
LGUIAs are graphic user interface extendedly and
locally respectively; FDAs are in charge of diagnosis
faults for the whole system; FTCAs are going to do
fault tolerant control in case that the system actuator
lost efficiency. SEAs are supposed to replace failed
sensors by estimating state signals and feedback
them to keep the system stable; SIAs collaborate
with the FTCA to do fault tolerant control; SCAs
answer for switching feedback signals from failed
sensors to SEAs; OMAs maintain term mapping
tables between different domain ontologies; CRAs
resolve conflicts in diagnosis results reported by
different FDA. When faults exist in a control system
or a user instruction is issued, all the above species
of agent will act autonomously and could
communicate to form coalitions to fulfil the task
with lease cost.
2.2 Control System Perspective
The architecture of MAS was discussed in last
section. In order to illuminate how those agents
implement fault tolerant control in a control system,
this section describes MAS based FTC system
architecture in a state feedback control system
perspective, as shown in figure 2.
In the figure, r is system reference; u is the
output of an adaptive fuzzy neural network (AFNN)
based FTCA, which acts as system controller; OV is
omen variables collected by fault diagnosis agents;
x
~
is the difference between x (the detected value
from system sensor) and x
ˆ
(the output value of an
output recurrent neural network (ORNN) based
SEA), which is use by IPM of SEA to train the state
OMA
FDA
FTCA
SEA
LGUIA
RGUIA
CRA
MA
FA
DAA
Communication
Networ
k
SCA
SIA
MA-Management Agent; RGUIA/LGUIA-Remote/Local
Graphic User Interface Agent; FDA-Fault Diagnosis Agent;
SCA-State Control Agent; FTCA-Fault Tolerant Control
Agent; SEA-State Estimate Agent; FA-Facilitate Agent;
OMA–Ontology Mediate Agent; SIA-System Identification
Agent; CRA-Conflict Resolution Agent; DAA-Database
Access A
g
en
t
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
358
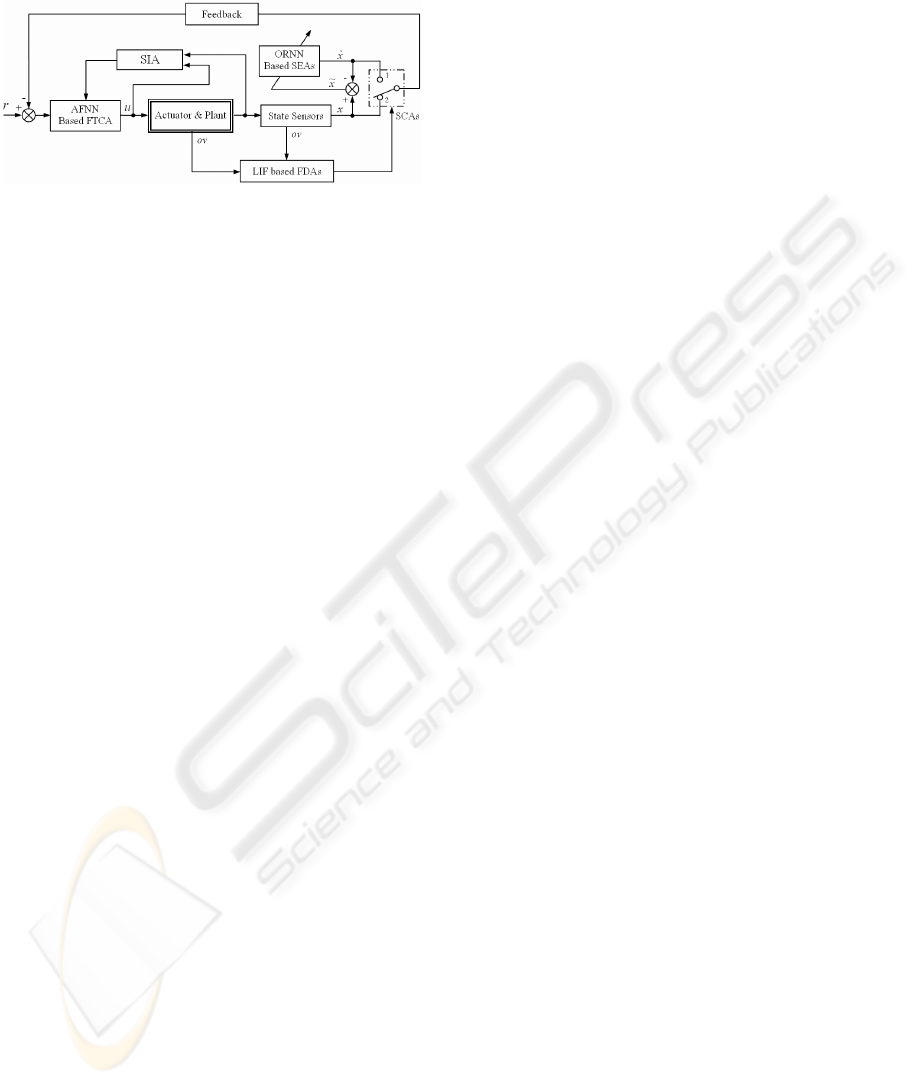
estimation neural network on line; SCAs are used to
cut off failed sensors.
Figure 2: Architecture of MAS based FTC system.
In this FTC system there are three distinct parts that
differ from traditional control systems: fault
diagnosis agents to diagnose system failure, state
estimation agents to estimate state approximately
when the sensor failed, and system self-adaptive
controller, realized by FTCA, for FTC under
actuator faults:
(1) In the LIF based FDA, two kinds of faults,
actuator faults and sensor faults will be diagnosed. If
actuator faults happened, FTCA will take some
responding actions according to the fault state.
While the sensor faults have been found, the SEA
will play a part in the sensors.
(2) A SEA based on an output recurrent neural
network is proposed to provide the system states
estimation to replace the fault sensors. Usually, SCA
controls the switch to be on the position 2. In this
case, the system state feedback signals will be from
sensors. If the sensor faults occur, SCA will switch
to the position 1. In this case, the signals from SEAs
will be used as the system feedback.
(3) The FTCA, system controller, will give
different control strategy according to the system
state and fault cases to keep the system performance.
For example, when a fault from the actuator was
detected, the FTCA based on AFNN could adjust the
control signal to overcome the influence of the fault
according to the system response on line.
3 INTELLIGENT ALGORITHMS
OF AGENTS
As mentioned above, algorithms encapsulated in an
agent’s IPM determines its functions. In the IPM of
a FDA, multi-layer information fusion technology is
adopted for fault diagnosis, which separated fault
diagnosis into two parts: local diagnosis fusion
implemented by multi-sensors fuzzy inference and
global diagnosis fusion implemented by a three-
layer fuzzy neural network. In SEA, a new output
recurrent neural network is designed to construct the
system state estimator. For FTCA, a self-adaptive
fuzzy neural network is proposed as its information
process method. Detail about these solutions could
refer to (Yao, 2006)
4 SIMULATION EXPERIMENTS
4.1 Experiment Platform
In this simulation, the MAS framework is coded in
JADE platform, a software development framework
for agent application developed by TILAB. The
algorithms mentioned in section 3 are coded in
Matlab 6.5.
To implement calling Matlab methods from
JADE, JMatLink, a small toolkit to connect Java
with Matlab, is used to call for the functions in an
m-file.
The main user interface of MAS compiled in
JADE is shown in figure 3.
4.2 Working Flow of MAS
A prominent advantage of MAS is that agents could
discover an optimized way to fulfil tasks by
negotiation, coordination and cooperation via
sending messages. Accordingly, the communication
and cooperation between agents are the most two
important research topics regarding MAS.
The communication among agents, as well as
their knowledge and mental state, is based upon
domain ontology. But different ontologies regarding
one domain may exist sometimes in a system. These
ontologies contain different terms, which engender
great obstacles for agent communication, to express
same or similar concepts. Dealing with this problem,
a method called term substitution based on
intelligent ontology mapping is proposed and
implemented by ontology mediation agent (OMA).
OMA maintain glossary mapping tables between
domain ontologies. When an agent receives an ACL
message containing a few baffling words, the agent
forwards this message to OMA for interpretation. If
OMA could find terms in an ontology upon which
this agent based corresponding to those baffling ones,
it will substitute them and send the message back.
And then, the agent will understand the message
meaning.
AFNN-Adaptive Fuzzy Neural Network
ORNN-Output Recurrent Neural Network
LIF- Layered Information Fusion
A MARINE FAULTS TOLERANT CONTROL SYSTEM BASED ON INTELLIGENT MULTI-AGENTS
359
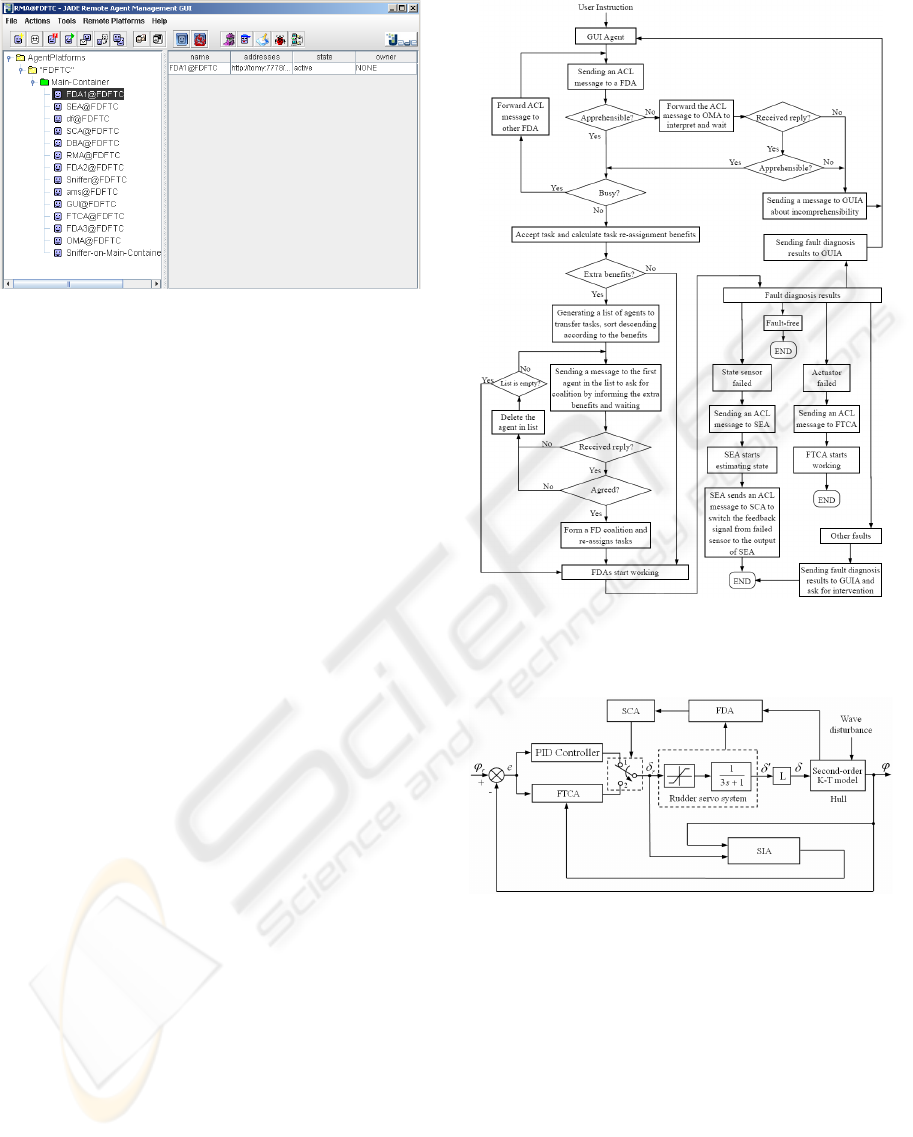
Figure 3: MAS interface in JADE.
Cooperation will bring agents more efficiency and
benefits, while coalition is an important solution to
implement it. As mentioned in section 2.1,
superadditive environment is assumed to facilitate
the coalition formation. Under this circumstance,
agents in MAS are inclined to form a grand coalition,
because they believe that they will earn payoff in
this coalition at least as much as those they will get
if they work alone. New task and payoff allocation
algorithms are also put forward. Details about these
solutions regarding with the agent communication
and coalition will be specified in future papers. And
some research results about these solutions have
been applied in agents work flow in this simulation
experiment, as illustrated in figure 4.
4.3 Marine FTC System Framework
The method proposed above had been used in
marine automatic steering system for actuator fault
tolerant control. The structure of ship FTC system is
shown in figure 5.
In order to represent the rudder faults, a
coefficient called as loss of efficient (LOE) is
introduced to simulate the faults. When the rudder is
normal, define LOE=0. And define LOE=1 if the
rudder is whole failure. So the coefficient LOE
expresses the fault degree of the rudder. In the
simulation system, the faults of the rudder servo
system could be set by fault factor L, which is
defined as L=1-LOE.
Figure 4: Flow chart of MAS based FTC process.
Figure 5: Marine FTC System.
Marine vehicles will definitely be disturbed by
ocean wave which is the uppermost factor to cause
ship rolling. Usually, wave motions on a ship can be
analytically computed using strip theory. The ocean
wave spectrum model adopted in the simulation is
shown in figure 6.
4.4 Simulation Results
During the simulation, Sniffer, a monitoring tool in
JADE, is used to sniffer the communication of
agents. The monitoring result is shown in figure 7.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
360
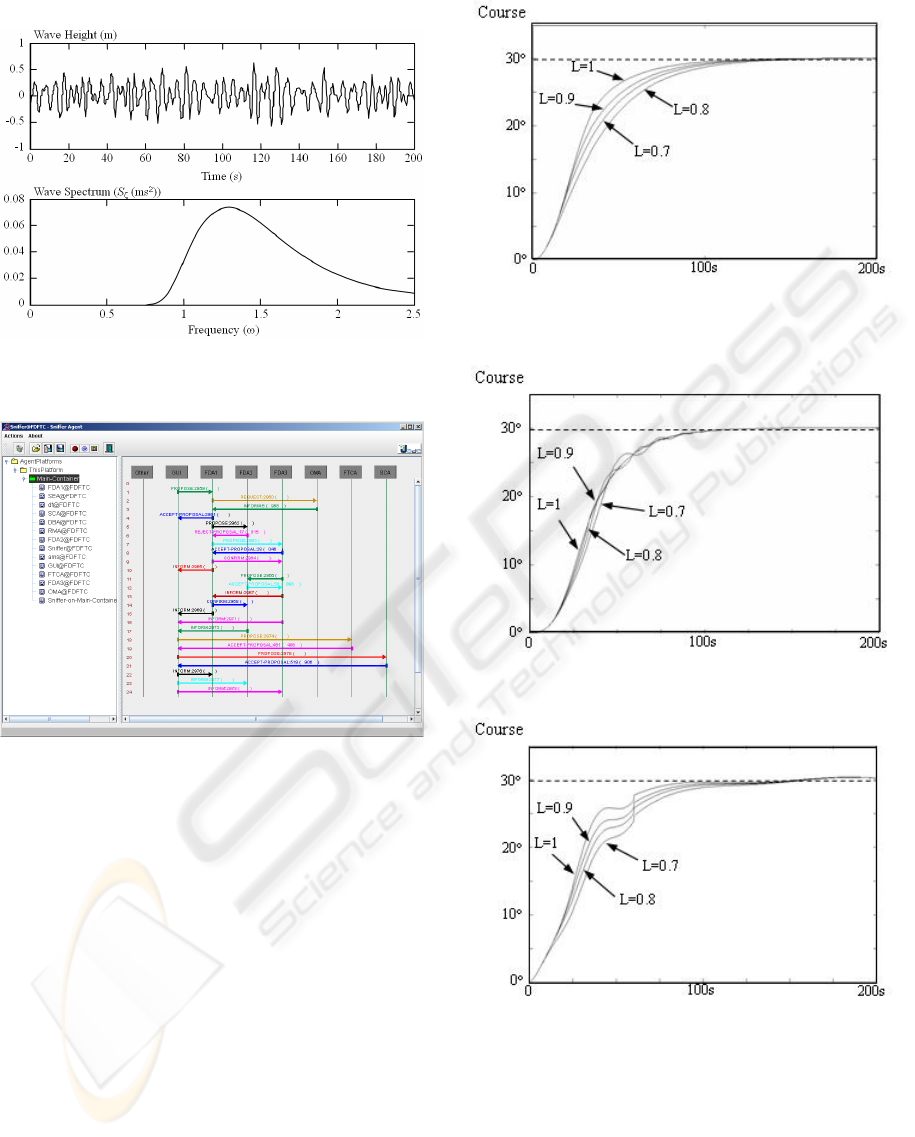
Figure 6: Ocean wave spectrum.
Figure 7: The communication of cooperated agents.
Some rudder faults with different degrees are used to
test the performance of the proposed system. In
these cases, the effect of FTC is simulated with and
without wave disturbances.
To judge how well the FTC method performs, a
PID controller is used to perform the same tasks
under the same conditions. Some simulation results
are shown in figure 8 ~ figure 11.
In order to make a detailed comparison between
the two kinds of controllers with rudder faults, the
rise times of the ship steering system are recorded to
evaluate the performances, where the rise time is
defined as the time taken for the ship to rise from
five to ninety five percent of the demanded yaw
angle. The rise times of the two controllers in
different fault conditions without and with
disturbances have been compiled in Table 1 and
Table 2 shown below.
Figure 8: Ship courses with PID controller (without
disturbance).
Figure 9: Ship courses with FTCA (without disturbance).
Figure 10: Ship courses with PID controller (with
disturbance).
A MARINE FAULTS TOLERANT CONTROL SYSTEM BASED ON INTELLIGENT MULTI-AGENTS
361
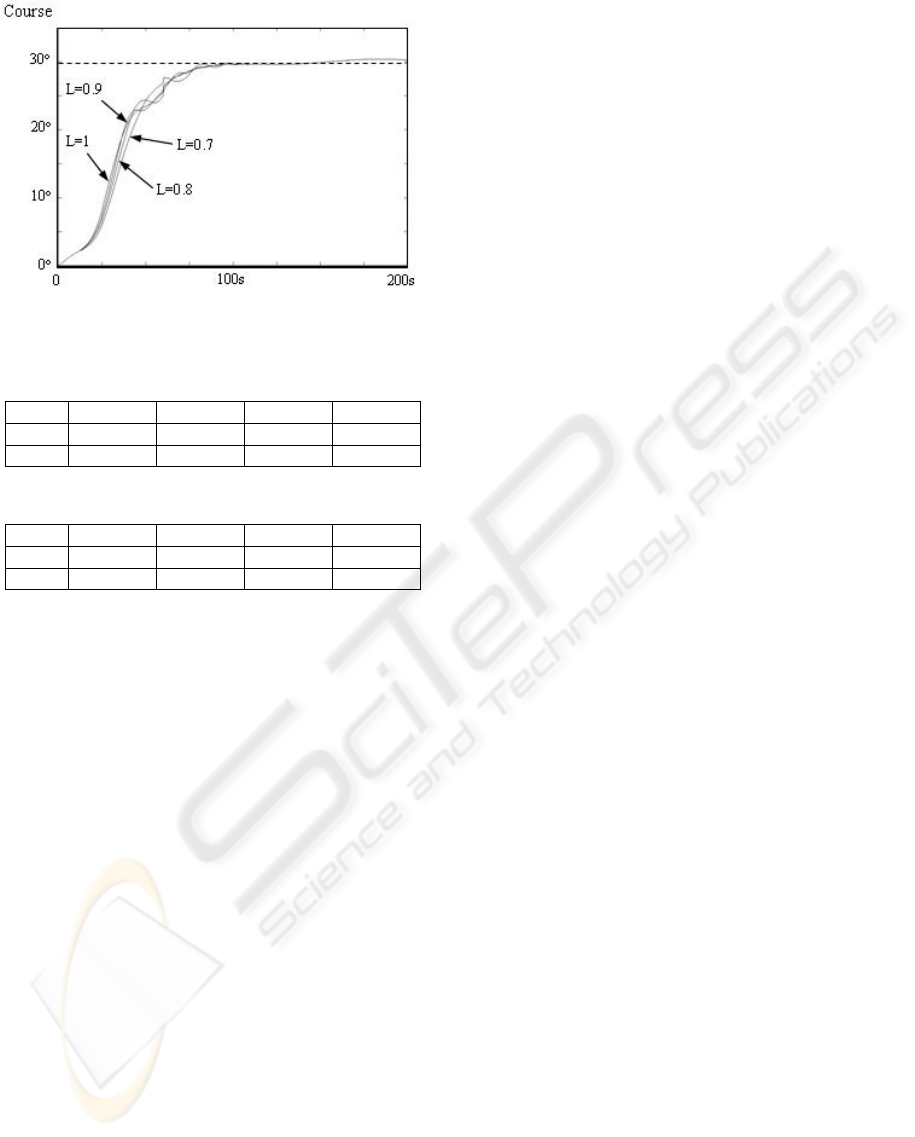
Figure 11: Ship courses with FTCA (with disturbance).
Table 1: Rise Times without Disturbances (s).
LOE =0 LOE =10% LOE =20% LOE =30%
PID
70 81 87.5 96.5
FTCA
70 70 70.5 71
Table 2: Rise Times with Disturbances (s).
LOE =0 LOE =10% LOE =20% LOE =30%
PID
75 84 90 98.5
FTCA
75 75.5 77 79.5
From the figure 7, it could be seen that different
types of agents in MAS followed the working flow
shown in figure 4 to work cooperatively. When a
FDA found there exists baffling terms in an ACL
message, it will ask for help to OMAs automatically.
If an agent finds that extra value will be gained if
tasks are re-assigned, it will send proposing message
to others about coalition by informing this value.
When the coalition is formed, tasks will be done and
coalition value will be divided according to each
agent’s contribution.
From the showings of figure 8, figure 10 and two
tables, it is easy to find that the PID control system
doesn’t have the fault tolerant capability; when the
rudder servo system lost some efficiency, the system
performance is greatly reduced with increased rise
time and stable time.
Figure 9, figure 11 and also those two tables
show that in the MAS based marine fault tolerant
control system, the system’s performance can be
distinctively improved in the condition of actuator
failure; it is nearly close to the normal performance.
The rising time and stable time are not influenced
much. The target of actuator fault tolerant control is
fulfilled.
From the simulation experiment above, it is easy
to find that the MAS based marine fault tolerant
control system can adapt to different failure modes
when the rudder servo system is partially failed. It
successfully realized fault tolerant control for
actuator failure by the multi-agents organization
shown in figure 1. The agents could communicate to
seek coalition autonomously. Adopting this MAS
based method will need no object’s mathematic
model and could realize cooperation between
heterogeneous intelligent algorithms.
5 CONCLUSIONS
This paper describes a concept of building a hybrid
intelligent fault tolerant control system for marine
vehicles based on the application of MAS, and also
proposed a new fault tolerant control schema
integrates several algorithms implemented within the
MAS method, which allows the flexibility, the
extendibility, and a cost-effective development of
the system. Details about the overall architecture,
algorithm encapsulated in IPM, and coding tools are
discussed. And at last, some simulation experiment
results are given to demonstrate the efficiency of the
presented system.
ACKNOWLEDGEMENTS
This work was supported by Natural Science Fund
of China (NSFC 60434020, 60572051); the
Education Key Project (07ZZ102) and the Education
Development Project (08YZ109) from Shanghai
Municipal Education Commission.
REFERENCES
Edgar, T. F., Dixon, D. A, 2000, Computational needs of
the chemical industry, University of Texas Press.
Luder, A., et al., 2001, Industrial requirement and overall
specification. Prepared within the PABADIS IST
research project no. IST-1999-60016. Available at
www.pabadis.org.
Nicholas R. Jennings, 2007, Forming fuzzy coalitions in
cooperative superadditive games, IEEE International
Conference on e-Business Engineering (ICEBE'07)
pp 221-228.
Yao Gang, Tianhao Tang, 2007, A hybrid intelligent
multi-agent method for monitoring and faults
diagnosis, 4th International Conference on Informatics
in Control, Automation and Robotics, France.
Guy Lebret, Gang, Yao, 2006, A gain-scheduling and
intelligence fusion method for fault-tolerant control,
6th IFAC Symposium on Fault Detection, Supervision
and Safety of Technical Processes, Beijing, China.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
362
