
AN OPTIMIZATION PROCEDURE TO RECONSTRUCT THE
AUTOMOBILE INGRESS MOVEMENT
Ait El Menceur M. O., P. Pudlo, F.-X. Lepoutre
LAMIH UMR CNRS 8530, University of Valenciennes, Valenciennes, France
P. Gorce
HANDIBIO-LESP EA 31-62, University of Sud Toulon-Var, La Garde, France
Keywords: Multi objective optimization, Modelling and simulation, Automobile ingress movement reconstruction.
Abstract: To simulate the automobile ingress movement, joint angles are needed. The joint angles are computed from
the experimental data issued from an optoelectronic motion capture system. As these systems are often
corrupted by problems related either to the system or to the experimentation, the computed angles are
biased. Lempereur et al. (2003) proposed an optimization procedure to remedy to this problem. However,
their method gives good results only on the end effectors’ trajectories, while the other bodies’ trajectories
are not considered by their method. That degrades the positions of these parts and causes their eventual
collisions with the vehicle’s parts. On the other hand the corrected angles present some vibrations causing
unrealistic simulation. In this paper we present a multi objective optimization based procedure to correct the
joint articulation angles in automobile ingress movement. Our method minimizes the distance between all
reconstructed trajectories with the real ones at each step of time. Our method follows a compromise between
all trajectories of the model. Our method gives better global results. Correction of the joint angles allows a
realistic simulation.
1 INTRODUCTION
Automobile accessibility is a serious problem for
elderly and/or disabled people that can lead them to
stop driving definitely (Cappelaere et al., 1991). To
avoid losing these customers, who are in a
continuous increasing in the industrialized countries
(Brutel, 2002), car manufactures show their interest
in this population and in its behaviour during the
accessibility movement. The new vehicles tend to be
adapted so that to give less discomfort for drivers.
However, vehicles can not be modified without
considering the driver. Traditionally car
manufactures use physical mock ups to test new
vehicle prototypes. However, this procedure is very
expensive and less reliable (Verriest, 2000). To
remedy to its disadvantages, car manufactures had
the recourse to the using of numerical simulation
(Porter et al., 1993), (Tessier, 2000). HANDIMAN
project goes in this direction and aims to integrate
the accessibility discomfort evaluation in the first
stage of the new vehicle conception for elderly
and/or disabled people (Ait El Menceur et al., 2007).
This evaluation is done on the basis of the
accessibility movement simulation. Simulation
requires modelling of the system to simulate. In our
case the system is the human being.
Modelling requires knowledge of the system.
The knowledge is acquired from the experimentation
on the human being. In HANDIMAN project we
used an optoelectronic motion capture system to
capture the ingress/egress movements of elderly
and/or disabled people (Ait El Menceur et al., 2007).
Even though they are among the most reliable
movement studying systems, the use of
optoelectronic systems encounters some problems
(Cappozzo et al., 1996). These problems are due
either to the system itself or to the experimental
protocol. One of the problems met in the
reconstruction, and caused by the experimental
protocol, is the computation of joint articulation
angles from non rigid bodies (human body) and the
integration of these angles in a rigid body structure
(humanoid model). The resulted angles are biased
and their using in the movement reconstruction
induces false trajectories of the humanoid. These
165
El Menceur M. O. A., Pudlo P., Lepoutre F. and Gorce P. (2008).
AN OPTIMIZATION PROCEDURE TO RECONSTRUCT THE AUTOMOBILE INGRESS MOVEMENT.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 165-168
DOI: 10.5220/0001498001650168
Copyright
c
SciTePress
trajectories can provoke the humanoid’s collision
with the different vehicle’s parts (collision of the
head with the roof, knee with the steering wheel,
penetration of the humanoid inside the seat…).
Lempereur et al. (2003) proposed an
optimization based approach to remedy to this
problem. This procedure minimizes at each step of
time the distance between the measured trajectory
(desired trajectory) of the end effector and the
trajectory of the humanoid reconstructed from the
computation of the joint angles. This procedure
gives good results on the end effortor’s trajectories.
However, as it does not consider other body parts’
trajectories (like knees, ankles) these lasts can have
erroneous trajectories as they can enter in collision
with the vehicle’s parts.
In our study we propose an optimization method
based on a multi objective function that considers
the trajectories of many body parts. Our method
aims to minimize at each step of time the distance
between the measured trajectories and the
trajectories of some body parts (feet, ankles, knees,
hips, trunk, neck and head).
Our paper is organized as follows: Section 2
presents the method. Section 3 will detail our
optimization procedure. The results will be shown in
section 4. The paper is concluded in section 5.
2 METHOD
2.1 Experimentation
The experiments were conducted as part of the
French HANDIMAN (RNTS 2004) project. This
project aims at integrating the ingress/egress
discomfort for elderly and/or disabled persons in
first stages of new vehicle conception for these
populations. This project considers several trials of
ingress and egress movement of 41 test subjects on
four vehicles representative of a large part of
vehicles present in the trade (Ait El Menceur et al.,
2007). In the present study only the ingress trial of
one subject on one vehicle is considered, the other
trials of other subjects are similar. The trial is
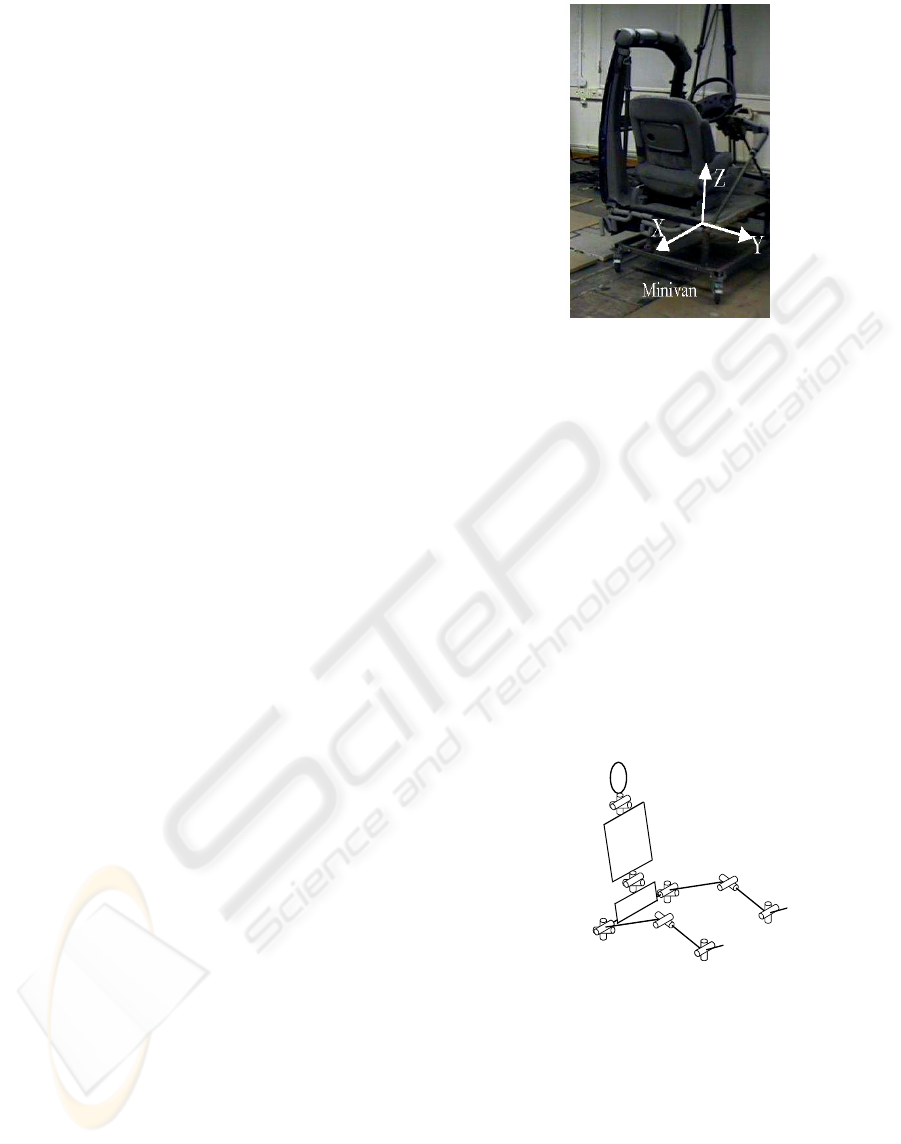
performed on a minivan vehicle (see figure 1).
An optoelectronic motion capture system
Vicon® 612 at sampling rate of 60 Hz is used. The
system is equipped with 8 CCD cameras.
Fifty three anatomical markers are set on the
different body segments of the subject to capture the
movements during the different acquisitions (Ait El
Menceur et al., 2007).
The joint angles are computed for each joint. The
ISB recommendation is adopted (Wu et al., 2002).
Figure 1: The stripped vehicle used in the study.
2.2 Humanoid Model
To reconstruct the ingress movement, we propose a
three dimensional model of 20 DOF considering the
two lower limbs and the trunk with the head.
The 20 DOF of the Humanoid model are
partitioned as follows: 3 DOF for each hip, 3 DOF
for the joint linking the two bodies of the trunk (T10
vertebra according to (Lempereur et al., 2005)), 3
DOF for the joint linking the head to the upper
trunk, 2 DOF for each knee and ankle. The
humanoid’s articulations are rotoid. The convention
of Denavit and Hartenberg (Denavit and Hartenberg,
1955) was adopted in the humanoid modeling
process. The humanoid model is represented in
figure 2.
Figure 2: Humanoid model.
3 OPTIMIZATION PROCEDURE
Our method uses a multi objective optimization
procedure. It minimizes the sum of the distances
between all reconstructed trajectories of different
body parts of our humanoid with the measured ones.
The mathematical formulation of our optimization
problem is given by the following expression.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
166
∑∑
==
−=−
N
1i
jidi
N
1i
idi
)q(fXminXXmin (1)
With N is the number of the body parts whose the
positions are to be corrected.
. : is the Euclidian
distance (norm)
.
j
q
with j=1…7 (for the lower limbs
chain) and j=1…6 (for the trunk chain) are the
calculated joint angles.
j
f
are parts of the forward
geometric function giving the positions of each body
part.
The final expression of our optimization procedure
is given as follows:
⎪
⎪
⎪
⎩
⎪
⎪
⎪
⎨
⎧
<−
ε<−
<<
∑
−
−
=
i1ii
iicali
maxiimini
N
1i
jidi
Vqq.SC
qq.SC
qqq.SC
)q(fXmin
(2)
The first constraint concerns the physiological
angles limitation (Kapandji, 1974).
The second constraint imposes to the optimized
angles to not diverge too much from the calculated
angles.
i
ε are found after several trial and error tests.
For the lower limbs chains we kept same values of
i
ε proposed by Lempereur et al. (2003). For the
trunk chain we identified the corresponding
i
ε
:
Table 1: Values of
i
ε
for the trunk chain.
Joints
i
ε
Joint linking the two parts of the trunk
- Flexion/Extension 19°
- Abduction/Adduction 17°
-Lateral/Medial rotation 13°
Joint linking the head to the upper
trunk
- Flexion/Extension 23°
- Abduction/Adduction 17°
-Lateral/Medial rotation 13°
The third constraint is the constraint of
continuity.
i
V is the maximum variation allowed
between two successive optimized angles.
The maximum variations of the different joints
depend on the movement and on the population.
Like in (Lempereur et al., 2003) our optimization
procedure is achieved by using the Matlab®
Optimization toolbox which uses the sequential
quadratic program.
4 RESULTS
We have applied the method of Lempereur et al.
(2003) and our method on different kinematic chains
of our model. In general the method of Lempereur et
al. (2003) gives good results on the end effectors
trajectories. However it degrades the positions of
other parts. On the other hand, the angles corrected
by the method of Lempereur et al. (2003) show
many vibrations and these lasts influence negatively
on the reconstruction and rendering it “unrealistic”.
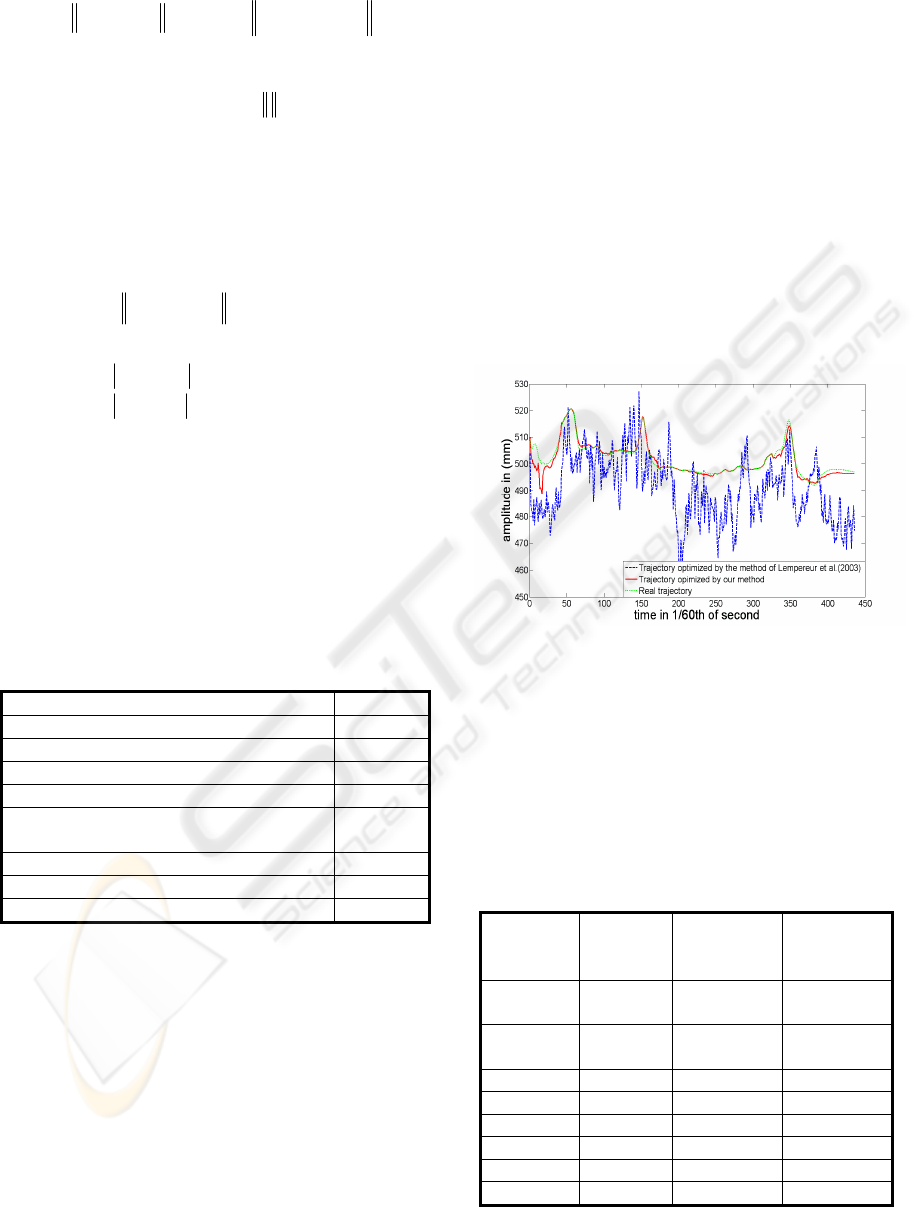
For an illustration purpose we present the
optimization results of the method of Lempereur et
al. (2003) and our method on a bit of the right ankle
trajectory. Our method allows good correction of the
right ankle trajectory. On the other hand this last is
smoothed.
Figure 3: Right ankle different trajectories.
The three dimensional RMS between, respectively,
reconstructed trajectories, trajectories optimized by
Lempereur et al. (2003) method, our method and the
real trajectories are represented in table 2
.
Table 2: RMS (in mm) between, respectively,
reconstructed trajectories, trajectories optimized by
Lempereur et al. (2003) method, our method and the real
trajectories.
Model
Method of
Lempereur
et al. (2003)
Our method
Right
knee
19.0 19.4 18.5
Right
ankle
19.3
6.4
3.7
Right foot 20.1 0.0 3.3
Left knee 23.5 32.6 25.4
Left ankle 23.3 13.0 5.6
Left foot 24.4 0.3 5.0
C7 4.3 56.8 34.6
Head 69.6 5.7 16.6
AN OPTIMIZATION PROCEDURE TO RECONSTRUCT THE AUTOMOBILE INGRESS MOVEMENT
167

The method of Lempereur et al. (2003) gives good
results on the end effectors’ trajectories which can
even lead to their superposition with the measured
trajectories.
However we can see some degradations on other
body parts trajectories (like knees and ankles) and
that induces to eventual collisions of these parts with
the vehicle’s parts, like collision of the knee with the
steering wheel or penetration of the legs inside the
seat.
5 CONCLUSIONS
We have proposed another optimization method
based on a multi objective function to correct the
joint articulation angles in automobile ingress
movement. Our method minimizes at each step of
time the distances between all humanoid body parts’
trajectories and their real trajectories. We kept same
constraints defined by Lempereur et al. (2003) for
the lower limbs.
Unlike the method of Lempereur et al. (2003),
our method gives good global results on all
trajectories. This is due to the fact that it follows a
good compromise between all trajectories and at
every step of time.
The correction of the joint angles will allow a
realistic simulation.
Our method presents slight degradations of some
body parts’ trajectories. That can be enhanced by
integrating some weighting factors on some
trajectories.
ACKNOWLEDGEMENTS
This research was supported financially by the
European Community, the Délégation Régionale à la
Recherche et à la Technologie, the Ministère de
l'Education Nationale, de la Recherche et de la
Technologie, the Région Nord Pas de Calais and the
Centre National de la Recherche Scientifique. The
authors gratefully acknowledge the support of these
institutions.
The authors would like to thank those at SMPR,
INRETS, and Renault who participated in the
HANDIMAN project.
REFERENCES
Ait El Menceur, M-O., Pudlo, P., Découfour, N.,
Bassement, M., Gillet, C., Chateauroux, E., Gorce, P.,
Lepoutre, F-X., 2007. Towards dynamic studying of
the car ingress/egress movement for elderly and
disabled population. in proceeding with IEEE
HUMAN'07, Human Machine iNteraction Conference,
Timimoun, Algeria, march 12-14
th
. pp. 350-355.
Brutel C., 2002. La population de la France métropolitaine
en 2050 : un vieillissement inéluctable. Economie et
Statistique, N°355-356, pp 57-71.
Cappelaere, A., Thévenon, A., Delcambre, B., 1991.
Polyarthrite rhumaoïde et conduite automobile. Essais
contrôlés d’un véhicule de série. Ann. Réadaptation
Méd. Phys, 34, pp 239-244.
Cappozzo, A., Catani, F., Leardini, A., Benedetti, M. G.,
Croce, U. D., 1996. Position and orientation in space
of bones during movement : experimental artifacts,
Clinical Biomechanics, Vol. 11, No. 2, pp. 90-100.
Denavit, J., and Hartenberg, R. S., 1955. A kinematic
notation for lower pair mechanism based on matrices,
Journal of Applied Mechanics, Vol. 22, pp. 215-221.
Kapandji, I. A., 1974. Physiologie articulaire, Fascicule II,
Membre inférieur, Librairie Maloine S. A., Paris.
Lempereur, M., Pudlo, P., Gorce, P., Lepoutre, F-X.,
2003b. Optimization approach for the simulation of
car accessibility movement. Proc. of the IEEE
International Conference on Systems Man and
Cybernetics, october 5-8, Washington DC, USA,
octobre, ISBN 0-7803-7953-5.
Lempereur, M., Pudlo, P., Gorce, P., Lepoutre, F-X.,
2005. Mannequin virtuel adapté à la simulation du
mouvement d'entrée-sortie au véhicule automobile.
Journal Européen des Systèmes Automatisés, 38 (7-8),
pp. 959-976.
Porter, J. M., Case, K., Freer, M.T., Bonney, M.,
1993.Computer-Aided Ergonomics Design of
Automobiles. In Automotive Ergonomics, Eds.
Peacock and Karwonski, Taylor & Francis, 43- 78.
ISBN: 0748400052, 1993.
Tessier, Y., 2000. Vers des mannequins numériques
integrés dans la conception de produits . Les modèles
numériques de l'homme pour la conception de
produits, Lyon-Bron.
Verriest, J. P., 2000. Les mannequins numériques dans la
conception de produits. Les modèles numériques de
l'homme pour la conception de produits , Mars 2000,
Institut National de Recherche sur les Transports et
leur Sécurité.
Wu G., Siegler S., Allard P., Kirtley C., Leardini A.,
Rosenbaum D., Whittle M., D'Lima D. D.,
Cristofolini L., Witte H., 2002. ISB recommendation on
definitions of joint coordinate system of various joints
for the reporting of human joint motion--part I: ankle,
hip, and spine. Journal of Biomechanics, 35(4), 543-54.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
168
