
VISUAL TRACKING ON THE GROUND
A Comparative Analysis
Jorge Raul Gomez, Jose J. Guerrero and Elias Herrero-Jaraba
Aragon Institute for Engineering Research, University of Zaragoza, Maria de Luna 1, Zaragoza, Spain
Keywords:
Tracking on the ground, Kalman filter, Homography.
Abstract:
Tracking is an important field in visual surveillance systems. Trackers have been applied traditionally in the
image, but a new concept of tracking has been used gradually, applying the tracking on the ground map of the
surrounding area. The purpose of this article is to compare both alternatives and prove that this new usage
makes possible to obtain a higher performance and a minimization of the projective effects. Moreover, it
provides the concept of multi-camera as a new tool for mobile object tracking in surveillance scenes, because
a common reference system can be defined without increasing complexity. An automatic camera re-calibration
procedure is also proposed, which avoids some practical limitations of the approach.
1 INTRODUCTION
Real-time object tracking is recently becoming more
and more important in the field of video analysis and
processing. Applications like traffic control, user-
computer interaction, on-line video processing and
production and video surveillance need reliable and
economically affordable video tracking tools. In the
last years this topic has received an increasing at-
tention by researchers. However, many of the key
problems are still unsolved. The surveillance track-
ing community in particular has studied target track-
ing techniques for a number of years, mainly in the
context of finding efficient methods to track missiles,
aircrafts etc. and tracking targets of unknown motion.
Their work has been used for a variety of applications.
There have been previous contributions in order
to improve such systems. Tissainayagam and Suter
(Tissainayagam and Suter, 2001) proposed a tracking
method in which a model switching was used. Other
authors, as Isler (Isler et al., 2005), use the technique
of multiple or distributed sensors, assigning sensors
to track targets so as to minimize the expected error in
the resulting estimation for target locations. In most
of the cases, the sensors used for these tasks are inher-
ently limited, and individually incapable of estimating
the target state, and they only can be used for a unique
task. This limitation disappears with the use of cam-
eras. In this way, Lee et al. (Lee et al., 2000) sug-
gested to establish a common coordinate frame and to
capture image signals from several cameras arranged
in a particular environment. This last idea is used in
this paper in order to demonstrate that this solution
contributes a better solution to the tracking problem.
We propose a simple tracker based on the Kalman
Filter. This tracker is used in two different ways (on
the image plane and on the ground plane), making
a comparative between both. Theoretically, the per-
spective effects must disappear in the second one, and
therefore, the tracking must involve better. This paper
shows this event such in laboratory conditions as in
real environments.
This paper is organized as follows: Section 2
briefly details the transformation between the image
and the ground. After that an automatic re-calibration
procedure that avoids some of the practical limitations
of the approach is proposed. Section 3 provides de-
tails of the tracking on the floor, showing the differ-
ent stages of the proposed tracking system: detection,
tracking, uncertainty transformation, and tuning. In
Section 4 we provide our results in a particular envi-
ronment (our laboratory) under stable conditions. Fi-
nally, some results for a more complex environment
(a football match) are shown also in section 4.
45
Raul Gomez J., J. Guerrero J. and Herrero-Jaraba E. (2008).
VISUAL TRACKING ON THE GROUND - A Comparative Analysis.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 45-52
DOI: 10.5220/0001487400450052
Copyright
c
SciTePress
2 FROM IMAGE TO THE
GROUND
In order to transform the coordinates from the image
to the planar ground, a plane projection transforma-
tion is used. At the moment no distortion of the cam-
era lens is assumed. A point in the projective plane
is represented by three coordinates, p = (x
1
,x
2
,x
3
)
T
,
which represents a ray through the origin in the 3D
space (Mundy and Zisserman, 1992). Only the di-
rection of the ray is relevant, so all points written as
λp = (λx
1
,λx
2
,λx
3
)
T
are equivalent. The classical
Cartesian coordinates of the point (x,y) can be ob-
tained intersecting the ray with a special plane per-
pendicular to x
3
axis and located at unit distance along
x
3
. This is equivalent to scale p as, p = (x,y,1)
T
. Pro-
jected points in an image and real points in a planar
ground are both represented in this way.
A projective transformation between two projec-
tive planes (1 and 2) can be represented by a linear
transformation p
2
= T
21
p
1
. If the transformation is
represented in Cartesian coordinates it results non-
linear. Since points and lines are dual in the projec-
tive plane, the transformation for the line coordinates
is also linear, being
T
−1
21
T
the corresponding trans-
formation matrix for lines.
2.1 Computing the Transformation to
Calibrate the Camera
Let it be p
c
= (x
i
,y
i
,1)
T
the coordinates of a point i
in the camera reference system. Let it be (x
g
i
,y
g
i
) the
coordinates of the corresponding point in a reference
system of the planar ground obtained from the plane
of the building, and therefore let it be p
g
= (x
g
i
,y
g
i
,1)
its homogeneous coordinates.
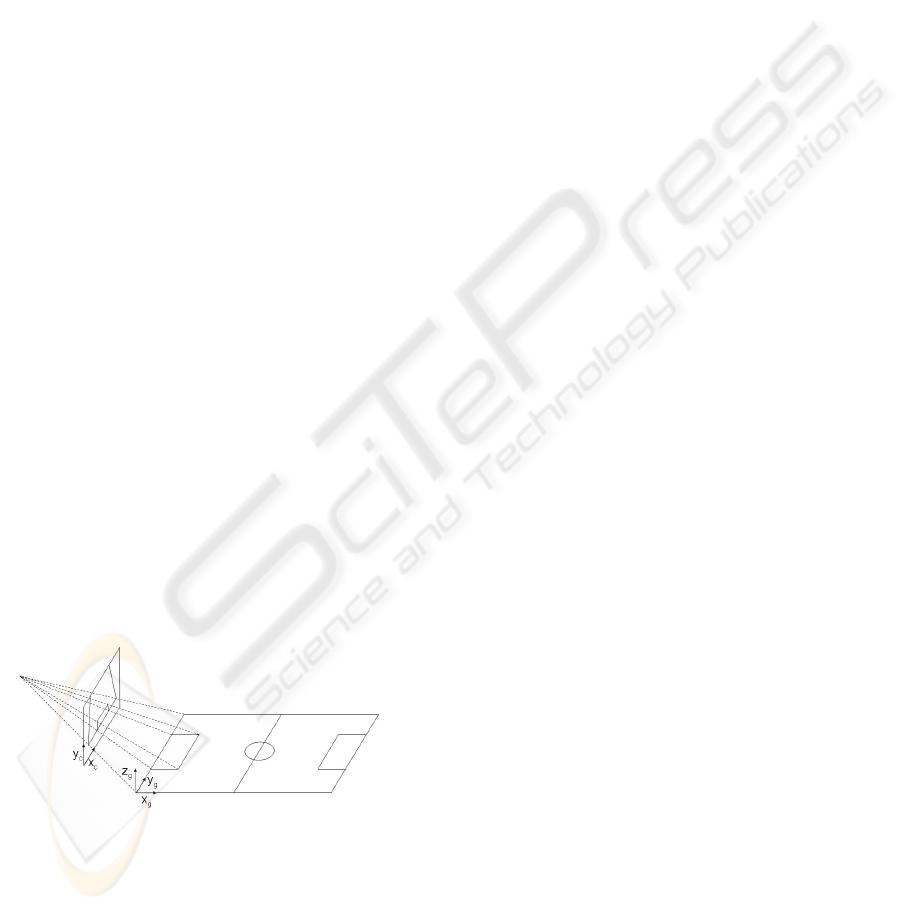
Figure 1: Diagram depicting the transformation of coordi-
nates from image to the ground.
We obtain the projective transformation T
gc
up to
a non-zero scale factor, for points, p
g
= T
gc
p
c
. For
each couple i of corresponding points, two homo-
geneous equations to compute the projective trans-
formation are considered. They can be written as,
(λ
i
x
g
i
,λ
i
y
g
i
,λ
i
)
T
= T
gc
(x
i
,y
i
,1)
T
. Developing them in
function of the elements of the homography matrix,
we have
x
i
y
i
1 0 0 0 −x
g
i
x
i
−x
g
i
y
i
−x
g
i
0 0 0 x
i
y
i
1 −y
g
i
x
i
−y
g
i
y
i
−y
g
i
t =
0
0
where t = (t
11
t
12
t
13
t
21
t
22
t
23
t
31
t
32
t
33
)
T
is a vector
with the elements of the homography matrix T
gc
.
Using four pairs of corresponding points (no three
of them being collinear), we can construct a 8x9 ma-
trix M, where Mt = 0. Then, the solution t corre-
sponds with the eigenvector associated to the least
eigenvalue (in this case the null eigenvalue) of the
matrix M
T
M, which can be easily solved by singu-
lar value decomposition (svd) of matrix M. In order
to have a reliable transformation, more than the min-
imum number of point correspondences must be con-
sidered, solving in a similar way (Hartley and Zisser-
man, 2000).
It is known that a previous normalization of data
is suitable to avoid numerical computation problems
(Hartley, 1997). We have transformed the coordinates
of the points (in the image and in the ground) before
the computation of the homography to reference sys-
tems located in the centroid of the points and scaled
in such that the maximum distance of the points to its
centroid is 1. After computation of the homography,
it is inversely transformed by simple matrix compu-
tation to express the homography in the desired refer-
ence systems.
2.2 Automatic Camera Re-calibration
Once we have calibrated the camera using at least 4
pairs of corresponding points in the image and in the
ground, it cannot be moved, which is the main lim-
itation of this proposal. In practice, due for exam-
ple to the flexibility of the camera support, the ori-
entation of the camera changes. A little change of
orientation has a great influence in the image coor-
dinates of a point, and therefore invalidates previous
calibration. However if the camera is not changed in
position, or position change is small with respect to
the depth of the observed scene, the homography can
be re-calibrated automatically with high robustness
and without 3D computations. As camera position
changes suppose main reconfiguration of the surveil-
lance system, but orientation changes are usual, the
automatic re-calibration procedure presented below
eliminates the limitation in practice. Besides that, this
re-calibration procedure can also be used for changes
in zoom lens or motions in pan-tilt cameras demanded
by the user.
The re-calibration can be made using features ex-
tracted in the image like points and/or lines. We pro-
pose to do it using lines because they are plentiful in
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
46

man made environments and have other advantages.
The straight lines have a simple mathematical repre-
sentation, they can be extracted more accurately than
points being also easier to match them and they can
be used in cases where there are partial occlusions.
After extracting the lines, automatic computa-
tion of correspondences and homographies is car-
ried out, as previously presented in (Guerrero and
Sag
¨
u
´
es, 2003), which uses robust estimation tech-
niques. Thus, initially the extracted lines are matched
to the weighted nearest neighbor using brightness-
based and geometric-based image parameters.
With the coordinates of at least four pairs of cor-
responding lines we can obtain an homography that
transforms both images. As usually we have many
more than four line correspondences, an estimation
method can be used to process all of them, getting bet-
ter results. The least squares method assumes that all
the measures can be interpreted with the same model,
which makes it to be very sensitive to wrong corre-
spondences. The solution is to use robust estimation
techniques which detect the outliers in the computa-
tion. From the existing robust estimation methods,
we have chosen the least median of squares method
(Rousseeuw and Leroy, 1987).
In figure 2 we can see an example of two images
before and after an unexpected camera motion. The
automatic robust matching of lines that allows to com-
pute the camera re-calibration has been superimposed
to the images. The initial matching has about 20% of
wrong correspondences, but the robust computation
of the homography allows to reject wrong matches
and also to search more matches according to it in a
subsequent step. From the line correspondences the
homography to recalibrate the camera is accurately
obtained.
3 TRACKING ON THE GROUND
3.1 Detection and Tracking
A widely used technique for separating moving ob-
jects from their backgrounds is based on background
subtraction (Herrero et al., 2003). In this approach,
an image I
B
(x,y) of the background is stored before
the introduction of a foreground object. Then, given
an image I(x,y) from a sequence, feature detection of
moving objects are restricted to areas of I(x, y) where:
|I(x, y) −I
B
(x,y)| > σ (1)
where σ is a suitable chosen noise threshold.
But this approach exhibits poor results in most real
image sequences due to four main problems:
Figure 2: Two images of a football match before and after
an unexpected camera motion in a real application. The au-
tomatic robust line correspondences has been superimposed
to the images.
• Noise in the image.
• Gray level similarity between background and
moving objects, even if the color is different.
• Continuous or quick illumination changes in the
scene.
• Variation of the static objects in the background.
These problems can be partially solved by an appro-
priate selection of the threshold value. Some authors
(Durucan and Ebrahimi, 2001) (Fabrice Moscheni
and Kunt, 1998) have proposed a region-based motion
segmentation using adaptive thresholding, according
to illumination changes. In addition to this, morpho-
logical filters have to be used to eliminate noisy pix-
els and to fill the moving regions poorly segmented.
However, in spite of these improvements, the results
that can be found in real situations are far away from
a satisfactory solution.
To detect the moving objects, we present an ap-
VISUAL TRACKING ON THE GROUND - A Comparative Analysis
47

proach in motion detection, based on difference, in-
troducing two procedures, Neighborhood-Based De-
tection and Overlapping-Based Labelling, in order to
obtain a more robust segmentation in real scenes. The
first one uses a local convolution mask, instead of
a punctual one, to compute difference and obtain a
more reliable difference image. The second one uses
an overlapping criterion between two difference im-
age to classify blobs in two different types: static or
dynamic. This last characteristic makes a distinction
between moving objects and shadows or illumination
changes.
After the motion detection, a Kalman tracker
(Kalman, 1960) with a constant velocity model (Bar-
Shalom and Fortmann, 1988) is used for tracking, us-
ing the center of each detected object as measure data.
Internally, the tracker has a state with 4 elements: 2
for the position and 2 for the velocity.
The Kalman filter is divided in two main parts:
prediction and estimation. Between them, a match-
ing procedure associates the measures obtained in the
motion detection with the prediction of the tracking.
It select the nearest-neighbor if it is close enough in
function of the covariance of the innovation.
3.2 Uncertainty Transformation
The measure in the Kalman tracker is the position
(x,y) of the mobile object. The measure noise has
pixel units, but in order to do the tracking in the
ground, it must be transformed according to the ho-
mography to metric units. To transform the covari-
ance matrix from image to ground, as proposed in
(A. Criminisi and Zisserman, 1997), a transformation
in three steps is required: change to homogeneous co-
ordinates, transformation of coordinates from image
to ground and transformation to inhomogeneous co-
ordinates again.
Given a covariance matrix, which express the un-
certainty location in image coordinates:
Λ
2×2
x
c
=
σ
2
x
σ
xy
σ
xy
σ
2
y
(2)
the correspondent homogeneous one is obtained:
Λ
x
c
=
Λ
2×2
x
0
0
>
0
(3)
The change of homogeneous coordinates from im-
age to the ground is made with the homography ma-
trix T
gc
. Therefore, the covariance matrix is trans-
formed as:
Λ
x
g
= T
gc
Λ
x
c
T
>
gc
(4)
Once we have the uncertainty in the ground in ho-
mogeneous coordinates, we need to transform to non-
homogeneous coordinates in order to have the mea-
surement. We will use ∇ f as a first-order approxi-
mation of the relationship between homogeneous and
inhomogeneous coordinates. If X
g
= (X ,Y,W )
>
∇ f = 1/W
2
W 0 −X
0 W −Y
(5)
Therefore, the covariance matrix of the measure-
ments noise in ground coordinates is
Λ
2×2
x
g
= ∇ f Λ
x
g
∇ f
>
(6)
This transformation allows to have a noise model
which considers the influence of the perspective effect
when we made the tracking in the ground.
3.3 Tuning in Practice
The constant velocity model only can be considered
locally valid. In practice, there are velocity changes
that we model in the process noise. If we consider
that the goal have an acceleration which is modelled
as a white noise with zero mean and covariance q
i
, the
state noise matrix Q
i
for each coordinate i = x
g
,y
g
is
(Bar-Shalom and Fortmann, 1988):
Q
i
= q
i
·
"
dt
4
4
dt
3
2
dt
3
2
dt
2
#
(7)
where dt is the time interval.
If we consider the tracker in the ground, the tun-
ing has a well known meaning, because
√
q
i
repre-
sents directly the acceleration of the mobile. On the
other hand, the classical tracker in the image needs
an empirical tuning in pixel units, that depends of the
perspective effect.
The measure noise matrix R is defined in the im-
age for both trackers and transformed to the ground
using the homography matrix for the tracker on the
ground, as seen in section 3.2.
4 EXPERIMENTS
4.1 Description
The objective of these experiments is to compare
the performance of a tracker on the ground versus a
tracker on the image. Two Kalman trackers will be
compared, using the same constant velocity model,
although each one may have a different, but equiva-
lent, tuning, since coordinates in the image and coor-
dinates in the ground represent different magnitudes.
The three first tests performed compare the preci-
sion of the predictions of both trackers in a sequence
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
48

of 550 frames, recorded with a still camera located
in a corridor at 2.5 meters high. The target is a
remote-controlled car moving at nearly constant ve-
locity though a corridor, as it can be seen in fig. 3.
Figure 3: First image of the sequence (up) and building
plane (down) where the tests have been performed. The
remote-controlled car moves along the corridor in the tests,
as the arrow shows.
After obtaining the position of the car in each
frame, a tracker on the image has been applied. At
the same time, the homography previously calculated,
allows us to obtain the corresponding points in the
ground for each point in the image, making possi-
ble to track the same object with another independent
similar tracker on the ground.
To compare the performance of these two track-
ers, the mean difference between the prediction points
and their corresponding measures has been computed.
This difference is only taken into account if the
measure is considered to belong to the object being
tracked. Predictions from these two trackers are go-
ing to be compared at three levels: short, medium and
long-term.
4.2 Comparative Analysis
Test 1: The first test compares the precision of short-
term predictions. In the original sequence, the object
is moving away the camera, with occasional lateral
movements. The sequence will be tested also in re-
verse mode, starting from the last frame to the first,
making the target go towards the camera. Mean dis-
tances obtained between prediction and measures, de-
noted as d
pm
, are shown in table 1. All distances are
measured in the ground, using Euclidean distance.
Table 1: Mean distances in mm. between predictions and
measures for the image tracker and the ground tracker with
the sequence processed forwards and backwards.
d
pm
Image Ground
Forwards 54,90 18,89
Backwards 44,02 20,01
In this first test, a tracking on the ground has a
great advantage over a tracking on the image, since
the effect of the perspective deformation is avoided.
Distances between predictions and measures are rep-
resented in figure 4.
As it can be seen in figure 4, a tracker on the
ground obtains better results if the moving object is
near the camera, because the velocity of the object in
the image is more changeable. However, a tracker on
the image obtains opposite results, since only mea-
sure noise causes this error. In any case, even when
the moving object is far from the camera, the tracker
on the ground obtains better results.
It must be noticed that two kinds of source of noise
could be considered in the measure: one generated in
the detection and other caused by the errors in the ho-
mography. At the moment, this second noise source
has not been modelled, considering that its effect is
small, because all the trajectories are inside the points
used to compute the homography matrix in the cali-
bration phase.
Test 2: To compare the accuracy of medium-term
predictions, another test will be carried out, in the
same sequence, consisting in decimating the num-
ber of measures. After the decimation, we will have
550/ f measures, where f is the decimation factor.
The same values for Q and R are used. Mean dis-
tance d
pm
will be used again to measure the precision
in each case. Obtained results can be seen in table 2,
also in mm.
Mean distances grow as decimation factor in-
creases, since the movement of the object is not totally
predictable. The tracker on the image has an extra er-
ror originated by the deviation in velocity produced
by the perspective effect.
VISUAL TRACKING ON THE GROUND - A Comparative Analysis
49
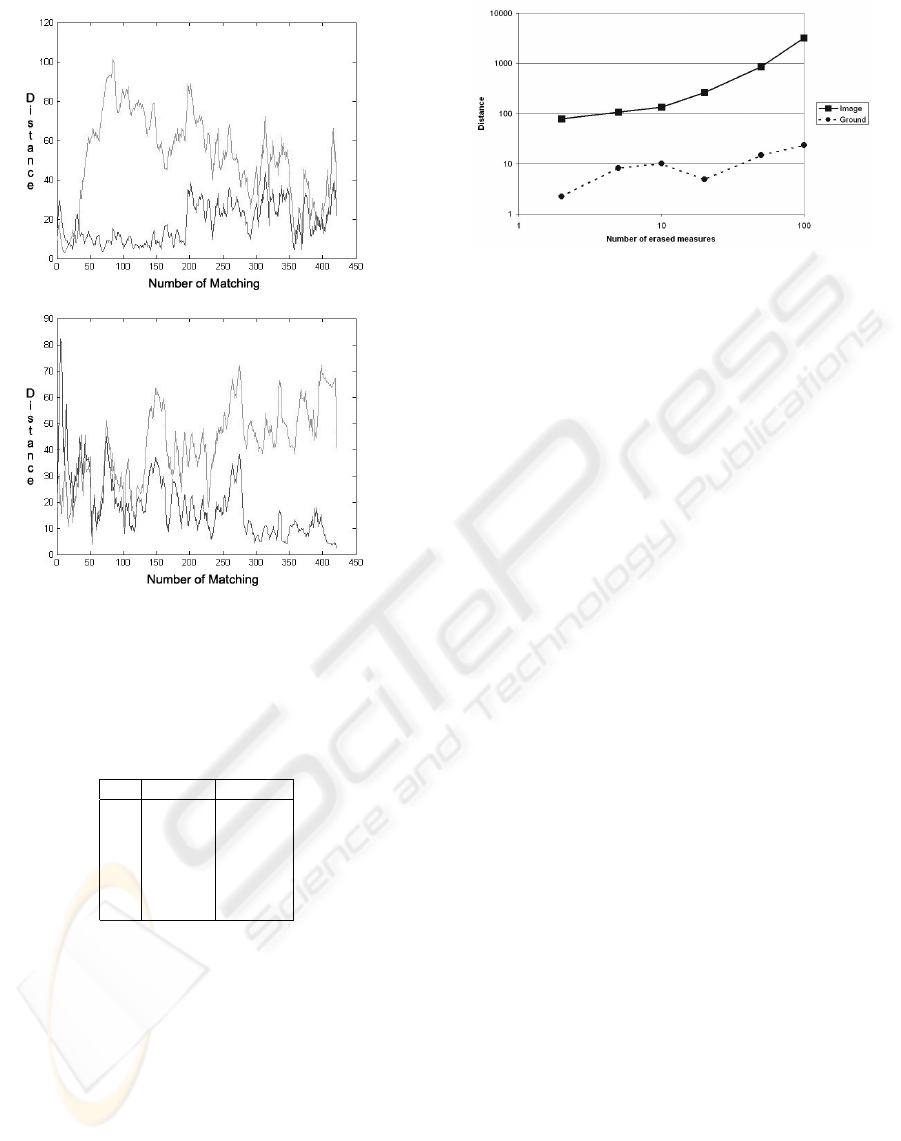
Figure 4: Distance between prediction and measure with
tracking on the ground (dark line) and tracking on the image
(light line). (a) Target moving away the camera (b) Target
moving to the camera.
Table 2: Mean distances in mm. between prediction and
measure applying different grades of decimation.
f Image Ground
1 54,9 18,89
2 78,49 22,89
3 97,75 26,58
5 132,01 31,06
8 180,02 40,33
12 248,08 55,93
Test 3: To test the precision of long-time predic-
tions, a determined number of consecutive measures
will be erased for both trackers. Also the same values
of Q and R are used. This test evaluates the possibil-
ity of recovering the object after an occlusion.
Different numbers of measures have been erased
in each test, from 2 to 100. To measure the accuracy
of each tracker, the distance in the ground between
the measure and the prediction after the erased block
of measures has been used. The results can be seen in
figure 5.
Here the differences between both trackers are
higher. The ground tracker does not lost the measure
Figure 5: Distances obtained after erased blocks of mea-
sures of different lengths (in logarithmic scale).
even after an occlusion of about 100 frames, main-
taining short distances between prediction and mea-
sure. However, the image tracker easily lost the mea-
sure after an occlusion of about 10 frames, giving very
bad predictions.
4.3 Using in Practice
Once tested the superiority of the ground tracker
in the laboratory, it has been confirmed in real-life
videos of a football match . The test consists of a
video sequence, as the frame in figure 6.a, where two
football players are going to be tracked. Both play-
ers are running in parallel trajectories, but at different
distances from the camera. In this test, the necessity
of re-tuning of each trackers when trying to track dif-
ferent objects will be evaluated.
Both trackers will be configured with different
equivalent tunings for the distant player. Using the
homography, we can determine the relationship be-
tween a pixel in the image and the scale of the field
to tune both trackers in a equivalent way. The mea-
sure noise R is fixed, defined for the image tracker,
and translated using the homography matrix for the
ground tracker. This tuning will be used on the nearby
player to check its validity.
The results can be seen on figure 7. As the two
trajectories are not equivalent, and may have differ-
ent accelerations and noises, the results cannot be di-
rectly compared. In any case, the figure shows that the
number of matchings obtained for the distant player is
similar for the two trackers, while the ground tracker
obtains more matchings than the image tracker for the
nearby player using the same tuning.
Although the number of matchings always can be
increased with higher values of the the matrices R and
Q, the prediction error and the possibility of crossing
with other measures would increase as well. Hence,
the application for a ground tracker is more important
if multiple objects are attempted to be tracked.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
50

Figure 6: Frame of the video (up) and plane of the football
field (down) of the video used. The arrows represent the
direction of the players that have been used for the test.
Figure 7: Number of matchings for different state noises.
The two scales are equivalent for the position of the distant
player.
5 CONCLUSIONS
In this paper we compared a tracker on the image
versus a tracker on the ground. A plane projective
transformation allows to make the tracking in real co-
ordinates which facilitates the tuning of the tracker,
gives measures in real coordinates and allows to re-
late different cameras in a common reference system.
Experimental results from laboratory test and from
real environments proved empirically that the tracker
on the ground achieves better results. We have also
shown some preliminary results for the automatic re-
calibration of the camera which avoids some of the
practical limitations of the approach. The continua-
tion of this work will be focused to the usage of mul-
tiple cameras, having the plane of the surroundings as
a common reference for the tracking.
ACKNOWLEDGEMENTS
This work was supported by project OTRI 2005/0388
”UZ - Real Zaragoza - DGA Collaboration Agree-
ment for development of a research project in the
sport performance improvement based on the image
analysis”, and it establishes the grounding for taking
real measures and statistics over the ground.
REFERENCES
A. Criminisi, I. R. and Zisserman, A. (September 1997).
A plane measuring device. In IEEE Transactions on
Pattern Analysis and Machine In Proc. BMVC, UK.
Bar-Shalom, T. and Fortmann, T. (1988). Tracking and
Data Association. Academic Press In.
Durucan, E. and Ebrahimi, T. (October 2001). Change de-
tection and background extraction by linear algebra.
In Proceedings of the IEEE, 89(10):1368-1381.
Fabrice Moscheni, S. B. and Kunt, M. (September 1998).
Spatiotemporal segmentation based on region merg-
ing. In IEEE Transactions on Pattern Analysis and
Machine Intelligence, 20(9):897-915.
Guerrero, J. and Sag
¨
u
´
es, C. (2003). Robust line match-
ing and estimate of homographies simultaneously.
In IbPRIA, Pattern Recognition and Image Analysis,
LNCS 2652, 297–307.
Hartley, R. (1997). In defense of the eight-point algorithm.
In IEEE Trans. on Pattern Analysis and Machine In-
telligence, 19(6):580–593.
Hartley, R. and Zisserman, A. (2000). Multiple View Geom-
etry in Computer Vision. Cambridge University Press,
Cambridge.
Herrero, E., Orrite, C., and Senar, J. (2003). Detected
motion classification with a double-background and a
neighborhood-based difference. In Pattern Recogni-
tion Letters, 24:2079-2092.
Isler, V., Khanna, S., Spletzer, J., and Taylor, C. J. (2005).
Target tracking with distributed sensors: The focus of
attention problem. In Computer Vision and Image Un-
derstanding, 100, 225-247.
Kalman, R. E. (1960). New approach to linear filtering and
prediction problems. In Transactions of the ASME–
Journal of Basic Engineering, Volume 82, Series D,
35-45.
VISUAL TRACKING ON THE GROUND - A Comparative Analysis
51

Lee, L., Romano, R., and Stein, G. (August 2000). Mon-
itoring activities from multiple video streams: Estab-
lishing a common coordinate frame. In IEEE Trans-
actions on Pattern Analysis and Machine Intelligence,
22, n. 8.
Mundy, J. and Zisserman, A. (1992). Geometric Invariance
in Computer Vision. MIT Press, Boston.
Rousseeuw, P. and Leroy, A. (1987). Robust Regression and
Outlier Detection. John Wiley, New York.
Tissainayagam, P. and Suter, D. (2001). Visual tracking
with automatic motion model switching. In Pattern
Recognition, 34, 641-660.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
52
