
PEOPLE TRACKING USING LASER RANGE
SCANNERS AND VISION
Andreas Kr¨außling, Bernd Br¨uggemann, Dirk Schulz
Department of Communication, Information Processing and Ergonomics (FKIE)
Research Establishment for Applied Sciences (FGAN), Neuenahrer Straße 20, 53343 Wachtberg, Germany
Armin B. Cremers
Institute of Computer Science III, University of Bonn, R¨omerstraße 164, 53117 Bonn, Germany
Keywords:
People tracking, crossing targets, laser range scanners, vision, HSV colour space.
Abstract:
Tracking multiple crossing people is a great challenge, since common algorithms tend to loose some of the
persons or to interchange their identities when they get close to each other and split up again. In several
consecutive papers it was possible to develop an algorithm using data from laser range scanners which is able
to track an arbitrary number of crossing people without any loss of track. In this paper we address the problem
of rediscovering the identities of the persons after a crossing. Therefore, a camera system is applied. An
infrared camera detects the people in the observation area and then a charge–coupled device camera is used to
extract the colour information about those people. For the representation of the colour information the HSV
colour space is applied using a histogram. Before the crossing the system learns the mean and the standard
deviation of the colour distribution of each person. After the crossing the system relocates the identities by
comparing the actually measured colour distributions with the distributions learnt before the crossing. Thereby,
a Gaussian distribution of the colour values is assumed. The most probably assignment of the identities is then
found using Munkres’ Hungarian algorithm. It is proven with data from real world experiments that our
approach can reassign the identities of the tracked persons stable after a crossing.
1 INTRODUCTION AND
RELATED WORK
Multi-robot systems and service robots need to coop-
erate with each other and with humans in their envi-
ronments. For this reason, they have to know about
the locations and actions of the objects they want to
interact with. Target tracking deals with the state es-
timation of one or more objects. It is a well stud-
ied topic in the field of aerial surveillance using radar
devices (Bar-Shalom and Fortmann, 1988) and also
in the area of mobile robotics. Here, mainly laser
scanners are used for the purpose of people track-
ing (Prassler et al., 1999; Schulz et al., 2001; Fod
et al., 2002; Romera et al., 2004; Zhao and Shibasaki,
2005; Bellotto and Hu, 2007). Due to the high resolu-
tion of laser scanners, which mostly cover a 180 de-
gree field of view with 180 or 360 measurements, one
target is usually the source of multiple returns within
one laser scan. This conflicts with the assumption of
punctiform targets used in the field of radar tracking.
There, each target is the origin of exactly one mea-
surement. In contrast to that, using laser scanners, one
needs to be able to assign the obtained measurements
to extended targets.
A second important characteristic of tracking in
the field of mobile robotics is the occurrence of cross-
ing or interacting targets, for example two or more
persons getting close to each other, so that they can
no longer be distinguished by common tracking algo-
rithms (Fortmann et al., 1983; Kr¨außling et al., 2005;
Kr¨außling et al., 2007). In this article we present an
approach to deal with this particular problem. The
key idea of our approach is to adopt an algorithm for
tracking punctiform objects in clutter,known from the
radar community, for the purpose of reliably tracking
extended objects with laser scanners. Several differ-
ent methods for tracking punctiform crossing targets
in clutter, i.e. tracking in the presence of false alarm
measurements close to a target, have been developed
over the last decades:
1. the MHT (Multi Hypothesis Tracker) introduced
29
Kräußling A., Brüggemann B., Schulz D. and B. Cremers A. (2008).
PEOPLE TRACKING USING LASER RANGE SCANNERS AND VISION.
In Proceedings of the Fifth International Conference on Informatics in Control, Automation and Robotics - RA, pages 29-36
DOI: 10.5220/0001482700290036
Copyright
c
SciTePress

by Reid in 1979 (Reid, 1979).
2. The JPDAF (Joint Probabilistic Data Association
Filter) introduced by Fortmann, Bar–Shalom and
Scheffe in 1983 (Fortmann et al., 1983).
These techniques can easily be extended to tracking
extended objects as well, but there are several reasons,
why such approaches are brittle:
• In most cases there are several measurements
from the same target.
• Interacting objects might be indistinguishable
over longer periods of time.
• Some of the objects might be occluded for some
time.
• The objects can carry out abrupt manoeuvres, es-
pecially when they are crossing their paths.
These difficulties are well known in the mobile
robotics community:
• Tracking moving objects whose trajectories cross
each other is a very general problem ... Problems
of this type cannot be eliminated even by more
sophisticated methods ... (Prassler et al., 1999).
• Tracks are lost when people walk too closely to-
gether ... (Schumitch et al., 2006).
Due to these reasons, we have developed methods for
tracking interacting people in laser data (Kr¨außling
et al., 2004b; Kr¨außling et al., 2005; Kr¨außling et al.,
2007). These methods have in common, that they
employ a variant of the well known Viterbi algo-
rithm (Viterbi, 1967; Forney Jr., 1973) in combina-
tion with geometrical properties of the people track-
ing problem, in order to achieve a high degree of ro-
bustness against track loss.
However, although the tracks are very rarely lost
by these algorithms, they tend to confuse the assign-
ment of the tracks to the individual persons being
tracked after a crossing of paths has occurred. This
happens because the distance measurements of the
laser scanners do not provide direct information about
the persons’ identities. For this reason, additional
cues are required, if we want to reliably distinguish
between persons. Possible cues are:
1. Different colours and surface-textures of the pairs
of trousers people wear might result in different
intensities of the reflected laser beams.
2. Ultrasound or infrared signals uniquely identify-
ing individuals, which are transmitted by spe-
cial active badges the people wear (Schulz et al.,
2003).
3. Different colours of the clothes people wear. This
information can be exploited for the identification
of the people using a camera network.
4. Differences in physiognomy like size and built of
persons. These differences can again be detected
using cameras (Schulz, 2006).
In this article we propose a technique to com-
bine Viterbi-based tracking with person identification
based on colour information. A calibrated setup con-
sisting of an infrared and a CCD camera is used to
learn colour histograms of the persons, while they
are well separated during tracking. This information
is then employed to correctly reassign person IDs to
tracks after interactions have occurred. The new as-
signments are determined using the Hungarian algo-
rithm, which computes the maximum likelihood as-
signment, based on the likelihood of colour observa-
tions. Our experiments show that this approach al-
lows to track several interacting humans without loss
of track and without accidental confusion of the track
assignments.
The remainder of this paper is organised as fol-
lows. In Section 2 the combined method for track-
ing multiple interacting persons is described. It con-
sists of the tracking method based on the Viterbi al-
gorithm and an identity assignment method based on
colour information. Section 3 presents experiments il-
lustrating the robustness of our approach against loss
of track as well as against errors in track assignment.
We conclude in Section 4.
2 THE METHOD
In order to reliably keep track of several interacting
persons, we have to solve two problems: the trajecto-
ries of the persons have to be estimated without loos-
ing track of the persons and we have to make sure, that
we can always assign the individual trajectories to the
correct person. We have developed the so called Clus-
ter Sorting algorithm (CSA) to solve the first problem
(Kr¨außling, 2006b). The CSA uses data from laser
range scanners to estimate the trajectories of objects
over time. The second problem is then solved by
additionally using colour histograms extracted from
camera images, in order to compute the most likely
assignment of the trajectories to the persons being
tracked. In the following, we will first explain the
CSA in detail. Afterwards we will describe how the
reassignment of tracks based on colour information
can be integrated into the approach.
The Cluster Sorting algorithm estimates multi-
ple trajectories using a hidden Gauß–Markov chain,
where the tracking process is carried out using
Kalman filters. Because laser range scanners re-
turn range measurements to any object in the sur-
rounding of the robot, the measurements originating
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
30

from persons have to be discriminated from measure-
ments of static objects. The CSA computes valida-
tion gates (Bar-Shalom and Fortmann, 1988) for this
purpose, i.e. only measurements, which are close to
the currently estimated positions of persons are be-
ing considered; we call those measurements the se-
lected measurements. The distinction between mea-
surements of different persons is possible based on
the distance between selected measurements, as long
as persons do not get close to each other; otherwise,
persons share selected measurements. For this reason,
the CSA deals with the selected measurements in two
different ways:
(1) as long as the measurements of persons are
well separated, it computes for each person the un-
weighted mean of all the selected measurements of
that person. These means are then used to update the
Kalman filters for the individual trajectories of each
person; we call this procedure the Kalman Filter Al-
gorithm (KFA). It has been shown in (Kr¨außling et al.,
2005; Kr¨außling, 2006a) to be very fast and to provide
good information about the position of the targets, but
it cannot reproduce multi-modal probability distribu-
tions. Thus it is not able to handle multiple interacting
people.
(2) When persons have selected measurements in
common, the CSA no longer computes one single
track for each person, but it starts to compute indi-
vidual tracks for each selected measurement of each
person using a variant of the Viterbi algorithm. The
algorithm calculates for every old selected measure-
ment a separate position estimate and validation gate.
The new selected measurements are the ones which
lie in at least one of those gates; we call this al-
gorithm Viterbi-based algorithm (VBA); it has been
introduced in (Kr¨außling et al., 2004a). The algo-
rithm allows to represent multi-modal probability dis-
tributions to some extend, which is a major advan-
tage when dealing with multiple interacting targets.
The VBA is much more robust against track loss,
when compared to the KFA, because the VBA main-
tains several hypotheses about a persons position, one
hypothesis for each gating measurement. Common
tracking algorithms like the KFA, in contrast, make a
hard decision which measurement they use. In diffi-
cult situations, they tend to assign the same measure-
ment to several objects. Algorithms with a random
component like the SJPDAF (Schulz et al., 2001) oc-
casionally choose for each track the path of a differ-
ent person, so that no persons gets lost. But this be-
haviour is not stable (Kr¨außling and Schulz, 2006).
It remains to describe, how the CSA actually de-
cides when to switch between the KFA and the VBA.
The Cluster Sorting algorithm uses two classes of ob-
jects:
• single targets.
• clusters, which represent at least two interacting
persons, i.e. humans that are moving very close to
each other.
Single targets are tracked with the KFA, since there
is no need for representing multi-modal probability
distributions. Clusters are tracked with the VBA,
since multi-modal distributions have to be repre-
sented. This approach guarantees that none of the ob-
jects that are associated with the cluster is lost. This
fact is important especially when the objects split and
start to move separately again.
Three different events have to be regarded when
tracking multiple interacting people:
1. The merging of two single persons. This means
that two single targets get very close to each other.
This is the case, if at least one measurement is lo-
cated in the validation gates of both targets. Then
the algorithm stops to track the two single targets
with the KFA and starts tracking a cluster, which
contains both targets, using the VBA. Therefore,
it uses the measurements located in the validation
gates of at least one target.
2. The merging of a single human and a cluster. This
means that a single person and a cluster get very
close to each other. This happens, if at least one
measurement is located in the validation gates of
the person and the cluster. In this case the al-
gorithm stops to track the single human and the
cluster separately. Instead it starts tracking a com-
bined cluster. Therefore, it uses the measurements
located in the validation gates of either the single
target or the previously considered cluster or both.
3. The merging of two clusters. This means that two
clusters get very close to each other. This is the
case, if at least one measurement is located in the
validation gates of both clusters. If this is true, the
algorithm stops to track the two clusters and starts
tracking a combined cluster. Therefore, it uses the
measurements located in the validation gates of at
least one of the previously considered clusters.
Note, that whenever a merging takes place, the algo-
rithm remembers the humans which correspond to the
newly combined cluster.
For each tracked cluster, we also have to decide,
if it has split into single person tracks again. Whether
clusters are split depends on three conditions:
1. The position estimates corresponding to the mea-
surements in the validation gates are separated
into subclusters. For this purpose, we select the
first estimate, which then is associated with the
PEOPLE TRACKING USING LASER RANGE SCANNERS AND VISION
31

first subcluster. For all other estimates associated
with the cluster, the Euclidean distance to the first
estimate is calculated. If this distance is below a
certain threshold, the estimate is associated with
the first subcluster. In our experiments, we set
the threshold to 150cm, which corresponds to the
maximum distance between the legs of a walking
person. We then have to consider the estimates,
for which the Euclidean distance to the first sub-
cluster exceeds this manually chosen threshold.
Using the same procedure we applied for build-
ing the first subcluster, we now construct sub-
clusters until all estimates are associated with one
of these smaller clusters. If the number of sub-
clusters equals the number of humans which were
merged into this cluster, the first condition for the
dispersion of the cluster is fulfilled. Then, we pro-
ceed with step 2.
2. We now check the pairwise distance between the
subclusters. If the distance is above a manually
chosen bound, we regard these clusters as sepa-
rated. We choose the value of that bound to be
300cm. The second condition is fulfilled, if the
number of pairs of separated subclusters equals
n(n−1)
2
. Thereby, n is the number of single per-
sons associated with the cluster. Hence, we are
checking if all subclusters are pairwise separated.
3. Above this, we can separate single subclusters
from the cluster to indicate them in the graphics.
This follows the same logic as in step 1. Note,
the algorithm is not able to determine, how many
targets are represented by a single subcluster.
If conditions 1 and 2 are met, the n subclusters are
associated with the n single targets therefrom tracked
by the KFA. When separating targets from clusters,
we cannot guarantee if the target association is the
same as before merging the targets into the cluster.
Thus, a possible solution to this problem, which uses
colour information will now be proposed.
To obtain the colour information of the persons, a
charge–coupleddevice camera (CCD camera) is used.
In order to recognise which parts of the picture of
the CCD camera belong to the persons, we employ
an infrared camera. The two cameras are mounted in
parallel on the robot, with only a small displacement;
this allows us to easily correlate infrared and CCD
images. The setup is shown in Figure 1. Since the
temperature of the persons is in a small, well defined
range, it is easy to identify the regions in the images
of the CCD camera which originate from humans.
Next, the persons which are detected by the camera
system have to be assigned to the persons which are
tracked by the laser scanners and the tracking algo-
Table 1: The values of the hue in the HSV colour space.
Hue red yellow green cyan blue magenta
Degrees 0 60 120 180 240 300
Figure 1: The robot equipped with the laser scanners and
the cameras.
rithm. For this purpose, we exploit the fact that the
camera system enumerates the persons in clockwise
direction. Therefore, we arrange the persons tracked
by the tracking algorithm in clockwise direction, too.
The colour information from the CCD camera is
represented using the HSV colour space (Gonzalez
and Woods, 1992), where H stands for hue, S for sat-
uration and V for value. In our experiments we only
used the hue, because it is fairly independent from
the illumination and a stable characteristic of the per-
sons. The hue values range from 0 to 360 degrees.
The mapping between the values of the hue and six
basic colours, we use for identification, is shown in
Table 1.
The colour characteristics are learnt during the ex-
periment before the crossings. We assume that the av-
erage relative frequencies of the hue for person i fol-
low a Gaussian distribution with mean µ
i
and variance
Σ
i
. Let µ
i,k
and Σ
i,k
be the learnt mean and the learnt
variance at time step k and let y
i,k
be the measurement
corresponding to person i at time step k,
µ
i,k
=
∑
k
j=1
y
i, j
k
, (1)
Σ
i,k
=
∑
k
j=1
(y
i, j
− µ
i,k
)(y
i, j
− µ
i,k
)
⊤
k− 1
. (2)
This mean and this variance can be learnt on–line
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
32
without storing previous values y
i,l
, l < k, according
to
∆
k+1
= µ
i,k+1
− µ
i,k
(3)
µ
i,k+1
=
k
k+ 1
µ
i,k
+
y
i,k+1
k+ 1
(4)
Σ
i,k+1
=
(y
i,k+1
− µ
i,k+1
)(y
i,k+1
− µ
i,k+1
)
⊤
k
+
+
k− 1
k
Σ
i,k
+ ∆
k+1
∆
⊤
k+1
. (5)
As soon as the tracking algorithm detects a crossing,
the algorithm stops to learn the colour characteristics
and the actual values µ
i,k
and Σ
i,k
are assigned to the
persons as the characteristics µ
i
and Σ
i
. As soon as
the tracking algorithm detects the end of the crossing,
the algorithm reassigns the identities to the persons. If
y
j,k
is the measurement of the person that is assigned
to track j at time step k, then the probability p
i, j,k
, that
the track j at time step k belongs to the person, which
has been assigned the identity i before the crossing, is
p
i, j,k
=
1
(det(2πΣ
i
))
1/2
·
·exp
−
1
2
y
j,k
− µ
i
⊤
Σ
−1
i
y
j,k
− µ
i
. (6)
Because the colour measurements of different points
in time are independent, the probability p
i, j,k
1
:k
2
, that
the track j from time step k
1
to time step k
2
originates
from person i is
p
i, j,k
1
:k
2
=
k
2
∏
k=k
1
p
i, j,k
. (7)
The tracks j, which are calculated by the tracking al-
gorithm, are usually interchanged during a crossing.
Thus, let m be the total number of persons associated
with the cluster being split and let σ be a permuta-
tion of the person IDs 1,. . . ,m. Then, the probability
that the IDs have been interchanged during the cross-
ing according to the permutation σ giventhe measure-
ments from time step k
1
to time step k
2
is
Π
σ
=
m
∏
l=1
p
l,σ(l),k
1
:k
2
. (8)
The best reassignment
ˆ
σ of the tracks j to the learnt
persons i is the one, that maximises the probability
Π
σ
. To compute
ˆ
σ we interpret the negative log-
likelihoods log
p
i, j,k
1
:k
2
as the marginal assignment
costs of assigning track j to person i after a cross-
ing. The negative log-likelihoods log(Π
σ
) then con-
stitute the assignment cost of a complete assignment
(permutation) σ. The minimum cost assignment
ˆ
σ is
then calculated using the well known Hungarian algo-
rithm (Munkres, 1957).
0 60 120 180 240 300 360
0
0.2
0.4
0.6
0.8
1
1.2
colour distibution of the three persons
Colors in Degrees
relative frequency of the color pixels
person 1
person 3
person 2
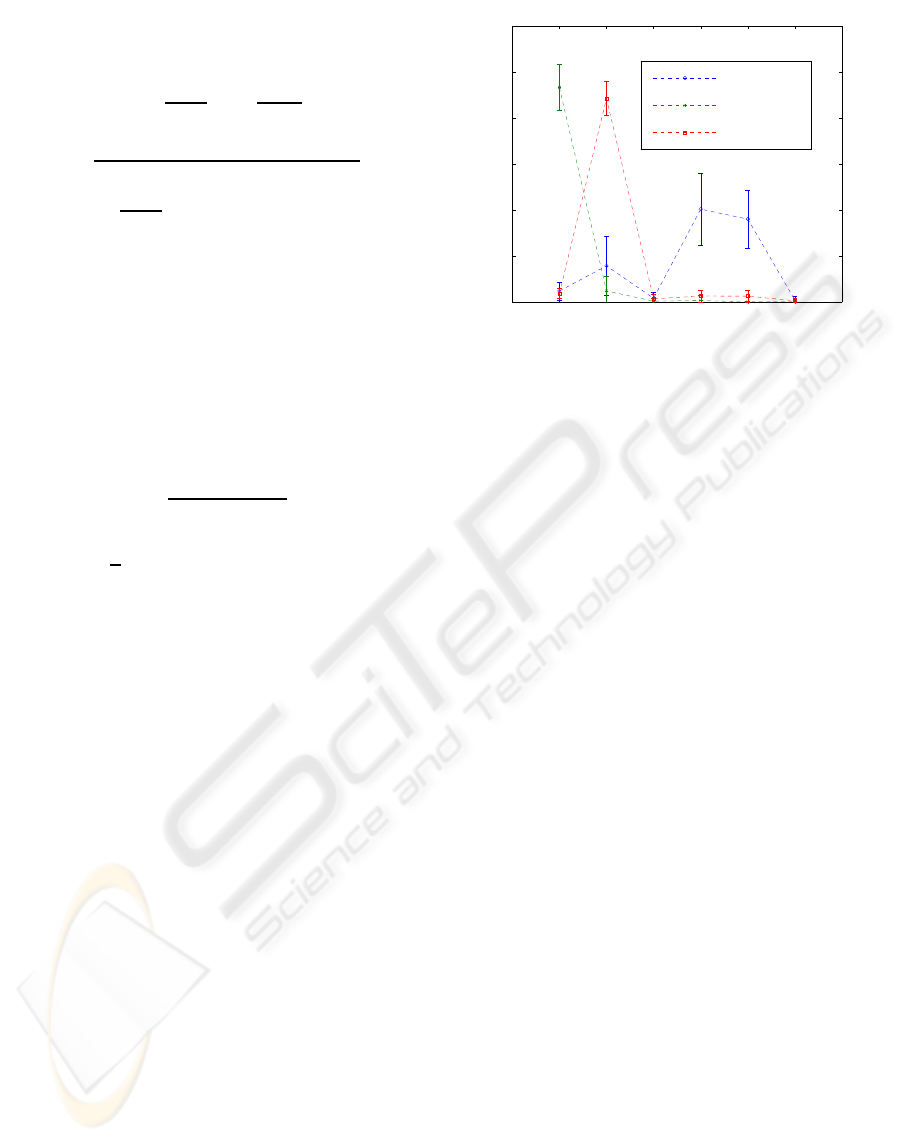
Figure 2: Colour distributions of the three subjects.
3 EXPERIMENTS
We conducted experiments with three persons in a
real world scenario in our laboratory. The first per-
son was wearing a blue cardigan and a blue pair of
trousers. The second person was wearing a yellow
cardigan and blue pair of trousers. The third person
was wearing a red shirt and a red pair of trousers.
Figure 2 shows the corresponding colour distribu-
tions. The first subject has his maximum in the blue
domain, the second has it in the yellow domain and
the third in the red one. Thus, the measured colour
distributions show a good coincidence with the real
colours.
The experiments were accomplished with a B21
robot platform shown in Figure 1. On the top the
camera system is mounted. The left camera is the in-
frared camera and the right camera is the CCD cam-
era. There are two laser range scanners armed back to
back at the robot, so that there is a 360 degree field of
view.
The number of possible permutations of three ob-
jects is 3! = 6. Thus, we conducted six experiments,
for each permutation one experiment. We defined po-
sition 1 as the right upper part of the surveillance area,
position 2 as the left upper part of the surveillance
area and position 3 as the lower middle part. The
persons are indexed in the order they appear in the
surveillance area. In the six experiments the person
indexed 1 occupied position 1 before the crossing, the
person indexed 2 occupied position 2 and the person
indexed 3 occupied position 3. After the crossing they
occupied different positions corresponding to the six
possible permutations. The experiment for the per-
mutation 123 7→ 123 is described in detail.
At first the three persons are occupying their start
PEOPLE TRACKING USING LASER RANGE SCANNERS AND VISION
33
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
time: 105
1
2
3
x−coordinate in cm
y−coordinate in cm
three subjects, permutation 123
before the
interaction
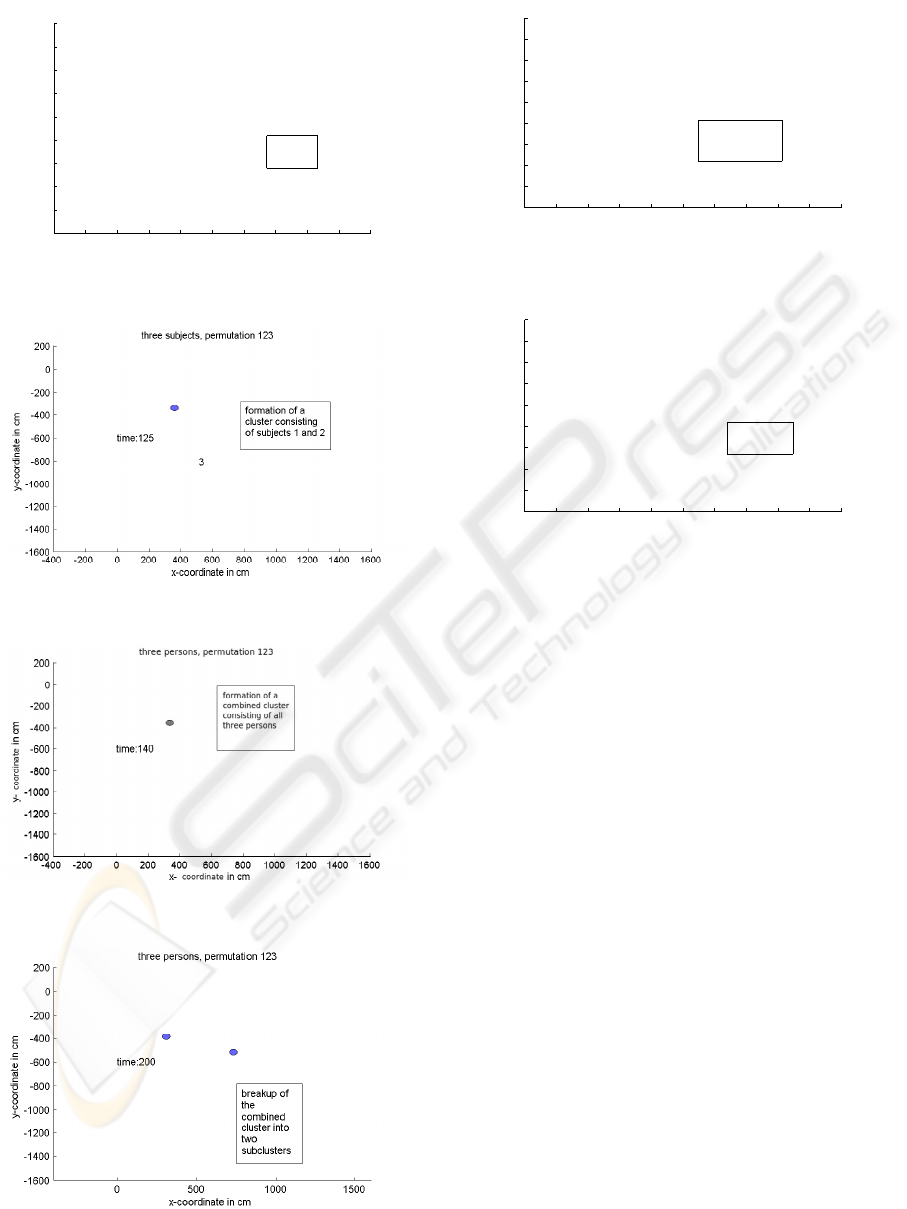
Figure 3: Three subjects before the crossing, permutation
123 7→ 123.
Figure 4: Formation of a cluster consisting of person 1 and
2, permutation 123 7→ 123.
Figure 5: Formation of a cluster consisting of all three per-
sons, permutation 123 7→ 123.
Figure 6: Disaggregation of the combined cluster into two
subclusters, permutation 123 7→ 123.
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
time: 220
1
2
3
x−coordinate in cm
y−coordinate in cm
three subjects, permutation 123
three single
subjects after
the interaction
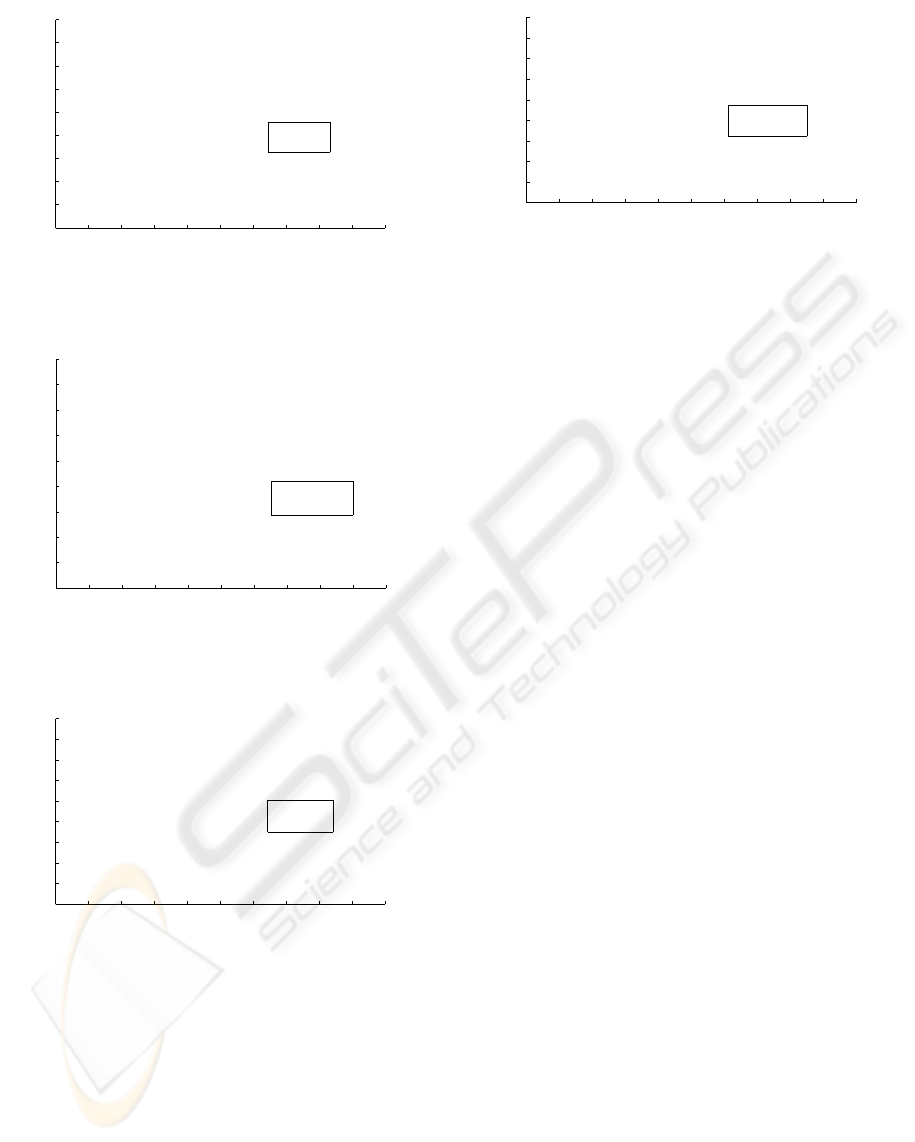
Figure 7: Three persons after the crossing, permutation
123 7→ 123.
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
time: 110
1
2
3
x−coordinate in cm
y−coordinate in cm
three subjects, permutation 213 to 123
before the
interaction
Figure 8: Three persons before the crossing, permutation
213 7→ 123.
positions and are indexed in the order of their appear-
ance in the surveillance area; this is illustrated in Fig-
ure 3. Within this figure, the numbers corresponding
to a person are drawn at the location computed by the
tracking algorithm. In Figure 4 the persons 1 and 2
interact and merge into a cluster. The clusters are rep-
resented by ellipses within the figure. In the next step
person 3 joins the other two and the algorithm merges
them into a single cluster as shown in Figure 5. Af-
ter some time, the group splits up into two subclusters
(see Figure 6), and finally the three persons walk on
their own again. This situation is illustrated in Fig-
ure 7. As can be seen, the algorithm tracks the three
persons without loss of track and reassigns the identi-
ties correctly after the interaction.
Next, we investigated the question, whether the
algorithm still works well, when the starting posi-
tions are interchanged. For this purpose we used the
permutation 213 7→ 123, which means for instance,
that the initial position of person number 2 is posi-
tion number 1. Figures 8 and 9 show the starting and
the end positions respectively with the assigned iden-
tities. Obviously the identities are in this case also
reassigned correctly.
Finally, we examined the case, whether the algo-
rithm can deal with several consecutive permutations.
Therefore, we used the two consecutive permutations
123 7→ 213 and 213 7→ 231. Figure 10 shows the ini-
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
34
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
time: 230
1
2
3
x−coordinate in cm
y−coordinate in cm
three subjects, permutation 213 to 123
after the
interaction
Figure 9: Three persons after the crossing, permutation
213 7→ 123.
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
time: 85
1
2
3
x−coordinate in cm
y−coordinate in cm
three subjects, permutation 123 to 213 to 231
before the first
interaction
Figure 10: Three persons before the first crossing, permuta-
tion 123 7→ 213 7→ 231.
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
time: 205
2
1
3
x−coordinate in cm
y−coordinate in cm
three subjects, permutation 123 to 213 to 231
after the first
interaction
Figure 11: Three persons after the first crossing, permuta-
tion 123 7→ 213 7→ 231.
tial positions. Figure 11 shows the reassigned iden-
tities after the first crossing and Figure 12 shows the
reassigned identities after the second crossing. It can
easily be recognised that the identities are reassigned
correctly after each crossing.
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
−400 −200 0 200 400 600 800 1000 1200 1400 1600
−1600
−1400
−1200
−1000
−800
−600
−400
−200
0
200
time: 350
2
3
1
x−coordinate in cm
y−coordinate in cm
three subjects, permutation 123 to 213 to 231
after the second
interaction
Figure 12: Three persons after the second crossing, permu-
tation 123 7→ 213 7→ 231.
4 CONCLUSIONS
In this article we investigated the problem of tracking
multiple interacting humans. There are two difficul-
ties, which have to be addressed to solve this chal-
lenging problem:
1. The robot should not loose track of a person and
2. the robot should always assign the correct identity
to the individual persons, especially after a group
of interacting persons split.
We proposed a hybrid approach to solve these two
problems, a laser-based tracking approach is applied
to keep track of the trajectories of persons, and colour
information about the persons’ clothes is employed to
disambiguate between the persons being tracked.
The proposed tracking algorithm reliably keeps
track of several persons, even in very difficult situa-
tions, like the crossing of tracks and interactions of
persons. Robustness against track loss is achieved
by applying a switching approach, where a simple
Kalman filter is used as long as tracks are well sep-
arated and a variant of the Viterbi algorithm, which
tracks individual laser measurements independently,
takes over as soon as persons get close to each other.
A clustering technique is then employed to assign the
measurement tracks to individual person tracks again,
when the persons split up again.
However, during the Viterbi phase, the assignment
of the persons identities to tracks is lost. For this rea-
son, we employ the camera information to correctly
reassign the persons IDs to the individual tracks af-
ter the crossing. The current implementation uses a
combination of an infrared and a CCD camera for this
purpose. The camera system provides the robot with
colour information about the tracked persons. The
most likely assignment of the identities is then found
by using the Hungarian algorithm.
Our experiments show that this approach is able
to reliably track multiple interacting persons without
PEOPLE TRACKING USING LASER RANGE SCANNERS AND VISION
35

interchanging the individual tracks even in challeng-
ing situations. But of course there are still possibil-
ities for future research. The approach will run into
problems, if the colour distributions of the peoples’
clothes become too similar. This could be remedied
by additionally taking size and shape information into
account, like in (Schulz, 2006). In rare situations it is
also still possible that the tracking algorithm looses
track of an individual person, e.g. if a human moves
away while it is in the shadow of the other persons
during a crossing. This drawback could be overcome
by coordinating a team of robots in order to keep full
coverage of the scene.
REFERENCES
Bar-Shalom, Y. and Fortmann, T. (1988). Tracking and
Data Association. Academic Press.
Bellotto, N. and Hu, H. (2007). People tracking with a mo-
bile robot: A comparison of Kalman and particle fil-
ters. In Proceedings of the 13th IASTED International
Conference on Robotics and Applications, pages 388–
393. International Association of Science and Tech-
nology for Development.
Fod, A., Howard, A., and Mataric, M. J. (2002). Laser–
based people tracking. In Proceedings of the IEEE
International Conference on Robotics and Automation
(ICRA), pages 3024–3029.
Forney Jr., G. D. (1973). The Viterbi algorithm. Proceed-
ings of the IEEE, 61(3):268–278.
Fortmann, T. E., Bar-Shalom, Y., and Scheffe, M. (1983).
Sonar tracking of multiple targets using joint prob-
abilistic data association. IEEE Journal of Oceanic
Engineering, 8(3).
Gonzalez, R. C. and Woods, R. E. (1992). Digitale Image
Processing. Addison–Wesley.
Kr¨außling, A. (2006a). Tracking extended moving objects
with a mobile robot. In Proceedings of the 3rd IEEE
Conference on Intelligent Systems, also to be pub-
lished in the Post Conference Volume (IEEE IS–06):
Intelligent Techniques and Tools for Novel System Ar-
chitectures, Series: Studies of Computational Intelli-
gence, Springer.
Kr¨außling, A. (2006b). Tracking multiple objects using the
Viterbi algorithm. In Proceedings of the 3rd Inter-
national Conference on Informatics in Control, Au-
tomation and Robotics (ICINCO), also to be published
in the Springer book of best papers of ICINCO 2006,
pages 18–25.
Kr¨außling, A., Schneider, F. E., and Wildermuth, D.
(2004a). Tracking expanded objects using the Viterbi
algorithm. In Proceedings of the 2nd IEEE Confer-
ence on Intelligent Systems.
Kr¨außling, A., Schneider, F. E., and Wildermuth, D.
(2004b). Tracking of extended crossing objects us-
ing the Viterbi algorithm. In Proceedings of the 1st
International Conference on Informatics in Control,
Automation and Robotics (ICINCO), pages 142–149.
Kr¨außling, A., Schneider, F. E., and Wildermuth, D. (2005).
A switching algorithm for tracking extended targets.
In Proceedings of the 2nd International Conference
on Informatics in Control, Automation and Robotics
(ICINCO), pages 126–133.
Kr¨außling, A., Schneider, F. E., Wildermuth, D., and Se-
hestedt, S. (2007). A switching algorithm for tracking
extended targets, volume II, pages 117–128. Springer,
informatics in control, automation and robotics edi-
tion.
Kr¨außling, A. and Schulz, D. (2006). Tracking extended
targets — a switching algorithm versus the SJPDAF.
In Proceedings of the 9th IEEE International Confer-
ence on Information Fusion, CD–ROM.
Munkres, J. (1957). Algorithms for assignement and trans-
portation problems. Journal of the Society for Indus-
trial and Applied Mathematics, 5(1).
Prassler, E., Scholz, J., and Elfes, E. (1999). Tracking
people in a railway station during rush–hour, volume
1542, pages 162–179. Springer Lecture Notes, com-
puter vision systems edition.
Reid, D. B. (1979). An algorithm for tracking multiple tar-
gets. IEEE Trans. Automatic Control, 24:843–854.
Romera, M. M., Vazquez, M. A. S., and Garcia, J. C. G.
(2004). Tracking multiple and dynamic objects with
an extended particle filter and an adapted k–means
clustering algorithm. In Proceedings of the 5th
IFAC/EURON Symposium on Intelligent Autonomous
Vehicles, CD–ROM.
Schulz, D. (2006). A probabilistic exemplar approach to
combine laser and vision for person tracking. In Pro-
ceedings of Robotics: Science and Systems II.
Schulz, D., Burgard, W., Fox, D., and Cremers, A. B.
(2001). Tracking multiple moving objects with a mo-
bile robot. In Proceedings of the IEEE Computer
Society Conference on Computer Vision and Pattern
Recognition (CVPR).
Schulz, D., Fox, D., and Hightower, J. (2003). People
tracking with anonymous and ID–sensors using Rao–
Blackwellised particle filters. In Proceedings of the
18th International Joint Conference on Artificial In-
telligence (IJCAI).
Schumitch, B., Thrun, S., Bradski, G., and Olukotun, K.
(2006). The information–form data association filter.
In Proceedings of the 2005 Conference on Neural In-
formation Processing Systems (NIPS). MIT Press.
Viterbi, A. J. (1967). Error bounds for convolutional codes
and an asymptotically optimum decoding algorithm.
IEEE Transactions on Information Theory, 13(2).
Zhao, H. and Shibasaki, R. (2005). A novel system for
tracking pedestrians using multiple single–row laser–
range scanners. IEEE Transactions on Systems, Man
and Cybernetics —- Part A: Systems and Humans,
35(2):283–291.
ICINCO 2008 - International Conference on Informatics in Control, Automation and Robotics
36
