
OBJECTIVE QUALITY SELECTION FOR HYBRID LOD MODELS
Tom Jehaes, Wim Lamotte
Hasselt University, Expertise Centre for Digital Media
Interdisciplinary institute for BroadBand Technology (IBBT)
Wetenschapspark 2, 3590 Diepenbeek, Belgium
Nicolaas Tack
IMEC, Kapeldreef 75, 3001 Leuven, Belgium
Keywords:
Progressive Geometry, Image-Based Rendering, Level-of-Detail, Objective Quality Selection.
Abstract:
The problem of rendering large virtual 3D environments at interactive framerates has traditionally been solved
by using polygonal Level-of-Detail (LoD) techniques, for which either a series of discrete models or one pro-
gressive model were determined during preprocessing. At runtime, several metrics such as distance, projection
size and scene importance are used to scale the objects to such a resolution that a target framerate is maintained
in order to provide a satisfactory user experience. In recent years however, image-based techniques have re-
ceived a lot of interest from the research community because of their ability to represent complex models in a
compact way, thereby also decreasing the time needed for rendering. One of the questions however that should
be given some more consideration is when to switch from polygonal rendering to image-based rendering. In
this paper we explore this topic further and provide a solution using an objective image quality metric which
tries which we use to optimize render quality. We test the presented solution on both desktop and mobile
systems.
1 INTRODUCTION AND
RELATED WORK
In order to efficiently render large virtual 3D environ-
ments at interactive framerates, application designers
have traditionally resorted to using polygonal Level-
of-Detail (LoD) techniques. Usually, either a series
of discrete models or one progressive model are de-
termined during preprocessing. At runtime, a target
framerate is maintained in order to provide a satisfac-
tory user experience. This is achieved by employing
several metrics such as distance, projection size and
scene importance to scale the objects a suitable res-
olution. In recent years however, image-based tech-
niques have received a lot of interest from the research
community because of their ability to represent com-
plex models in a compact way, thereby also decreas-
ing the time needed for rendering.
An important question however, is when to switch
from polygonal rendering to image-based rendering.
Previously, a subjective quality metric was often used
for determining the switching distance at runtime. In
this paper we explore this topic further and provide
a solution using an objective image quality metric
which tries to optimize render quality.
Our following related work discussion is divided
into three categories: firstly, polygonal LoD tech-
niques which have been used traditionally, secondly,
image-based rendering techniques which have been
researched in previous years as an alternative render-
ing method for distant objects and finally, mixed sys-
tems, benefiting from the strengths of each system:
polygonal rendering for objects close by in high qual-
ity, faster image-based rendering for objects further
away providing sufficient detail.
1.1 Polygonal LoD
The first techniques for choosing the Level of Detail
(LoD) of polygonal objects have used static heuris-
tics based on the screen size of an average face of
the object (Funkhouser et al., 1992) and/or the dis-
tance of the object to the user (Blake, 1987; Rossignac
and Borrel, 1993). These simple heuristics improve
the frame rate in many cases, but cannot guarantee a
regulated or bounded execution time. To guarantee a
241
Jehaes T., Lamotte W. and Tack N. (2008).
OBJECTIVE QUALITY SELECTION FOR HYBRID LOD MODELS.
In Proceedings of the Third International Conference on Computer Graphics Theory and Applications, pages 241-248
DOI: 10.5220/0001099102410248
Copyright
c
SciTePress

bounded frame rate, (Funkhouser and S
´
equin, 1993)
have presented a predictive technique that uses an es-
timate of the execution time for the correct choice of
the LoD to use. The core of this work is a multiple
choice knapsack problem that maximizes the visual
quality for a given maximum execution time. The
greedy solution of Funkhouser and S
´
equin however
only guarantees to be half as good as the optimal so-
lution. Therefore, (Gobbetti and Bouvier, 2000) have
proposed to use convex optimisation (interior point al-
gorithm) with a guaranteed specified accuracy.
1.2 Image-based Rendering
As a solution for faster rendering of large geomet-
rical models, Image-Based Rendering (IBR) has re-
ceived many followers over the last years. The render
times of image-based models are fairly constant and
rely on the resolution of the reference images instead
of polygon count. This means that for high polygon
count models, image-based rendering can be a much
faster render solution without introducing too much
visual degradation. For closeup viewing of detailed
models however, conventional polygon rendering is
often still preferred. McMillan first proposed the fun-
damental 3D warping equation together with an oc-
clusion compatible warping order to efficiently render
new views based on a series of reference depth im-
ages (McMillan and Bishop, 1995). Extensions to this
have been presented in (Shade et al., 1998), (Oliveira
and Bishop, 1999) and (Chang et al., 1999) whereby
separate models are represented by a cluster of refer-
ence images.
More recently, (Oliveira et al., 2000) shows that
a factorisation of the 3D warping equation, called
relief-texture mapping (RTM), enables the use of fast
graphics hardware for part of the calculation to speed
up the warping. Warping is done in two steps: a pre-
warp followed by a simple texture mapping. This
delivers a significant speedup because the pre-warp
is implemented using a fast two-pass reconstruction
algorithm and the texture mapping can be done on
fast graphics hardware. Layered Relief Textures pre-
sented in (Parilov and Stuerzlinger, 2002) combine
the idea of storing multiple samples per pixel with fast
hardware assisted warping of RTM. Finally, (Fujita
and Kanai, 2002) incorporate dynamic shading into
the RTM approach by using per-pixel shading hard-
ware.
1.3 Qos for Mixed Systems
Conventional texture mapping can be seen as a very
simple form of image-based rendering that does not
take depth information into account. Based on this,
(Maciel and Shirley, 1995) focus on maintaining a
high framerate by replacing clusters of objects with
simple texture mapped primitives. Similarly, (Shade
et al., 1996) use a BSP tree scene representation for
which they cache images of nodes that were rendered
in previous frames. Taking frame-to-frame coherence
into account they reused these cached images for ren-
dering subsequent frames, thereby gaining a signifi-
cant rendering speedup.
Later on, making use of depth image representa-
tions, (Rafferty et al., 1998) extend a portal culling
renderer in which they determine the view through a
portal by warping a precalculated Layered Depth Im-
age (LDI) that captures the view through that portal.
This approach is generalized for massive model ren-
dering in (Aliaga and Lastra, 1999). A grid of view-
points is constructed for which the far geometry is de-
termined after which LDIs are created that represent
this far geometry. The renderer can then first render
far geometry from LDIs followed by polygon based
rendering of the near geometry. The MMR system
(Aliaga et al., 1999) replaces the LDIs in the previous
approach by Textured Depth Meshes (TDMs) to make
optimal use of current graphics hardware.
Two fundamental drawbacks of the former hy-
brid techniques are the often very long preprocess-
ing times and huge storage requirements. Therefore,
a system that creates image-based representations on
demand without the need for additional storage was
presented in (Hidalgo and Hubbold, 2002). They em-
ploy a dual renderer setup in which the hybrid ren-
derer (HR) can request reference depth images rep-
resenting the current far geometry from a reference
image generator (RIG) that runs in parallel. While
the RIG is working on the requested data, the HR can
use warping on the previous reference depth image to
render its frames. Prediction is used to request opti-
mal reference images.
A specific optimization algorithm for a terrain fly-
over application was proposed in (Zach et al., 2002).
Interesting in this approach is that they not only use
discrete and continuous Level Of Detail for polygonal
rendering but also point-based rendering for the trees
on the terrain.
A major drawback of these approaches is that they
are not well suited for handling dynamic scenes for
which the contents is not known beforehand. This
is the case for instance for the increasingly popu-
lar MMORPGs. We have therefore selected to use
the hybrid rendering technique presented in (Jehaes
et al., 2004), which was extended to mobile devices
in (Jehaes et al., 2005). This technique uses a com-
bination of progressive geometry and relief texture
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
242

mapped objects for representing separate objects in
the scene. The authors have however only used a sub-
jective quality metric for selecting at run-time which
render method should be used for each object in-
stance. In this paper we therefore present a objective
metric based on image quality.
In the next section we give some more details
about hybrid object representation. Following that,
we present our solution for an objective LoD selec-
tion metric which is meant to maintain a high level of
image quality. Finally, we present our test setup and
results on both desktop and mobile systems and end
with conclusions and some pointers for future work.
2 HYBRID MODELS
The hybrid geometric/image-based rendering scheme,
which was presented in (Jehaes et al., 2004), makes
use of geometry simplification based on (Hoppe,
1996), and the relief-texture mapping technique
which was introduced by Oliveira et al. (Oliveira
et al., 2000). This last technique is used because
it makes efficient use of the texturing capabilities of
current graphics cards to speed up rendering of the
image-based models. It also integrates easily into the
standard geometry rendering pipeline. An example
of relief texture mapped model representations can be
seen in figure 7(b). The relief textures capture the
appearance of the model as seen from each side of
the bounding box. During rendering, each visible re-
lief texture is pre-warped into a texture which is sub-
sequently mapped onto the corresponding bounding
box quad, resulting in a correct view of the model.
Because the pre-warp equation can be efficiently cal-
culated, the total render time will be small and mostly
depends on the resolution of the relief textures.
The render scheme also supports animated objects
such as avatars. Often, the animations for objects fur-
ther away do not add much to the visual quality, so
they can be suppressed. Furthermore, these distant
animated objects can then be replaced by RTM ob-
jects, using the same LoD rendering scheme.
3 OBJECTIVE HYBRID LOD
SELECTION
Triangular rendering is nowadays one of the most ef-
ficient methods for real-time rendering of 3D con-
tent. However, in some cases, triangles can become
so small that the processing of their three vertices and
the rasterization are done for shading only one pixel.
In this case, other rendering algorithms, such as IBR,
become more efficient. Therefore, Hybrid LoD selec-
tion also selects the most efficient rendering method
next to the correct LoD for the rendered object. Sub-
sections 3.1 and 3.2 respectively discuss LoD selec-
tion for the polygonal and IBR objects. Subsection
3.3 then discusses the selection of the most efficient
rendering algorithm.
3.1 Polygonal LoD Selection
The LoD selection mechanism for polygonal objects
uses a Pareto optimisation (Tack et al., 2006) for the
selection of the optimal LoDs in terms of quality and
render time. Central in this approach is the use of the
Pareto plot, which is a collection of Pareto optimal
points for which it is impossible to improve the vi-
sual quality without increasing the cost. The Pareto
plots are measured - for each separate polygonal ob-
ject in the scene - in off-line preprocessing steps and
encoded with the objects. The online steps of the opti-
mization use a gradient descent algorithm to combine
the Pareto plots of the visible objects in the scene with
a minimum of online parameters (e.g. object distance)
to find the optimal trade-off between quality and cost.
3.2 LoD Selection for Relief Texture
Mapping
Advanced LoD selection mechanisms use a model for
estimating the performance and the quality (Gobbetti
and Bouvier, 2000). However, these systems control
the render time of polygonal rendering, which is a
very regular algorithm and hence easy to model. Re-
lief Texture Mapping has an irregular flow and its per-
formance model is much more complicated, i.e. it is
necessary to track a lot of online parameters to obtain
a good estimate of the render time. Consequently, us-
ing this performance model at run-time has a nega-
tive effect on frame render times. We have therefore
chosen a different approach for the RTM control algo-
rithm which requires much less run-time processing:
the selection of the switching distance and resolution
of the relief texture mapped objects by using a target
quality of the rendered image as the control parame-
ter.
In order to specify a target quality, we have used
two objective quality metrics for measuring the vi-
sual quality of an RTM model: the Peak Signal-
to-Noise Ratio (PSNR) and Structural SIMilarity
(SSIM) (Wang et al., 2004) metrics. These metrics
compare a reference image with the image that con-
tains the rendered RTM object. The reference im-
age is obtained by rendering the polygonal object at
OBJECTIVE QUALITY SELECTION FOR HYBRID LOD MODELS
243

Figure 1: The PSNR as function of the viewing angles ϕ
and θ (30
◦
steps) for three different distances to the object
for a single resolution RTM object.
full quality. Next, the quality is sampled for different
viewing angles around the object. The viewpoint is
first located at a fixed distance and both the viewing
angles ϕ and θ are set to 0, the quality is derived and
the viewing angle ϕ is increased by a preset amount.
This is repeated until the viewing angle ϕ is 360
◦
,
then ϕ is reset to 0 and θ is increased. The procedure
is stopped at θ equal to 180
◦
and ϕ equal to 360
◦
. This
procedure is then repeated for different distances.
Figure 1 illustrates the result for an RTM object
(flamingo) with a resolution of 512x512. The PSNR is
plotted as a function of the viewing angles ϕ and θ and
distance between the observer and the object. From
figure 1, one can derive the parameters onto which
the quality depends:
• The quality increases with a larger distance be-
tween the viewpoint (observer) and the object.
• The quality is the highest for viewpoints near to
the viewpoints for which the Relief Texture Maps
were derived: ϕ equal to 0
◦
, 90
◦
, 180
◦
and
270
◦
and θ equal to 0
◦
, 90
◦
and 180
◦
. For
in-between viewpoints, interpolations between
RTMs are needed and the quality decreases be-
cause of occlusions in the used relief texture map.
An additional parameter, which is not shown in
figure 1 but that also influences the quality is the res-
olution of the RTMs. This is illustrated in Figure 2,
which shows the PSNR as a function of the distance to
the viewpoint for an RTM object at a single viewing
angle and different resolutions.
Figure 1 and Figure 2 can be summarised in a ta-
ble, which stores the resolution of the RTM object as
a function of quality, distance and viewing angle (see
Table 1 for a single viewing angle). This table is de-
rived in preprocessing and is used at run-time for the
selection of the correct RTM resolution.
Figure 2: The quality (PSNR) as a function of distance to
the viewpoint and resolution. For small distances, a high
resolution is needed for a acceptable target quality of 30
dB; for large distances, this needed resolution decreases.
Table 1: The selection of the RTM resolution as a function
of requested quality and distance.
dist/Q 20 dB 25 dB 30 dB 35 dB
5 m 16x16 128x128 512x512 -
10 m 16x16 16x16 64x64 256x256
20 m 16x16 16x16 16x16 64x64
30 m ... ... ... ...
3.3 Hybrid LoD Selection
To be able to select the most efficient rendering algo-
rithm, a comparison between polygonal rendering and
RTM is needed. Figure 3 therefore shows the render
time as a function of the quality (PSNR), object dis-
tance and the used rendering technique. The quality
is varied by changing the resolution of the relief tex-
tures for RTM and the number of triangles for polyg-
onal rendering. The render time was measured on a
Pentium M processor with a frequency of 1.86GHz
and an Intel 915GM graphics accelerator. The time
reported in Figure 3 for RTM is the total time needed
for a complete warping operation, of which the pre-
warping takes 90% (Oliveira et al., 2000). However,
the pre-warping is only done when the relative posi-
tion of the camera to the object changes and the real
impact of RTM on the total render time will therefore
depend on the user navigation and object animations.
Figure 3 shows an exponential relationship be-
tween the execution time and quality for RTM, while
the relationship is linear for polygonal rendering.
From Figure 3, it is clear that high resolution relief
textures (points with high execution time) must be
used for content which is close to the observer.E.g.,
for the distance of 2.8m (RTM:2.8), the technique
gives a quality of 23 dB for an execution time of 23
ms. Even if the pre-warping is not executed for ev-
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
244
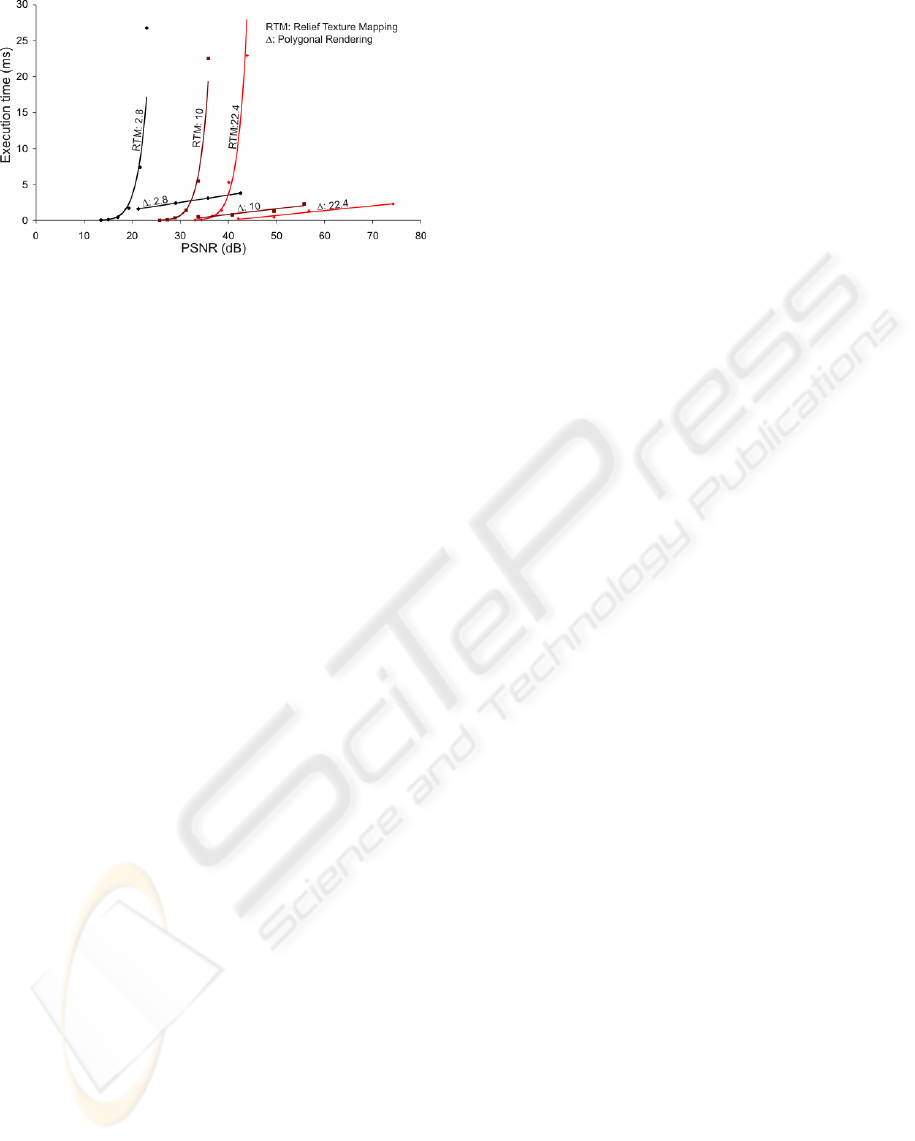
Figure 3: Polygonal rendering versus RTM: execution time
as a function of quality and distance (2.8m, 10m and
22.4m).
ery frame, its impact is still too high to use RTM
for close content. However, for distant content (e.g.
RTM:22.4), low resolution relief textures give an ac-
ceptable quality (> 30dB) for a low execution time.
Even if the pre-warping is executed every frame, the
render time is still comparable with the polygonal ren-
dering time. If the pre-warping is not needed, then
the rendering is limited to rendering of the texture
mapped bounding box and the rendering time is neg-
ligible.
Our hybrid LoD selection first uses table 1 to se-
lect the resolution of the RTM object to meet the re-
quested quality. If this resolution is higher than a hard
limit (e.g. 128x128), polygonal rendering is used for
that object. The RTM objects are then rendered and
the render time is measured. This render time is then
subtracted from the render time budget and the Pareto
optimisation for polygonal rendering is executed for
maximising the quality for the polygonal objects for
the computed time budget.
In order to optimize user experience and interac-
tivity we set a target framerate and make adjustments
to the target quality based on the current framerate.
When the current framerate is either higher or lower
than the target framerate, we increase or decrease the
target quality. Since our LoD selection is directly
linked to the target image quality, switching distances
and resolutions are automatically adjusted resulting in
a higher or lower framerate.
4 RESULTS
In order to determine the usefulness of our image-
based quality metric in an actual application, we set
up a test for both desktop and mobile systems. Con-
centrating first on the desktop scenario, we set out
to render a scene consisting of 400 object instances
which were randomly chosen from 8 different base
models. Each model representation consisted of a
progressive mesh representation, with a correspond-
ing Pareto plot, and a RTM representation for which
the resolutions and switching distances were deter-
mined by using the image-based metric presented
above. For reasons of comparison, we defined a cam-
era path through the scene which would be used for
each of the 4 render scenarios: full resolution geom-
etry, image-based only (IBR), progressive mesh only
(PM) and mixed representations. As can be seen in
figure 5(a), using full resolution geometry rendering
would result in a maximal triangle count of more than
1600000 for which we got a framerate of about 4 fps.
Note that the overly large frametimes for the full ge-
ometry walkthrough were left out of the graphs for
reasons of readability. Fortunately, we can increase
the framerate considerably by using one of the other
representation types as shown in figure 4(a). The tar-
get frametime for both the PM and mixed scenarios
was set to 20ms, while the IBR scenario would render
at maximum speed. We could have also regulated the
IBR framerate by increasing the RTM resolution, but
we wanted to show the speedup benefits of using the
IBR approach.
During our experiments we tested with both the
PSNR and SSIM image quality metrics and found that
the SSIM metric gave results which were more con-
sistent compared to our own subjective evaluation of
the image quality. After performing some tests com-
paring the results of both metric, we clearly noticed
that the some PSNR results were inconsistent with
what was to be expected. The SSIM metric exhib-
ited a much more consistent result, so we therefore
switched over to this metric. By combining the frame-
time graphs with the results of image quality measure-
ments shown in table 2, which were taken at the corre-
sponding points indicated on figure 4(a), we can con-
clude that our mixed representation scenario, using
the image-based metric results in higher image quality
at comparable frametimes which was what we set out
to achieve. The difference in image quality between
the four scenarios is indicated in figure 6. The use
of the mixed scenario clearly allows for much higher
resolution meshes to be used for objects close to the
viewer. As our camera moves through the scene, less
objects are in the view and the PM and mixed sce-
narios converge to the same image quality, which can
also be concluded from figures 5(a) and 5(c).
For our second test we set up a scene consisting
of 60 object instances, using the same base models as
in the desktop test. The application was deployed on
Dell X51v PDAs, which incorporate the Intel 2700G
GPU. From figure 5(b) it can be seen that the maximal
triangle count at application start is about 230000 for
OBJECTIVE QUALITY SELECTION FOR HYBRID LOD MODELS
245
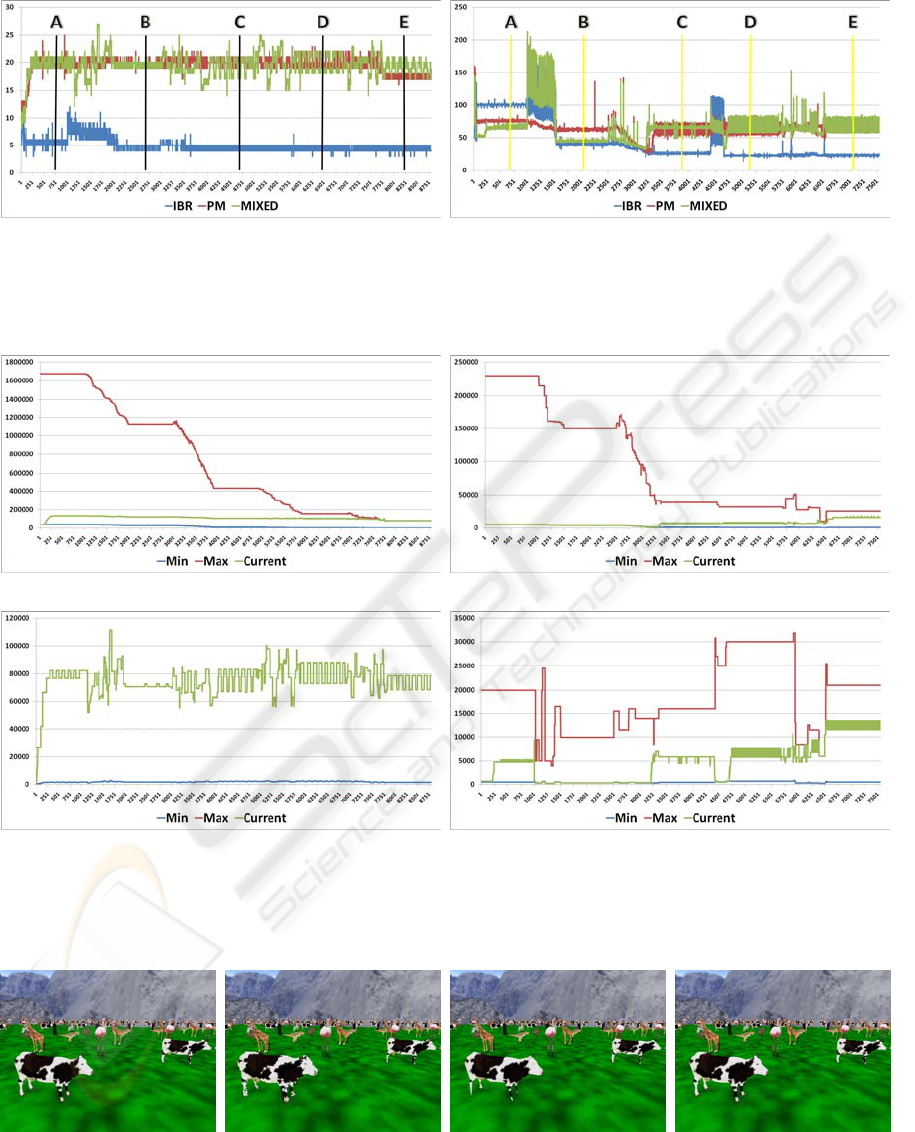
(a) Desktop (b) PDA
Figure 4: Frametimes (ms) measured during a walkthrough (Target frametime was set to 20ms for desktop and 66ms for
PDA). Image quality was measured at each of the specified points (A-E).
(a) PM only (Desktop) (b) PM only (PDA)
(c) Mixed (Desktop) (d) Mixed (PDA)
Figure 5: Number of PM triangles rendered for desktop and PDA during the walkthrough. Maximum and minimum represent
lowest and highest resolutions for all objects combined. Current denotes the selected object quality at runtime.
(a) (b) (c) (d)
Figure 6: Desktop screenshots: (a) Full geometry (b) IBR (c) PM only (d) Mixed PM and IBR.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
246
Table 2: SSIM quality measurements for desktop.
SSIM IBR PM MIXED
A 0.8756 0.9747 0.9804
B 0.9318 0.9865 0.9912
C 0.9278 0.9882 0.9921
D 0.9408 0.9935 0.9992
E 0.9266 1.0000 1.0000
Table 3: SSIM quality measurements for PDA.
SSIM IBR PM MIXED
A 0.9686 0.9775 0.9812
B 0.9696 0.9852 0.9855
C 0.9694 0.9884 0.9913
D 0.9791 0.9975 0.9977
E 0.9683 0.9996 0.9996
which we got a framerate of 0.41 fps (not shown) us-
ing full geometry rendering. Again, by applying one
of the other representation types, we can substantially
increase the framerate. Note that the target frametime
for this mobile application was set to 66ms. When
we compare the resulting frametimes graph of figure
4(b) to figure 4(a), we can see that on the PDA, it is
much more difficult to stay close to the target frame-
time. This is a result of the inferior processing capa-
bilities of the mobile device. Furthermore, for both
the IBR and mixed scenarios, we see a sudden in-
crease in frametime at two periods during the walk-
through. These two periods consist of camera move-
ment, thereby resulting in the need for updates to the
RTM objects. When looking at figures 4(b) and 5(d)
we can see however that the mixed scenario is much
less affected during the second movement period be-
cause at this moment much less objects are visible
and rendered using the RTM technique than during
the first period.
Another difference can be seen when comparing
the graphs in figures 5(c) and 5(d). On the PDA we
are never able to render the maximal object quality,
while on the desktop, objects near to the viewer are
always rendered at maximum resolution. Even so,
from table 3 and the screenshots presented in figure
7 it is obvious that by using the mixed representation
we can greatly increase image quality while rendering
at comparable framerates. Furthermore, notice that
when using the PM only approach, the application is
unable to bring the frametime down to the target fram-
etime, even by using the lowest resolution versions
for all object instances while the mixed approach can
render at the target frametime using higher resolution
versions for the near objects.
5 CONCLUSIONS
We presented our solution for determining when to
switch from standard geometry representations to
image-based representations during rendering of a
complicated scene. During preprocessing, an image
quality metric is used for determining at which dis-
tance the image-based representation provides suffi-
cient image quality compared to the geometrical ver-
sion. These measurements are performed for a sub-
set of viewpoints on the viewing sphere and stored
for later use. We successfully tested the usefulness of
this metric during a test that was performed on both a
desktop and a mobile system.
With regard to future work, we will be looking
into other image metrics for determining the quality
difference between the images rendering using the
different representation types because we have no-
ticed that, even by using the SSIM metric, the im-
age metric can sometimes differ from the quality per-
ceived by users themselves.
ACKNOWLEDGEMENTS
This work has been done under IBBT project
A4MC3.
REFERENCES
Aliaga, D. G., Cohen, J., Wilson, A., Baker, E., Zhang, H.,
Erikson, C., III, K. E. H., Hudson, T., Sturzlinger, W.,
Bastos, R., Whitton, M. C., Jr., F. P. B., and Manocha,
D. (1999). MMR: an interactive massive model ren-
dering system using geometric and image-based ac-
celeration. In Symposium on Interactive 3D Graphics,
pages 199–206. ACM.
Aliaga, D. G. and Lastra, A. (1999). Automatic im-
age placement to provide a guaranteed frame rate.
In Rockwood, A., editor, Siggraph 1999, Computer
Graphics Proceedings, pages 307–316, Los Angeles.
Addison Wesley Longman.
Blake, E. (1987). A metric for computing adaptive detail in
animated scenes using object-oriented programming.
In Eurographics Conference Proceedings, pages 295–
307.
Chang, C.-F., Bishop, G., and Lastra, A. (1999). Ldi tree: A
hierarchical representation for image-based rendering.
In Rockwood, A., editor, Siggraph 1999, Computer
Graphics Proceedings, pages 291–298, Los Angeles.
Addison Wesley Longman.
Fujita, M. and Kanai, T. (2002). Hardware-assisted relief
texture mapping. Eurographics 2002 short paper pre-
sentation, pages 257–262.
OBJECTIVE QUALITY SELECTION FOR HYBRID LOD MODELS
247

(a) (b) (c) (d)
Figure 7: PDA screenshots: (a) Full geometry (b) IBR (c) PM only (d) Mixed PM and IBR.
Funkhouser, T. A. and S
´
equin, C. H. (1993). Adaptive dis-
play algorithm for interactive frame rates during visu-
alization of complex virtual environments. Computer
Graphics, 27(Annual Conference Series):247–254.
Funkhouser, T. A., Squin, C. H., and Teller, S. J. (1992).
Management of large amounts of data in interactive
building walkthroughs. In 1992 Symposium on Inter-
active 3D Graphics, pages 11–20.
Gobbetti, E. and Bouvier, E. (2000). Time-critical multires-
olution rendering of large complex models. Journal of
Computer-Aided Design, 32(13):785–803.
Hidalgo, E. and Hubbold, R. (2002). Hybrid geometric -
image based rendering. Computer Graphics Forum,
21(3).
Hoppe, H. (1996). Progressive meshes. Computer Graphics
(ACM SIGGRAPH ’96 Proceedings), 30(Annual Con-
ference Series):99–108.
Jehaes, T., Quax, P., and Lamotte, W. (2005). Adapt-
ing a large scale networked virtual environment for
display on a pda. In ACE ’05: Proceedings of the
2005 ACM SIGCHI International Conference on Ad-
vances in computer entertainment technology, pages
217–220, New York, NY, USA. ACM Press.
Jehaes, T., Quax, P., Monsieurs, P., and Lamotte, W. (2004).
Hybrid representations to improve both streaming
and rendering of dynamic networked virtual environ-
ments. In Proceedings of the 2004 International Con-
ference on Virtual-Reality Continuum and its Applica-
tions in Industry (VRCAI2004).
Maciel, P. W. C. and Shirley, P. (1995). Visual navigation of
large environments using textured clusters. In Sympo-
sium on Interactive 3D Graphics, pages 95–102, 211.
McMillan, L. and Bishop, G. (1995). Plenoptic modeling:
An image-based rendering system. SIGGRAPH 95
Conference Proceedings, pages 39–46.
Oliveira, M. M. and Bishop, G. (1999). Image-based ob-
jects. In Symposium on Interactive 3D Graphics,
pages 191–198.
Oliveira, M. M., Bishop, G., and McAllister, D. (2000). Re-
lief texture mapping. In Akeley, K., editor, Siggraph
2000, Computer Graphics Proceedings, pages 359–
368. ACM Press / ACM SIGGRAPH / Addison Wes-
ley Longman.
Parilov, S. and Stuerzlinger, W. (2002). Layered relief tex-
tures. Journal of WSCG, 10(2):357–364. ISSN 1213-
6972.
Rafferty, M. M., Aliaga, D. G., Popescu, V., and Lastra,
A. A. (1998). Images for accelerating architectural
walkthroughs. IEEE Computer Graphics and Appli-
cations, 18(6):38–45.
Rossignac, J. and Borrel, P. (1993). Multi-resolution 3d ap-
proximations for rendering complex scenes. In Con-
ference on Geometric Modeling in Computer Graph-
ics, pages 455–465.
Shade, J., Lischinski, D., Salesin, D. H., DeRose, T.,
and Snyder, J. (1996). Hierarchical image caching
for accelerated walkthroughs of complex environ-
ments. Computer Graphics, 30(Annual Conference
Series):75–82.
Shade, J. W., Gortler, S. J., He, L.-W., and Szeliski, R.
(1998). Layered depth images. Computer Graphics,
32(Annual Conference Series):231–242.
Tack, N., Lafruit, G., Catthoor, F., and Lauwereins, R.
(2006). Platform independent optimization of multi-
resolution 3d content for enabling universal media ac-
cess. The Visual Computer, 22(8):577–590.
Wang, Z., Bovik, A. C., Sheikh, H. R., and Simoncelli, E. P.
(2004). Image quality assessment: From error visi-
bility to structural similarity. IEEE Transactions on
Image Processing, 13(4):600–612.
Zach, C., Mantler, S., and Karner, K. (2002). Time-critical
rendering of discrete and continuous levels of detail.
In VRST ’02: Proceedings of the ACM symposium
on Virtual reality software and technology, pages 1–
8, New York, NY, USA. ACM Press.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
248
