
GENERATING HUMAN INTERACTIVE BEHAVIOURS USING THE
WINDOWED VITERBI ALGORITHM
Yue Zheng, Yulia Hicks, Dave Marshall
Cardiff University, Cardiff, UK, CF24 3AA
Darren Cosker
Department of Computer Science, Bath University, Bath, UK, BA2 7AY
Keywords:
Windowed Vitebi Algorithm, Generating interactive behaviours, Dual HMM.
Abstract:
In this paper, we propose a new approach for generating interactive behaviours for virtual characters, namely
the windowed Viterbi algorithm, capable of doing so in real-time. Consequently, we compare the performance
of the standard Viterbi algorithm and the windowed Viterbi algorithm within our system. Our system tracks
and analyses the behaviour of a real person in video input and produces a fully articulated three dimensional
(3D) character interacting with the person in the video input. Our system is model-based. Prior to tracking,
we train a collection of dual Hidden Markov Model (HMM) on 3D motion capture (MoCap) data representing
a number of interactions between two people. Then using the dual HMM, we generate a moving virtual
character reacting to (the motion of) a real person. In this article, we present the detailed evaluation of using
the windowed Viterbi algorithms within our system, and show that our approach is suitable for generating
interactive behaviours in real-time.
1 INTRODUCTION
In recent years, motion capture technology has come
into common use in the computer graphics and com-
puter vision area. Using motion capture equipment,
real person behaviours can be recorded and exported
as MoCap data. Many researchers have become in-
terested in producing virtual worlds and populating
them with virtual characters using MoCap data (Zor-
dan and Horst, 2003), (Meredith and Maddock, 2005)
and (Wen et al., 2006). There has been also a limited
amount of research into enabling virtual characters
with the ability to produce intelligent behaviour on
the basis of visual analysis of the scene, which mainly
was conducted in the computer vision area. Johnson
et al. (Johnson et al., 1998) developed a system ca-
pable of producing a 2D silhouette of a virtual person
interacting with a real person in video and demon-
strated it working with a handshake behaviour. Je-
bara et al. (Jebara and Pentland, 2002) developed a
system capable of producing a dynamic human face
together with speech reacting to the events around it.
However, as Jebara states himself, the system exhib-
ited only limited intelligent behaviour. Both of the
above systems automatically learnt the intelligent be-
haviours from observed video data and represented
them using HMMs (Rabiner, 1989), which are com-
monly used for representing temporal dynamics of the
data. In our previous research (Zheng et al., 2006),
we tracked a 3D person in real video using a HMM
trained on 3D MoCap data, and then used the tracked
person as the input to generate interactive behaviours
for virtual characters. However, our system was able
to only post process the data as opposed to real-time
processing.
In this paper, we propose a new approach for gen-
erating interactive behaviours, namely the windowed
Viterbi algorithm (Pilu, 2004), capable of doing so
in real-time. Consequently, we compare the perfor-
mance of the standard Viterbi algorithm and the win-
dowed Viterbi algorithm within our system. The ad-
vantage of the standard Viterbi algorithm (Rabiner,
1989) is that the generated behaviours look very sim-
ilar to the real behaviours. However, when we use
this method, it requires the full observation sequence
before the processing starts, thus making real-time
processing impossible. When we use the windowed
Viterbi method instead, it does not require the full ob-
353
Zheng Y., Hicks Y., Marshall D. and Cosker D. (2008).
GENERATING HUMAN INTERACTIVE BEHAVIOURS USING THE WINDOWED VITERBI ALGORITHM.
In Proceedings of the Third International Conference on Computer Graphics Theory and Applications, pages 353-358
DOI: 10.5220/0001097503530358
Copyright
c
SciTePress

servation sequence before the processing starts, thus it
can be used in a real-time system. Moreover, we still
can obtain realistic generated interactions behaviours,
as we show in our results section.
The organization of the paper is as follows: in
Section 2, we describe our model of interactive be-
haviours. Then we explain the behaviour generating
part in Section 3. The experiments together with eval-
uation are presented in Section 4, followed by our
conclusion and future work in Section 5.
2 MODEL OF INTERACTIVE
BEHAVIOURS
In this work, our dual HMM was trained to repre-
sent several types of interactive behaviours involving
two people. In particular, we model the following
behaviours: a handshake between two people; one
person pulling another person and one person push-
ing another person. The model is trained on the 3D
MoCap data of two real people. In our experiments
we use PhaseSpace motion digitizer system to cap-
ture several sets of motion data in 3D space with 30
markers, therefore each pose is represented by a 90-
dimensional vector. Such data is always constrained
by physical and dynamical factors, thus we reduce its
dimensionality using Principal Component Analysis
(PCA), keeping 95% of the eigenenergy (leaving 11
dimensions), and then train our HMM on a number of
such vectors.
A dual HMM, such as we use here, has two sets
of states. The first set of states models the poses for
the first person (A), and the other set of states models
the poses for the second person (B). Each state in the
model is modelled with a Gaussian. The first HMM
is defined as:
λ
A
= (T
A
, B
A
, π
A
) (1)
where T
A
is the state transition probability matrix, B
A
is the observation probability distribution and π
A
is
the initial state probability distribution.
The second HMM is defined as
λ
S
= (T
A
, B
S
, π
A
) (2)
It has the same transition matrix as λ
A
. The means and
covariances of the Gaussians are calculated from the
data set representing the motion of the second person
(B).
Using this dual HMM, we can estimate a sequence
of 3D poses for a virtual character given a sequence
of 3D poses of the first person (A) as described in the
next section.
3 GENERATING INTERACTIVE
BEHAVIOURS
In our system, we track 3D articulated motion of a
real person in a video sequence using annealed parti-
cle filtering (Deutscher et al., 2000), after which we
use the obtained 3D data in conjunction with the dual
HMM and the standard Viterbi algorithm to generate
the responsive behaviour for a virtual character. Fi-
nally, the virtual character performing the generated
motion can be placed back into the original video se-
quence, as shown in Figure 1. In this article, we focus
our attention on generating interactive behaviours us-
ing the windowed Viterbi algorithm in the latter part
of our system.
Figure 1: Interactions with virtual character (Pushing).
In the following sections we describe briefly the
theory of the windowed Viterbi algorithm, and the
process of generating interactive behaviours given a
sequence of the poses for the first person (A).
3.1 The Windowed Viterbi Algorithm
The standard Viterbi algorithm(Rabiner,1989) is able
to find the single best state sequence for given ob-
servation sequence. It requires the full observation
sequence before the processing starts, which fully
prevents real-time processing. In order to achieve
the benefits of the Viterbi without having to wait
for the entire full state sequence, we use the win-
dowed Viterbi algorithm (Pilu, 2004) and (Rybski and
Veloso, 2005), that can obtain the best state sequence
using only the part of full state sequence at each time.
In a real-time system, the windowed Viterbi algo-
rithm will cause a small delay in the state estimate.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
354

In our experiments, we capture our training data at
30 fps, and we choose the length of 10 as the win-
dow size. Thus the delay time is 0.33 second. It is
not noticed in most of the generated motion. How-
ever, it is possible to avoid this delay by adjusting the
time correspondences between interacting people in
the training data.
At any given time t, we take a time slice of T sam-
ples and apply the Viterbi procedure to it. Of the se-
quence of states Q = {q
1
, q
2
, ...q
T
} defining the best
path for said time slice we retain only the second state
q
2
.
In summary, the windowed Viterbi algorithm can
be described in the following way (Pilu, 2004).
1. Select the initial state probability π for the N
states.
π
N+1
2
= 1, π
i6=
N+1
2
= 0 (3)
And select the length of the window T as well.
2. The best path {q
1
, q
2
, ..., q
T
} for the window T
can be obtained using the standard Viterbi pro-
cessing.
3. Retain the second state q
2
as the output at time t,
and let
π
q
2
= 1, π
i6=q
2
= 0 (4)
for processing of the next window.
4. Repeat steps 2-3 (slice trellis forward) until the
end state is reached.
3.2 Estimating Output Behaviours
Now it is possible, given as input a sequence of 3D
poses of a person, to generate a corresponding se-
quence of poses for the virtual character using the
methods described in the previous section. To achieve
this goal, we defined a trellis data structure. Figure
2(a) illustrates an example of an initial trellis struc-
ture (Cosker et al., 2004). Each column of the trellis
structure represents motion data of person B corre-
sponding to the motion of our virtual character. We
assign an error value (the Mahalanobis distance) to
each element in each column, and then we work back-
ward through the trellis to choose the motion data for
the virtual character with the lowest cost for each time
t.
Figure 2(b) shows how errors are calculated ac-
cording to the trellis. C
j
t
is the data vector for person
B at time t, b
input
is the new input signal (the track-
ing result from previous section) and b
a
is the data
vector for person A, which has the same location as
the data vector for person B. For state 1 (t = 1) of the
trellis structure, we only have the distance between
the new input signal and person A data (denoted as
Q1 Q2 Q3
Real Person
Motion Data
States
Qt
Qt
Q
t-1
Errors for t = 1, ..., M
D1
D2
D3
ba binput
D4
E = (D1 + D2 + D3) D4
C
t
j
C
t-1
1
C
t-1
2
C
t-1
r
(a)
(b)
Figure 2: (a). Initial Trellis data structure for generating
motion data. (b). Error Calculation for the generating mo-
tion data.
D
4
). For other states t = 2, ..., M (M is the number
of frames of the new input signal), we calculate the
distances between C
j
t
in a column at time t and C
j
t−1
in a column at time t − 1 (denoted as D
1
, D
2
and D
3
).
Thus, error can be obtained as E = D
4
for state 1 and
E = (D
1
+D
2
+D
3
)×D
4
for other state. When errors
are calculated, we work backwards through the trellis
and choose the motion data for the virtual character in
each column with the lowest error at time t. Through
this process, the interactive behaviourfor virtual char-
acter is obtained.
4 RESULTS
In the following experiments we generate interactive
behaviours using the windowed Viterbi algorithm,
and compare the performance of the standard Viterbi
algorithm and the windowed Viterbi algorithm. We
do so by calculating the Euclidean distance between
original motion and the generated motion generated
by both approaches. We also present the results of
visual inspection of the generated motion by ten
independent observers.
Selected frames from the generated video se-
quences are shown in Figures 3, 4 and 5.
GENERATING HUMAN INTERACTIVE BEHAVIOURS USING THE WINDOWED VITERBI ALGORITHM
355
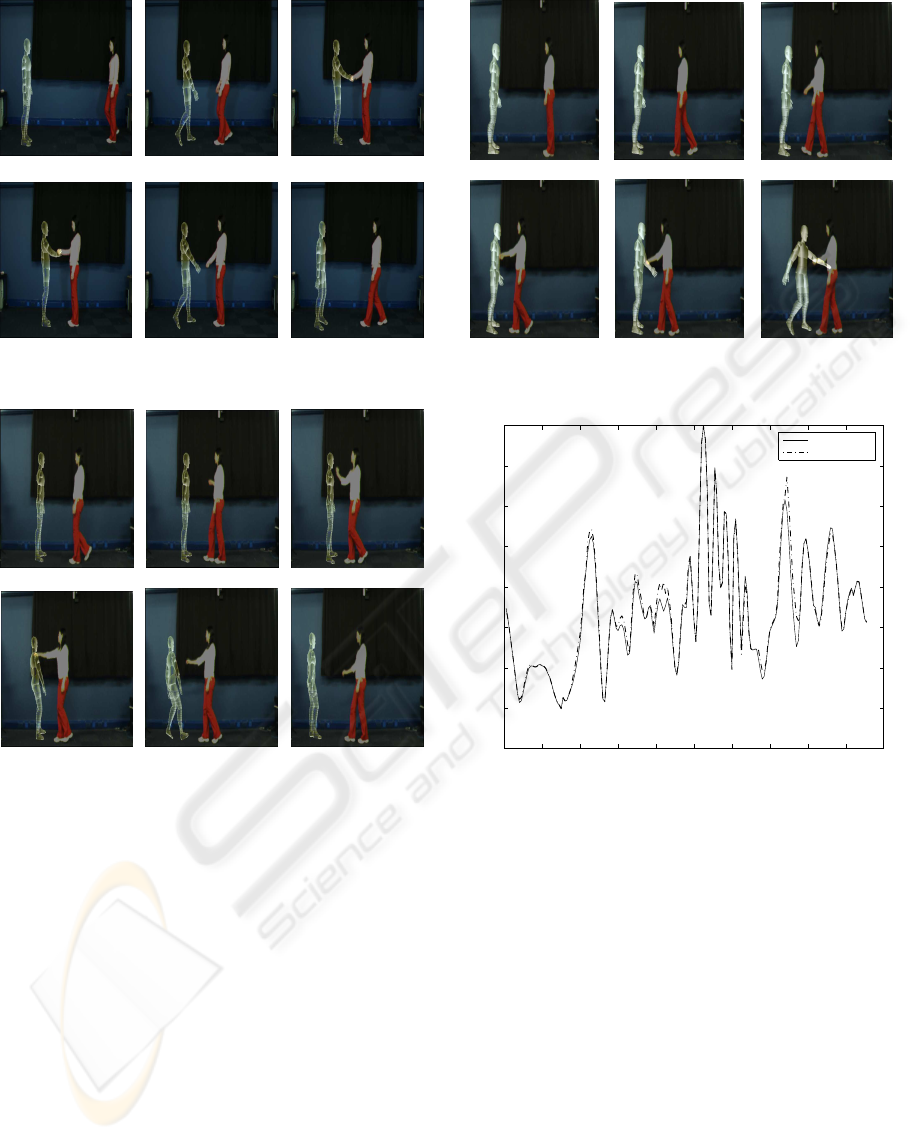
Figure 3: Interactions with virtual character (Handshake).
Figure 4: Interactions with virtual character (Pushing).
4.1 Assessing the Accuracy of the
Generated Behaviour
We trained a dual HMM on 3D MoCap data repre-
senting three different types of motion of two peo-
ple: handshaking, one person pulling another per-
son and one person pushing another person, totalling
10 sequences around 1600 pose vectors. Then given
a sequence of MoCap data extracted from video se-
quence for the first person (A), we generated interac-
tive motion for the second person (B) using the win-
dowed Viterbi algorithm (we choose the length of 10
as the window size that was determined experimen-
tally.). Figures 6, 7 and 8 show the Euclidean distance
between original motion and the generated motion
when using the standard Viterbi algorithm and the
windowed Viterbi algorithm on three different types
of motion.
Figure 5: Interactions with virtual character (Pulling).
0 20 40 60 80 100 120 140 160 180 200
0
20
40
60
80
100
120
140
160
Error of the generated behaviour using the standard viterbi and the windowed Viterbi
Number of Frame
Euclidean Distance (mm)
Standard Viterbi
Windowed Viterbi
Figure 6: Error of the generated behaviour (in mm). Shak-
ing hands behaviour. The error of generated behaviour us-
ing the standard Viterbi algorithm is shown in solid line, the
dash line is for using the windowed Viterbi algorithm.
From these figures, we make the following con-
clusions.
1. In above figures, the error of generated behaviour
using the standard Viterbi algorithm is shown
in solid line. The dash line shows the error
of generating behaviour using the windowed
Viterbi algorithm. It is easy to see the errors of
generating behaviours using both algorithms are
similar. It means the generated motion using the
windowed Viterbi algorithm is as good as the
motion generated using the standard Viterbi, it
also looks real and natural in all of the generated
sequences.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
356
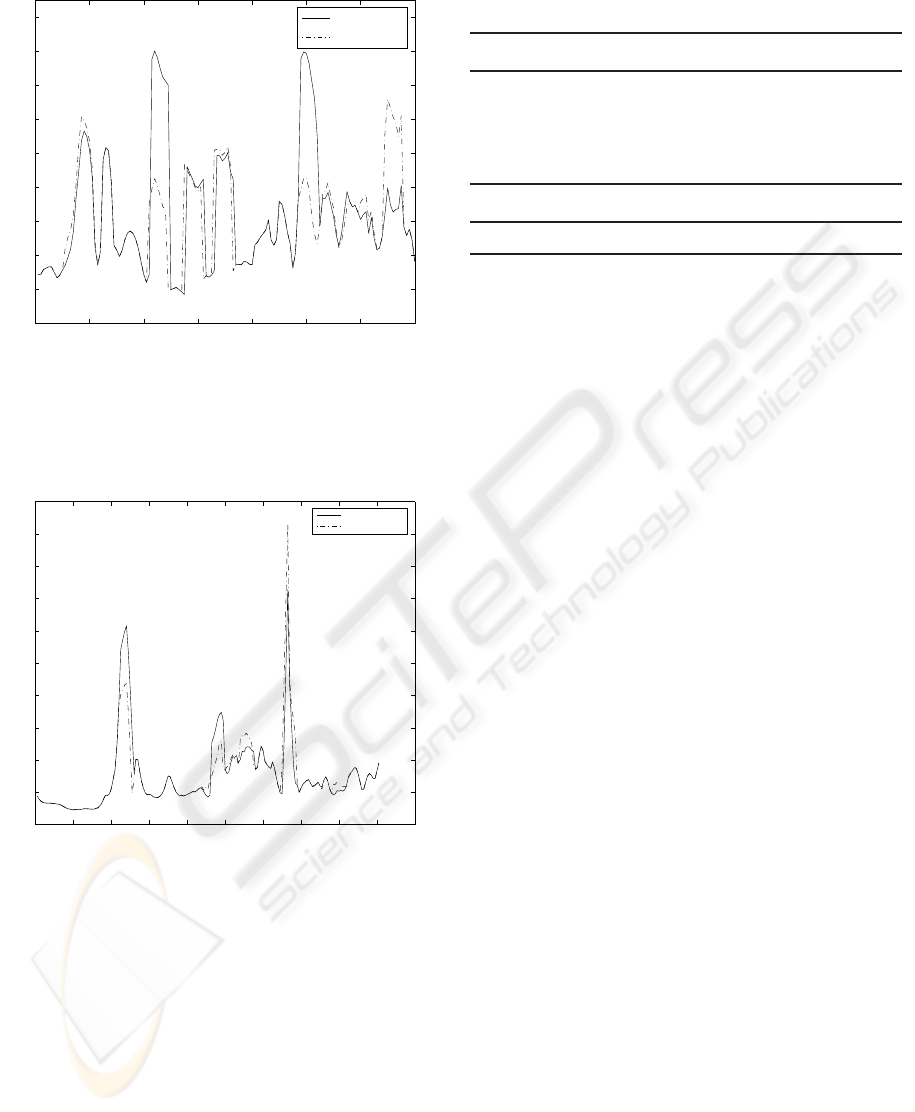
0 20 40 60 80 100 120 140
0
20
40
60
80
100
120
140
160
180
Error of the generated behaviour using the standard viterbi and the Windowed Viterbi
Number of Frame
Euclidean Distance (mm)
Standard Viterbi
Windowed Viterbi
Figure 7: Error of the generated behaviour (in mm). Pulling
behaviour. The error of generated behaviour using the stan-
dard Viterbi algorithm is shown in solid line, the dash line
is for using the windowed Viterbi algorithm.
0 20 40 60 80 100 120 140 160 180 200
0
50
100
150
200
250
300
350
400
450
500
Error of the generated behaviour using the standard viterbi and the windowed Viterbi
Number of Frame
Euclidean Distance (mm)
Standard Viterbi
Windowed Viterbi
Figure 8: Error of the generated behaviour (in mm). Push-
ing behaviour. The error of generated behaviour using the
standard Viterbi algorithm is shown in solid line, the dash
line is for using the windowed Viterbi algorithm.
2. From the above three figures, it is possible to
see that the generated motion using the windowed
Viterbi algorithm has a small delay compared with
the generated motion using the standard Viterbi
algorithm. However, this delay is not noticeable
in the generated motion sequences.
3. Although the error for the standard Viterbi algo-
rithm is similar in most of the frames, in some
frames the windowed Viterbi algorithm produces
smaller error. After inspecting the generated mo-
Table 1: Evaluation Results. The generated motions are
generated using the windowed Viterbi algorithm.
Motion Comments
Shaking hands 2/10 - generated person did not touch
another at the beginning of shaking
hands
2/10 - generated motion is wobbly
Pushing 2/10 - generated motion is floaty
Pulling no comments
tion sequences visually, we discovered that such
frames corresponded to sudden changes in the
motion. We conclude that the windowed Viterbi
algorithm can cope with sudden changes in mo-
tion better as it uses less history of motion. In
future, we are planning to take advantage of this
observation by developing a generated algorithm
with adaptive window size.
4.2 Visual Evaluation
Our goal was to evaluate how convincing the gener-
ated motion was from the point of view of an indepen-
dent observer. For this purpose, we generated six test
video sequences, three of which showed original Mo-
Cap data collected from two people performing hand-
shake, pushing, and pulling actions. In the remaining
three sequences the MoCap data of the second per-
son was substituted with motion data generated us-
ing the windowed Viterbi algorithm described in this
article. All videos showed only the motion of cer-
tain points on the body, not the whole body, which is
acceptable for visual evaluation according to Johans-
son’s (Johansson, 1973) experiments in psychology.
Each of the above video sequences was shown to ten
independent observers. The observers were told that
the videos showed the motion data of two people per-
forming some action and were asked to identify which
action that was. They were also asked to comment
if they noticed anything strange or unusual about the
motion of the people. All ten subjects were able to
identify the actions in all six videos correctly. The
comments of the independent observer are shown in
Table 1. Table 2 shows our previous evaluation re-
sults which the results motion were generated using
the standard Viterbi algorithm.
From these results, we conclude that the gener-
ated behaviours using the windowed Viterbi algo-
rithm looked very similar to the real behaviours as
eight out of ten people did not notice anything un-
usual about the generated behaviours.
GENERATING HUMAN INTERACTIVE BEHAVIOURS USING THE WINDOWED VITERBI ALGORITHM
357

Table 2: Evaluation Results. The generated motions are
generated using the standard Viterbi algorithm.
Motion Comments
Shaking hands 5/10 - generated motion is floaty
Pushing 3/10 - original motion is wobbly
1/10 - generated person did not touch
another
Pulling no comments
5 CONCLUSIONS AND FUTURE
WORK
In this paper, we presented a new approach for gener-
ating interactive behaviours for virtual characters us-
ing the windowed Viterbi algorithm. We also com-
pared the performance of the standard Viterbi algo-
rithm and the windowed Viterbi algorithm.
To this end, we trained a dual HMM representing
interactive behaviours of two people. Then we used a
sequence of 3D poses of a person in conjunction with
dual HMM to generate the responsive behaviour for
a virtual character using the windowed Viterbi algo-
rithm. From the analysis of the results and evaluation
experiments, it is clear that the windowed Viterbi al-
gorithm can generate very similar behaviours to the
real behaviours. In addition, the windowed Viterbi
method does not require the full observation sequence
before the processing starts, thus it can be used in a
real-time system.
In our new work, we take advantage of the win-
dowed Viterbi algorithm in a new approach to mod-
elling motion with a goal of obtaining better tracking
and generating results.
REFERENCES
Cosker, D., Marshall, D., Rosin, P. L., and Hicks, Y. (2004).
Speech driven facial animation using a hidden markov
coarticulation model. IEEE ICPR, 1:314–321.
Deutscher, J., Blake, A., and Reid, I. (2000). Articulated
Body Motion Capture by Annealed Particle Filtering.
IEEE CVPR Proceedings, 2:126–133.
Jebara, T. and Pentland, A. (2002). Statistical Imitative
Learning from Perceptual Data. Proceedings of the
2nd International Conference on Development and
Learning.
Johansson, G. (1973). Visual perception of biological mo-
tion and a model for its analysis. Perception and Psy-
chophysics, 14(2):201–211.
Johnson, N., Galata, A., and Hogg, D. (1998). The acqui-
sition and use of interaction behaviour model. IEEE
CVPR Proceedings, pages 866–871.
Meredith, M. and Maddock, S. (2005). Adapting motion
capture data using weighted real-time inverse kine-
matics. Comput. Entertain., 3(1):5–5.
Pilu, M. (2004). Video stabilization as a variational problem
and numerical solution with the viterbi method. IEEE
CVPR, 1:625–630.
Rabiner, L. R. (1989). A tutorial on hidden markov models
and selected applications in speech recognition. IEEE
Proceedings, 77(2):257–286.
Rybski, P. E. and Veloso, M. M. (2005). Robust real-
time human activity recognition from tracked face dis-
placements. Proceedings of the 12th Portuguese Con-
ference on Artificial Intelligence, pages 87–98.
Wen, G., Wang, Z., Xia, S., and Zhu, D. (2006). From
motion capture data to character animation. VRST ’06:
Proceedings of the ACM symposium on Virtual reality
software and technology, pages 165–168.
Zheng, Y., Hicks, Y., Cosker, D., Marshall, D., Mostaza,
J. C., and Chambers, J. A. (2006). Virtual
friend: Tracking and generating natural interactive be-
haviours in real video. IEEE ICSP.
Zordan, V. B. and Horst, N. C. V. D. (2003). Mapping op-
tical motion capture data to skeletal motion using a
physical model. pages 245–250.
GRAPP 2008 - International Conference on Computer Graphics Theory and Applications
358
