
DETERMINATION OF THE VISUAL FIELD
OF PERSONS IN A SCENE
Adel Lablack, Frédéric Maquet and Chabane Djeraba
LIFL-UMR USTL-CNRS 8022, Laboratoire d’Informatique Fondamentale de Lille , Université de Lille 1, France
Keywords: Visual Field, Video Analysis, Quaternions.
Abstract: The determination of the visual field for several persons in a scene is an important problem with many
applications in human behavior understanding for security and customized marketing. One such application,
addressed in this paper, is to catch the visual field of persons in a scene. We obtained the head pose in the
image sequence manually in order to determine exactly the visual field of persons in the monitored scene.
We use knowledge about the human vision, trigonometrical relations to calculate the length and the height
of the visual field and quaternion approach for doing several changes of reference marks. We demonstrate
this technique using a data set of videos taken by surveillance cameras on shops.
1 INTRODUCTION
In applications where human activity is under
observation of a static camera, knowledge about
where a person is looking provides observers
important information which allows accurate
explanation of the scene activity and human interest.
A tool that automatically measures the products
shown by a person in a shop without being bought
for example would be very valuable, but does not
currently exist. It will optimise and personalize the
internal organization of the shops / supermarkets in
order to improve the competitiveness.
The paper is organized as follows. First, we
highlight in Section 2 relevant works in this, and
associated, area(s). We then describe the head-pose
and eye location in section 3. Section 4 provides the
method used for determining the visual field and the
one used to make the several changes of reference
marks. Throughout the paper we performed tests
using samples provided from surveillance cameras
and summarise some experimental results in section
5. Finally, we conclude and discuss potential future
work in section 6.
2 RELATED WORK
Determining the visual field in surveillance images
is a challenging problem that has received little or no
attention to date. Preliminary work in this specific
domain was reported in (Robertson et al., 2005).
Our work determines the visual field of a person.
However, there is an abundance of literature
concerning the two tasks needed before the
determination of the visual field: multi-person
tracking and head pose tracking.
The multi-person tracking should locate and
track several persons overtime in the monitored
scene. Different approaches try to solve this problem
with varying degrees of success (Moeslund et al.,
2006).
Head-pose tracking is the process of locating a
person’s head and estimating its orientation in space
overtime (Liang et al., 2004). It can be categorized
in two of the following ways:
Feature-based (Horprasert et al., 1996), (Gee
and Cipolla, 1994), (Stiefelhagen et al., 1996)
vs. Appearance based approaches (Rae and
Ritter, 1998), (Srinivasan and Boyer, 2002),
(Brown and Tian, 2002).
Parallel (Yang and Zhang, 2001), (Ba and
Odobez, 2005) vs. Serial approaches (Zhao et
al., 2002).
The determination of the visual field concerns
several domains like advertising and psychology, as
a person’s visual field is often strongly correlated
with his behavior or activity. Some works on the
estimation of the focus of attention of a person were
attempted by (Robertson et al., 2005) and (Smith et
al., 2006).
313
Lablack A., Maquet F. and Djeraba C. (2008).
DETERMINATION OF THE VISUAL FIELD OF PERSONS IN A SCENE.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 313-316
DOI: 10.5220/0001083103130316
Copyright
c
SciTePress
3 HEAD POSE
We represent the head pose of a person by a
reference marks (x
i, yi, zi) characterized by
ψ
,
φ
and
θ
which represent respectively the angles
around the axes of the camera reference marks (x, y,
z). The x axis corresponds to the bottom-up
movement, the y axis to the right-left movement and
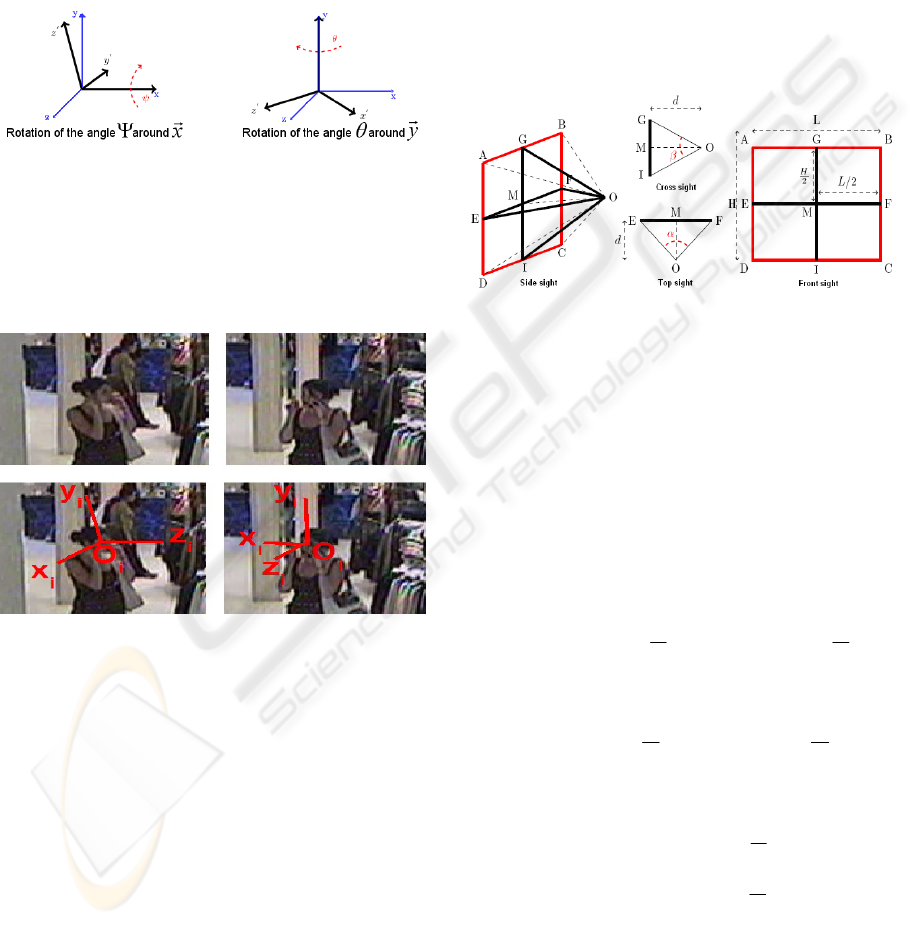
the z axis to the profile movement (see figure 1).
Figure 1: Rotation of the x axis and y axis for the head
pose determination.
The figure 2 illustrates the reference marks
associated to a person in 3 consecutive frames with
the eyes represented by the point O the middle of the
segment which links the centre of the two eyes.
Figure 2: Person reference marks.
4 VISUAL FIELD
DETERMINATION
We present in this section some features of the
human vision system. These features will able us to
calculate the length and the height of the visual field.
4.1 Visual Field Features
The visual field is the peripheral space seen by the
eye. It extends normally from 60° in top, 70° in low
and 90° approximately laterally. The common field
of the two eyes is called binocular field of view and
extends on 120° broad. It is surrounded by two
monocular field of view of approximately 30° broad
(Panero and Zenik, 1979).
4.2 Visual Field Calculation
We consider the zone seen by a person as a rectangle
ABCD. The eyes are represented by the point O. Let
d be the distance between the point O and the
rectangle ABCD. The goal is to calculate the length
(L) and the height (H) of the visual field. According
to the distance d, we calculate the coordinates of the
points A, B, C and D in the person reference marks.
We represent that by a tetrahedron OABCD (see
figure 3).
Figure 3: Different sights of the tetrahedron OABCD.
At a distance d we note by M the point located at
the opposite of the eyes (MO=d). The point M is the
centre of the rectangle ABCD. Let E and F the
mediums of respectively the segments [AD] and
[BC]. From the top sight we observe that M is the
middle of the segment [EF]. Let also G and I the
mediums of respectively the segments [AB] and
[DC]. From the cross sight we observe that M is also
the middle of the segment [GI]. So we can deduce
the following relations from the top sight and the
cross sight:
2
ˆˆ
and
2
ˆˆ
β
α
==== IOMGOMEOMFOM
Applying the trigonometrical relations, we have:
2
tan. and
2
tan.
β
α
dMGdMF ==
So, we can deduce the length and the height:
2
tan.22
α
dMFL ==
2
2d.tan2H
β
== MG
The calculation of the length and the height of
the visual field of a person needs three values which
are the distance d (distance from the first obstacle),
the angles α (equal to 120°) and the angle β (equal to
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
314

60°). These two angles correspond to the field of
view of the binocular vision for a human.
4.3 Input Parameters
We must make some assumptions to calculate the
visual field of a person. The camera is fixed, and we
consider that we know the location of the eyes of the
person, his position and the distance d which
separates him from anyone or the nearest obstacle at
an instant t. We need also to know the coordinates
(x
i, yi, zi) of the person where xi and yi are the
relative positions of the point O (the middle of the
segment which links the centre of the two eyes) in
the frame and z
i the distance between the point O
and the camera. The head pose is characterized by
ψ
,
φ
and
θ
which represent respectively the
angles around the x axis, the y axis, and the z axis; as
shown in Figure 4.
Figure 4: Representation of the reference marks.
We use in addition the size of the frame to keep
the scale during the representation of the visual field.
4.4 Geometrical Transformations
As the person moves at every frame, we have to
integrate the values of the swing angles of his head
pose compared to the reference marks of the camera.
We need geometrical transformations to pass from
the camera reference marks to the person reference
marks and vice versa. The method chosen is based
on quaternions (Girard, 2004) due to the unique
representation of the head pose.
Quaternions, denoted H, are a type of
hypercomplex numbers. A quaternion Q can be
described like a quadruplet of real numbers and
written in the form: a.1 + b.i + c.j + d.k with (a, b, c,
d)
4
ℜ∈
and i² = j² = k² = ijk = -1. It exists only one
way to write Q in this form and any quaternion
comprising the same characteristics is logically
equal to Q (the reciprocal one is also true). The
triplet (b, c, d) is the vector
V
r
of Q (or its vectorial
part). So we note Q by (a,
V
r
).
Using this notation, we establish a
correspondence between the use of quaternions and
the composition of vectorial rotations. A vectorial
rotation is done around a vector which passes by the
origin of the reference marks. We need 3 values (x,
y, z) to represent a vector
V
r
in 3D reference marks
and a swing angle α of an unspecified point around
the vector
V
r
.
If the rotation is carried out around an axis
oriented according to the vector
V
r
, the associated
quaternion is written as follow:
kNjNiNQ
zyx
2
sin
2
sin
2
sin
2
cos
α
α
α
α
+++=
]...[
2
sin
2
cos
zyx
NkNjNiQ +++=
α
α
In order to use this equivalence it is necessary to
normalize Q (||Q|| = 1).
The formula above gives the coordinates of the
vector
V
r
after one vectorial rotation (see Figure5):
)(..'
],[
*
VRotQVQV
N
r
r
r
α
==
)
2
sin,
2
).(cos,).(
2
sin,
2
(cos NVON
r
r
r
α
α
α
α
−=
Figure 5: Example of rotation of the visual field around
the y axis using quaternion approach.
In order to determine the coordinates of the
vector
V
r
after n rotations of the axes N1, N2,…,Nn
with the angles α
1, α2,…,αn we use the following
formula:
))))((...((
],[],[],[
2211
NRotRotRotV
nn
NNN
r
r
rrr
ααα
=
)().,0).((
1
*
1
)1(
∏∏
==
+−
=
n
i
i
n
i
in
QVQ
r
With:
)
2
sin,
2
(cos
i
ii
i
NQ
r
α
α
=
)
2
sin,
2
(cos
*
i
ii
i
NQ
r
αα
−=
DETERMINATION OF THE VISUAL FIELD OF PERSONS IN A SCENE
315

5 EXPERIMENTAL RESULTS
We represent the visual field by a quadrilateral (a
rectangle in the case of a front glance or trapezoidal
form in other cases). We have tested this method on
various datasets (see figures 2, 4, 5 and 6). Finally,
we demonstrate the method on videos taken in a
shop for 3 customers, in figure 6. This example
confirms that when the obstacle is placed far from a
person, the length and the height of his visual field
increase.
Figure 6: This final example demonstrates the method in a
shop for 3 customers.
6 CONCLUSIONS
In this paper, we have established that information
about the head pose and the estimated distance can
be used to compute the visual field of persons. We
demonstrate on a number of datasets that we obtain
the visual field of persons at a distance.
Our future work will focus on an accurate
method to detect automatically the head pose of the
persons. We will also combine this advance with
human behavior recognition to aid automatic
reasoning in video.
ACKNOWLEDGEMENTS
This work has been supported by the European
Commission within the Information Society
Technologies program (FP6-2005-IST-5), through
the project MIAUCE (www.miauce.org).
REFERENCES
Ba, S., Odobez, J., 2005. Evaluation of multiple cues
head-pose tracking algorithms in indoor environments.
In Proc. of Int. Conf. on Multimedia and Expo
(ICME), Amsterdam.
Brown, L., Tian, Y., 2002. A study of coarse head-pose
estimation. In Workshop on Motion and Video
Computing.
Gee, A., Cipolla, R., 1994. Estimating gaze from a single
view of a face. In Proc. International Conference on
Pattern Recognition (ICPR), Jerusalem.
Girard, P.K., 2004. Quaternions, algèbre de Clifford et
physique relativiste. PPUR.
Horprasert, A.T., Yacoob, Y., Davis, L.S., 1996.
Computing 3D head orientation from a monocular
image sequence. In Proc. of Intl. Society of Optical
Engineering (SPIE), Killington.
Liang, G., Zha, H., Liu, H., 2004. 3D model based head
pose tracking by using weighted depth and brightness
constraints. In Image and Graphics.
Moeslund, T.B., Hilton, A., Krüger, V., 2006. A survey of
advances in vision-based human motion capture and
analysis. In Computer Vision and Image
Understanding.
Panero, J., Zenik, M., 1979. Human dimension and
interior space, Withney Library of design,
Architectural Ltd. London.
Rae, R., Ritter, H., 1998. Recognition of human head
orientation based on artificial neural networks. In
IEEE Trans. on Neural Networks, 9(2):257–265.
Robertson, N.M., Reid, I.D., Brady, J.M., 2005. What are
you looking at? Gaze recognition in medium-scale
images, In Human Activity Modelling and
Recognition, British Machine Vision Conference.
Smith, K., Ba, S.O., Gatica-Perez, D., Odobez, J-M., 2006.
Tracking the multi person wandering visual focus of
attention. In ICMI '06: Proceedings of the 8th
international conference on Multimodal interfaces,
Banff.
Srinivasan, S., Boyer, K., 2002. Head-pose estimation
using view based eigenspaces. In Proc. of Intl.
Conference on Pattern Recognition (ICPR), Quebec.
Stiefelhagen, R., Finke, M., Waibel, A., 1996. A model-
based gaze tracking system. In Proc. of Intl. Joint
Symposia on Intelligence and Systems.
Yang, R., Zhang, Z., 2001. Model-based head-pose
tracking with stereo vision. In Technical Report MSR-
TR-2001-102, Microsoft Research.
Zhao, L., Pingali, G., Carlbom, I., 2002. Real-time head
orientation estimation using neural networks. In Proc.
of the Intl. Conference on Image Processing (ICIP),
Rochester, NY.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
316
