
MULTIREGION GRAPH CUT IMAGE SEGMENTATION
Mohamed Ben Salah
1
, Ismail Ben Ayed
2
and Amar Mitiche
3
1,3
Institut National de la Recherche Scientifique, INRS-EMT, 800 De La Gauchetire Ouest , Montral, QC, H5A 1K6, Canada
2
GE healthcare, 268 Grosvenor, E5-137, London, ON, N6A 4V2, Canada
Keywords:
Combinatorial optimization, graph cuts, parametric modeling, image segmentation.
Abstract:
The purpose of our study is two-fold: (1) investigate an image segmentation method which combines paramet-
ric modeling of the image data and graph cut combinatorial optimization and, (2) use a prior which allows the
number of labels/regions to decrease when the number of regions is not known and the algorithm initialized
with a larger number. Experimental verification shows that the method results in good segmentations and runs
faster than conventional graph cut methods.
1 INTRODUCTION
Image segmentation occurs in many important ap-
plications. It consists of partitioning an image into
regions homogeneous with respect to a given de-
scription. Energy minimization formulations have
led to flexible, transparent, and effective algorithms.
These formulations can be divided into two broad
categories: continuous and discrete (Zhu and Yuille,
1996) (Ayed et al., 2006) (Chan and Vese, 2001)
(Boykov et al., 2006). Continuous formulations,
which seek a partition of the image domain by active
curves via a level set representation, have segmented
accurately a variety of difficult images.
Discrete formulations use objective functions
which contain terms similar to those in continuous
formulations, generally a data term which measures
the conformity of a segmentation to the image data,
and a regularization term. A graph cut formulation
states segmentation as a labeling problem. The graph
cut algorithm assigns each pixel a grey level label
in the set of all possible labels. Thus, the optimiza-
tion of the objective function results in a segmenta-
tion described by a subset of the set of possible labels.
Since no explicit number of regions guides the algo-
rithm, the solution is generally an implicit overseg-
mentation. Also, the use of a set of all possible labels
lengthens the execution time unnecessarily. When the
number of regions is known, one can reduce the num-
ber of labels to equal the number of regions. Regions
can then be described by positive parametric func-
tions, in which case, the data term of the objective
function measures the conformity of the image data
to a parametric model in each region. This formula-
tion was used to state the problem of concurrent seg-
mentation and estimation of image motion (Schoen-
emann and Cremers, 2006). This formulation leads
to an optimization which iterates two steps: contin-
uous optimization with respect to the region parame-
ters and segmentation by discrete graph cut optimiza-
tion. However, the regularization term in (Schoene-
mann and Cremers, 2006), which estimates the length
of the segmentation boundaries assumes the number
of regions known. When the number of regions is not
known beforehand, one sensible formulation would
be to use a larger number initially, to be decreased by
the graph cut optimization algorithm (Boykov et al.,
2001). However, and contrary to the priors used in
(Boykov et al., 2001), the length prior does not allow
this, in general, because merging two disjoint regions
does not change the value of the prior.
The purpose of our study is two-fold: (1) investi-
gate image segmentation which combines parametric
modeling of the image data and graph cut combinato-
rial optimization and (2) use a prior which allows the
number of labels/regions to decrease when the num-
ber of regions is not known and the algorithm initial-
ized with a larger number. As in (Schoenemann and
535
Ben Salah M., Ben Ayed I. and Mitiche A. (2008).
MULTIREGION GRAPH CUT IMAGE SEGMENTATION.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 535-538
DOI: 10.5220/0001081605350538
Copyright
c
SciTePress
Cremers, 2006), the method iterates two steps: closed
form region parameters update and segmentation by
graph cut combinatorial optimization but our regular-
ization term allows region merging.
2 OBJECTIVE FUNCTION
As in (Boykov et al., 2001), and other studies as well
(Chan and Vese, 2001), the objective function con-
tains two terms: a data term to measure the confor-
mity of the segmentation to a parametric model, a
piecewise constant model in this case, and a regular-
ization term to bias the segmentation toward partitions
of the image domain with fewer boundary edges. The
goal is to segment the image into a fixed but arbitrary
number of regions using graph cut optimization of the
objective function. To do so, we use a labeling func-
tion λ : Ω −→ L so that each pixel p ∈ Ω is assigned
the label λ(p) in a finite set of labels L of cardinal-
ity N
reg
equal to the number of regions. Let R
l
be the
region of pixels with label l. The solution of the min-
imization, or the final labeling, can be represented ei-
ther by the function λ or the partition P = {R
l
| l ∈ L },
where R
l
= {p ∈ Ω | λ(p) = l}. The energy functional
to minimize, is formulated using the labeling function
λ, a data term and the regularization term, R :
F (λ) =
∑
p∈Ω
D
p
(λ(p)) + α R (λ) (1)
where α is a positive weight. Typically, D
p
(λ(p)) is
(µ
l
− I
p
)
2
, where I
p
is the intensity at pixel p and µ
l
is the value of the label assigned to region R
l
for 1 ≤
l ≤ N
reg
. We use the following regularization term:
R (λ) =
∑
{p,q}∈N
r
{p,q}
(λ(p),λ(q)) (2)
where N is the neighborhood set. Function
r
{p,q}
(λ(p),λ(q)) is a smoothness regularization
function. We consider a regularization function
which is piecewise smooth. More precisely, we
consider the truncated squared absolute difference
model r(λ(p),λ(q)) = min(const,|µ
λ(p)
− µ
λ(q)
|
2
)
where const is, in all experimentations, the same used
in (Boykov et al., 2001). The objective function can
be written, for 1 ≤ l ≤ N
reg
, as follows:
F ({µ
l
},λ) =
∑
l∈L
∑
p∈R
l
(µ
l
− I
p
)
2
+ α
∑
{p,q}∈N
r
{p,q}
(λ(p),λ(q))
(3)
3 MINIMIZATION
Minimization of functional (1) is done by alternating
graph cut optimization for segmentation and updating
of labels via continuous optimisation. Given the seg-
mentation, regions parameters are estimated accord-
ing to a closed-form solution. Given the parameters,
the segmentation is updated by graph cut optimiza-
tion.
3.1 Labels Updating
Given a segmentation, a labeling λ is an assignment
of a label λ(p) to each pixel p of the image domain
Ω. Equivalently, it is a partition of Ω into disjoint re-
gions R
l
where l is the label assigned to pixels of the
region R
l
. The process of updating labels consists in
estimating these parameters in a way to optimize the
functional when the segmentation is given.
To optimize the functional (3) for a given segmenta-
tion, we proceed by derivation towards the value of a
label µ
l
:
∂F ({µ
l
},λ)
∂µ
l
= 2
∑
p∈R
l
(µ
l
− I
p
) +
2α
∑
{p,q}∈N ,λ(p)=l
|µ
λ(p)
−µ
λ(q)
|<const
(µ
λ(p)
− µ
λ(q)
) (4)
We choose a neighborhood system, N , of size 4 and
let N
p
be the set of pixels q neighbors of p which
are assigned a label λ(q) different from, λ(p), the la-
bel assigned to p and verifying |µ
λ(p)
−µ
λ(q)
| < const.
Consequently, equation (4) can be written as
∂F
∂µ
l
= 2
∑
p∈R
l
(µ
l
− I
p
) + 2α
∑
p∈C
l
∑
q∈N
p
(µ
l
− µ
λ(q)
) (5)
where C
l
is the boundary of the region R
l
. The la-
bel value optimizing the functional, given a segmenta-
tion, is deduced from the last equation and expressed
in a closed-form as follows
µ
l
=
∑
p∈R
l
I
p
+ α
∑
p∈C
l
∑
q∈N
p
µ
λ(q)
♯R
l
+ α
∑
p∈C
l
♯N
p
(6)
where ♯ designates set cardinality.
3.2 Graph Cuts Segmentation Updating
Graph cut optimization was introduced by Greig et
al. (Greig et al., 1989) for image restoration. We
use the algorithm of (Boykov et al., 2001) which has
been used successfully in several vision applications.
The algorithm functions as follows. Let G = hV , E i
be a weighted graph where V is the set of vertices
(nodes) and E the set of edges. V contains a node
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
536

for each pixel and two additional nodes called termi-
nals. There is an edge {p,q} between any two distinct
nodes p and q. A cut C ⊂ E is a set of edges verify-
ing:
• Terminals are separated in the graph G (C ) =
hV ,E \ C i
• No subset of C separates terminals in G (C )
The minimum cut problem consists in finding the cut
C in a given graph with the lowest cost. The cost of a
cut, |C |, is the sum of its edges weights.
In (Boykov et al., 2001), Boykov et al. present two
algorithms based on graph cuts which find a local
minimum of the objective function (3) with respect to
two kinds of large moves: expansion moves and swap
moves. Large moves proceed by changing labels of a
large set of pixels simultaneously to decrease the ob-
jective function. In this work, we use the algorithm
based on swap moves because it handles more gen-
eral energy functionsand deals with the regularization
function that we have chosen.
4 EXPERIMENTATION
To validate the advantages of the method, we present
first experiments with synthetic data for noisy piece-
wise constant images. Then we experiment with real
images. The initialization starts with an arbitrary par-
tition of the desired number of regions to which arbi-
trary labels are assigned. the unique free parameter is
the regularization term penalty α.
4.1 Synthetic Data
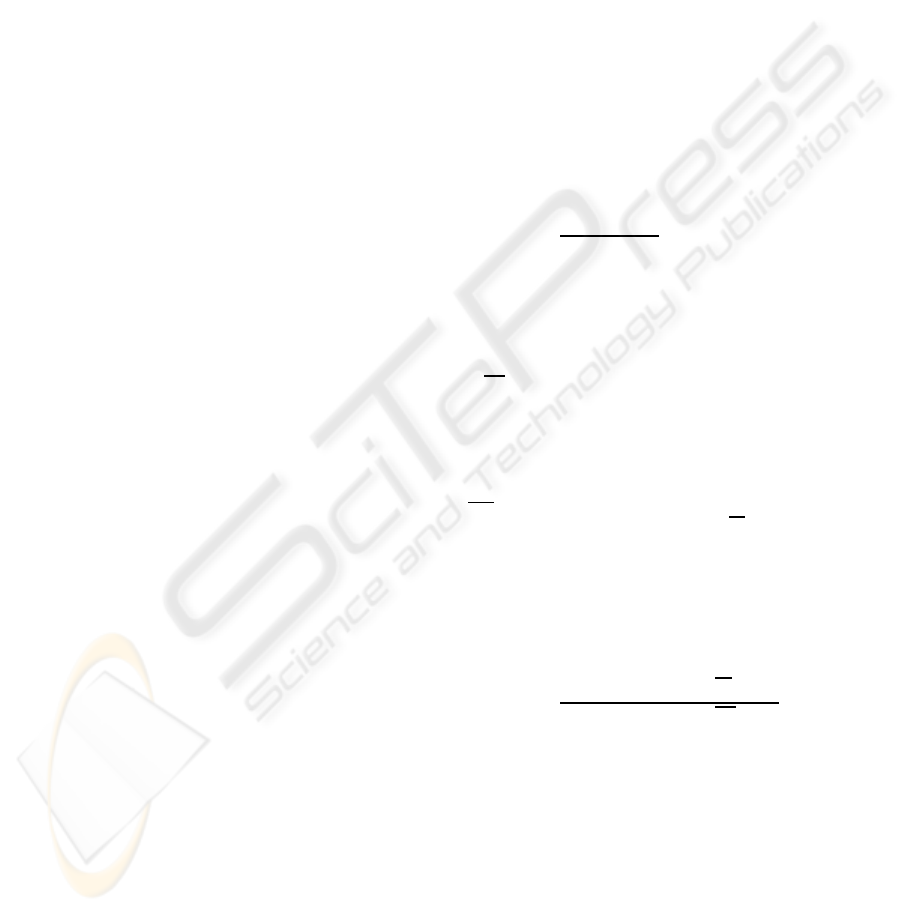
Figure 1 shows synthetic images representing geo-
metric shapes in the first row, the segmentations ob-
tained using the method of (Boykovet al., 2001) in the
second row and the results of the segmentations with
our method in the third row. Contrary to the method
of (Boykov et al., 2001) which uses a set of labels
corresponding to all the possible grey levels, we have
the possibility to initialize the process of segmenta-
tion with the right number of regions, which is known
here, and with an arbitrary set of regions parameters.
The method of (Boykov et al., 2001) allows the num-
ber of labels to decrease due to the regularization term
but it initializes with the set of labels correspondingto
all possible grey levels, i.e., 256 grey levels. The final
segmentation is described by a subset of the initial set
of labels and is an implicit oversegmentation since no
explicit number of regions guides the segmentation.
As shown in figures 1(e)-(h), the segmentation is de-
scribed, in all cases, by a number of regions which is
much larger than the right number of regions: figure
1(e) is segmented into 98 regions, 1(f) is segmented
into 51 regions, 1(g) is segmented into 58 regions and
1(h) is segmented into 53 regions. On the other hand,
our method allows regions parameters to vary jointly
with the segmentation; thus, the initial set of labels is
arbitrarily chosen and the number of regions is fixed
equal to the right number.
In addition to that, our method realizes a big improve-
ment in term of running time since we deal with a
small number of regions compared to the method of
(Boykov et al., 2001). We show in Table 1 the running
times of the method of (Boykov et al., 2001) and our
method in the case of figures 1(a)-(d) and the corre-
sponding energies at convergence. In all these exam-
ples, the region merging process allows segmentation
of the images into the right number of regions and we
obtain exactly the same energy and regions parame-
ters at convergence in much less running time.
4.2 Real Data
Though the number of regions is not known, in gen-
eral, for real data, and consequently cannot be fixed in
advance, in most applications a maximum number of
regions is known, i.e., we know that the actual num-
ber of regions is less than some maximum number.
This maximum number is in all cases much smaller
than the number of all possible grey levels as used
in (Boykov et al., 2001). In this section, we deal with
real images and, depending on the application, we ini-
tialize with a number of regions that we consider large
enough to segment the image into an acceptable num-
ber of regions.
The method of (Boykov et al., 2001) is unable to seg-
ment these images into the desired number of regions
and it gives, in all cases, an oversegmentation, in ad-
dition to the much larger time that it takes to converge.
An image such as Figure 2(a) presents smooth varia-
tion of intensity inside the region of interest. Meth-
ods without control on the number of regions frag-
ment that region into multiple segments. The image
in figure 2(c) presents the biggest running time and
takes 2.90 seconds which is very small compared to
the method of (Boykov et al., 2001) that takes, for the
same image, more than 220 seconds because it deals
with all the possible grey levels and segments it into
200 segments.
MULTIREGION GRAPH CUT IMAGE SEGMENTATION
537
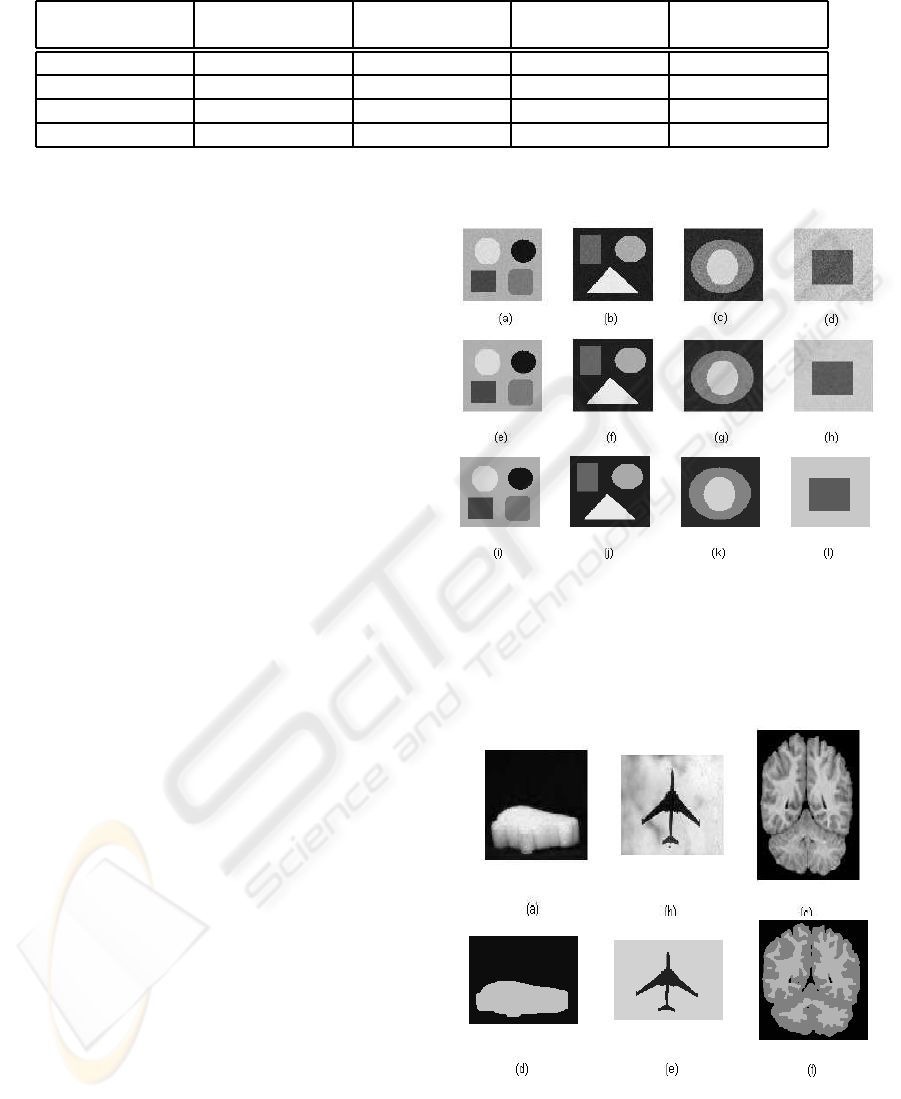
Table 1: Running time and energies of the two methods for synthetic images.
Number of re-
gions
CPU(s): Boykov
et al.
CPU(s): our
method
Energy: Boykov
et al.
Energy: our
method
5 136.12 2.36 15.738 17.640
4 110.01 0.31 14.210 15.701
3 132.40 0.28 27.295 32.784
2 124.90 0.12 32.396 40.650
5 CONCLUSIONS
We presented an image segmentation method which
combines the continuous optimization methods effi-
ciency in describing the segmentation with the com-
putational efficiency of graph cuts methods. It al-
lows initializing with just the needed number of re-
gions when it is known or with a larger number oth-
erwise. Parameters vary jointly with the optimization
and convergence is relatively rapid.
REFERENCES
Ayed, I. B., Hennane, I., and Mitiche, A. (2006). Unsu-
pervised variational image segmentation/classification
using a weibull observation model. IEEE Trans. on
Image Proc., 15(11):3431–3439.
Boykov, Y., Kolmogorov, V., Cremers, D., and Delong, A.
(2006). An integral solution to surface evolution pdes
via geo-cuts. In ECCV (3), volume 3953, pages 409–
422. Springer.
Boykov, Y., Veksler, O., and Zabih, R. (2001). Fast approxi-
mate energy minimization via graph cuts. IEEE Trans.
on PAMI, 23(11):1222–1239.
Chan, T. F. and Vese, L. A. (2001). Active contours without
edges. IEEE Trans. on Image Proc., 10(2):266–277.
Greig, D. M., Porteous, B. T., and Seheult, A. (1989). Exact
maximum a posteriori estimation for binary images.
Jour. of the Roy. Stat. Soc., 51(2):271–279.
Schoenemann, T. and Cremers, D. (2006). Near real-time
motion segmentation using graph cuts. In Pattern
Recognition (Proc. DAGM), volume 4174 of LNCS,
pages 455–464, Berlin, Germany. Springer.
Zhu, S. C. and Yuille, A. (1996). Region competetion:
Unifying snakes, region growing, and bayes/mdl for
multiband image segmentation. IEEE Trans. on PAMI,
18(9):884–900.
Figure 1: Synthetic images with gaussian noise: (a) 5 re-
gions; (b) 4 regions; (c) 3 regions; (d) 2 regions; (e)-(h):
segmentations with Boykov et al. method; (i)-(l): segmen-
tations with our method. Images size: 128× 128. α = 1.2.
Figure 2: Real data: (a) 2 regions; (b) 2 regions; (c) 3
regions; (d)-(f): segmentations with our method. Images
sizes: (a)154× 115, (b)288× 193, (c)142× 144. α = 2.2.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
538
