
A PDES METHOD PRESERVING BOUNDARIES ON DENSE
DISPARITY MAP RECONSTRUCTION
Ji liu
1,2
, Junjian Peng
1,2
, Yuechao Wang
2
and Yandong Tang
2
1
Graduate University of Chinese Academy of Sciences, Beijing 100039, China
2
Shenyang Institute of Automation, Chinese Academy of Sciences Shenyang 110016, China
Keywords: Disparity map reconstruction, PDEs, GCPs.
Abstract: Over smoothness restricts the application of PDEs in the field of dense disparity map reconstruction,
because disparity map reconstruction usually requires preserving discontinuousness in some areas such as
the boundaries of objects. To preserve disparity discontinuousness, this paper adopts two strategies. Firstly,
ground control points (GCPs) are introduced as the soft constraint. Secondly, this paper designs a structure
of smoothness part in energy functional, which can preserve discontinuousness effectively. Moreover, the
adjustable parameters in the smoothness part advance its robustness. In experiments, we compare proposed
method with graph cuts method and prove that PDEs is also a useful solution for disparity map
reconstruction and has the advantage of dealing with smooth images.
1 INTRODUCTION
Dense disparity map reconstruction based on two
intensity images is the fundamental research in
stereo vision. It can be described as matching each
point in one image with its correspondent point in
the other one. According to the epipolar constraint,
all possible correspondent points lie in the same line.
Thus, the matching relationship can be described as
the disparity surface D(x,y).
Over the years, numerous algorithms with energy
functional optimization have been investigated in
dense reconstruction via two or more images. In
order to find the best disparity surface, many
researches focus on functional optimization. Graph
cuts and belief propagation, as two discrete
functional optimization methods, have become two
mainstream methods and won academic recognition
(
Marshall and William, 2003). In the field of disparity
map reconstruction, the top contenders for the best
disparity map estimation, on the most common
comparison data, either use belief propagation (Sun
et al., 2003) or graph cuts (Boykov et al., 2001).
Many researches discuss the application of graph
cuts (Roy and Cox, 1998; Birchfield and Tomasi,
1999; Kim et al., 2003) and belief propagation (Sun
et al., 2003; Klaus et al., 2006; Frey et al., 2002;
Felzenszwalb and Huttenlokcher, 2006) in disparity
map reconstruction. Two papers (Kolmogorov and
Zabih, 2004) and (Boykov, 2001) play the important
role in the theory and application of graph cuts. In
(Kolmogorov and Zabih, 2004), the author gives a
precise characterization of what function can be
minimized via graph cuts, and in (Boykov, 2001) the
author introduces two efficient approximation
algorithms to find a local minimum based on graph
cuts. In paper (Sun et al., 2003; Frey et al., 2002;
Felzenszwalb and Huttenlokcher, 2006), the authors
propose some fast and effective approximation
algorithms for belief propagation. Overall, two
methods have been studied broadly and can be
considered as comparatively mature algorithms in
disparity map reconstruction. This paper harvests
considerable profits from their works.
PDEs mothed, as a continuous functional
optimization method, has been applied successfully
in image segmentation (Aubert et al., 2002; Maso et
al., 1992; Kass et al., 1988), 3D reconstruction
(Faugeras and Keriven, 1998; Deriche et al., 1997;
Faugeras and Keriven, 2002), and image recovery
(Aubert and Vese, 1997). However, compared with
graph cuts and belief propagation, PDEs has not
been applied broadly in the disparity map
reconstruction. The PDEs method always assumes
that images can be approximately considered as
continuous functions. Regrettably, the assumption
often can not be satisfied in the disparity map
reconstruction, since the ultimate disparity map
result needs to preserve discontinuousness in some
disparity mutation areas such as the object’s
655
liu J., Peng J., Wang Y. and Tang Y. (2008).
A PDES METHOD PRESERVING BOUNDARIES ON DENSE DISPARITY MAP RECONSTRUCTION.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 655-661
DOI: 10.5220/0001080606550661
Copyright
c
SciTePress

boundaries. Thus, PDEs method performs very well
in those fields where images are fit to be considered
as continuous function but is not very effective in
disparity map reconstruction. This reason leads to
fewer researches on PDEs application in this field
than graph cuts and belief propagation.
Since PDEs method has its advantage in dealing
continuous situation, this paper still adopts this
method to estimate the disparity map. We hope to
benefit from its advantage and avoid its drawback.
Although we assume that images are continuous
functions, the disparity map calculated via images
can still generate discontinuousness to meet the
expected disparity map. Robert and Deriche (Robert
and Deriche, 1996), in order to preserve
discontinuous boundaries, design the smoothness
function to satisfy that all points should diffuse
mainly in the orthogonal direction of disparity
gradient. Alvarez L. et al. (Alvarez et al., 2000) use
the smoothness function introduced by Nagel and
Engelmann which constrains the diffuse direction
mainly in the colour gradient direction. Their works
are to some extent effective to preserve
discontinuousness and enlighten us a lot.
In order to preserve discontinuities better, this
paper adopts two strategies: ground control points
(GCPs) are applied as the soft constraint conditions
and the image gradient information is introduced to
control the penalty strength in the smoothness
function.
For the former, the ground control points (GCPs)
have two features. Firstly, they usually appear in the
areas where the colour changes suddenly, for
example, the boundaries of objects. Secondly, the
disparity value in GCPs can be gained by some
simple local matching algorithms such as SSD,
ZNCC, and have high reliability. So, proposed
method utilizes the prior information of GCPs to
modify the common cost part of the energy function.
For the latter, the smoothness function serves to
smoothness the disparity surface by penalizing the
variation between neighbour points. However, some
variation should be preserved or not be penalized if
the variation appears on the object boundaries. The
image gradient information is used to distinguish
boundaries or non-boundaries. Thus, we introduce
the image gradient information to control the penalty
strength. To satisfy different images, we design a
general mathematical model for the smoothness
function, which contains several adjustable
parameters for different images.
Finally, according to variational principles, the
Euler-Lagrange equations are deduced. Through
iteratively numerical solving Euler-Lagrange
equations, the disparity map solutions can be
calculated. For lessening the probability of local
minimum, the scale-space approach is utilized as
(Alvarez et al., 2000; Alvarez et al., 1999).
The paper is organized as follows: In Section 2,
we describe how to detect the GCPs. In Section 3,
the energy functional is introduced. The common
cost function will be modified based on the
information of GCPs. We analyze the conditions that
should be satisfied by the smoothness function and
propose a general mathematical model for the
smoothness function. In Section 4, the numerical
schemes of Euler-Lagrange equation and the scale-
space approach are represented. In Section 5, the
experimental results are presented to validate the
GCPs method. This paper ends with a brief
discussion and conclusion in section 6.
2 GCPS
GCPs can provide some more reliable information
for matching. For preserving the boundary
discontinuousness, we want to find out some GCPs
at the Image’s boundaries. This method may be a
little similar as the method in (Kim et al., 2002).
Firstly, all the images are processed by the LOG
filter to generate the new images. Secondly, the new
images are filtered by a defined filter with N
directions as figure 1, which are depicted in (1).
1 sin cos sin cos 1
(, )
0
xy ifxy
fxy
otherwise
θ
θθ θθ
−
−−<
=
⎧
⎨
⎩
(1)
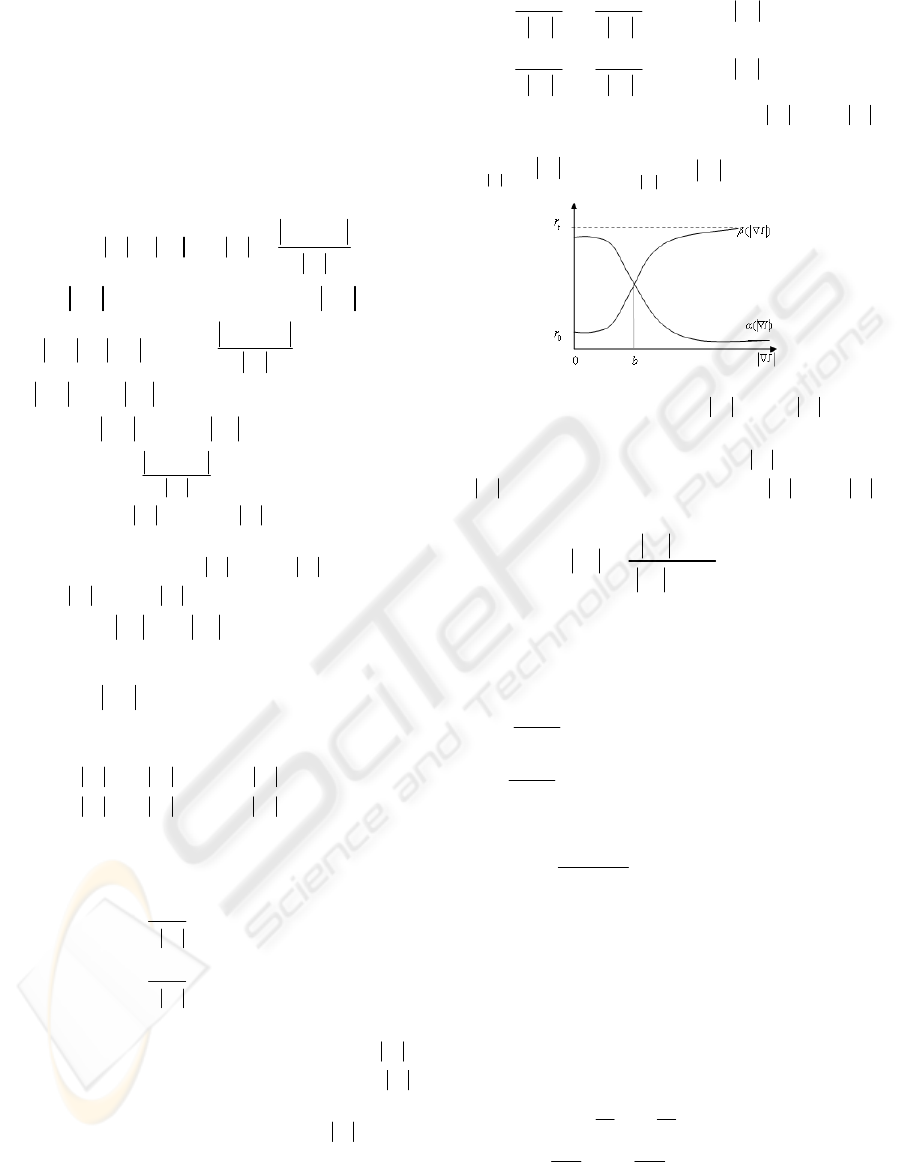
To avoid the problem that filters are across the
object boundaries, we perform local matching using
three filters for each orientation, where the centers of
the filters are shifted to the three different positions
as figure 2, and only the best filtering result (the
minimum) is preserved. Thus, each pixel contains N
results. All pixels are classified into two groups
(homogeneous group and heterogeneous group). If
the maximum of the pixel’s N results exceeds a
certain threshold, this pixel is labeled as
heterogeneous pixel; otherwise, it is labeled as
homogeneous pixel. All the GCPs will come from
the heterogeneous pixels. Thirdly, only those pixels
which satisfy the constraint of consistent bi-
directional matching can became GCPs. It is
operated as follows: in the disparity range, each
heterogeneous pixel in the left image is matched
with the pixel in the right image according to ZNCC
measurement. Then, if the best matching pixel in the
right image is a heterogeneous pixel and its best
matching pixel in the left image is consistent, this
pixel can be defined as the GCP and its disparity
value will be recorded.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
656
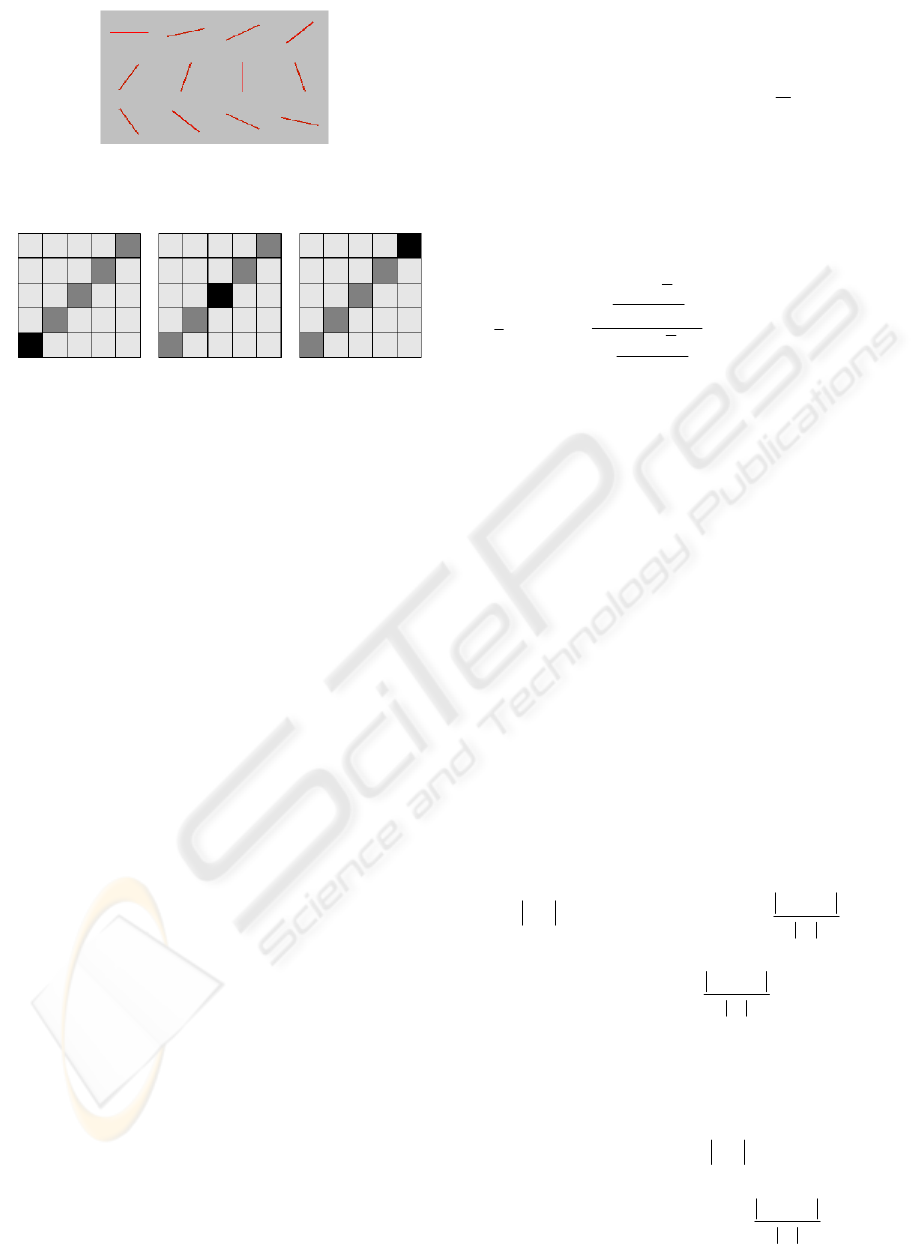
Figure 1: Examples of the rod-shaped oriented filters in
interval of 15
o
.
Figure 2: Diagram of the three shiftable oriented filters,
where the centers of the filters are marked in black.
3 THE ENERGY FUNCTIONAL
Generally, the energy function contains two parts in
(2)
() ((,),,) ( (,))ED CDxy xy S Dxy dxdy
λ
Ω
=+∇
∫∫
(2)
where the
()C •
is the cost function, the
()S
•
is
the smoothness function and
Ω is the image
domain.
3.1 The Cost Function
According to the assumption of Lambertian surfaces,
i.e. of objects that look equally bright from all
viewing directions, the two points accurately
matched have the similar intensity in general. Thus,
we define the cost function as follows:
()
2
12
(,,) (,) (, (,))CDij Iij I ij Dij=−−
(3)
where
n
I
is the intensity in image
n
=1,2. We
assume two images have been rectified so that the
disparity only appears on the
y
axis. Equation (3) is
the common frame of the cost part.
However, the expression of equation (3) is
inclined to lead to local minimum. Because it is high
possible that the grey value of one point in left image
1
I
is equal to the grey value of more than one points
in
2
I
. Several disparity values of a point may make
the cost part equal to zero. When a certain wrong
value of disparity in one point cause the cost part is
zero, the result may be a local minimum.
In order to reduce the possibility of the local
minimum, we utilize the prior knowledge of GCPs to
flexibly limit the cost function. If a point has been
established as GCPs, the real disparity at this point
should be close to the disparity value
,ij
D
calculated
during finding out GCPs. The longer the distance
between them is, the larger the cost value is. Thus,
we can design the cost function as (4). The frame
can ensure that only one minimum in GCPs. Thus, to
some extent, the frame can reduce the possibility of
local minimum.
2
,
2
,
2
11
(, )
(, )
((,),,)
(, )
1
((,) (, (,)))
ij
ij
Di j D
a
b
ij GCPs
CDijij
Di j D
b
I
ij Iij Dij otherwise
⎧
⎛⎞
−
⎪
⎜⎟
⎪
⎝⎠
∈
⎪
=
⎨
⎛⎞
−
+
⎪
⎜⎟
⎪
⎝⎠
⎪
−−
⎩
(4)
3.2 The Smoothness Function
The smoothness function is necessary so as to
smooth the disparity surface, since it can be used to
limit the excessive coarseness of the disparity
surface or the discontinuities of
(, )Dxy
. So, it
should be penalized if too large, and the larger the
variation value is, the more the penalty is. However,
the variation at different points should not be
penalized as the same rules. For example, the
variation appearing at the boundary is rational
because we expect it to be discontinuous there, while
the variation appearing at non-boundaries should be
penalized severely. Thus, we utilized the image
information to control the penalty strength and
emphasis.
(, )
D
xy
∇
represents the smoothness feature of
disparity surface. The penalty
about
(, )Dxy
∇
contains two terms: the penalty
about
D
∇
and the penalty about
D
I
I
⊥
∇•∇
∇
. The
former means the disparity surface is required to be
as smooth as possible.
D
I
I
⊥
∇•∇
∇
presents the
projection of the gradient disparity in the direction of
the image gradient. So the penalty about it means
that the gradient direction of disparity is supposed to
be consistent with the image gradient direction. If a
point locates in the non-boundary, we more
emphasize the penalty about
D
∇
in this point than
its disparity gradient direction. If a point locates in
the boundary, the penalty about
D
I
I
⊥
∇•∇
∇
is more
important. The penalty emphasis and strength in a
A PDES METHOD PRESERVING BOUNDARIES ON DENSE DISPARITY MAP RECONSTRUCTION
657
point (
x, y) depends on whether the point is at the
boundary or not. For convenience, we utilize the
image gradient information to sign whether the point
is at the boundary (actually, there is other image
information which can be used to sign the boundary,
and we will discuss them in our future work).
Usually, the boundary is linked with image gradient
module.
Summarily, the smoothness function is described
as this model:
12
(,) ()( ) ()( )
DI
SDI IS D IS
I
αβ
⊥
∇•∇
∇∇= ∇ ∇ + ∇
∇
(5)
where
1
()SD∇
presents the function of
D
∇
, such
as
2
1
()SD D∇=∇
;
2
()
D
I
S
I
⊥
∇•∇
∇
is similar
to
1
()SD∇
;
()I
α
∇
presents the weight of the
penalty of
1
()SD∇
and
()I
β
∇
presents the weight
of the penalty of
2
()
DI
S
I
⊥
∇•∇
∇
.
Estimating
()
I
α
∇
and
()
I
β
∇
is the key of
estimating the smoothness function. We depict the
constraint conditions of
()
I
α
∇
and
()
I
β
∇
as below.
Firstly,
()
I
α
∇
and
()
I
β
∇
must be regularized:
()()1II
αβ
∇+ ∇=
(6)
0>a
0>
β
(7)
The larger
D
∇
at a point is, the more probably it
is at the boundary. The opposite is similar. Thus, we
can get:
() ()
() ()
aI I if Ib
aI I if Ib
β
β
∇> ∇ ∇<
∇< ∇ ∇>
⎧
⎨
⎩
(8)
where
b is considered as the threshold to estimate
whether the point (
x, y) is at the boundary or not.
Naturally, we can assume
0
0
I
I
α
β
∂
<
∂∇
∂
>
∂∇
⎧
⎪
⎪
⎨
⎪
⎪
⎩
(9)
In addition, for decreasing the ambiguousness
near the threshold, we require that the weight
()
I
α
∇
rapidly descends at a gradually fast speed while
I
∇
approaches the threshold from left, and the
descending speed begins to lower while
I
∇
leaves
the threshold from right. Thus, we add additional
conditions about
α
and
β
:
22
22
22
22
0, 0
0, 0
if I b
II
if I b
II
αβ
αβ
⎧
∂∂
<
>∇<
⎪
∂∇ ∂∇
⎪
⎨
∂∂
⎪
>< ∇>
⎪
∂∇ ∂∇
⎩
(10
)
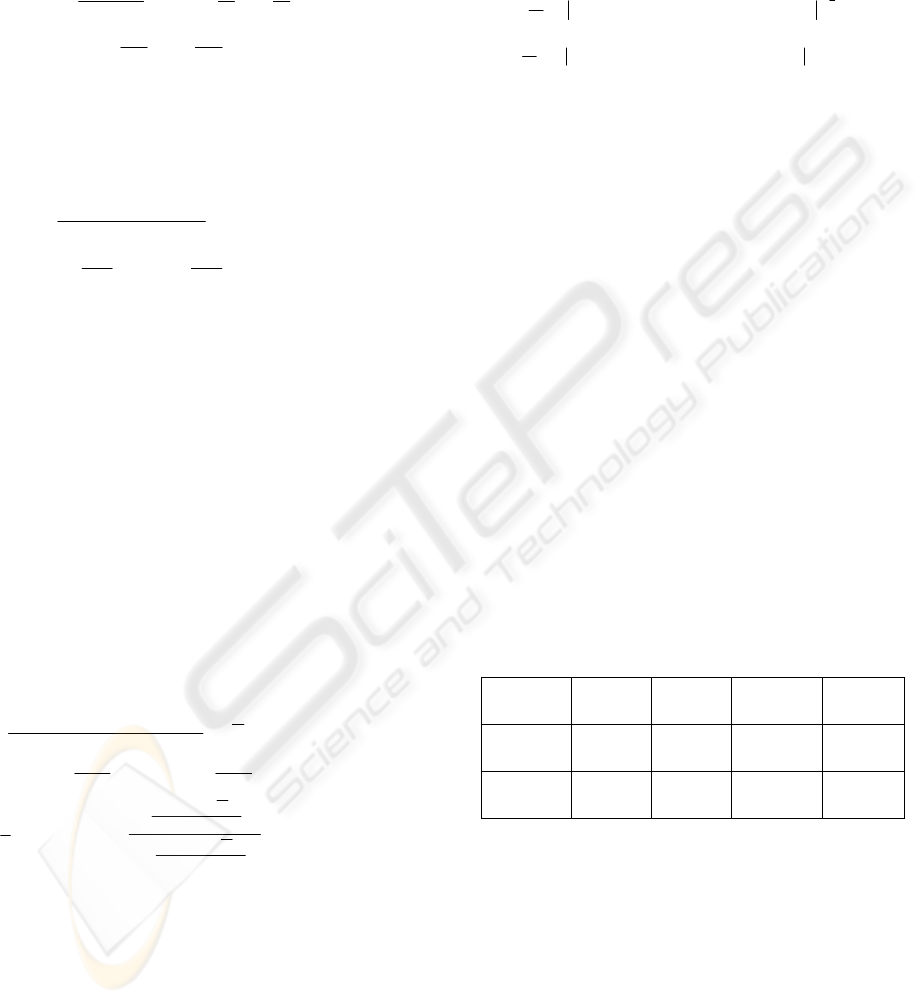
Based on all conditions above,
()
I
α
∇
and
()
I
β
∇
can be approximately figured as figure 3, where
0
0
lim ( )
I
rI
β
∇→
=
∇
and
lim ( )
t
I
rI
β
∇→∞
=
∇
Figure 3: Sketchy map of
()
I
α
∇
and
()
I
β
∇
.
Then, we define the model of
()
I
β
∇
as (11) and
()
I
α
∇
can be calculated through
()1()
I
I
αβ
∇=− ∇
according to (6).
()
m
m
eI f
I
Ig
β
∇
+
∇=
∇
+
(11)
where
e, f, g, and m are constants. According to
conditions (6)-(9), these results are in (12).
0
0
0
21
12
21
12
t
m
t
m
t
er
r
g
b
r
r
f
br
r
⎧
⎪
=
⎪
⎪
−
⎪
=
⎨
−
⎪
⎪
−
=
⎪
−
⎪
⎩
and
0
0,0 1
t
mrr><<<
(12)
where
m is decided by the additional conditions (10).
0
0
1
t
t
rr
m
rr
−
=
+
−
and
0
1
t
rr+>
(13)
4 SOLVING EULER-LAGRANGE
EQUATIONS
According to the variational principles, D(x, y) as the
minimum of (1) must fulfill the Euler-Lagrange
equations and boundary conditions:
()0
cos sin 0
xy
DDD
xy
CSS
xy
SS
DD
λ
νν
∂∂
⎧
−
+=
⎪
∂∂
⎪
⎨
∂∂
⎪
+=
⎪
∂∂
⎩
(14)
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
658
where
cos
sin
ν
ν
⎡⎤
⎢⎥
⎣⎦
represents a vector normal to the
boundary of
Ω . Equation (14) is solved by the
gradient-descent method or, equivalently, by using a
dynamic scheme as (15)
(, , )
()
cos sin 0
xy
DDD
xy
Dtxy
CSS
txy
SS
DD
λ
νν
∂∂∂
⎧
=− + +
⎪
∂∂∂
⎪
⎨
∂∂
⎪
+=
⎪
∂∂
⎩
(15)
where
t is an artificial time.
We discretize the equation by finite differences.
All spatial derivatives are approximated by central
differences, and for the discretization in
t we use
explicit scheme as (16).
( ,,) (,,)
((,,),,)
( ( (,, )) ( (,, )))
y
x
D
D
D
Dt ti j Dti j
CDtijij
t
S
S
Dti j Dti j
xy
λ
+Δ −
=−
Δ
∂
∂
++
∂∂
(16)
To avoid the local minimum, a linear scale-space
approach is applied. Typically, we may expect that
the algorithm converges to a local minimum of the
energy functional that is located in the vicinity of the
initial data. To avoid convergence to irrelevant local
minimum, we embed proposed method into a linear
scale-space framework (Robert and Deriche, 2000).
We let
11
:*
I
GI
σ
σ
= and
22
:*
I
GI
σ
σ
= , where * is the
convolution operator, and
G
σ
detects a Gaussian
with standard deviation
σ
. We start with a large
initial scale
0
σ
. Then we compute the disparity
0
D
σ
at
scale
0
σ
as the asymptotic state of solution using
some initial approximation. Next, we choose a
number of scales:
1
,(0,1)
nn
σηση
−
=∈
, and we get the
i
D
σ
at each
i
σ
with the initial of
1i
D
σ
−
. Overall, we
can modify the iterating formation as:
(,,) (,,)
((,,),,)
ii
i
i
D
D t ti j D ti j
CDtijxy
t
σσ
σ
σ
+Δ −
=−
Δ
( ( (,,)) ( (,,)))
y
x
ii
D
D
S
S
D tij D tij
xy
σσ
λ
∂
∂
++
∂∂
2
,
2
,
2
12
(, )
(, )
((,),,)
(, )
1
( (, ) (, (, )))
i
i
i
iii
ij
ij
Dij D
k
g
ij GCPs
C Dij ij
Dij D
g
I
ij I ij D ij otherwise
σ
σ
σ
σσσ
⎧
⎛⎞
−
⎪
⎜⎟
⎪
⎝⎠
∈
⎪
=
⎨
⎛⎞
−
+
⎪
⎜⎟
⎝⎠
⎪
⎪
−−
⎩
1
(0, , ) ( , , )
ii
D
ij D ij
σσ
+
=∞
(17)
5 RESULTS
In this section, we compare proposed method
without considering occlusion with graph cuts
method. All the experiment images come from the
website http://vision.middlebury.edu/stereo. The
images “cloth1” and “cloth3” are contained in the
2006 datasets, the image “Teddy” is in the 2003
database and the image “Tsukuba” is in the 2001
database. In order to evaluate proposed method, the
recognized evaluations (
Scharstein and Szeliski, 2001)
are defined as (18) and (19).
1
2
2
(,)
1
((,)(,))
xy
R disparityMap x y groundTruth x y
N
=−
∑
(18)
(,)
1
((,) (,))
xy
B disparityMap x y groundTruth x y
N
=
−>Δ
∑
(19)
where
N is the total number of pixels,
Δ
is a
disparity error tolerance. For the experiments in the
paper we use
1
Δ
= . R denotes the average error
value and
B denotes the ratio of the “bad pixels” in
the disparity map. The consequences are showed in
table 1 and figure 4. In the results of proposed
method, the boundaries of objects can be
distinguished clearly. It indicates that the proposed
method owns to the ability of preserving
discontinuousness.
Table 1 presents that the average error value
R in
proposed method is lower than graph cuts method. It
is mainly because that PDEs method has the
characteristic of keeping continuousness. We list the
detail comparison in figure 5. In some continuous
areas, the proposed method can keep the disparity
map continuous better than graph cuts method. The
proportion of “bad pixels” in our method has no
advantage comparing with graph cuts methods,
especially in the image “Tsukuba” with much
discontinuousness. The comparison in “Tsukuba” of
table 1 can reflect this point.
Table 1: Error comparison. The code of GC method comes
from the same website above.
Cloth1
R/B
Cloth3
R/B
Tsukuba
R/B
Teddy
R/B
GC
method
1.015
0.0104
1.766
0.0414
1.247
0.0424
4.9603
0.1317
Proposed
method
0.604
0.0092
0.889
0.0247
0.809
0.0858
1.7703
0.1681
6 CONCLUSIONS
The assumption of continuousness renders PDEs
method difficult to perfectly reconstruct disparity
map. This paper adopts two strategies to preserve
necessary discontinuousness for the disparity map.
The results show that proposed method performs
better than graph cuts method in “Cloth1” and
“Cloth3”, mainly because there images with less
discontinuousness meet the feature of PDEs. The
proposed method can deal with images with much
A PDES METHOD PRESERVING BOUNDARIES ON DENSE DISPARITY MAP RECONSTRUCTION
659

discontinuousness such as “Tsukuba” and “Teddy”
and gain approximate results of graph cuts method.
There are some other aspects which can be
improved. For example, occlusion problem should
be considered, and this problem has exposed in
“Tsukuba” and “Teddy”.
Although it is more difficult for the PDEs
method to preserves boundaries than some discrete
energy methods such as graph cuts method, PDEs
methods have its advantage on keep continuousness.
If we can find some witty strategies to preserve
necessary discontinuousness, PDEs method still can
become a useful solution in disparity map
reconstruction.
REFERENCES
Alvarez, L., Deriche, R., Sanchez, J., Weickert, J., 2000.
Dense disparity map estimation respecting image
discontinuities: a PDE and scale-space based approach.
In Technical Report RR-3874, INRIA.
Alvarez, L., Weickert, J., Sanchez, J., 1999. A scale-space
approach to nonlocal optical flow calculations. In
Scale-Space Theories in Computer Vision, pages 235-
246.
Aubert, G., Barlaud, M., Faugeras, O. and Jehan-Besson,
S., 2002. Image segmentation using active contours:
Calculus of variations or shape gradients? In Research
Report, INRIA.
Aubert, G., Vese, L., 1997. A variational method in image
recovery. In SIAM Journal of Numerical Analysis,
volume 34, pages 1948–1979.
Birchfield, S., Tomasi, C., 1999. Multiway cut for stereo
and motion with slanted surfaces, Proceeding of
International Conference Computer Vision, pages 489-
495.
Boykov, Y., Veksler, O., Zabih R., 2001. Fast approximate
Energy Minimization via Graph Cuts. In Proceeding
IEEE Transaction Pattern Analysis and Machine
Intelligence, volume 23
, pages 1222-1239.
Chan, T. F., Vese, L.A., 2001. Active contours without
edges. In IEEE Transaction on Image Processing,
volume 10, pages 366-277.
Deriche, R., Bouvin, S., Faugeras, O., 1997. A level-set
approach for stereo. In Proceeding SPIE, Investigative
Image Processing, volume 2092, pages 150-161.
Faugeras, O., Keriven, R., 1998. Complete Dense Stereo
vision Using Level Set Methods. In Proceeding
European Conference on Computer Vision, pages 379-
394.
Faugeras, O., Keriven, R., 2002. Variational Principles,
Surface Evolution, PDE's, Level Set Methods and the
Stereo Problem. In IEEE Transaction on Image
Processing, volume
7, pages 336-344.
Felzenszwalb, P. F., Huttenlokcher, D. P., 2004. Efficient
Belief Propagation for Early Vision. In Proceeding
International Journal of Computer Vision, volume 1,
pages 261-268.
Frey B. J., Koetter R., Petrovic N., 2002. Very loopy belief
propagation for unwrapping phase images. In MIT
Press, volume 14.
Kass, M., Witkin, A., Terzopoulos D., 1988. Snakes:
active contour models. In International Journal of
Computer Visiosn, volume 1, pages 321–331.
Kim, J.C., Lee, K.M., Choi, B.T., Lee, S.U., 2005. A dense
stereo matching using two-pass dynamic programming
with generalized ground control points. Proceeding
Computer Vision and Pattern Recognition, pages
1075-1082
Kim, J., Kolmogorov, V., Zabih, R., 2003. Visual
correspondence using energy minimization and mutual
information. In Proceeding International Conference
Computer Vision, pages 1033-1040.
Klaus, A., Sormann, M., Karner, K, 2006. Segment-based
stereo matching using belief propagation and a self-
adapting dissimilarity measure, In International
Conference of Pattern and Recognition, volume 3,
pages 15-18.
Kolmogorov, V., Zabih, R., 2004. What energy functions
can be minimized via graph cuts? In IEEE Trans.
Pattern Analysis and Machine Intelligence, volume 28,
pages 147-159.
Marshall, F. T., William, T. F., 2003. Comparison of
Graph Cuts with Belief Propagation for Stereo, using
Identical MRF Parameters. In Proceedings of the Ninth
IEEE International Conference on Computer Vision,
volume 2, pages 900-906.
Maso, G. D., Morel, J. M., Solimini, S., 1992. A
variational method in image segmentation: existence
and approximation results, In Acta Matematica,
volume 168, pages 89–151.
Osher, S., Sethian, J.A., 1988. Fronts propagating with
curvature dependent. In Journal of Computational
Physics, volume 79, pages 12-49.
Robert, L., Deriche, R., 1996. Dense disparity map
reconstruction: A minimization and regularization
approach which preserves discontinuities. In
Proceeding European Conference on Computer Vision,
pages 439-451.
Roy, S., Cox, I., 1998. A maximum-flow formulation of
the n-camera stereo correspondence problem. In
Proceeding international Conference of Computer
Vision, pages 492-498.
Scharstein, D., Szeliski, R., 2002. A taxonomy and
evaluation of dense two-frame stereo orrespond- dence
algorithms, In International Journal of Computer
Vision, volume 47, pages 7-42.
Sun, J., Zheng, N.N., Shum, H.Y., 2003. Stereo Matching
Using Belief Propagation. In IEEE Trans. Pattern
Analysis and Machine Intelligence, volume 25, pages
787-800.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
660

(a)
(b)
(c)
(d)
Figure 4: The disparity map reconstructed by proposed
method and graph cuts. Four group images (a) (b) (c) (d)
respectively are related to Cloth1, Cloth3, Tsukuba and
Teddy. In each group, the left-up, right-up, left-down and
right-down images are respectively left image, ground
truth, the result of GC and the result of proposed method.
(a)
(b)
(c)
Figure 5: The detail comparison of disparity maps. Three
group images (a) (b) (c) respectively are related to Cloth3,
Cloth1 and Teddy. In each group, the left-up, right-up,
left-down and right-down images are respectively ground
truth, local ground truth, local result of GC and local result
of proposed method.
A PDES METHOD PRESERVING BOUNDARIES ON DENSE DISPARITY MAP RECONSTRUCTION
661
