
ROBUST MULTI-TARGET TRACKING USING MEAN SHIFT
AND PARTICLE FILTER WITH TARGET MODEL UPDATE
Hong Liu, Jintao Li, Yueliang Qian and Qun Liu
Key Laboratory of Intelligent Information Processing, Institute of Computing Technology
Chinese Academy of Sciences, Beijing 100080, China
Keywords: Multiple Targets Tracking, Mean Shift, Particle Filter, Model Update.
Abstract: We propose a novel multiple targets tracking algorithm combining Mean Shift and Particle Filter, and
enhance the performance with target model update process. Mean Shift has a low complexity, but is weak in
dealing with multi-modal probability density functions (pdfs). Particle Filter is robust to the partial
occlusion and can deal with multi-modal pdfs. In real application, illumination conditions, the visual angle
as well as object occlusion can change target appearance, thus influence the quality of Particle Filter. For
multi-target tracking task, the mutual occlusion of targets and computational complexity are important
problems for tracking system. In this paper, Mean Shift algorithm is embedded into Particle Filter
framework to get stable tracking and reduce computational load. To overcome the target appearance
changes caused by illumination changes and object occlusion, targets model are updated adaptively during
tracking. Experimental results show that our tracking system can robustly track multiple targets with mutual
occlusion and correctly maintain their identities with smaller number of particles than Particle Filter.
1 INTRODUCTION
Tracking multiple targets has been of broad interest
in many computer vision applications for decades. A
visual based multi-target tracking system should be
able to track multiple objects in a dynamic scene and
maintain the correct identities of the targets
regardless of occlusions and any other visual
perturbations (Cai, Nando, 2006). We address the
problem of robust and fast multi-target tracking.
Tracking algorithms can be classified into two
major groups. The first group is Target
Representation and Localization algorithm, the
second group is Filtering and Data Association
algorithm (Comaniciu, Ramesh, 2003). The Mean
Shift (MS) algorithm (Comaniciu, Ramesh, 2003) is
a non-parametric method which belongs to the first
group. MS is an iterative kernel-based deterministic
procedure which converges to a local maximum of
the measurement function under certain assumptions
on the kernel behaviors. On the one hand, MS is the
algorithm with low complexity, which provides a
general and reliable solution independently from the
features representing the target. On the other hand,
MS fails in tracking small and fast moving targets
(Comaniciu, Ramesh, 2003). Particle Filter (PF) is a
parametric method which belongs to the second
group. PF solves non-linear and non-Gaussian state
estimation problems (Arulampalam, Maskell, 2002)
and can deal with multi-modal pdfs. The number of
particles needed to model the variations of the
underlying pdf increases exponentially with the
dimensionality of the state space, thus increasing the
computational load (Maggio, Cavallaro, 2005).
For multi-target tracking task, with the increasing
of targets number, the particles also increased
dramatically to maintain correct tracking, which will
also bring computational complexity problem (Cai,
Nando, 2006). In real applications, illumination
conditions, the visual angle as well as the mutual
occlusion of targets will change the appearance of
targets, thus influence the performance of Particle
Filter (Nummiaro, Koller, 2002). A hybrid PF and
MS tracking algorithm TSHT was used to reduce
particle number compared with Particle Filter
(Maggio, Cavallaro, 2005). But in their experiment,
TSHT was applied for tracking single target with no
occlusion and appearance change. In literature (Cai,
Nando, 2006), Mean Shift was also embedded into
Particle Filter framework to stabilize the trajectories
of targets for multi-target tracking. But they
assigned much more particles in the first stage and
haven’t analyzed the influence of computational
complexity after embedding Mean Shift into Particle
Filter. The above methods have not taken the
605
Liu H., Li J., Qian Y. and Liu Q. (2008).
ROBUST MULTI-TARGET TRACKING USING MEAN SHIFT AND PARTICLE FILTER WITH TARGET MODEL UPDATE.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 605-610
DOI: 10.5220/0001080506050610
Copyright
c
SciTePress

updating of the target model into consideration,
which is actually important in real applications.
Literature (Shan, Wei, 2004) used target model
update process, but is applied for tracking single
target.
This paper proposes a novel method for multiple
targets tracking. Particle Filter framework is adopted
which uses Monte Carlo sampling method to resolve
non-Gaussian and non-linear state estimation
problem of video tracking. In initial stage, an
independent particle filter tracker is assigned for
each target. Target model uses the weighted color
histogram, which is robust to illumination changes
and partly occlusion. Targets model are updated
adaptively during tracking to fit the changes of
target appearance. To reduce computing complexity
of multi-target tracking, we embedded Mean Shift
into particle filter framework after importance
sampling process. After Mean Shift aggregates,
particles are closer to the local maximum
corresponding to the true position of targets. Thus,
in initialization stage, only a fewer number of
particles can maintain the correct tracking. We name
our method as MSPFU (Mean Shift embedded
Particle Filter with target model Update).
The paper is organized as follows. Section 2
introduces the target model, existing tracking
algorithms. The proposed tracking system MSPFU is
discussed in Section 3. Experimental results are
presented in Section 4. Finally, in Section 5 we draw
the conclusions.
2 CONVENTIONAL METHOD
2.1 Target Model
We adopt the weighted color histogram as target
model (Comaniciu, Ramesh, 2003) in our
application. The color histogram is a widely used
form of target representation for it is successful in
tracking non-rigid objects with partial occlusion and
rotation. The model is originally introduced by
Comaniciu et al. (Comaniciu, Ramesh, 2003) for the
mean-shift based object tracking.
We define the target as its normalized color
histogram,
1,...,
{}
uu m
qq
=
=
, where m is the number of
bins. The normalized color distribution of a initial
target model
()qy
centered in
y
can be calculated as
[]
2
1
() ( )
h
n
i
uh i
i
yx
qy C k bx u
h
δ
=
⎛⎞
−
=−
⎜⎟
⎜⎟
⎝⎠
∑
(1)
where
h
1,...,
{}
ii n
x
=
are the
h
n
pixel locations of the
target candidate in the target area,
()
i
bx
associates
the pixel
i
x
to the histogram bin,
()kx
is the kernel
profile with bandwidth
h
. The bandwidth
h
determines the scale of the target candidate. And
()kx
is a kernel profile of kernel K that can be
written in terms of a profile function
:[0, )kR∞→
such that
2
() ( )
K
xkx=
. According to (Comaniciu,
Ramesh, 2003), the kernel profile
()kx
should be
nonnegative, nonincreasing, piecewise continuous,
and
0
()krdr
∞
<
∞
∫
.
The term
h
C
in Eq.(1) is a normalization function
defined as
2
1
1
h
h
n
i
i
C
yx
k
h
=
=
⎛⎞
−
⎜⎟
⎜⎟
⎝⎠
∑
(2)
The same equations are used to obtain the target
candidate centered by
y
′
is
()
u
p
y
′
. In order to
calculate the likelihood of a candidate a similarity
function is needed which defines a distance between
the model and the candidate. We use the
Bhattacharryya coefficient (Comaniciu, Ramesh,
2003) to calculate similarity, defined between two
normalized histograms
()
p
y
′
and
()qy
as Eq.(3).
The corresponding distance is defined as Eq.(4).
1
(( ),()) ( ) ()
m
uu
u
p
yqy pyqy
ρ
=
′′
=
∑
(3)
( ( ), ( )) 1 ( ( ), ( ))dpy qy py qy
ρ
′′
=−
(4)
2.2 Particle Filter
The Particle Filter is a Bayesian sequential
importance sampling technique, which recursively
approximates the posterior distribution using a finite
set of weighted samples (Arulampalan, Maskell,
2002). It consists of essentially two steps: prediction
and update. Given all available observations
1: 1k
z
−
up to time k-1, the prediction stage uses the
probabilistic system state transition model (Maggio,
Cavallaro, 2005)
1
(| )
kk
px x
−
(5)
to predict the posterior at time k as
1: 1 1 1 1: 1 1
(| ) (| )( | )
kk kk k k k
px z px x px z dx
−
−−−−
=
∫
(6)
At time k, the observation
k
z is available, and
the state can be updated using Bayes’ rule
1: 1
1:
1: 1
(|)(| )
(| )
(|)(| )
kk k k
kk
kk k k k
pz x px z
px z
p
zxpxz dx
−
−
=
∫
(7)
where
(|)
kk
p
zx
is described by the observation
equation. In the particle filter, the posterior
1:
(| )
kk
p
xz
is approximated by a finite set of
s
N
samples
1,...,
{}
s
i
ki N
x
=
with importance weights
i
k
ω
.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
606

1:
1
(| ) (-)
s
N
ii
kk kkk
i
px z x x
ωδ
=
≈
∑
(8)
The candidate samples
i
k
x
are drawn from an
importance distribution (proposal distribution)
11:
(| , )
kk k
qx x z
−
and the weight of the samples are
-1
-1
1
-1 1:
(|)(| )
,1
(| , ))
s
N
iii
ii i
kk kk
kk k
ii
i
kk k
pz x px x
qx x z
ωω ω
=
∝=
∑
(9)
In the case of the bootstrap filter (Arulampalan,
Maskell, 2002),
11: 1
(| , ) (| )
kk k kk
qx x z px x
−
−
=
and the
weights become the observation likelihood
(|)
kk
pz x
according to Eq.(9). The observation
probability of each particle sample in every Particle
Filter
2
2
1((),)
exp{ }
2
2
i
k
dpyq
ω
σ
πσ
=−
(10)
is specified by a Gaussian with variance
σ
.
During filtering, samples with a high weight may be
chosen several times, leading to identical copies,
while others with relatively low weights may not be
chosen at all.
The best state at the time k is derived based on
the discrete approximation of Eq.(8). The most
common solution is the Monte Carlo approximation
of the expectation
s
1
()
N
ii
kkk
i
Ex x
ω
=
=
∑
(11)
Resampling of the particles is necessary from
time to time in each iteration to avoid degeneracy of
the importance weights. With the prediction process,
PF can track fast small targets. The major limit of PF
is the limited capability of the particles to describe
the pdf when the state space is not densely sampled
(Cai, Nando, 2006). To overcome this problem, a
large number of particles is required thus increasing
the computational load (Maggio, Cavallaro, 2005).
For multiple targets tracking task, the computational
complexity will increased more dramatically than
for single target tracking task.
2.3 Mean Shift
Mean Shift is a nonparametric statistical method that
seeks the mode of a density distribution in an
iterative procedure (Comaniciu, Ramesh, 2003). The
MS algorithm is an iterative process that aims at
minimizing the distance in Eq.(4). The process is
initialized with the location of the target in the
previous frame,
0
y
. The shape of the kernel is
chosen so that the distance becomes a smooth
function (Comaniciu, Ramesh, 2003). Then, based
on gradient information, the MS algorithm
converges to the nearest local minimum. Looking at
Eq.(3) and Eq.(4), it is possible to notice that
minimizing Eq.(4) corresponds to maximizing
Eq.(3). Using the Eq.(1) by computing the Taylor
expansion of the Bhattacharryya coefficient around
the starting position
0
y
, we obtain the following
expression
2
0
11
1
((),) ( )
22
h
n
m
hi
uu i
ui
Cyx
py q p y q wk
h
ρ
==
⎛⎞
−
≈+
⎜⎟
⎜⎟
⎝⎠
∑∑
(12)
In the right part of Eq.(12), the first term does
not depend on
y
. Therefore we need to maximize
only the second term of Eq.(12). At each step of the
iterative process, the estimated target moves from
0
y
to the new location
1
y
, defined as
22
00
1
11
hh
nn
ii
ii i
ii
yx yx
yxwg wg
hh
==
⎛⎞⎛⎞
−−
=
⎜⎟⎜⎟
⎜⎟⎜⎟
⎝⎠⎝⎠
∑∑
(13)
If
() ()
g
xkx
′
=
−
, then
,10
()
hG
myyy=−
is in the
gradient direction. The iterative process stops when
10
yy
ε
−
<
. In Eq.(13) it is possible to notice that the
maximum area where the target can be correctly
localized is the kernel size. For this reason, if the
center of the object shifts more than this size in two
consecutive frames, the MS vector is no more
correlated with the object itself and therefore the
track is likely to be lost (Maggio, Cavallaro, 2005).
3 PROPOSED METHOD
3.1 The Tracker Framework of
MSPFU
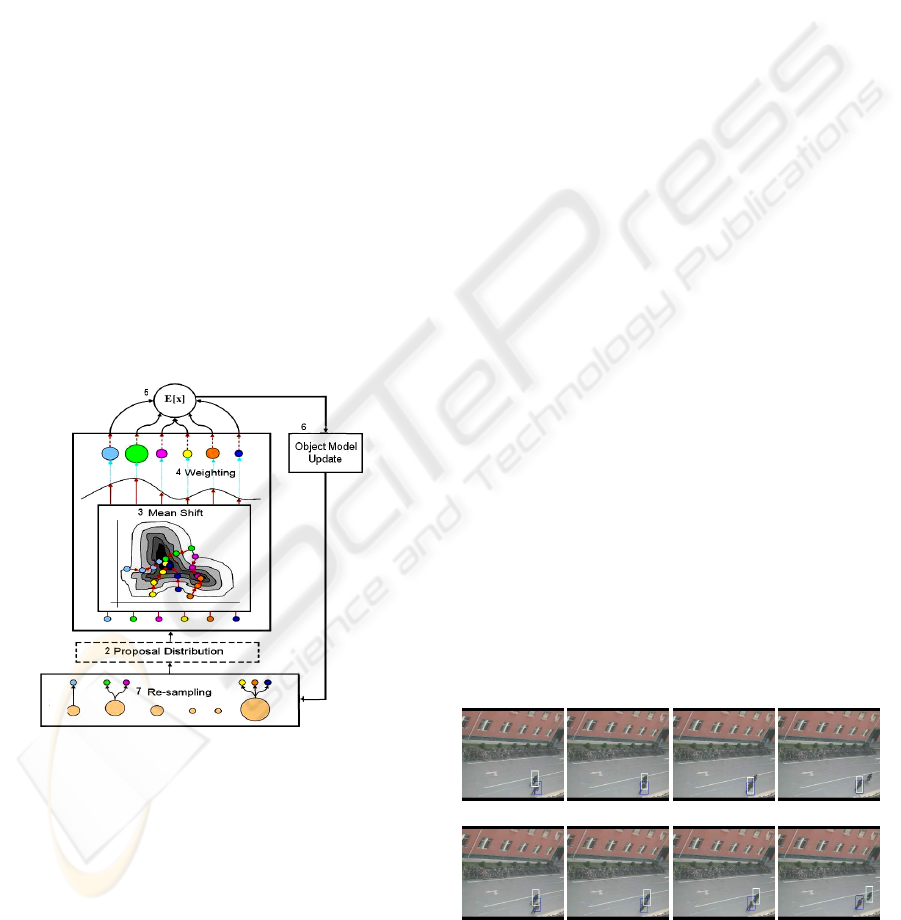
We can divide the proposed tracker into seven main
steps as Figure.1 shows. The first step which is the
initialization stage assigns one particle filter tracker
for each target. These particle filters will track
corresponding target independently in the latter
video. The second step propagates each particle
using proposal distribution according to Eq.(5). The
third step applies MS independently to each particle
for every particle filter tracker until all particles have
reached a stable position. The fourth step calculates
the weight of each particle filter using the
Bhattacharryya coefficients as Eq.(10). The fifth
step calculates the weighted average to obtain the
best state as Eq.(11) for each target. The sixth step
updates each target model according to Eq.(15).
Finally, the seventh step re-samples the particles
according to the weights of particle. Again, go to the
second step to propagate particles into next time or
next frame and begin a recursive process for
tracking. Different from TSHT (Maggio, Cavallaro,
ROBUST MULTI-TARGET TRACKING USING MEAN SHIFT AND PARTICLE FILTER WITH TARGET MODEL
UPDATE
607
2005), we add target model update process after
getting the target state. Another difference is we
resample particles before propagation process.
3.2 Dynamic Model
The proposed particle filter tracker consists of an
initialization of the target model and a sequential
Monte Carlo implementation of a Bayesian filtering
for the stochastic tracking system. In each iteration,
the particle filter tracking algorithm consists of two
steps: prediction and update. The state of the particle
filter is defined as
x{,}
x
y=
, where
,
x
y
indicate
the location of the target. In the prediction stage, the
samples in the state space are propagated through a
dynamic model. We use the following second order
autoregressive model (Cai, Nando, 2006):
-1 - 2
(0,1)
kk k
xAx Bx CN=++
(14)
where
{, , }
A
BC
are the coefficients, and
(0,1)N
is
a Gaussian noise with zero mean and standard
deviation of one. This dynamic model uses the
historical data to predict the current state value. The
current state
k
x
only depends on the previous states
with a deterministic mapping function and a
stochastic disturbance.
Figure 1: Schematic representation of our method.
3.3 Target Model Update
Illumination conditions and the visual angles can
change the target appearance. For multi-target
tracking task, mutual occlusion of objects is a
frequent problem, which will change target
appearance largely. In occlusion situation, the
original target model can not describe the target
appearance correctly. Still using the original target
model in later tracking will seriously influence the
quality of the color-based particle filter. This tracker
may drift to other nearby target with the similar
color or similar appearance. Updating target model
is important and necessary for multi-target tracking.
To describe the target appearance more effectively,
we adaptively update the target model during
tracking process. The update of the target model
belonging to object m is implemented by the
following equation (Nummiaro, Koller, 2002)
-1 ,
(1 )
mmm
khkhkE
qqq
αα
=− +
(15)
for each bin, where
h
α
weighs the contribution of
the mean state histogram
,
m
kE
q
of particles belonging
to target m to the history target model
-1
m
k
q
.
4 EXPERIMENTAL RESULTS
The proposed particle filter based tracker MSPFU
has been implemented in Visual C++ and tested on a
3.2GHz Pentium4 PC with 512MB memory. It has
been applied to a variety of tracking scenarios for
multi-target tracking.
4.1 Robust to Partial Occlusion
The first experiment will analyse the tracking
performance when multiple targets partial occlude
each other. The video comes from a campus scene.
The image size of the sequence is
320 240×
with 25
frames per second. In this sequence, two persons
move independently first, occlude each other and
then depart. They have similar color and shape. We
compared our method MSPFU with Mean Shift
method (Comaniciu, Ramesh, 2003) using the same
target model and initialization. Here we also add
target model update to Mean Shift algorithm. In our
tracking system MSPFU, we set the parameters A,
B, C in Eq.(14) as 2, -1 and 16, and set
h
α
as 0.1.
These values are fixed in our following experiments.
Figure.2 shows the results of key frame in this video.
(a) Results from Mean Shift method.
(b) Results from Our method MSPFU.
Figure 2: Comparison of tracking performance between
MS and our method on an outdoor campus video.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
608

Figure.2.(a) demonstrates the results of Mean Shift
tracking, which shows one tracker drift to another
when the two persons occlude each other.
Figure.2.(b) gives the results of our method, which
can maintain tracking and correct identities although
the two persons are similar in color and shape.
4.2 Target Model Update in Serious
Occlusion Situation
This experiment aims to analyse the multi-target
traking performance for serious occlusion. The
computational complexity and tracking accuracy of
our method and some existed methods are
compared. Here, we used a public test sequence
named “ThreePastShop2cor.mpg” and the relative
ground truth file obtained from website (Http://,
2004). The image sizes are
384 288×
pixels, 25
frames per second. Three persons move in this
video. We initialize three persons on frame No.400
with colored rectangle boxes according to the
ground truth file. The left person is labeled A with
blue box, the middle person is labeled B with green
box and the right person labeled C with red box. In
this video, sometimes A and B, A and C are
seriously occluded, and A and C have same color,
which is difficult to maintain correct tracking.
First, we compare TSHT method (Maggio,
Cavallaro, 2005) with our method. TSHT embeds
Mean Shift into particle filter without target model
update process. We assign 1000 particle samples for
each target for TSHT. To compare the tracking
performance on the same baseline, we use same
initial target model and dynamic model. Figure3.(a)
gives the results of TSHT method with 1000
particles for each target, which shows several errors
especially when the two targets are seriously
occluded. From the results, we can see that the
appearance of target is changed largely when it is
occluded by other objects. But TSHT method still
uses the initial target model to track, which makes
tracker A drift to C in the second resulted image and
C drift to B in the fourth resulted image. In this
situation, assigning more particles for each target
cannot maintain correct tracking. Figure 3.(b) shows
the results of our method MSPFU, which can
maintain correct tracking although the two persons
are seriously occluded and the two persons have
similar color and shape. Our method uses only 40
particles for each target in initialization stage.
Second, as for the computational complexity, we
compare our method MSPFU with the PF. We add
target model update process for PF method. In our
experiment, PF method use at least 100 particles for
each target to maintain correct tracking and the
average processing time for each frame is 722 ms.
Our tracking system MSPFU uses only 40 particles
for each target in initialization stage and the average
processing time for each frame is 436 ms, which can
track multi-target quickly.
In above experiments, we compare the
computational complexity in tracking multiple
targets in terms of the number of particles. To
compare the tracking accuracy, we consider the
accuracy of target center position. The distance
between the real tracked center position of target and
the ground truth is calculated to measure the
tracking accuracy for PF and MSPFU.
(a) Results from TSHT.
(b) Results from Our method MSPFU.
Figure 3: Comparison of tracking performance between
TSHT and our method PFMSU on a public open video.
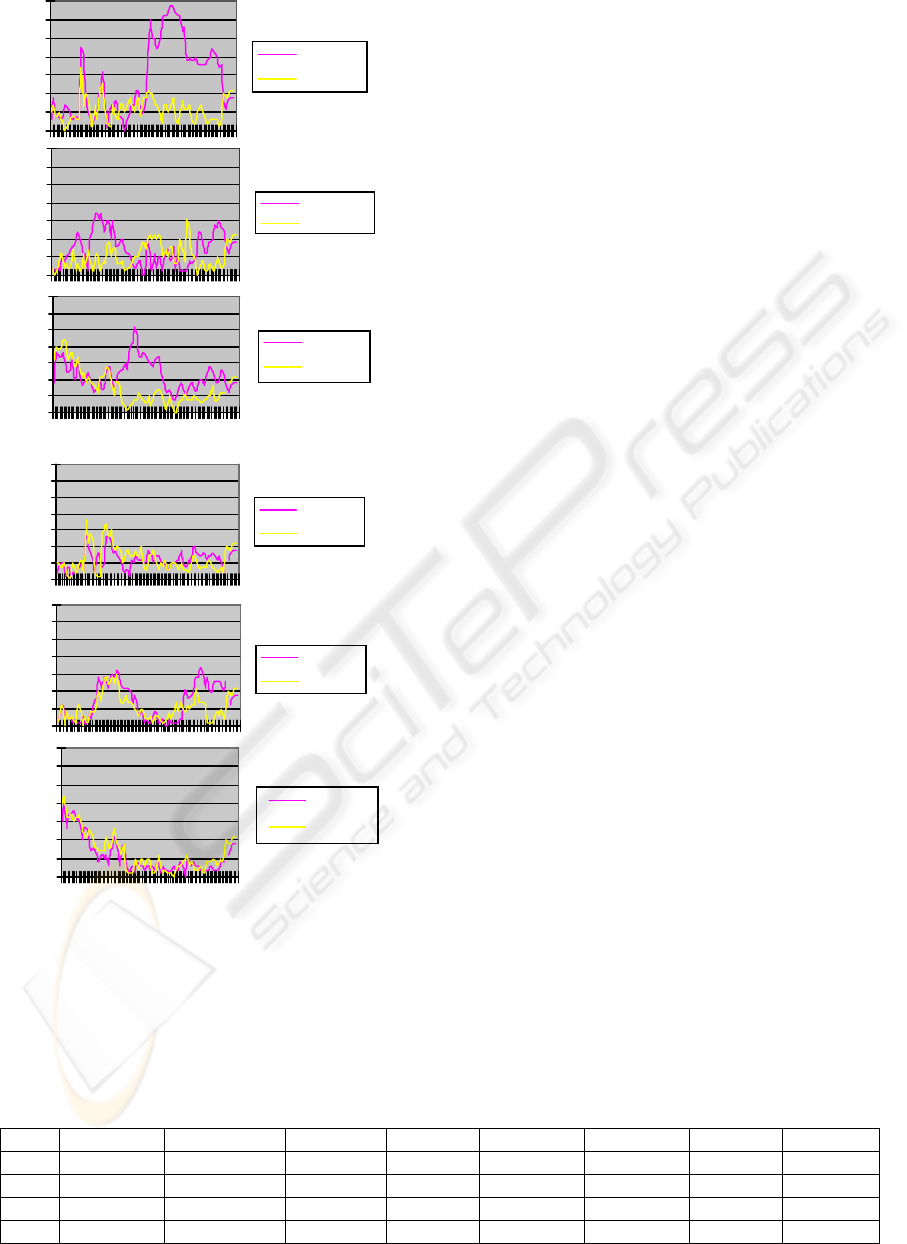
Figure4 shows the accuracy results of tracking
accuracy with 40 particles for each target from
frame No.400 to frame No.700 every four frames.
The horizontal axis means the No. of frame and the
vertical axis means the distance. The smaller the
distance is, the higher the tracking accuracy is.
Method MSPFU can track multi-target correctly
with small distance from the ground truth, while
method PF is failure in tracking target A and target
C during this sequence. Figure5 gives the results of
tracking accuracy with 100 particles for each target.
We can see both of MSPFU and PF can track multi-
target correctly here, while method MSPFU has
better tracking accuracy on target B than method PF.
We also give the average distance on the test
frames. Table1 is average distance result of tracking,
where PN means particle number, TPF means
processing time per frame, AD_A means average
distance of target A and CT_A means if target A is
correctly tracked or not. From the result of table1,
we can see using more particles will take more
ROBUST MULTI-TARGET TRACKING USING MEAN SHIFT AND PARTICLE FILTER WITH TARGET MODEL
UPDATE
609
0
5
10
15
20
25
30
35
PF_A
MSPF U_A
0
5
10
15
20
25
30
35
PF_C
MSPFU_C
0
5
10
15
20
25
30
35
PF_B
MSPFU_B
Figure 4: Tracking accuracy results with 40 particles.
Figure 5: Tracking accuracy results with 100 particles.
tracking time. Method MSPFU can keep correct
tracking with less particles than method PF. The
average distance of method MSPFU with 100
particles is smaller than that of method PF, which
shows the method MSPFU have better tracking
accuracy.
5 CONCLUSIONS
We presented a novel multi-target tracking
algorithm combining Particle Filter and Mean Shift
with an adaptive target model update process. The
Mean Shift is inserted into Particle Filter framework
in order to make each particle independent and
therefore more flexible to local conditions, thus
reduce the particle number in initialization stage. In
our paper, the adaptive target model update process
is important to solve the problem of object occlusion
and illumination changes. Experimental results
showed that the proposed algorithm is faster and
more accurate than PF and TSHT method, and more
reliable than Mean Shift. From the experiment, we
find the computational complexity is related by the
number of particles and the target model. Future
work includes tracking a variable number of targets
in a dynamic scene and investigating new target
model.
REFERENCES
Comaniciu, D., Ramesh, V. and Meer, P., 2003, Kernel-
based object tracking. IEEE Trans. on Pattern Analysis
and Machine Intelligence, vol.25, no.5, 564–577.
Arulampalam, M. S., Maskell, S., Gordon, N. and Clapp,
T., 2002, A tutorial on particle filters for online
nonlinear/non-gaussian bayesian tracking. IEEE
Transactions on Signal Processing, vol.50, no.2, 174–188.
Maggio, E. and A. Cavallaro., 2005, Hybrid Particle Filter
and Mean Shift tracker with adaptive transition model.
In Acoustics, Speech, and Signal Processing, 221- 224.
Yang, C.J., Duraiswami, R. and Davis, L.S., 2005, Fast
Multiple Object Tracking via a Hierarchical Particle
Filter. ICCV 2005, 212-219
Yizheng Cai, Nando de Freitas, James J., 2006, Little:
Robust Visual Tracking for Multiple Targets. ECCV
2006, 107-118
Nummiaro K, Koller-Meier E, Van Gool L., 2002, Object
tracking with an adaptive color-based particle filter.
Symposium for Pattern Recognition of the DAGM,
353-360
Shan, C., Wei, Y., Tan, T., Ojardias, F., 2004, Real Time
Hand Tracking by Combining Particle Filtering and
Mean Shift. In: International Conference on Automatic
Face and Gesture Recognition. 669-674.
http://Homepages.inf.edac.uk/rbf/CAVIAR., 2004
Table 1: Results of tracking accuracy on video two with 40 and 100 particles.
PN Method TPF(ms) AD_A CT_A AD_B CT_B AD_C CT_C
40 PF 400 14 False 7 Ok 11 False
40 MSPFU 436 5 Ok 4 Ok 7 Ok
100 PF 722 5 Ok 6 Ok 5 Ok
100 MSPFU 743 5 Ok 4 Ok 6 Ok
0
5
10
15
20
25
30
35
PF_C
MSPFU_C
0
5
10
15
20
25
30
35
PF_B
MSPFU_B
0
5
10
15
20
25
30
35
PF_A
MSPFU_A
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
610
