
SPATIAL NEIGHBORING HISTOGRAM FOR SHAPE-BASED
IMAGE RETRIEVAL
Noramiza Hashim
1, 2
, Patrice Boursier
1
1
Laboratoire Informatique,Image et Interaction (L3iI), Universite de La Rochelle, 23 Avenue Albert Einstein
17071 La Rochelle Cedex 9, France
Hong Tat Ewe
2
2
Faculty of Information Technology, Multimedia University, Jalan Multimedia, 63100 Cyberjaya, Selangor, Malaysia
Keywords: Building recognition, shape histogram, spatial neighboring.
Abstract: Man-made object recognition from ground level image requires a fast and efficient approach especially in a
large image database. Our work focuses on recognizing buildings based on a shape-based histogram
descriptor. A 2-dimensional histogram is generated from gradient direction information of edge pixels and
local spatial analysis of its neighbors. The edge direction histogram is a global representation of edge pixels.
The neighborhood structure is coded in a 4-bit binary representation which offers a simple and efficient way
to incorporate local spatial data into the histogram. We find that the proposed spatial neighboring histogram
increases the retrieval precision by approximately 10% compared to other shape-based histogram methods.
1 INTRODUCTION
Images can be exploited to various purposes. In an
urban scene, images of building can be used to get
additional information on the building or the
surrounding environment. The problem of
recognizing buildings from aerial images has been
extensively studied throughout the years. Although
building recognition from ground level images has
not been as widely researched as its counterpart, it
has gained more interest from the research
communities due to the rapid development of digital
imaging around the world.
In content based-image retrieval, one of the
earlier approaches in this area may include the use of
edge direction based features (Vailaya et al., 1998),
which was found to produce optimum result in
distinguishing city versus landscape images. Man-
made objects in city scenes usually have strong
vertical and horizontal edges compared to non-city
scenes where the edges are randomly distributed in
various directions. This property might be useful to
identify building in images. In (Iqbal & Aggarwal,
1999), retrieval by classification was investigated
using perceptual grouping to extract structures
containing man-made object. These structures
include straight and linear lines, junctions, graph and
polygons. In Consistent Line Clusters (Li & Shapiro,
2002), the lines extracted from images were grouped
into clusters. Inter-cluster and intra-cluster
relationships were exploited to recognize complex
object, in particular buildings. A hierarchical
approach was employed for recognition of building
in (Zhang & Kosecka, 2005). A localized color
histogram, constructed based on pixels whose
orientation complies with main vanishing directions,
was used in combination with a keypoint descriptor.
In our work, we employed a shape descriptor
for building recognition. The objective is to
implement fast and simple methods for recognizing
man-made objects. For this reason, histogram-based
method was chosen as a basis for the method we
developed.
The use of histogram is acknowledged as a
powerful tool in image retrieval systems. The edge
direction histogram is used in (Vailaya et al., 1998)
as a shape-based attributes but it ignores the
relationship between edge pixels. To overcome this
kind of limitation, (Chalechale & Mertins, 2002)
integrates spatial information into a histogram in
Edge Pixel Neighboring Histogram or EPNH.
Information about the neighbors of edge pixels is
256
Hashim N., Boursier P. and Tat Ewe H. (2008).
SPATIAL NEIGHBORING HISTOGRAM FOR SHAPE-BASED IMAGE RETRIEVAL.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 256-259
DOI: 10.5220/0001075302560259
Copyright
c
SciTePress
obtained in form of codes which are used to produce
the neighboring histogram. The correlation between
edge pixels was added to the edge direction
histogram in Edge Orientation Autocorrelogram or
EOAC (Mahmoudi et al, 2003).
Our method involves finding and representing
significant pixels in a histogram and associates a
local image descriptor to each edge pixel. This
descriptor is built based on the gradient direction of
the edge pixels and the positions of the surrounding
edge pixels. We define the latter as the spatial
neighboring property. The analysis of the
surrounding pixels is based on the local binary
pattern or LBP (Ojala et al, 1999). The LBP operator
was developed as a gray-scale invariant texture
measure in images. It generates a binary code that
describes the local texture pattern. We have adapted
the LBP operator to be used with the edge
orientation information in order to describe the
spatial structure of the local edge pixels. Our method
combines both the low level edge feature (i.e.
gradient direction) and the middle level edge feature
(i.e. spatial information).
The next section contains further description of
our method. In section 3, an explanation of the
experimental setup and results for image retrieval
process is presented followed by discussion and
recommendation for future works in the last section.
2 SPATIAL NEIGHBORING
HISTOGRAM
The spatial neighboring histogram is a two
dimensional histogram comprising the gradient
direction in one dimension and the spatial
neighboring property in the other dimension.
It is constructed in three stages. The first stage
calculates the edge direction using the Canny edge
detector. The second stage is the analysis and coding
of the neighborhood pixels’ pattern. The last stage
combines this information to construct the
neighboring structure two-dimensional histogram.
2.1 Edge Direction
The directions of edge pixels can capture the general
shape information and can be used for
discriminating cue especially in the absence of color
information (Veltkamp, 2001). We use the Canny
edge detector to find the edge map of an image.
The edges are then quantified into a fixed
number of bins according to their direction. This
constructs the original edge direction histogram or
EDH. It is invariant to translation; the positions of
the objects in the image have no effect on the edge
directions. The histogram is normalized by the total
number of edge pixels to achieve scale invariance.
2.2 Spatial Neighboring Property
After the edge direction histogram is constructed, an
analysis of the surrounding edge pixels is performed
inside a 3 by 3 window. This local analysis will
associate the edge pixels to its corresponding spatial
neighboring property.
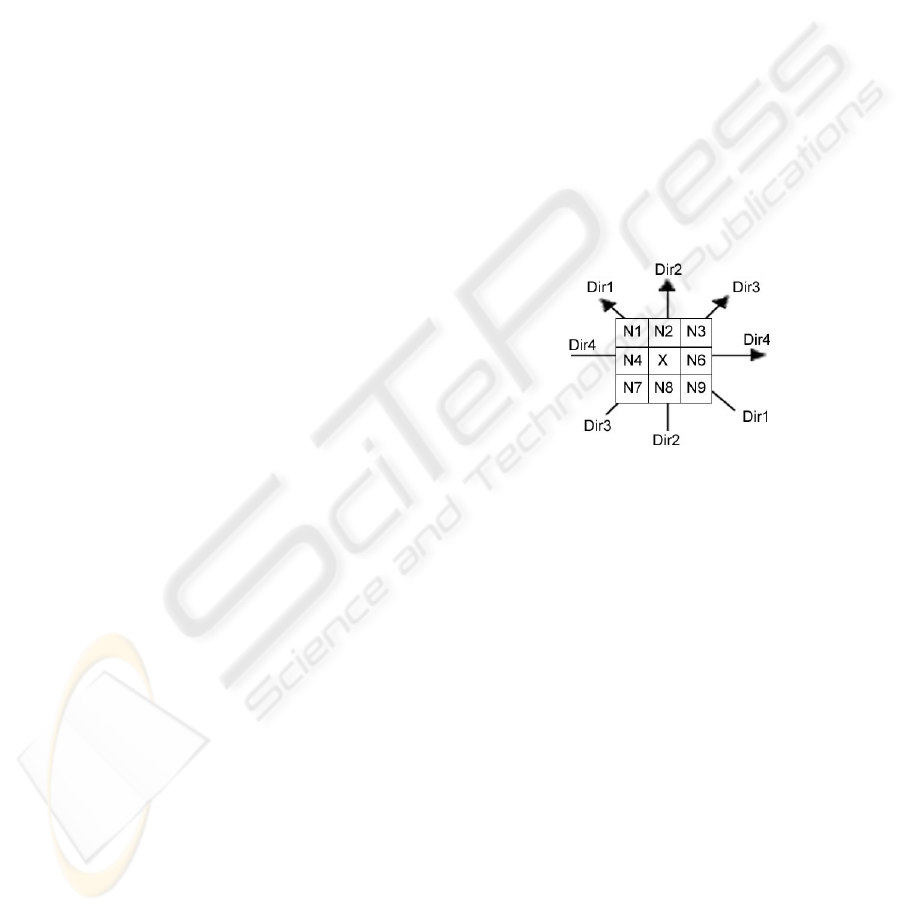
An edge pixel can have zero neighbors (i.e.
solitary pixel) and up to 8 neighbors. We define four
main directions with respect to the position of the
neighbors, which is shown in figure 1. X is the
center edge pixel and N1 to N9 are the neighbor
edge pixels.
Figure 1: Neighbor pixels and the four main directions.
Each direction is associated with a type of
neighbor, named T1, T2, T3 and T4 respective of the
four directions. For example, the neighbor pixel N1
and N9 are both in the direction Dir1 and they are
the neighbors of type T1.
We consider a type of neighbor as present if
there is at least one neighbor pixel (belonging to the
type) found. For example, if an edge pixel has 3
neighbors at the position N1, N2 and N8, it will be
classified as having the two types of neighbor
present i.e. type 1 for N1 and type 2 for N2 and N8.
An edge pixel can have zero type of neighbor
present to all the fours types of neighbor present. All
the possible combination of present and absent edge
pixels creates sixteen distinctive patterns. These
combinatorial patterns can be coded in 4 bits with
each bit representing a type of neighbor. Thus, the
coding of the different patterns becomes a simple
binary number representation ranging from [0000] to
[1111].
SPATIAL NEIGHBORING HISTOGRAM FOR SHAPE-BASED IMAGE RETRIEVAL
257
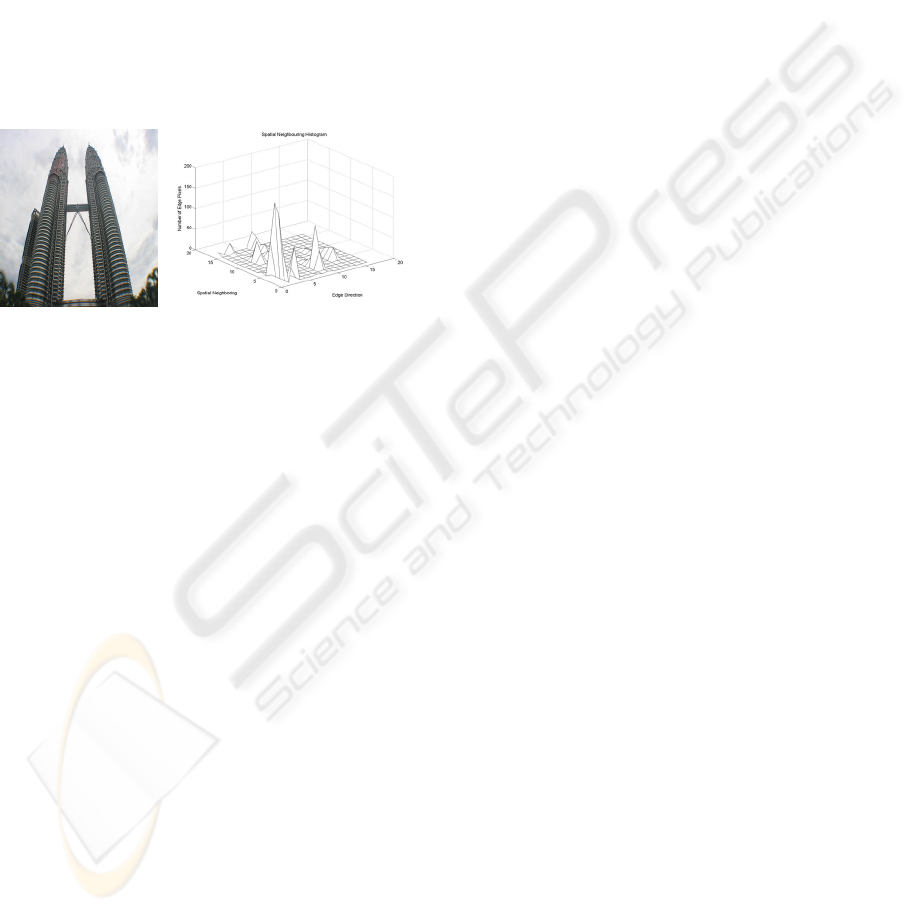
2.3 Histogram Construction
In this last stage, the spatial neighboring histogram
is generated. This histogram is a two-dimensional
histogram; one dimension represents the edge
direction information, in n equally spaced bins and
another dimension represents the 16 possible
combinations of the neighboring edge pixels. We
have chosen n equals 16 bins; therefore, the
histogram matrix has 16 rows and 16 columns.
Each <i,j> element of this matrix ( 1≤ i ≤16
and 1≤ j ≤16) represents the number of edge pixels
in a direction i with the combinatorial pattern j. An
example of the spatial neighboring histogram is
shown in figure 2.
Figure 2: An image of a building and its corresponding
Spatial Neighboring Histogram.
3 RETRIEVAL PROCESS
The methodology used for evaluating the
performance of our method is presented in this
section. The similarity measure, image databases
and explanation of our retrieval evaluation are
described in subsection 1, 2 and 3 respectively. The
last subsection present the retrieval results obtained
from our experiment.
3.1 Similarity Measure
For image retrieval, instead of employing exact
image matching, a similarity measure is calculated
between a query image and images in the database.
The result is a list of images rank by their
similarity to the query image. This result depends on
the type of distance or similarity measurement used
during retrieval process. The Histogram Intersection
property is used to calculate the similarity between
two histograms.
3.2 Image Database
To evaluate the performance of the retrieval system,
we compare the retrieval result of our method
against the two alternative methods described in the
previous sections applied to the same image
database.
The image database used for this experiment
contains two different image sets; training set and
query set. Each set contains 50 images of 10 classes
of building with 5 different acquisitions for each
class. The images are chosen such that they feature
the standard frontal view of a building taken at
ground level. The images also have minimal
occlusions and rotations.
For the training set, the histogram matrix of the
images is extracted offline and stored in a database.
For the test phase, we use the query set. This query
set contains the same classes of building but with
different acquisitions. The histogram intersection
distance will be between histograms of the query
image and of each image in the database. The results
will then be sort from the closest match to the
farthest match.
3.3 Performance Evaluation
The retrieval performance is analyzed in term of
retrieval accuracy and the average normalized
modified retrieval rank (ANMRR) proposed in
MPEG-7 (Manjunath et al, 2002).
The retrieval accuracy concerns two metrics;
recall and precision rates. Recall is defined as the
proportion of relevant images in the database that
are retrieved in response to a query. Precision is
defined as the proportion of the retrieved images that
are relevant to a query.
The ANMRR combines the precision and recall
information as well as the rank information among
the retrieved images. ANMRR are in the range of
[0,1]. The smaller the ANMRR, the better the
retrieval performance is.
3.4 Results
The retrieval accuracy evaluation, we have
calculated the average value of precision and recall
rates for all 50 query images. We compare the
performance of our method against three other
similar methods: Edge Direction Histogram (EDH),
Edge Orientation Auto-Correlogram (EOAC) and
Edge Pixel Neighboring Histogram (EPNH).
The EDH is chosen as an edge orientation
based method while EPNH acts as a basis for spatial
one dimensional histogram based on LBP. The
EOAC is chosen in order to compare our method
with another edge-based technique using two-
dimensional orientation-based histogram.
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
258
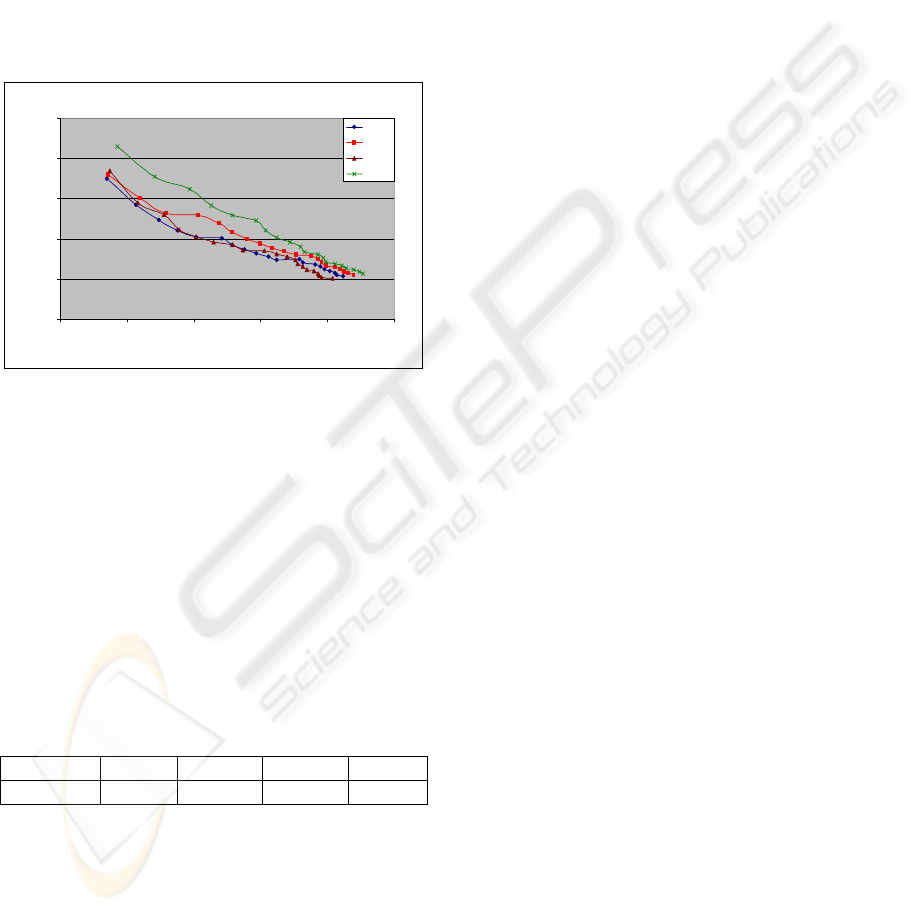
Figure 3 shows the precision versus recall plot
for comparing the performance of methods. From
the plot, it is noted that our method (SNH)
outperformed the other three methods with higher
precision for the same recall rate. For top rank
match, SNH obtains the highest precision rate of
0.86 followed by EOAC, EPNH and EDH with 0.74,
0.72 and 0.70 respectively.
For ANMRR evaluation, we exploit the top 5
retrieved images for a query images and calculate
the NMRR. Then, we calculate the ANMRR for all
50 query images. The result obtained is shown in
table 1.
Precision v s. Recall
0%
20%
40%
60%
80%
100%
0% 20% 40% 60% 80% 100%
Recall (% )
Precision (%)
EDH
EPNH
EOAC
SNH
Figure 3: Performance comparison between SNH (our
method), EDH, EPNH, and EOAC.
The experimental results have indicated that our
method is capable of obtaining an acceptable
performance in terms of ANMRR. SNH has the
lowest ANMRR followed by EPNH. Lower value of
ANMRR shows that our method has better result
than the other three methods. The results also show
that, for EOAC and EDH, their performance is at
approximately the same level. These results have
indicated that our method is efficient and capable of
producing a good performance.
Table 1: Comparison of ANMRR for SNH, EPNH, EOAC
and EDH.
SNH EPNH EOAC EDH
ANMRR 0.4500 0.4935 0.5630 0.5625
4 CONCLUSIONS
Our study has shown that integrating spatial
neighborhood information into a histogram can
increase the retrieval system performance. The
separate use of the edge and LBP information
produces good retrieval result. In our work, we have
shown that combining both properties can further
improve a system’s performance. For images of
man-made structure such as buildings, SNH
produces better results when compared to other
similar methods.
Although our method is simple and
straightforward, the experimental results have shown
that it is capable of improving the retrieval precision.
For future work, further tests with large-scale image
database are expected. We also plan to integrate
other features to the histogram in order to improve
its efficiency.
REFERENCES
Chalechale, A & Mertins, A 2002, ‘Semantic Evaluation
and Efficiency Comparison of the Edge Pixel
Neighboring Histogram in Image Retrieval’,
Proceedings of the First Workshop on the Internet,
Telecommunication and Signal Processing, vol. 1, pp.
179–184.
Iqbal, Q & Aggarwal, J.K. 1999, ‘Applying perceptual
grouping to content-based image retrieval: Building
Images’, Proceedings of the IEEE International
Conference of Computer Vision and Pattern
Recognition, pp. 42-48.
Li, Y & Shapiro, LG 2002, ‘Consistent line clusters for
building recognition in CBIR’, Proceedings of the 16
th
International Conference of Pattern Recognition,
vol.3, pp. 952-956.
Manjunath, BS, Salembier, P & Sikora, T 2002,
‘Introduction to MPEG-7’, John Wiley & Sons Ltd.
Mahmoudi, F, Shahbenzadeh, J, Eftekhari-Moghadam, A-
M & Soltanian-Zadeh, H 2003, ‘A new non-
segmentation shape-based image indexing method’,
Proceedings of the IEEE International Conference on
Acoustics, Speech, and Signal Processing, vol.3, pp.
III-17-20
Ojala, T, Pretikainen, M & Harwood, D 1999, ‘A
Comparative Study of Texture Measures with
Classification Based on Feature Distribution’, Pattern
Recognition, vol. 29(1), pp 51-59.
Vailaya, A, Jain, A & Zhang, HJ, 1998, ‘On Image
Classification: City vs. Landscape’, Proceedings of the
IEEE Workshop on Content-Based Access of Image
and Video Libraries, pp. 3 -8.
Veltkamp, RC 2001, ‘Shape Matching: Similarity
Measures and Algorithms’, Proceedings of Shape
Modelling International, pp 188-197.
Zhang, W & Kosecka, J 2005, ‘Localization Based on
Building Recognition’, Proceedings of the 2005 IEEE
Computer Society Conference on Computer Vision
and Pattern Recognition, vol. 3, p. 21.
SPATIAL NEIGHBORING HISTOGRAM FOR SHAPE-BASED IMAGE RETRIEVAL
259
