
IMAGE SEQUENCE STABILIZATION USING FUZZY KALMAN
FILTERING AND LOG-POLAR TRANSFORMATION
Nikolaos Kyriakoulis, Antonios Gasteratos
Department of Production and Management Engineering, Democritus University of Thrace, Xanthi, Greece, GR67100
Angelos Amanatiadis
Department of Electrical and Computer Engineering, Democritus University of Thrace, Xanthi, Greece, GR67100
Keywords: Image stabilization, fuzzy systems, log-polar, Kalman filter, optical flow.
Abstract: Digital image stabilization (DIS) is the process that compensates the undesired fluctuations of a frame’s
position in an image sequence by means of digital image processing techniques. DIS techniques usually
comprise two successive units. The first one estimates the motion and the successive one compensates it. In
this paper, a novel digital image stabilization technique is proposed, which is featured with a fuzzy Kalman
estimation of the global motion vector in the log-polar plane. The global motion vector is extracted using
four local motion vectors computed on respective sub-images in the log-polar plane. The proposed
technique exploits both the advantages of the fuzzy Kalman system and the log-polar plane. The
compensation is based on the motion estimation in the log-polar domain, filtered by the fuzzy Kalman
system. The described technique outperforms in terms of response times, the output quality and the level of
compensation.
1 INTRODUCTION
Digital stabilization aims at preserving the
intentional camera movements, while it smoothes
the video output from unwanted oscillations. Almost
any acquired image sequence is affected by noise
and undesired camera jitters. Depending on the
application those unwanted fluctuations are caused
by a rough terrain, the shaking of the hand carrying
the camera etc. Image stabilization is a necessity, as
vision plays a key role to many applications and,
therefore, the output of the image sequence should
be free from noise, and should be smooth enough so
that useful results to be extracted. Image
stabilization is application depended. In the case of a
camera mounted on an active servo mechanism, the
undesired oscillations are mostly the rotational ones
and the stabilization is implemented by servo
motors, which compensate the pan and the tilt
camera movement, respectively. This technique is
known as optical stabilization (Sato et al., 1993). In
case that electronic hardware is utilized to
compensate the sensed camera moves the
stabilization is referred as electronic (Morimoto and
Chellappa, 1996). Finally, when only pure image
processing techniques are adopted then it is known
as digital image stabilization. This is the process of
preserving the intended camera motion, while
removing the unwanted noise and motion effects
with the utilization of digital image processing (Ko
et al., 1998). DIS has been applied to many
applications, either real-time or non real-time.
A DIS system is composed by two successive
units: the motion estimation and the motion
compensation one. The first unit aims at the
computation of the global motion vector. The
estimation phase is being followed by the
compensation processing unit. The produced
compensation vector finally shifts the current frame
to acquire an image sequence, which is free from
irregularities, keeping only the desired global
motion. There is a wide use of fuzzy logic in image
processing applications (Chanon et al., 2002). In
case of non-linear and ambiguous applications fuzzy
logic is probably the finest solution.
Various techniques have been developed for the
global motion vector calculation, such as phase
correlation matching (Kwon et al., 2005) or
469
Kyriakoulis N., Gasteratos A. and Amanatiadis A. (2008).
IMAGE SEQUENCE STABILIZATION USING FUZZY KALMAN FILTERING AND LOG-POLAR TRANSFORMATION.
In Proceedings of the Third International Conference on Computer Vision Theory and Applications, pages 469-475
DOI: 10.5220/0001071404690475
Copyright
c
SciTePress
normalized cross correlation (Hsu et al., 2005). A
real-time implementation that adopts the two
images’ matching through the Fourier-Mellin
transformation has been reported in (Martinez et al.,
2004). The use of fuzzy logic for the global motion
vector computation can produce optimal results
(Güllü and Ertürk, 2004). In order to enhance the
compensated frame position Kalman filtering was
utilized (Hsu et al., 2005, Ertürk, 2002). The
estimation of the motion in a sequence is also
realized by optical flow techniques. The
approximation of the image flow field provides both
the translational and rotational information. The
undesired motion effects are calculated in (Suk et
al., 2005) by estimating the rotational center and the
angular frequency from the local translational
motion definition by fine-to-coarse multi-resolution
motion estimation. In (Pauwels et al., 2007) the
stabilization is accomplished by fixating at the
central image region, whilst optical flow estimation
optimizes this approximation. In most of the cases
the global motion vector is computed via a series of
local motion vectors. These describe the movement
in a particle of the image, which results to a better
estimation of the indented camera movement and the
undesired motion.
In this paper, a novel fuzzy Kalman digital
image stabilization technique in the log-polar plane
is proposed. First a transformation from the
Cartesian plane to the log-polar one takes place. The
acquired log-polar image sequence provides lesser
information in the background of the scenery than in
the foreground. This is due to the proper attribute of
the log-polar transformation to preserve high-
resolution at the center of the image, which
diminishes logarithmiticaly towards the periphery.
The motion estimation in the log-polar plane
provides a space-variant distribution of the local
motion vectors due to the aforementioned nature of
the log-polar plane. Consequently, the extracted
local motion vectors are imported into a recursive
fuzzy system based to the one presented in (Güllü
and Ertürk, 2004). However there are some distinct
differences. One lies to the fact that in this paper, the
fuzzy system utilizes the Kalman filter’s
mathematical model to filter the inputs
straightforwardly. Moreover, no mean operation
filtering takes place to the measured fluctuations.
Finally, the filtered vectors, define the global motion
vector from which the compensation vector is
calculated. The innovation of using log-polar images
for the motion field extraction provided optimal
results not only to the stabilization of each frame,
but also to the visual quality of the video output. The
advantages of the log-polar plane are well exploited,
as (i) the processing time is lesser, (ii) a single
motion estimation extraction provides information
for both the rotational and translational irregularities
and (iii) the center of attention has a higher impact
to the whole process without further preprocessing.
2 LOG-POLAR
TRANSFORMATION
The motion estimation process preserves high
computational burden, so it is normally improper for
real-time applications. One way to overcome the
computational burden is to sub-sample the images.
Yet, to estimate the motion field, all available
information is needed. Thus, a resolution decrease is
inappropriate as it causes loss of major information
and the provided results are sparse and inaccurate.
However, the volume of the image data can be
reduced by a topological arrangement, without loss
of information. Notably, a space-variant
arrangement such as log-polar provides lesser image
data without constraining the field of view, or the
image resolution at the fixation point. The log-polar
transformation is based on the human’s eyes
projections of the retina plane to the visual cortex. It
finds its origins into studies on the vision
mechanisms of the primates. The adoption of this
topology into artificial vision systems exhibits
several advantages as in visual attention, throughput
rate and real-time processing. Many applications of
the log-polar transformation have been reported,
such as the time-to-impact estimation (Tistarelli and
Sandini, 1993), wavelet extraction based on log-
polar mapping (Pun and Lee, 2003), tracking (Metta
et al., 2004) and disparity estimation and vergence
control in (Manzotti et al., 2001).
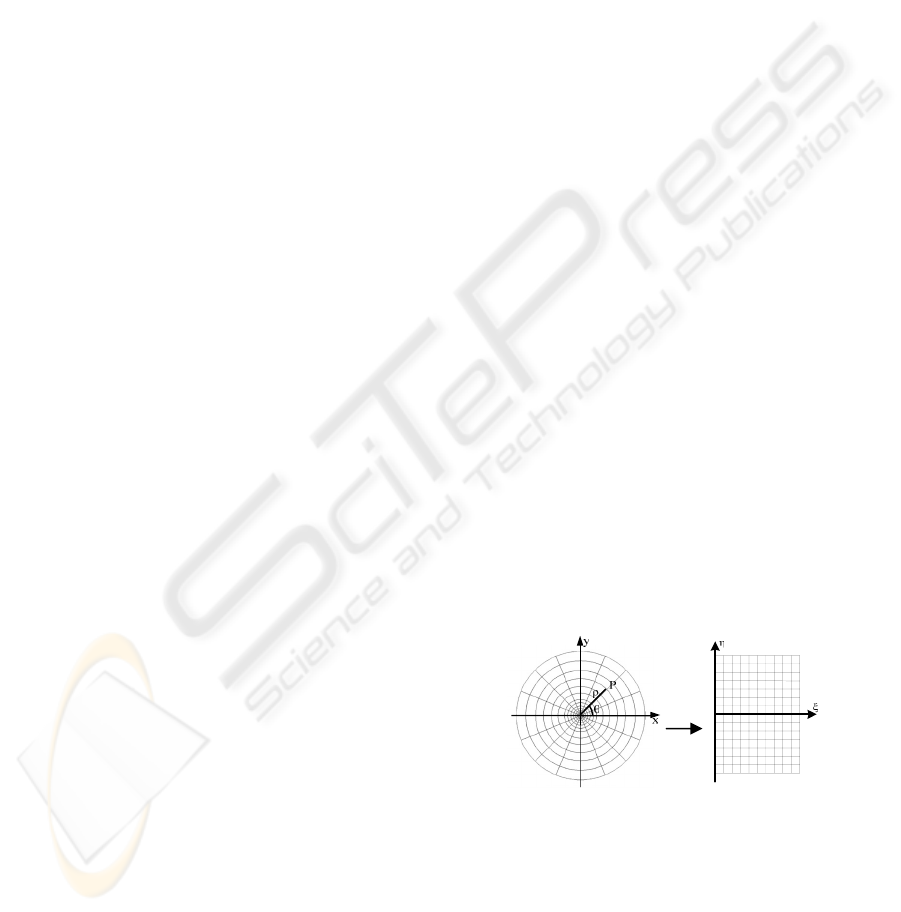
Figure 1: The log-polar transformation maps radial lines
and concentric circles into lines parallel to the coordinate
axes.
The mathematical model of the log-polar
mapping can be expressed as a transformation
between the polar plane (ρ, θ) (retinal plane), the
log-polar plane (η, ξ) (cortical plane) and the
Cartesian plane (x, y) (image plane).
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
470
Assuming that Nr is the number of cells in the
radial direction and Na is the number of cells in the
angular direction the mapping from the polar
coordinates (ρ, θ) to the log-polar ones (η, ξ) is
defined as:
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
0
log
ρ
ρ
ξ
a
(1)
η
π
γ
α
2
N
=
(2)
where
ξ
counts the rows,
γ
the column and
0
ρ
is
the radius of the fovea circle. The logarithmic basis
α is obtained from the foveal radius, the image
radius
max
ρ
and the radial resolution Nr.
0
max
ρ
ρ
α
=
r
N
or
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
=
0
max
ln
1
ρ
ρ
α
r
N
e
(3)
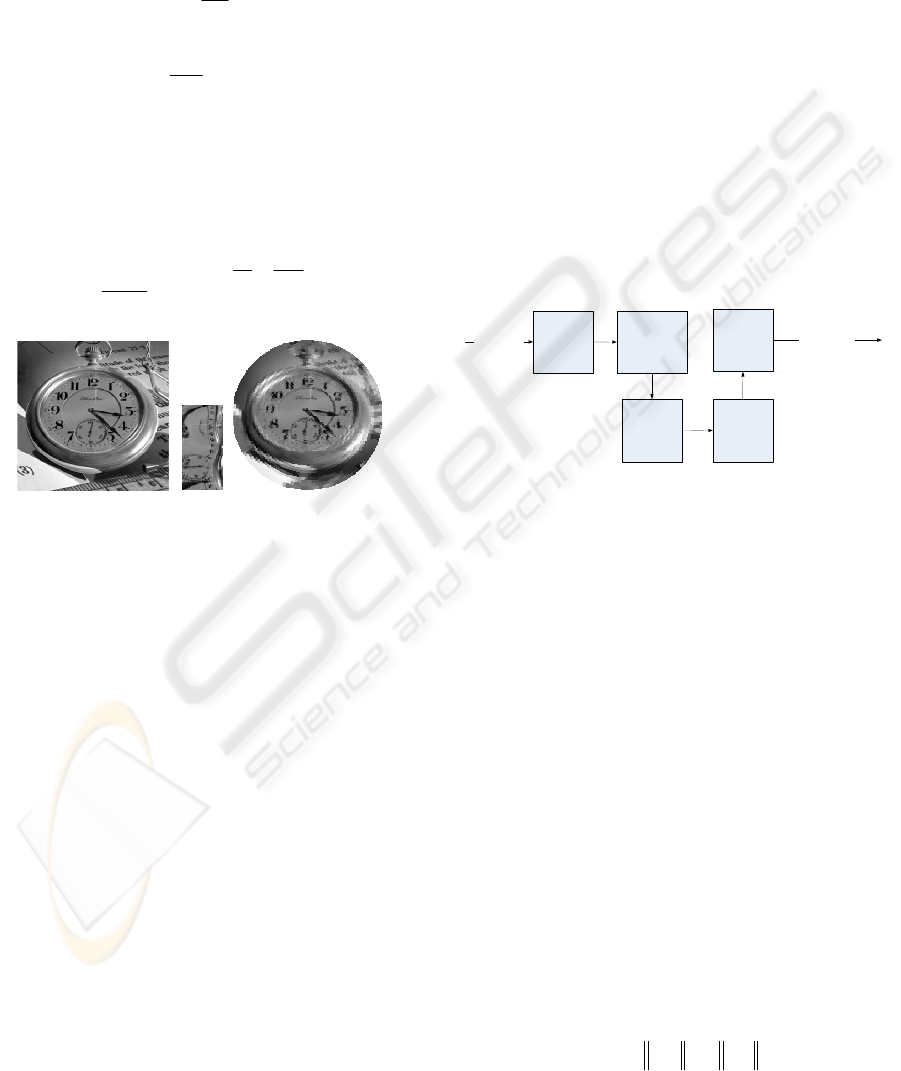
(a) (b) (c)
Figure 2: (a) Cartesian image; (b) log-polar image and (c)
reconstructed Cartesian from log-polar image.
3 ESTIMATION OF THE
MOTION
The proposed system intents to produce stabilization
control signals from an image sequence by digital
image processing in the log-polar plane.
Independently of the adopted technique for the
motion estimation, the whole process has shown
robustness and the output video had been
compensated in a way that the visual quality to be as
smooth as possible.
To test the proposed concept two different
motion estimation techniques were implemented: a
differential optical flow method, from where the two
dimensional image displacements are extracted, and
a block matching algorithm (Mahmoud et al., 2006).
The measures from the block-matching algorithm
are accurate enough, despite the erroneous flow
values introduced in polar deformation, due to the
fictitious gray-value curvature in the polar image
(Daniilidis and Krüger, 1995). In order to attenuate
the aliasing effects and to reduce the error in the
computation of the spatial gradient appropriate
filtering is needed. Notwithstanding, a full-search
frame matching is robust enough but suffers from
high computational cost even when the amount of
information has already been reduced due to the log-
polar transformation. On the other hand, the optical
flow technique provided shorter processing time and
it was finally selected for the system
implementation.
The global motion estimation vector is fed to
the proposed fuzzy Kalman system. This
accomplishes the operation of the motion estimation
filtering from which the compensation vector is
extracted. The compensation unit processes the
provided information of the estimation unit and
produces the final stabilized video. The block
diagram of the proposed system is shown in the
Figure 3.
Figure 3: The block diagram of the proposed system.
3.1 Optical Flow and Image
Translation
The image motion is basically the three dimension
motion projection of the real world onto the two-
dimensional image plane. This is expressed as either
image velocities or image displacements in the x and
y axes. These vectors comprise the optical flow
field. Optical flow techniques are widely used in
many applications and calculating approaches and
are divided in three main categories: the differential
techniques, the frequency based ones and the
matching methods (Barron et al., 1997). The
implemented calculation method is a differential
one. The image velocity is computed from
spatiotemporal derivatives of the image intensities
assuming continuity to the image domain.
The Horn and Schunk optical flow technique,
which was implemented in this paper, combines the
gradient constraint with a global smoothness factor
in order to constraint also the optical flow field
v(x,t)=(u(x,t),v(x,t)), which by minimization gives:
x)(v)(
2
2
2
2
22
dvuI
D
∇+∇+⋅∇
∫
λ
(4)
Image
sequence
aquisition
Video input
Local
motion
vectors
Fuzzy
System
Stabilized
Video output
Log-polar
transformation
Kalman
Filter
IMAGE SEQUENCE STABILIZATION USING FUZZY KALMAN FILTERING AND LOG-POLAR
TRANSFORMATION
471

where D is the domain in which the equation is
defined, and the magnitude of λ influences the
smoothness factor.
By solving iteratively a new set of velocities is
computed from the derivatives and the average of
the previous velocities. The velocities equations
obtained are:
222
1
][
yx
t
k
y
k
xx
k
k
IIa
IuIuII
uu
++
++
−=
−
(5)
and
222
1
][
yx
t
k
y
k
xy
k
k
IIa
IvIvII
vv
++
++
−=
−
(6)
where k denotes the iteration number, which by
experiments was set to 25, as it provided better
results.
The initial velocities u
0
, v
0
are set to zero. The
local averages
k
u
and
k
v
are defined as a 3×3
distance weighted Laplacian mask.
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−=
12/16/112/1
6/116/1
12/16/112/1
k
k
uu
(7)
and
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
−=
12/16/112/1
6/116/1
12/16/112/1
k
k
vv
(8)
(a) (b)
Figure 4: The selected sub-images for motion estimation,
in the (a) Cartesian and (b) log-polar plane, respectively.
The horizontal and vertical axes displacements
were initially extracted from selected image regions.
These have a rectangular shape of 440×100 pixels
along the x axis, whist the dimensions along the y
axis are 100×280 pixels, respectively (Figure 4.(a)).
The local motion vectors were calculated from the
respective sub-images at the log-polar plane (Figure
4(b)).
Yet, the motion estimation in the log-polar
plane has some special features that should be taken
into consideration, i.e. the motion vectors are not
transferred straightforwardly from the Cartesian to
the log-polar plane. The final motion estimation
vectors, where computed according to the foretold
considerations, in order to obtain the global motion
vector. The displacements are straightly imported to
the fuzzy Kalman system without any other
processing, such as mean filtering or median values
extraction. However, the high number of iterations
during the optical flow technique implementation
provided as optimal results as possible.
(a) (b)
(c) (d)
40 45 50 55 60 65 70 75
260
262
264
266
268
270
272
274
276
(e)
Figure 5: The optical flow field of two successive images¨
(a) the first frame, (b) is the successive one, (c) the log-
polar transformation of the first frame, (d) the log-polar
transformation of the second one and (e) the optical flow,
estimated on the log-polar plane.
3.2 Motion Estimation Phase
Another critical issue is the noise factor, which
needs to be filtered. The noise is divided into the
measurement and the process noise, which are the
error during the variables calculation and the error
during the whole process, respectively. These
perturb the estimation of the image motion field, and
are present during the global motion vector
1
2 4
1
2
3
4
3
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
472
estimation. The fuzzy system operates as a recursive
filter, since its inputs stem from the Kalman filter.
Two phases occur: the estimation and the correction
one. The recursiveness lies on the fact that an a
priori estimation is calculated and is being corrected
by an a posteriori estimation. The Kalman filter’s
rules are illustrated in (Welch and Bishop, 2001).
The adopted rules from the Kalman filter to the
fuzzy system result in a fuzzy Kalman filtering
system.
The distributed fuzzy Kalman system has two
inputs. The first one is the filtered value in the
current time interval, whilst the second one is the
measured value from the previous time interval. The
estimation equations can be defined as:
1
ˆ
1
−
−
=
kk
xzInput
(9)
1
112
−
−=
kk
InputInputInput
(10)
whilst the correction ones as:
)
ˆ
(
ˆˆ
kkkkk
xHzKxx −+=
−
(11)
where k is the time index,
k
x
ˆ
is the a posteriori
estimate of x and
k
z
denotes the measurement in the
k time index.
The image translation results, exported from the
optical flow, are imported into the proposed fuzzy
Kalman system. The system has two inputs, one for
the current time index and one for the previous time
index, described by (9) and (10). The fuzzy
membership functions for the first input’s
displacements are called negative big, negative,
zero, positive and positive big, whilst the same rules
define the second input’s displacements. Although
the complexity of the problem is quite high, the five
membership functions are sufficient to grant optimal
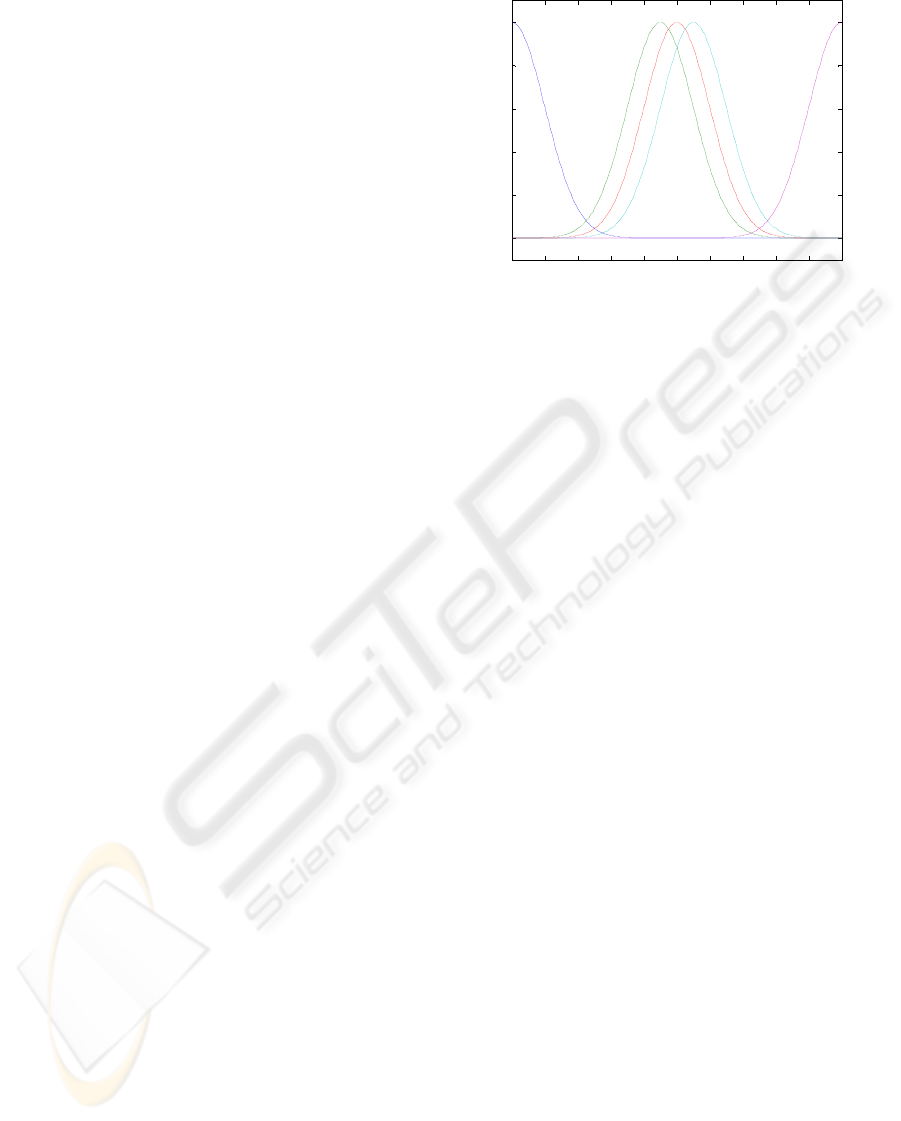
results. The final utilization of the membership
function is illustrated in Figure 6.
Although the rule set is composed of 25 if-then
rules, the response time of the filter was quick and
accurate. Experiments were made introducing two
more membership functions for each input and
output. The effort was focused to cover in a higher
level the step between the positive and negative big
with the positive and negative membership
functions, respectively. The final output showed that
there is a boundary for the accuracy in terms of
complexity, i.e. the higher the complexity, the higher
the accuracy. Still, the same relationship stands for
the response time. Thus, there is a trade-off between
time and accuracy.
-10 -8 -6 -4 -2 0 2 4 6 8 10
0
0.2
0.4
0.6
0.8
1
input1
Degree of membership
NB N Z P PB
INPUT 1
Figure 6: The membership functions of the fuzzy Kalman
filter.
Furthermore, experiments were made for the
computation of the compensation motion vector.
Initially, the output of the fuzzy Kalman system was
directly utilized for the compensation vector. In
addition, a median filtering was implemented to the
output values of the fuzzy system. However, the
compensation vector, which exhibited optimal
results is defined as:
))1()1())((
))1(()(
−−++
−
=
tGMVataGMV
tCMVktCMV
(12)
where t represents the frame number, 0 ≤
a
≤ 1 and
k is a factor for determining the weight between
current frame stabilization and indented camera
movement. Finally, frame shifting is applied when
both horizontal and vertical CMVs are specified.
4 EXPERIMENTAL RESULTS
Image sequences were captured with an active stereo
vision head. Some of the testing input videos were
acquired during an optical stabilization operation of
the head’s servo motors. All of these sequences
suffer from high frequency image jitters, produced
intentionally by the user for testing. They also suffer
from high illumination changes as well as from
fluctuations caused by the servo motors. Further
experiments were made, capturing video on a free
course. These sequences suffer from motion blurred
frames. The remedy to such sequences is a higher
frame rate. As the acquired videos were tuned to
25fps, the fast oscillatory movements during the
course provoked loss of information to a high
degree. The purpose of capturing such noisy and
IMAGE SEQUENCE STABILIZATION USING FUZZY KALMAN FILTERING AND LOG-POLAR
TRANSFORMATION
473
shaky sequences is to assess the proposed algorithm
against complicated and challenging situations.
50 100 150 200
-3
-2
-1
0
1
2
3
4
frames
frame position (pixels)
Stabilization X
compensated
unstabilized
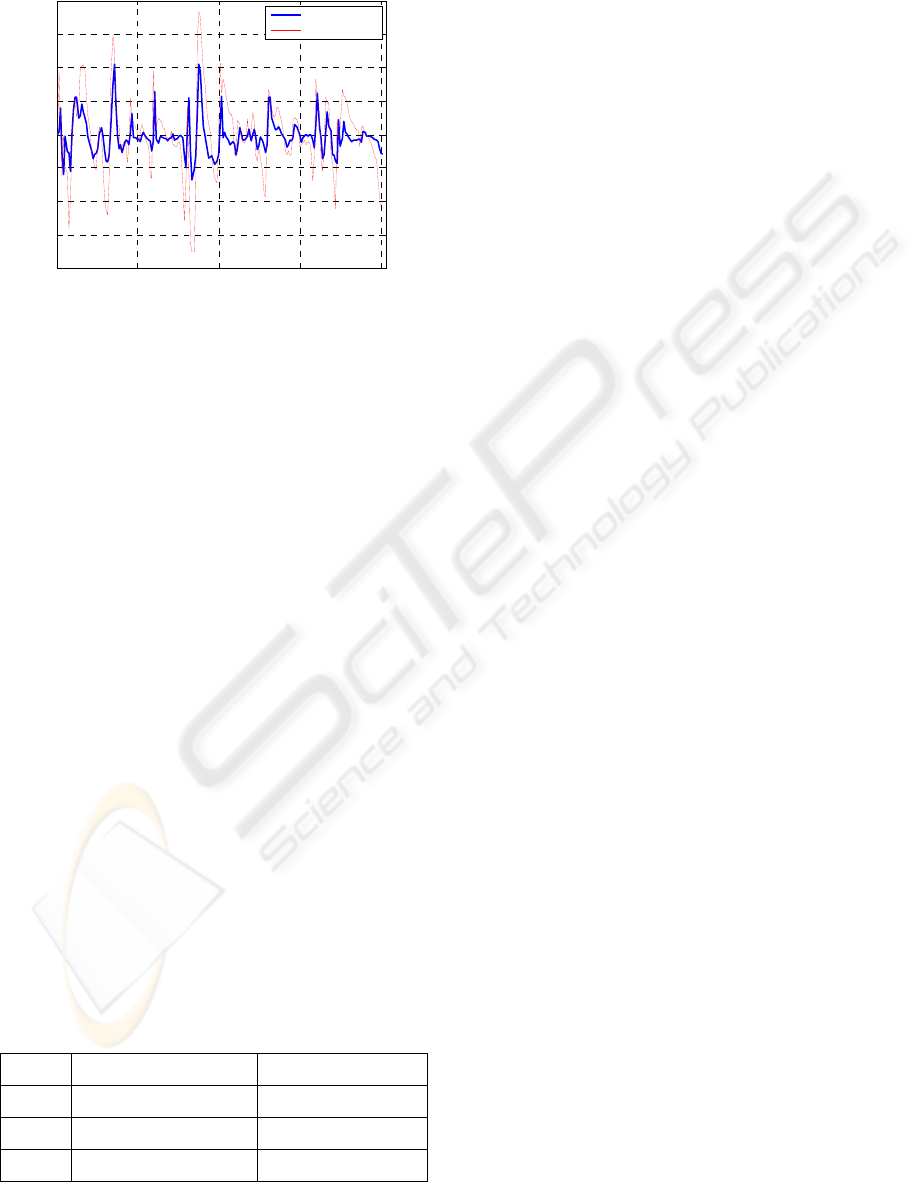
Figure 7: The red line presents each frame position before
stabilization the blue line the stabilized one.
The global motion estimation did not have much
computational burden, as the amount of image data
has been reduced by the log-polar topology
rearrangement, further restricted to four image
regions. On the other hand, the differential flow
technique is resource demanding. Increasing the
number of iterations leads to a quite big
computational load, especially to the image
sequences with higher resolution. The finest results
were made with a decrease of the frame resolution
from the 640×480 initial Cartesian images to the
640×348 log-polar ones. Figure 7 depicts the
compensation of the sequence in regard with the non
stabilized frame positions.
In order to measure the performance of the
stabilization made in the Cartesian and into the log-
polar domain, the Mean Square Error (MSE), the
Least Square Error (LSE) and the Least Mean
Square Error (LSME) were calculated. From the
results, it is clearly shown the superior performance
of the presented technique in this paper. The
estimation of the global motion vector into the log-
polar plane, apart from lesser processing times, it
provides also better performance.
Table 1: Error Calculation Table: The image stabilization
was performed with both cartesian and log-polar images
and the error calculation matrics were computed for both
cases.
Log-polar Cartesian
MSE 0.07946845 0.08332407
LSE 0.00000226 0.00063480
LSME 0.05219010 0.0705261
5 CONCLUSIONS
A new digital image stabilization system was
proposed, which employs a motion estimation
optical flow model in the log-polar plane and a fuzzy
system model based on Kalman filtering method.
The system was fast enough although digital image
stabilization is a high time consuming procedure.
The global motion vector that was provided by the
membership functions interaction resulted in a quite
smooth output after the completion of the
compensation unit. Additionally, the filtering has
provided low noise levels producing a video which
was free from high frequency motion effects,
maintaining optimal visual quality. Concluding, the
proposed system apart from having robustness and
resource demands provides also optimal results fast
and accurately.
ACKNOWLEDGEMENTS
This work was partially supported by the E.C. under
the FP6 research project for Autonomous
Collaborative Robots to Swing and Work in
Everyday EnviRonment “ACROBOTER”, IST-
2006-045530, and under the FP6 research project for
improvement of the emergency risk management
through secure mobile mechatronic support for
bomb disposal, “RESCUER”, IST-2003-511492.
REFERENCES
Sato, K., Ishizuka, S., Nikami, A., Sato, M., 1993. Control
techniques for optical image stabilizing system. IEEE
Transactions on Consumer Electronics, 39(3):461
466.
Morimoto, C. and Chellappa, R., 1996. Fast Electronic
digital image stabilization for off-road navigation.
Real-Time Imaging, 2:285-296.
Ko, S.J., Lee, S.H. and Lee, K.H., 1998. Digital image
stabilizing algorithms based on bit-plane matching.
IEEE Transactions on Consumer Electronics, 44(3):
617-622.
Chanon, M., Aguilar, L. and Delgado, A., 2002. Definition
and applications of a fuzzy image processing scheme.
Proceedings of 2002 IEEE 10th Digital Signal
Processing Workshop and the 2nd Signal Processing
Education Workshop.
Kwon, O., Shin, J. and Paik J., 2005. Video stabilization
using Kalman filter and phase correlation matching.
Lecture Notes in Computer Science, 3656:141-148.
Hsu, S., Liang, S. and Lin, C., 2005. A robust digital
image stabilization technique based on inverse triangle
VISAPP 2008 - International Conference on Computer Vision Theory and Applications
474

method and background detection. IEEE Transactions
on Consumer Electronics, 51(2):335-345.
Martinez-de Dios, J.R. and Ollero A.,2004. A real-time
image stabilization system based on Fourier-Mellin
transform. Lecture Notes in Computer Science,
3211:376-383.
Güllü, M.K. and Ertürk, S., 2004. Membership function
adaptive fuzzy filter for image sequence stabilization.
IEEE Transactions on Consumer Electronics, 50(1).
Ertürk, S., 2002. Real-Time Digital Image Stabilization
Using Kalman Filters. Real-Time Imaging, 8:317-328.
Suk, J., Lee, G. and Lee, K., 2005. New electronic digital
image stabilization algorithm in wavelet transform
domain. Lecture Notes in Computer Science,
3802:911-916.
Pauwels, K., Lappe, M. and Hulle, M.V., 2007. Fixation
as a Mechanism for stabilization of short image
sequences. International Journal of Computer Vision,
vol. 72, pp. 67-78, 2007.
Tistarelli, M. and Sandini, G., 1993. On the advantages of
polar and log-polar mapping for direct estimation of
time-to-impact from optical flow. IEEE Transactions
on Pattern Analysis and Machine Intelligence,
15(4):401–410.
Pun, C. and Lee, M., 2003. Log-polar wavelet energy
signatures for rotation and scale invariant texture
classification. IEEE Transactions on Pattern Analysis
and Machine Intelligence, 25(5):590–603.
Metta, G., Gasteratos, A. and Sandini, G., 2004. Learning
to track colored objects with log-polar vision.
Mechatronics, 14(9):989-1006.
Manzotti, R., Gasteratos, A., Metta, G. and Sandini, G.,
2001. Disparity estimation on log-polar images and
vergence control. Computer Vision and Image
Understanding, 83(2):97–117.
Mahmoud, H., Goel, S., Shaaban, M. and Bayoumi, M.,
2006. A new efficient block-matching algorithm for
motion estimation. Journal of VLSI Signal Processing,
42:21-33.
Daniilidis, K. and Krüger, V., 1995. Optical flow
computation in the log-polar plane. In Proceedings 6th
International Conference on Computer Analysis of
Images and Patterns, Springer-Verlag, Berlin, 65-72.
Barron, J., Beauchemin, S. and Fleet, D., 1994.
Performance of optical flow techniques. International
Journal of Computer Vision, 12:43-77.
Welch, G. and Bishop, G., 2001. An introduction to the
Kalman filter. ACM SIGGRAPH 2001 Course Notes.
IMAGE SEQUENCE STABILIZATION USING FUZZY KALMAN FILTERING AND LOG-POLAR
TRANSFORMATION
475
