
NONLINEAR MODELLING IN BIOMEDICAL APPLICATIONS
USING ANNS
Vančo Litovski and Miona Andrejević Stošović
Faculty of Electronic Engineering, University of Niš, A. Medvedeva 14, 18000 Niš, Serbia
Keywords: Nonlinear modelling, hearing aid, transducer, artificial neural network.
Abstract: During the design of many biomedical prostheses based on electrical and electronic fundamental actions,
simulation is indispensable. It comprises, however, necessity for adequate models to be used. Main
difficulties related to the modelling of such devices is their nonlinearity and dynamic behavior. Here we
report application of recurrent artificial neural network for modelling of a nonlinear two-terminal circuit
equivalent to a specific implantable hearing device. The method is general in the sense that any nonlinear
dynamic two-terminal device or circuit may be modelled in the same way. The model generated was
successfully used for simulation and optimization of a driver (operational amplifier) - transducer ensemble.
That confirms our claim that optimization in the electrical domain should take place in order to achieve best
performance of the hearing aid. It is to be contrasted to the optical methods based on surgery frequently
used.
1 INTRODUCTION
Most of the prostheses that are used nowadays are
based on electrical and/or electronic transducers per-
forming appropriate conversion of electrical signals
into movement or vice-versa. Among these are the
implantable hearing aids (IHA) that are mounted in
the middle ear (Hakansson, 1994) so bypassing the
tympanic membrane. As for example that will de-
monstrate the concepts we intend to implement, Fig.
1a represents a cross section of a part of the ear and
the way how the IHA is mounted. This structure is
known as floating mass transducer (FMT) (Dietz,
T.G., 1997), (Ball G., 1996), (Dazert, S., 2000) as
depicted in Fig. 1b. It consists of a solenoid (coil)
that produces magnetic field forcing the iron core to
move forth-and-back. The movement is limited by
rubber balls that become compressed and produce
repulsive force to limit the amplitude of the displa-
cement. Note that the chamber is in vacuum to avoid
acoustic effects due to air compression and decom-
pression that would arise at the ends of the core. As
an alternative to the FMT one may find TICA
(totally integrated cochlear amplifier) as described in
(Heinrich, B. M., 2005). The proceedings that follow
are not restricted to any specific IHA.
The system may be characterized as two-termi-
nal, electro-magneto-mechanical, dynamic, and non-
linear. The dynamic behaviour comes mainly from
the coil while much of the nonlinearity comes from
the balls (or springs) that are distorted under the
pressure force. One can see from Fig. 1a that this de-
vice is excited by an electronic circuit - driver - that
we here consider is an operational amplifier (OA) si-
tuated at the output of the complex electronic system
that controls the intensity and the frequency charac-
teristic of the signal coming from the microphone.
When designing such a system we may accept
two approaches. One is to consider the electronic
circuit as fixed and to optimize the FMT to get the
desired performance. In the opposite approach, that
will be considered here, we suppose that the FMT
has fixed characteristics while the driver is subject to
optimization.
To perform this we need electrical model, i.e.
voltage-current dependence, of the FMT that will be
used in conjunction with the transistor model exis-
ting in usual electronic simulator. That will allow for
repetitive simulations with output-transistor's featu-
res optimized until optimum is reached.
In this paper we propose a new modelling proce-
dure that results in a closed form model of nonlinear
dynamic two port devices suitable for simulation
application. It is based on implementation of so cal-
led recurrent artificial neural networks (ANN). We
will also present the results obtained after one step
115
Litovski V. and Andrejevi
´
c Stošovi
´
c M. (2008).
NONLINEAR MODELLING IN BIOMEDICAL APPLICATIONS USING ANNS.
In Proceedings of the First International Conference on Biomedical Electronics and Devices, pages 115-118
DOI: 10.5220/0001055801150118
Copyright
c
SciTePress

of driver optimization that represent a serious impro-
vement in the system's high-frequency characteristic.
The paper is organized in the following way. We
first discuss the problem of electronic modelling.
After that we introduce the ANN for implementation
of the black-box modelling concept. Follows the
implementation and the results obtained.
a)
b)
Figure 1: a) Cross section of the ear showing the implant
mounted on the incus, and b) the inner structure of the
implant. (Photographs taken from Symphonix Devices
marketing material).
2 ELECTRONIC DEVICE
MODELLING
As mentioned above, we are looking for the current-
voltage characteristic of the device under conside-
ration expressed by a set of mathematical expressi-
ons. The following difficulties are encountered when
generating a model of nonlinear dynamic devices:
choice of approximation function
choice of the excitation signal
To achieve this, two approaches are implemen-
ted (Chua, L., 1975).
a. Physical approach
To implement this approach one needs to understand
physical processes in the component or system.
Advantages of this approach are: the procedure is
understandable, and there exists the correspondence
between the physical and technological quantities
and model parameters.
There are no disadvantages of the physical ap-
proach, but there is a problem when we do not
understand the whole physics of the component, or
when we are not aware of all the effects influencing
the component including parasitics.
b. Black box approach
When using this concept, the characteristics of the
modelling object have to be measured first, and
then approximated using functions that fulfill the re-
quirements imposed by the method for equation
formulation implemented within the simulator.
Advantage of the black-box approach is getting a
perfect model obtained with no need to fully know
and understand the mechanisms behind the compo-
nent’s operation. This method is specially conve-
nient for sensors and actuators modelling, because
the price of modelling is very low.
Disadvantages related to this approach are:
Difficult choice of approximation function (which
function is the most convenient?)
The model application is limited only to the con-
ditions under which the measurement was done,
referring to the signals (amplitudes, frequencies,
wave forms) and ambient (temperature, brightness
and so on).
A special problem is the choice of the test signals
needed for establishing the device properties by
measurements.
There is no correspondence between physical and
technological process parameters and model para-
meters.
Having in mind that the ambient and signal con-
ditions for operation of the transducer under consi-
deration are well established, in order to apply this
method, we will need to find appropriate approxi-
mants. That will be ANNs.
3 ANNS AND NETWORK
MODELLING
Artificial neural network is (Hecht-Nielsen, R.,
1989.):
A set of mutually coupled computational opera-
tors with specific topology and computational po-
tential, and
algorithm for determining the operator coeffici-
ents (i.e. learning).
ANNs are considered to be universal approxima-
tors, meaning that ANN can interpolate any function
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
116
(Scarselli, F., 1998). It is the motive for using ANNs
in modelling in black-box approach. They solve one
of the basic problems: choice of approximation func-
tion. To shorten the explanations we refer to (Hecht-
Nielsen, R., 1989) for detailed explanation of the
ANN’s structure and the properties of the processing
elements.
Feed-forward ANNs were successfully used for
many modelling applications the first being the mo-
delling of the MOS transistor (Litovski, V., 1992).
In (Litovski, V., 1997) a magnet with moving
armature was modelled for the first time by ANNs.
That, however, having no memory properties, is not
convenient for modelling of dynamic circuits and
systems. In order to introduce the memory property
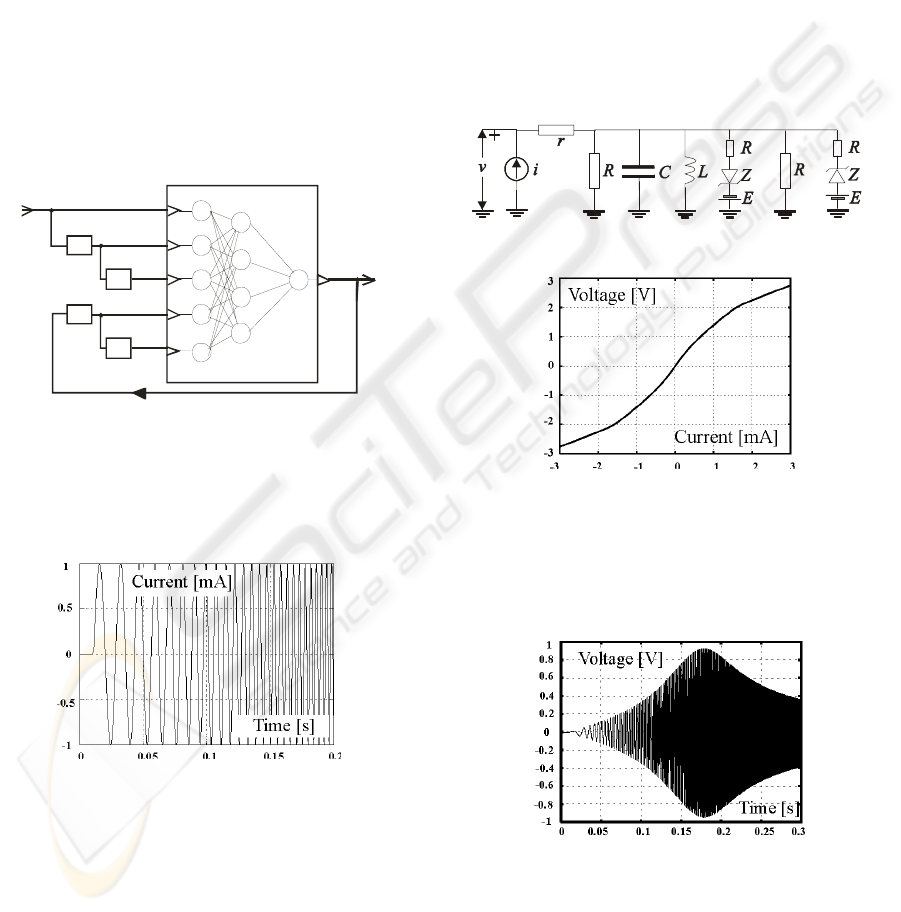
a structure depicted in Fig. 2 has to be used. It is
time a delayed recurrent ANN.
Dt
ANN
y
n
y
n-
1
y
n-
2
x
n-
2
x
n-
1
x
n
x
n
Dt
Dt
Dt
Figure 2: A time delayed recurrent ANN.
The learning procedures for such a network in-
cluding choice of its complexity may be found in
(Bernieri, A., 1994.).
Figure 3: The exciting signal used for modelling.
To capture the dynamic properties of the system
to be modelled and its nonlinearities by measure-
ment, we propose the chirp signal depicted in Fig. 3.
It is a constant amplitude linearly frequency modu-
lated signal. The frequency interval is to be chosen
so that to cover the complete frequency characteris-
tic of the device while the amplitude is supposed to
be large enough to capture all relevant nonlineari-
ties.
To create the neural model of the device under
consideration, after measurement, samples from the
time domain response of the devices are used to train
the ANN, as described in (Andrejević, M., 2002)
and
(Andrejević, M., 2003). After training the ANN is
supposed to capture all electrical properties of the
device seen from its terminals.
4 IMPLEMENTATION EXAMPLE
In order to demonstrate the method, instead of using
a specific device, we propose a nonlinear dynamic
electronic circuit (NDEC) as depicted in Fig. 4.
1
1
1
3
2
2
2
Figure 4: Nonlinear dynamic two terminal circuit.
Figure 5: The static characteristic of the NDEC.
Its static characteristic is depicted in Fig. 5, while
Fig. 6 represents its response to a chirp signal. After
extracting the envelope one obtains the frequency
response of the circuit as depicted in Fig. 7.
Figure 6: Time domain response of the test circuit.
Samples of the response from Fig. 6 were used to
train the ANN in the time domain. Its response after
training is exactly the same as the response of the
original NDEC and is drawn in Fig. 7 overlapped
with the frequency response of the original circuit.
NONLINEAR MODELLING IN BIOMEDICAL APPLICATIONS USING ANNS
117
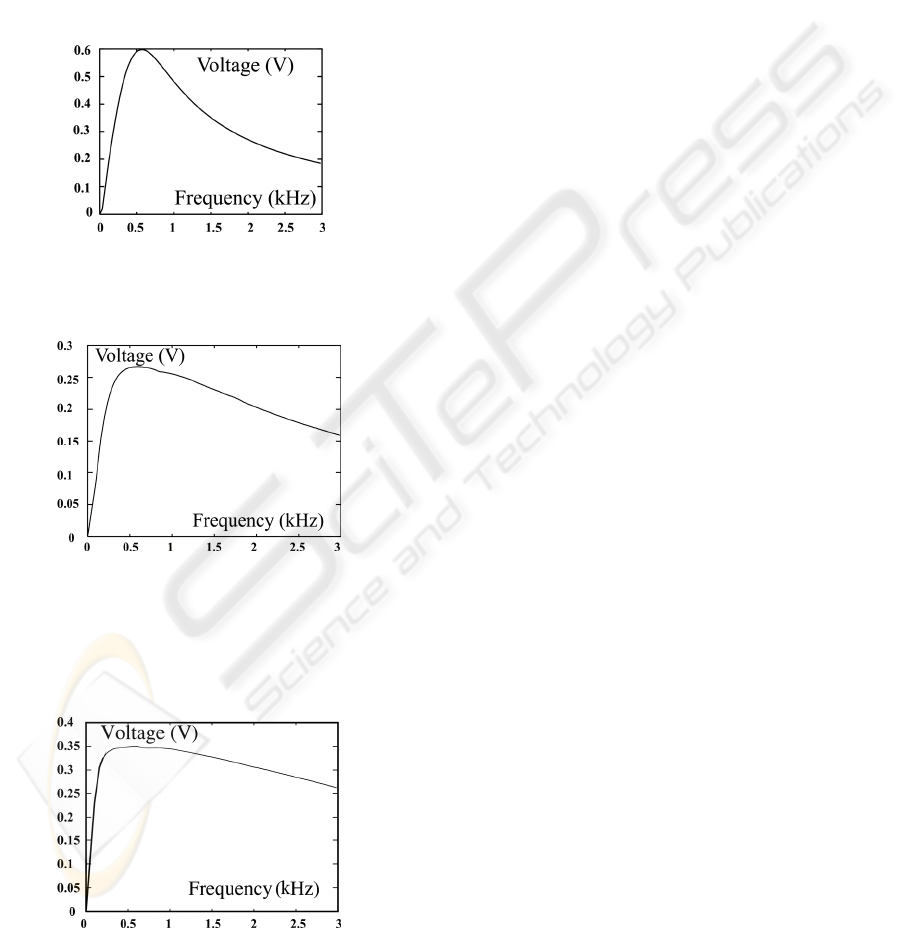
That was used to load an OA supposed to drive
the NDEC. The overall response of the driver-trans-
ducer ensemble is depicted in Fig. 8. This result is
by itself an important one because it shows the abi-
lity of simulation of the NDEC in every envi-
ronment.
To go further we redesigned (only one iteration)
the output part of the OA in order to improve the
frequency response of the ensemble. The result of
the new design is depicted in Fig. 9. representing a
full success.
Figure 7: Frequency characteristic of the element being
modelled (envelope of the time response), and Frequency
characteristic of the model.
Figure 8: Frequency characteristic of the response of the
OA loaded by the NDEC.
5 CONCLUSIONS
Figure 9: Frequency characteristic of the improved OA
loaded by the NDEC.
A procedure for modelling nonlinear dynamic
two-terminal circuits equivalent to IHAs is
described. It enables complete characterization of
the device and, in the same time, simulation and
optimization of the driving circuitry. That, we
consider, is more effective way for characterization
of the device in comparison with optical methods,
not to mention the optimization possibilities.
REFERENCES
Andrejević, M., Litovski, V., 2002. Non-Linear Dynamic
Network Modelling Using Neural Networks, Int. Con-
gress on Comp. and Appl. Math., Leuven, pp. 16.
Andrejević, M., Litovski, V., 2003. Electronic Modelling
using ANNs For Analogue and Mixed-Mode Behavi-
oral Simulation, Journal of Automatic Control, Uni-
versity of Belgrade, Vol. 13, No. 1, pp. 31-37.
Ball G, Maxfield B., 1996. Floating mass transducer for
middle ear applications. Sec. Int. Symp Electr Impl,
Goeteborg, pp. 8.
Bernieri, A., et all., 1994. A Neural Network Approach for
Identification and Fault Diagnosis on Dynamic
Systems, IEEE Trans. on Instrumentation and Mea-
surement, Vol. 43, No. 6.
Chua, L.O., and Lin, P.M., 1975. Computer-Aided Ana-
lysis of Electronic circuits, Prentice-Hall, New Jersey.
Dazert, S., et all., 2000. Das Mittelohrimplantat „Vibrant
Soundbridge” zur Hörrehabilitation bei sensorischer
Schwerhörigkeit, Otologie, Laryngorhinootologie,
Vol. 79, pp. 459-464.
Dietz, T.G. Ball, G.R. Katz, B.H., 1997. “Partially imp-
lantable vibrating ossicular prosthesis”, Int. Conf. on
Solid State Sensors and Actuators, Transducers '97,
Chicago, Vol. 1, pp. 433-436.
Hakansson, B. E., et all., 1994. “The bone-anchored hea-
ring aid: principal design and audiometric results”,
Ear-Nose-Throat J., Vol. 73, No. 9, pp. 670-675
Hecht-Nielsen, R., 1989. Neurocomputing, Addison-Wes-
ley Publishing Company, Reading, MA.
Heinrich, B. M., 2005. Evaluation eines VR (Virtuelle Re-
alität)-Systems zur Ctbasierten Operationsplanung an
der lateralen Schädelbasis, Inaugural-Diss. zur
Erlangung des Doktorgrades, Medizinischen Fakultät
der Eberhard-Karls-Universität zu Tübingen.
Litovski, V.B. et all., 1992. MOS transistor modelling
using neural network", Electronics Letters, Vol. 28,
No.18, pp. 1766-1768
Litovski, V.B. , Mrčarica, Ž., and Ilić, T. , 1997. Simulati-
on of non-linear magnetic circuits modelled using ar-
tificial neural network", Simulation practice and The-
ory, Vol. 5, pp. 553-570.
Scarselli, F., Tsoi, A.C., 1998. Universal Approximation
Using Feedforward Neural Networks: A Survey of So-
me Existing Methods, and Some New Results, Neural
Networks, Elsevier Science, Vol. 11, No. 1, pp 15-37.
BIODEVICES 2008 - International Conference on Biomedical Electronics and Devices
118
