
A Dialogue Manager for an Intelligent Mobile Robot
Marcelo Quinder
´
e, Lu
´
ıs Seabra Lopes and Ant
´
onio J. S. Teixeira
IEETA, Departamento de Electr
´
onica e Telecomunicac¸
˜
oes
University of Aveiro
3810-193 Aveiro, Portugal
Abstract. This paper focuses on a dialogue manager developed for Carl, an intel-
ligent mobile robot. It uses the Information State (IS) approach and it is based on
a Knowledge Acquisition and Management (KAM) module that integrates infor-
mation obtained from various interlocutors. This mixed-initiative dialogue man-
ager handles pronoun resolution, it is capable of performing different kinds of
clarification questions and to comment information based on the current knowl-
edge acquired.
1 Introduction
Personal robots, intelligent service robots capable of performing useful work in close
cooperation/interaction with humans, are expected to be the next generation of robots.
“Integrated Intelligence” [10] identifies an approach to building such agents in which
the integration of key aspects is considered, including linguistic communication, rea-
soning, reactivity and learning.
This is the scope of CARL (Communication, Action, Reasoning and Learning in
Robotics), a research project started in our institute in 1999, in the framework of which
a robot prototype was developed, Carl [9]. The software architecture of Carl, which is
based on the Open Agent Architecture (OAA) [6], uses a community of agents to handle
general perception and action, display appropriate emotions through an animated face,
process natural language and manage the robot.
Carl has been using a dialogue management approach based on finite state ma-
chines. In each predefined state, state transitions specify which actions the robot is
supposed to execute under different conditions and which new states are reached. Sev-
eral speech acts are supported including declarations (tell), questions (ask, ask
if) and
commands (achieve). A Knowledge Acquisition and Management (KAM) module [11]
integrates information obtained from different interlocutors, even if they are contradic-
tory, and provides replies to received questions. The dialog management approach used
until now has several limitations. It follows a mostly single-initiative strategy, since
most dialogues are started by the user. On the other hand, it lacks capabilities for ambi-
guity resolution, clarification of misrecognized sentences and confirmation of sentences
with low recognition confidence.
This paper focuses on the dialogue manager now being developed to address these
limitations. It uses the Information State (IS) approach to dialogue systems [12]. The
approach allows for mixed initiative dialogs. It also supports the use of pronouns and
Quinderé M., Seabra Lopes L. and J. S. Teixeira A. (2007).
A Dialogue Manager for an Intelligent Mobile Robot.
In Proceedings of the 4th International Workshop on Natural Language Processing and Cognitive Science, pages 191-200
DOI: 10.5220/0002431901910200
Copyright
c
SciTePress

generates clarification/confirmation questions when the Automatic Speech Recognizer
(ASR) confidence is low and/or the sentences are ungrammatical. Finally, it is able to
produce comments on the information just acquired and it is also able to give informa-
tive answers
The paper is structured as follows. Section 2 presents different types of dialogue
systems. Section 3 describes the developed dialogue manager. Section 4 presents an
evaluation. Section 5 concludes the paper with reference to future work.
2 Dialogue Systems
Dialogue Systems can be divided into the following types [4]:
1. Finite State Systems – A finite state machine represents the dialogue, which means
that every state transition has to be coded in the system. These transitions occur
when the user gives the information the system was waiting for, usually a short
phrase or even isolated words. Most Finite State Systems do not give much freedom
to the user because the answers have to be given in a preset order. Besides, the user
should not answer more than it was asked. As mentioned, our robot Carl also used
until now a finite state approach. Although there are no constraint in the order of
declarations/questions and the sentences can be quite complex, the approach is not
flexible enough to address other problems, such as ambiguity, misrecognition and
low recognition confidence.
2. Frame-Based Systems– These systems have frames with fields that need to be filled
in order to allow a database query. The user is free to give as many answers as he
wants, and the system is capable of handling that.
3. Advanced Systems – They are mixed-initiative, either the user or the system can
have the control of the conversation.
(a) Belief, Desire, Intention (BDI) Models – The majority of the dialogue systems
that use BDI models [2] are plan based. For instance, if an agent needs an
information, it can set a plan that includes asking something to get the missing
information. Analogously, an agent that hears a question can infer why it was
made.
(b) Markov Decision Process (MDP) – in order to use them, a model that defines
the behavior of the system is needed. For that, two methods can be used:
– adjust the state number and policies to the minimum, build a system that
explore the state space through random dialogues and then a model can be
built from the created corpus.
– develop a simulated user that interacts with the system a million times,
then the system can learn from the corpus
(c) Information State Systems – A dialogue context data structure, called informa-
tion state, is kept and identifies what happened to the dialogue and also bases
the dialogue manager decisions.
192

2.1 Some Dialogue Managers
Florence is a dialogue manager framework developed by AT&T [3]. This framework
was made to support the development of a Spoken Dialogue System (SDS) with mul-
tiple dialogue strategies, instead of focusing on a single strategy, e.g. call routing or
plan-based interaction.
Each dialogue can be guided by a different strategy, such as an Augmented Transi-
tion Network (ATN) strategy, which is a finite state machine extension, a clarification
strategy or a rule-based strategy. The usual is ATN, which acts on the input and on the
local context to control the interaction flow.
ASIMO is a conversational service robot. Nakano et al [7] propose a two-layer model
for the behavior and dialogue planning in robots of that kind. They named their module
MEBDP (Multi-Expert-based Behavior and Dialogue Planning), which is divided in:
upper layer – a task planning layer responsible for decomposing a task into subtasks;
lower layer – an expert action selection layer that performs the subtasks using experts.
There are four types of experts: request understanding, information providing, physical
action planning and information obtaining dialogue experts
Jijo-2 is an office service robot that is able to communicate and learn about its environ-
ment [1]. The dialogue is handled by a finite state machine and so the robot’s answer
depends on its state. There are five kinds of tasks: consult database, database update,
person identification, navigation and people calling.
Authors point out that the dialogue system’s main problem is that the design of
the state transition network is ad hoc and very task dependent. Another problem is
the informal semantic representation of utterances, which makes it hard to extend the
system to other tasks.
3 Description of the Dialogue Manager Developed
3.1 Requirements
The robot Carl should be able to carry on a dialogue like the one shown in Table 1. In
order to do that, Carl’s dialogue manager should have at least the following character-
istics:
– Reactive – it should react appropriately to a user utterance
– Dialogue context – for reference resolution, for pronoun use and for selecting the
most suitable action
– Reference resolution – so far used for understanding pronouns
– Ellipse – for understanding incomplete sentences
– Pronoun clarification – when the reference resolution is not able to resolve one or
more pronouns
– Pronoun use – when speaking, it should use as much pronouns as it can to make
the dialogue smooth
193

– Clarification – when confidence level of the ASR is low
– Comment – when receiving new information, it should make comments if possible
– Informative – when answering, it should be as much informative as it can, avoiding
just “no” answers
– Grounding – system should make clear that it understood the user
1
– Mixed initiative – both the user and the system should be able to have the initiative
of the dialogue
Table 1. Fictitious dialogue with robot Carl.
Speaker Utterance Requirement
User: Hi! dialogue context update
Carl: Hi! I’m the robot Carl. reactive
Carl: What’s your name? initiative
User: Jim. dialogue context update, ellipse
Carl: What can I do for you? give initiative
User: Is he in the institute? dialogue context update
Carl: Who do you mean? reactive, pronoun clarification
User: Peter. dialogue context update, ellipse
Carl: No, he is in the department. reactive, informative, dialogue context use, pronoun use
User: Does he like you? reference resolution, dialogue context use/update
Carl: Yes. reactive, informative
User: Mary lives in Spain. dialogue context update
Carl: Did you say that Mary lives in Spain? reactive, clarification
User: Yes. dialogue context update
Carl: Really? Daniel lives in Spain too! reactive, comment
3.2 Information State Approach
From all the types of dialogue systems shown, an Information State (IS) approach was
chosen to be used on the dialogue manager for being advanced, flexible, and able to
address all the requirements mentioned before.
The developed dialogue manager is composed by:
– information state description – identification of the IS components
– events – external occurrences that evoke an information state update
– IS update rules – define when and how to update the information state
– action selection – defines which action to perform next
– control module – controls which update rules are applied and selects the next action
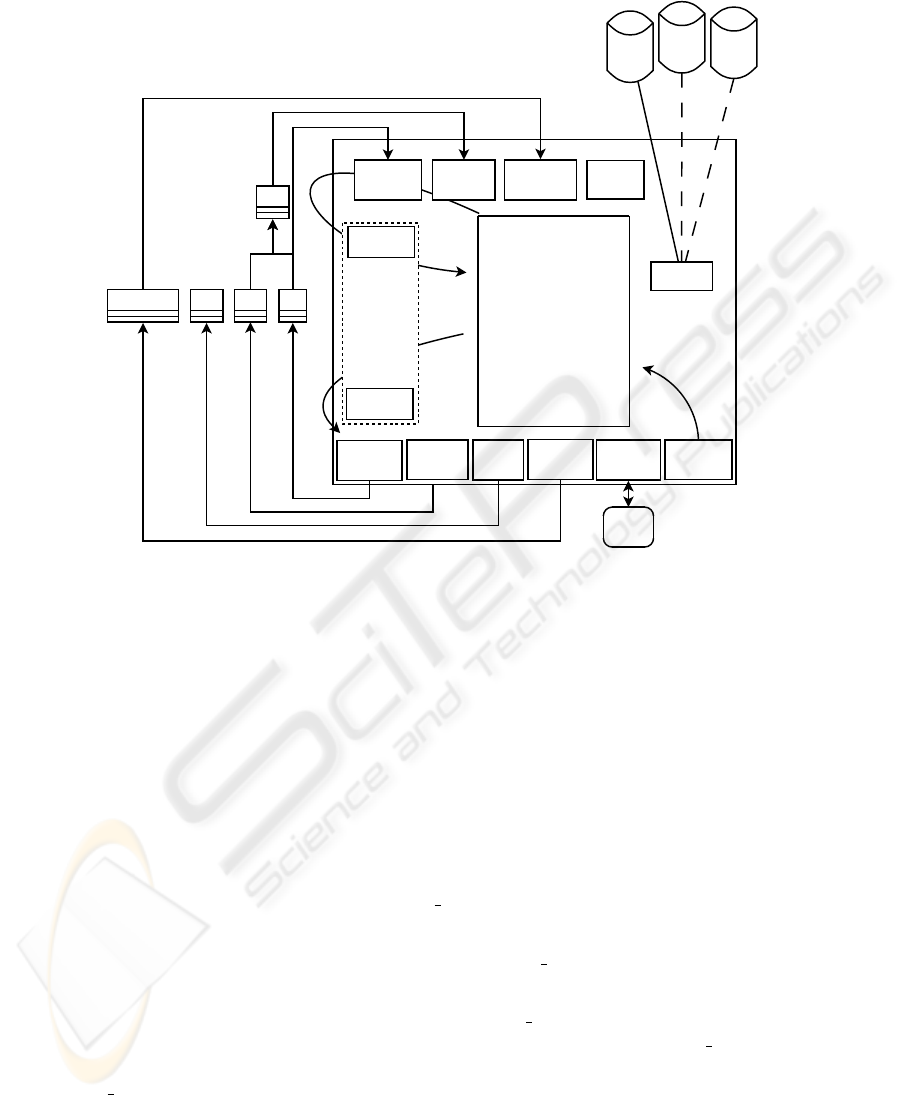
Carl’s software architecture is composed of following agents: Graphical and Touch
Interface (GTI), Automatic Speech Recognizer(ASR), Natural Language Understand-
ing (NLU), Natural Language Generation (NLG), Synthesis, Navigation and Manager.
Figure 1 shows an overview of the dialogue manager. One can see that it commu-
nicates directly to the agents: Navigation, NLG, ASR and GTI, as well as the KAM
module. The IS includes fields to handle the NLU input, task managent, dialogue initia-
tive and turn, user information, referenced objects (referents), questions performed by
the system, events and robot control.
1
currently, grounding is done by explicit display of ASR output on the screen
194
Navigation
event
timeouts
events
actions
IS
input_clarified
input_resolved
task_list
task_history
last_nlu_events
action_history
ask_history
referent_list
user_name
turn
initiative
user_presence
mode
ieeta
domain
hobbie
domain
domain
others
domain
IS / domain
consult
ASR
command
KB consult
or update
Navigation
command
GTI
command
speech
act
ASR
NLU
GTINavigation NLG
control
select
update
GTI
event
NLU
event
KAM
module
Fig.1. Dialogue manager design overview.
Timeouts and events generated by the agents GTI, NLU and Navigation allow IS
updates. The control module applies update rules (which can add tasks to the task list)
and then select the next action to take (based on the current task list). Therefore, the
behavior of the system is: receive events, update information state, select action and
act.
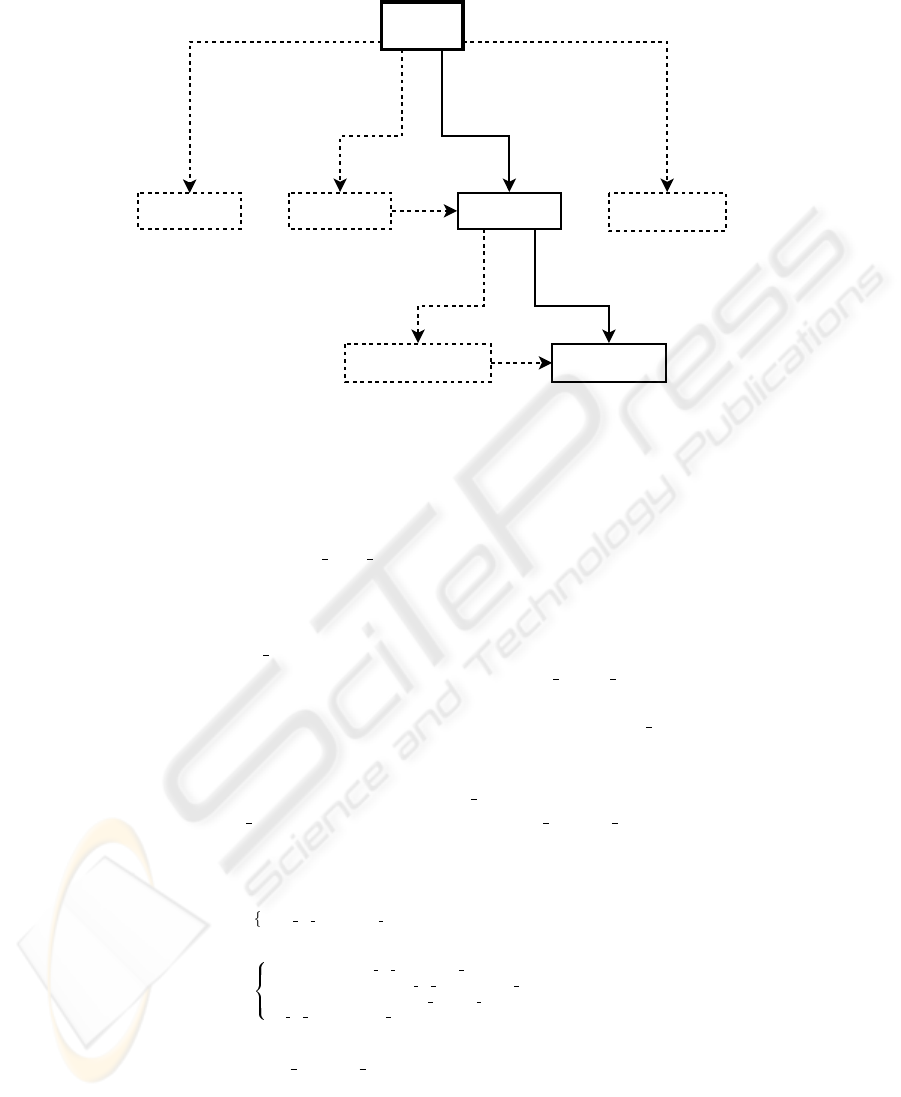
Figure 2 shows the IS update flow of the NLU event. If the ASR confidence level
is too low (less than 30%), the information is rejected and the task reject handles it.
The semantic extraction can be shallow – performed by Tilburg Memory Based Learner
(TiMBL) or deep – performed by LCFlex (details in [8]). If it is a TiMBL analysis and
the ASR confidence is above 30%, a clarify
timbl task is added.
If it is a LCFlex analysis and the ASR confidence is between 30% and 70%, a clarify
task is added so the information can go to the field input
clarified. If the confidence is
above 70%, the information goes directly.
When there is a valid information on the field input
clarified, pronoun resolution is
evoked. If all pronouns can be resolved, the information is put on the field input resolved.
If there is no referent for a pronoun or the system has two good choices, the clar-
ify
pronouns task is added.
195
NLU event
input_clarified
input_resolved
task clarify
task clarify_pronouns
task clarify_timbl
30% < Confidence < 70%
analysis = lcflex
Confidence > 70%
analysis = lcflex
resolvednot resolved
task reject
Confidence < 30%
Confidence > 30%
analysis = timbl
Fig.2. Update flow of NLU event.
3.3 Dialogue Manager Control Algorithm
The dialogue manager control is performed by the algorithm 1. After receiving the
events, the procedure perform
state update() is called, which applies all the update rules
that have the conditions satisfied. Note that the actions are performed while the system
has the turn and, of course, actually has an action to perform. The IS field turn is updated
when the user or the system perform a speech act.
Since tasks in task
list are sorted by priority, the control algorithm uses the first one
to select the next action by calling the procedure perform
action selection(Task). The
procedure act(NextAction) executes the action and updates the history.
One should note that the execution is finalized when the program state field has a
stop value.
The rule updateReferentList (1) is an example of an update rule. It is applied when-
ever there is a valid value in the IS field input
resolved. Its main effect is to update
the IS field referent
list by calling the procedure update referent list with the current
referent list and the semantics just received.
Rule : updateReferentList
Conditions :
valid IS value(input resolved)
Effects :
InputValue ← get IS value(input resolved)
ReferentListValue ← get
IS value(referent list)
NewReferentList ← update
referent list(ReferentListValue, InputValue))
set
IS value(referent list, NewReferentList)
(1)
The procedure update
referent list is a simplified version of the algorithm described
in [5] because the robot is designed to handle sentences much more simpler than the
196

Algorithm 1: control().
begin
repeat
receive events()
perform
state update()
repeat
Task ← get IS list head(task list)
NextAction ← perform
action selection(Task)
if NextAction 6= null then
act(NextAction)
TurnValue ← get
IS value(turn)
until TurnValue = user ∨ NextAction = null
ProgramStateValue ← get
IS value(program state)
until ProgramStateValue = stop
end
ones addressed by the original algorithm. The main difference is the use of less salience
factor types and filters. To support the reference resolution, a list of the referents men-
tioned in the dialogue are updated by the algorithm 2.
Algorithm 2: update referent list(ReferentList, Semantics).
begin
foreach referent[i] in ReferentList do
if referent[i].age = 3 then
delete(ReferentList, referent[i])
else
referent[i].age = referent[i].age + 1
referent[i].salience = referent[i].salience/2
TempList ← extract referents(Semantics)
NewReferentList ← merge(ReferentList, TempList)
NewReferentList ← sort
by(NewReferentList, salience)
return NewReferentList
end
Each referent has a salience value associated, which is used to sort the list. These
values are reduced to the half every time a new sentence is evaluated. This is to give
priority to the recent referents. Other detail is that the list only keeps the referent men-
tioned in the last four sentences.
As a plan example, one can see the store info plan (2). Basically, it stores informa-
tion acquired from the user by calling the procedure kb
update of the KAM module.
Since this module support contradictory information (details in [11]), it needs the user
name to associate to every information it keeps, so the task get user name is the first
step in this plan. After the information is stored, another procedure from the KAM
197

module is called, kb comment info. This one tries to generate a comment based on the
semantics given and on the current state of the knowledge base. If it succeeds, Status
is set to ok, otherwise, not
ok. If we do have a comment, the plan is to use pronouns if
we can (by calling replace names by pronouns) and then send a message to NLG agent
with the semantics of the comment. Otherwise, the message is just an acknowledgement
that the information was stored.
There is one task that generates questions to the user based on the current knowledge
acquired. This task is added by a IS update rule when the system has the initiative on
the dialogue.
Plan : store
info(+RecConf, +Semantics)
Operations :
task(get user name(UserName)),
action(kb
update(UserName, RecConf, Semantics)),
action(kb
comment info(Semantics, Comment, CommentConfidence, Status)),
if
then else(
Status = ok,
[action(replace
names by pronouns(UserName, ReferentList, Comment, PronounComment)),
oaa
action(nlg(comment, release-turn, , , PronounComment, CommentConfidence))],
[oaa
action(nlg(ack, release-turn, , , , ))]
)
(2)
4 First Results
A scenario was built with the purpose of checking if a dialogue like the one showed in
Table 1 could really be carried on by the dialogue manager. In that dialogue, the robot
showed that it already had acquired some knowledge, namely that: 1) Peter is in the
department, 2) Peter likes Carl, 3) Daniel lives in Spain. So for the test, these facts were
previously added to the knowledge base using the KAM module.
As the dialogue manager was just developed and is not fully integrated in the robot
system yet, the output of the spoken language understanding (SLU) was simulated in
this test. For each user utterance in the target dialogue a semantic representation was
manually created. An ASR confidence of 75% was used, as well as a lcflex analysis
label. Except on the “Mary lives in Spain” representation, in which a 50% confidence
was used in order to force a clarification case.
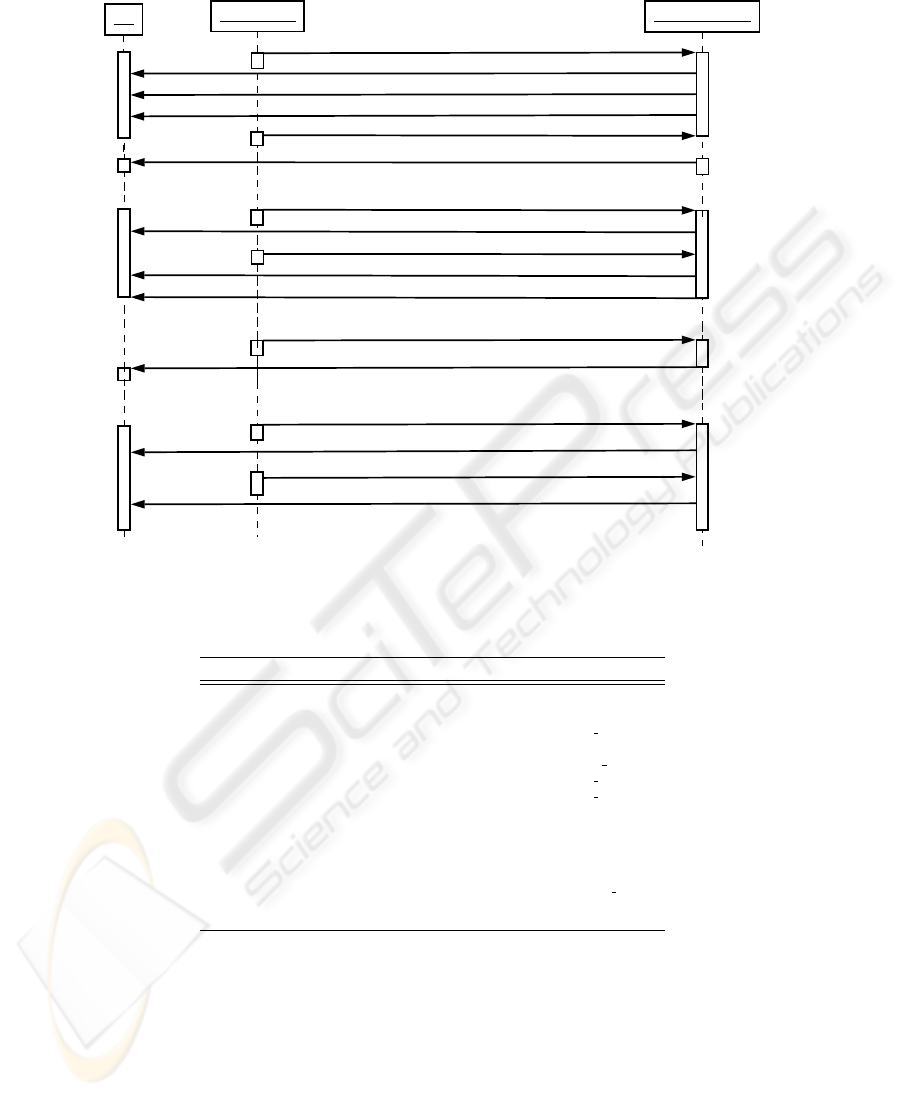
Figure 3 shows the messages exchanged by the “simulated SLU”, the dialogue man-
ager and the NLG. One can see that the dialogue was fully accomplished. In order to
improve the comprehension of those messages, the target dialogue is shown again in
Table 2, but this time with the respective agent and speech acts associated to each utter-
ance.
5 Conclusion and Future Work
The development of a dialogue manager for the intelligent mobile robot Carl was pre-
sented. It uses the Information State (IS) approach to dialogue systems and it is based
198
nlu(75, lcflex, sem(greet, _, _, _))
nlg(greet, keep-turn, _, _, _, _)
nlg(introduce, keep-turn, _, _, _, _)
nlg(ask_name, release-turn, _, _, _, _)
nlu(75, lcflex, sem(reply, _, _, [name_(_, jim)]))
Simulated SLU
nlg(offer_help, release-turn, _, _, _, _)
nlu(75, lcflex, sem(ask_if, _, _, [pronoun_(X, he), association_(be_in, X, Y), instance_(Y, institute)]))
nlg(ask_pronoun, release-turn, who, _, [pronoun_(_, he)], _)
nlu(75, lcflex, sem(reply, _, _, [name_(_, peter)]))
nlg(tell, keep-turn, _, _, no, _)
nlg(tell, release-turn, _, _, [pronoun_(1, he), association_(be_in, 1, 2), instance_(2, department)], 0.42)
nlu(75, lcflex, sem(ask_if, _, _, [pronoun_(X, he), association_(like, X, Y), pronoun_(Y, you)]))
nlg(tell, release-turn, _, _, yes, 0.42)
nlu(50, lcflex, sem(tell, _, _, [name_(X, mary), association_(live, X, Y), name_(Y, spain)]))
nlg(clarify_tell, release-turn, _, _, [name_(X, mary), association_(live, X, Y), name_(Y, spain)], _))
nlu(75, lcflex, sem(reply, _, _, [instance_(_, yes)]))
nlg(comment, release-turn, _, _, [name_(4, daniel), association_(live, 4, 5), name_(5, spain)], 0.42)
NLG
Dialogue Manager
Fig.3. Dialogue Manager Test.
Table 2. Fictitious dialogue with robot Carl.
Speaker Utterance Agent Speech Act
User0: Hi! NLU greet
Carl0: Hi! I’m the robot Carl. NLG greet, introduce
Carl1: What’s your name? NLG ask
name
User1: Jim. NLU tell
Carl2: What can I do for you? NLG offer
help
User2: Is he in the institute? NLU ask
if
Carl3: Who do you mean? NLG ask
pronoun
User3: Peter. NLU tell
Carl4: No, he is in the department. NLG tell, tell
User4: Does he like you? NLU ask
Carl5: Yes. NLG tell
User5: Mary lives in Spain. NLU tell
Carl6: Did you say that Mary lives in Spain? NLG clarify
tell
User6: Yes. NLU tell
Carl7: Really? Daniel lives in Spain too! NLG comment
on a Knowledge Acquisition and Management (KAM) module that integrates informa-
tion obtained from various interlocutors, even if they are contradictory. This mixed-
initiative dialogue manager handles pronoun resolution, it is capable of performing dif-
ferent kinds of clarification questions and to comment information based on the current
knowledge acquired.
199

Although the dialogue manager is not fully integrated in the robot system yet, a pre-
liminary evaluation has shown that it is indeed capable to carry out complex dialogues.
It should also be mentioned that it addresses all the requirements of a dialogue manager
to be used on the robot Carl.
Current work includes the adjustment of the NLU and NLG agents to support the
speech acts introduced by the new dialogue manager, which will allow the integration
of the dialogue manager itself on the robot system.
References
1. H. Asoh and et. al. Jijo-2: an office robot that communicates and learns. IEEE Intell. Systems,
16(5):46–55, 2001.
2. Michael E. Bratman, David Israel, and Martha Pollack. Plans and resource-bounded practical
reasoning. In Robert Cummins and John L. Pollock, editors, Philosophy and AI: Essays at
the Interface, pages 1–22. The MIT Press, Cambridge, Massachusetts, 1991.
3. Giuseppe Di Fabbrizio and Charles Lewis. Florence: a dialogue manager framework for
spoken dialogue systems. In ICSLP 2004, 8th International Conference on Spoken Language
Processing, Jeju, Jeju Island, Korea, October 4-8 2004.
4. D. Jurafsky and J. H. Martin. Speech and Language Processing. to be published, 2nd edition,
2007.
5. S. Lappin and H. J. Leass. An algorithm for pronominal anaphora resolution. Comp Ling.,
20:535–561, 1994.
6. D. Martin, A. Cheyer, and D. Moran. The Open Agent Architecture: a Framework for Build-
ing Distributed Software Systems. App. Artif. Intelligence, 13:91–128, 1999.
7. M. Nakano, N. Kanda, and et al. A Two-Layer Model for Behavior and Dialogue Planning
in Conversational Service Robots. In IROS, pages 1542–1548, 2005.
8. M. Rodrigues, A. Teixeira, and L. Seabra Lopes. An Hybrid Approach for Spoken Natural
Language Understanding Applied to a Mobile Intelligent Robot. In NLUCS, pages 145–150,
Porto, Portugal, 2004.
9. L. Seabra Lopes. Carl: from situated activity to language level interaction and learning. In
IROS, volume 1, pages 890 – 896, Lausanne, Switzerland, 2002.
10. L. Seabra Lopes and J. H. Connell. Guest editors’ introduction: Semisentient robots– routes
to integrated intelligence. IEEE Intelligent Systems, 16(5):10–14, 2001.
11. L. Seabra Lopes, A. Teixeira, and M. Quinder
´
e. A Knowledge Representation and Reasoning
Module for a Dialog System in a Mobile Robot. In NLUCS, pages 172 – 177, Miami, USA,
2005.
12. D. Traum and S. Larsson. The Information State Approach to Dialogue Management. In
Jan van Kuppevelt and Ronnie Smith, editor, Current and New Directions in Discourse and
Dialogue. Kluwer, 2003.
200
